吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (6): 1229-1244.doi: 10.13229/j.cnki.jdxbgxb20210893
• 综述 •
地面车辆机动性评估方法与应用
华琛1,2( ),牛润新1,余彪1()
),牛润新1,余彪1()
- 1.中国科学院 合肥物质科学研究院,合肥 230031
2.中国科学技术大学 研究生院科学岛分院,合肥 230026
Methods and applications of ground vehicle mobility evaluation
Chen HUA1,2(),Run-xin NIU1,Biao YU1()
- 1.Hefei Institutes of Physical Science,Chinese Academy of Sciences,Hefei 230031,China
2.Science Island Branch of Graduate School,University of Science and Technology of China,Hefei 230026,China
摘要:
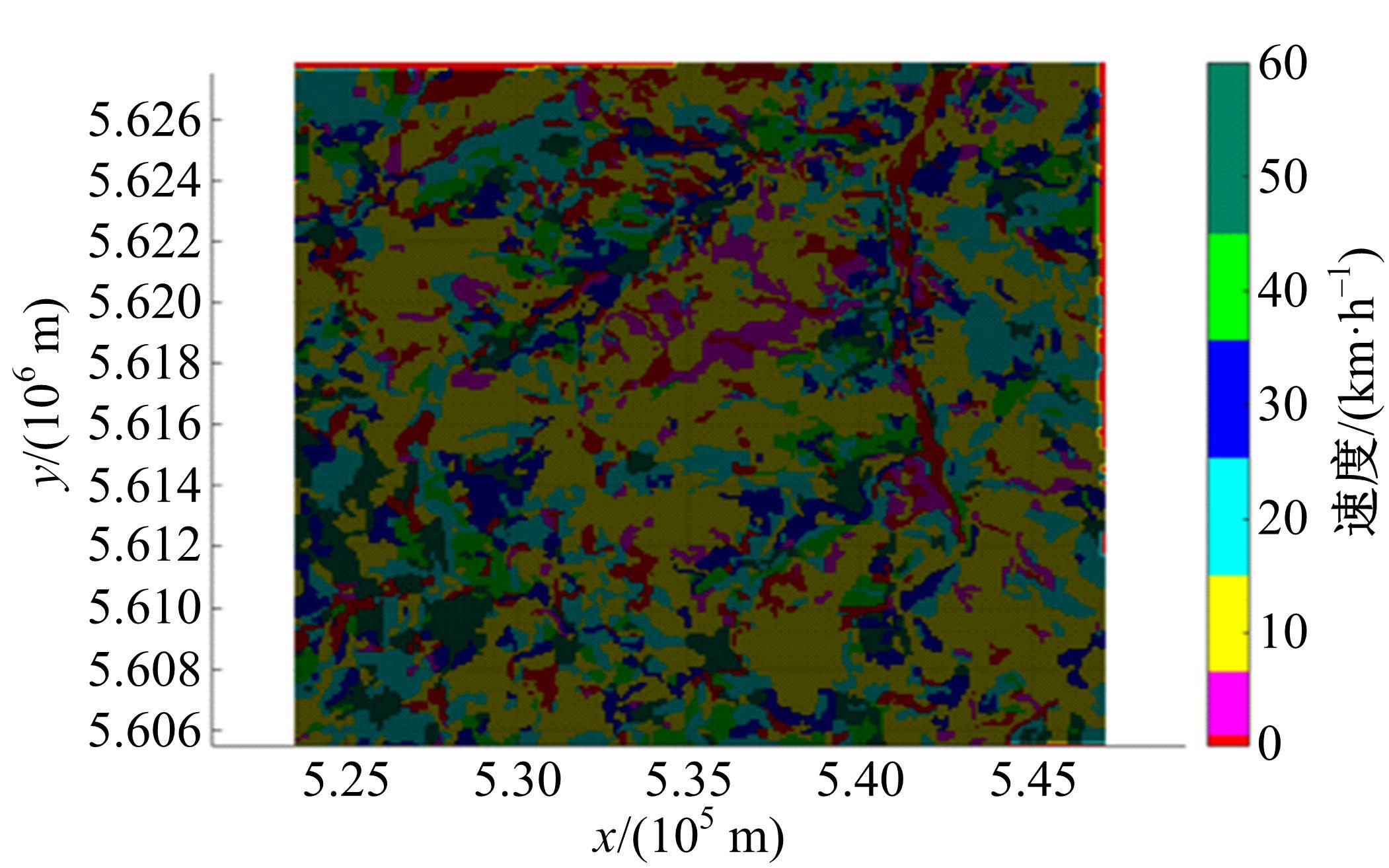
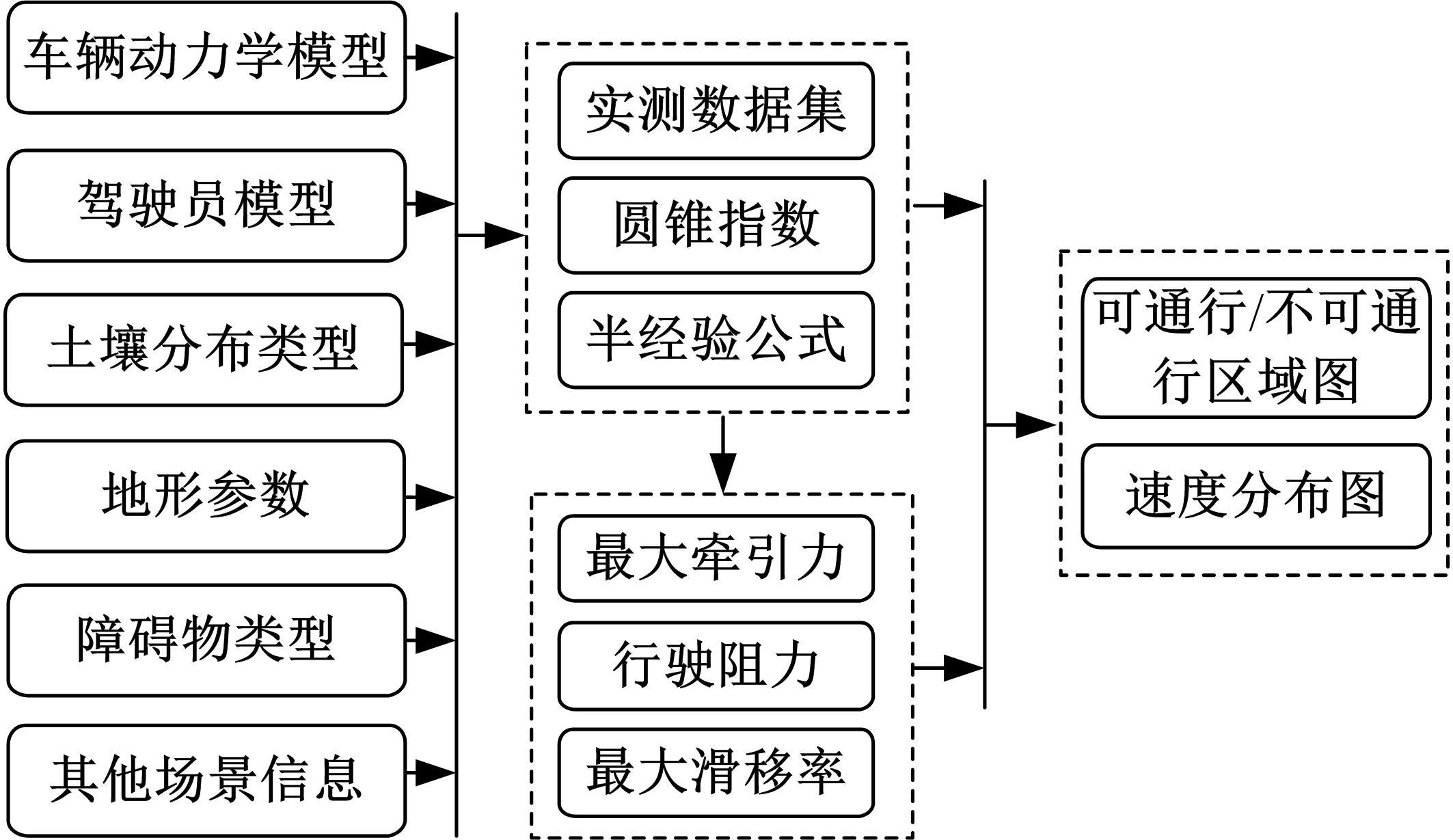
首先,讨论了地面车辆机动性的内涵,对基于经验、半经验、数值模拟以及机器学习等当前地面车辆机动性评估的主要方法进行了全面、系统的总结,并对比分析了各种方法的优缺点。然后,从军用领域、海底作业、行星探索以及农业作业等机动性评估的应用场景进行了分析讨论。最后,针对目前车辆机动性评估方法中存在的一些问题,从车辆机动性实时评估和地形实时感知、变形地形上的路径规划以及无人系统自主机动性评估等关键技术和应用方面提出了一些探索性的研究方向,为车辆机动性评估方法的后续发展提供了有益的参考。
中图分类号:
- U461.5








| 1 | 杨帆. 基于车轮力测试的车辆地面通过性关键技术研究[D]. 南京: 东南大学仪器科学与工程学院, 2016. |
| Yang Fan. Research on key techniques of vehicle trafficability based on wheel force test[D]. Nanjing: School of Instrument Science and Engineering, Southeast University, 2016. | |
| 2 | Wong J Y, Jayakumar P, Toma E, et al. A review of mobility metrics for next generation vehicle mobility models[J]. Journal of Terramechanics, 2020, 87: 11-20. |
| 3 | 李灏, 刘新全. 基于圆锥指数评估车辆机动性能综述[J]. 农业装备与车辆工程, 2011, 49(7): 16-20. |
| Li Hao, Liu Xin-quan. Summary of evaluating the mobility of vehicle based on cone index[J]. Agricultural Equipment & Vehicle Engineering, 2011, 49(7):16-20. | |
| 4 | 宁俊帅, 李军, 李灏, 等. 军用车辆机动性评估方法[J]. 兵器装备工程学报, 2009, 30(5): 49-51. |
| Ning Jun-shuai, Li Jun, Li Hao, et al. Military vehicle mobility evaluation methods[J]. Journal of Ordnance Equipment Engineering, 2009, 30(5): 49-51. | |
| 5 | 白意东, 孙凌宇, 张明路, 等. 履带机器人地面力学研究进展[J]. 机械设计, 2020, 37(10): 1-13. |
| Bai Yi-dong, Sun Ling-yu, Zhang Ming-lu, et al. Progress of research on terramechanics for tracked mobile robots[J]. Journal of Machine Design, 2020, 37(10): 1-13. | |
| 6 | 刁增祥,余建星. 军用车辆的机动性等级和模型[J]. 汽车工程, 2005, 27(3): 354-357. |
| Diao Zeng-xiang, Yu Jian-xing. Mobility grade and model of military vehicles[J]. Automotive Engineering, 2005, 27(3): 354-357. | |
| 7 | Ahlvin R B, Haley P W. NATO reference mobility model edition II[R]. Vicksburg: USA Army Corps of Engineers Waterways Experiment Station, 1992. |
| 8 | Sohne W. Four-wheel drive or rear-wheel drive for high power farm tractors[J]. Journal of Terramechanics, 1968, 5(3): 9-28. |
| 9 | 张克健. 车辆地面力学[M]. 北京: 国防工业出版社, 2002. |
| 10 | Bekker M G. Introduction to Terrain-vehicle Systems[M]. Ann Arbor,MI:University of Michigan Press,1969. |
| 11 | Rula A A, Nuttall C J. An analysis of ground mobility models (ANAMOB)[R]. Vicksburg: USA Army Corps of Engineers Waterways Experiment Station, 1971. |
| 12 | Rowland D. A review of vehicle design for soft ground operation[C]∥International Conference of the International Society for Terrain-Vehicle Systems, Vicksburg, USA, 1975:179-219. |
| 13 | Wong J Y. Terramechanics and off-road vehicles[R]. Amsterdam: Elsevier Science, 1989. |
| 14 | Wong J Y. Theory of Ground Vehicles[M]. New York: Wiley-Inter Science, 2001. |
| 15 | Lessem A, Mason G, Ahlvin R. Stochastic vehicle mobility forecasts using the NATO reference mobility model[J]. Journal of Terramechanics, 1996, 33(6): 273-280. |
| 16 | Zhou Q M, Liu X J. Analysis of errors of derived slope and aspect related to DEM data properties[J]. Journal of Computer & Geosciences, 2004, 30(4): 369-378. |
| 17 | Ishigami G, Kewlani G, Iagnemma K. Predictable mobility: a statistical approach for planetary surface exploration rovers in uncertain terrain[J]. IEEE Robotics & Automation Magazine, 2009, 16(9): 61-70. |
| 18 | Peynot T, Lui S, McAllister R, et al. Learned stochastic mobility prediction for planning with control uncertainty on unstructured terrain[J]. Journal of Field Robotics, 2014, 31(6): 969-995. |
| 19 | Gonzalez R, Jayakumar P, Iagnemma K. Stochastic mobility prediction of ground vehicles over large spatial regions: a geostatistical approach[J]. Auton Robot, 2017, 41(2): 311-331. |
| 20 | Gonzalez R, Jayakumar P, Iagnemma K. Generation of stochastic mobility maps for large-scale route planning of ground vehicles: a case study[J]. Journal of Terramechanic, 2017, 69(2): 1-11. |
| 21 | 李坤伟,游雄,张欣,等. 基于多源数据的土壤越野通行性评估[J]. 测绘科学技术学报, 2018, 35(2): 206-210. |
| Li Kun-wei, You Xiong, Zhang Xin, et al. Evaluation of soil trafficability based on multi-source data[J]. Journal of Geomatics Science and Technology, 2018, 35(2): 206-210. | |
| 22 | Ti K S, Huat B B K, Noorzaei J. A review of basic soil constitutive models for geotechnical application[J]. Electronic Journal of Geotechnical Engineering, 2009, 14(1):1-18. |
| 23 | Drucker P. Soil mechanics and plastic analysis for limit design[J]. Quarterly of Applied Mathematics, 1952, 10(2): 157-165. |
| 24 | Sandler I S, Rubin D. An algorithm and a modular subroutine for the cap model[J]. Journal for Numerical and Analytical Methods in Geomechanics, 1979, 3(2): 173-186. |
| 25 | Grujicic M, Bell W C, Arakere G, et al. Finite element analysis of the effect of up-armouring on the off-road braking and sharp-turn performance of a high-mobility multi-purpose wheeled vehicle[J]. Journal of Automobile Engineering, 2009, 223(11): 1419-1434. |
| 26 | Ragheb H, EI-Gindy M, Kishawy H A. Multi-wheeled combat vehicle modeling on rigid and soft terrain[C]∥NDIA Ground Vehicle Systems Engineering and Technology Symposum, Modeling & Simulation, Testing and Validation (MSTV), Michigan, USA, 2013: 325-336. |
| 27 | Shoop S A, Richmond P W, Lacombe J. Overview of cold regions mobility modeling at CRREL[J]. Journal of Terramechanics, 2006, 43(1): 1-26. |
| 28 | Wright A. Tire/soil interaction modelling withing a virtual proving ground environment[D]. Berkeley: Institute of Defence and Security, University of Cranfield, 2012. |
| 29 | Ravula P, Acar G, Balachandran B. Discrete element method-based studies on dynamic interactions of a lugged wheel with granular media[J]. Journal of Terramechanics, 2021, 94: 49-62. |
| 30 | 张锐,李建桥,李因武,等. 部件复杂表面影响土壤扰动行为的离散元宏细观分析[J]. 吉林大学学报: 工学版, 2009, 39(5): 1218-1223. |
| Zhang Rui, Li Jian-qiao, Li Yin-wu, et al. DEM macroscopic and mesoscopic analysis in disturbed behavior of soil acted by part with complex surface[J]. Journal of Jilin University(Engineering and Technology Edition), 2009, 39(5): 1218-1223. | |
| 31 | Dasch J, Jayakumar P, Bradbury M, et al. Next-generation NATO reference mobility model (NG-NRMM)[R]. Aarhus: the NATO Science & Technology Organization, 2020. |
| 32 | Melanz D, Jayakumar P, Negrut D. Experimental validation of a differential variational inequality-based approach for handling friction and contact in vehicle/granular-terrain interaction[J]. Journal of Terramechanics, 2016, 65: 1-13. |
| 33 | Tasora A, Magnoni D, Negrut D, et al. Deformable soil with adaptive level of detail for tracked and wheeled vehicles[J]. International Journal of Vehicle Performance, 2019, 5(1): 60-76. |
| 34 | Serban R, Taylor M, Negrut D, et al. Template-based ground vehicle modeling and simulation[J]. International Journal of Vehicle Performance, 2019, 5(1):2-17. |
| 35 | Recuero A, Serban R, Peterson B, et al. A high-finitely approach for vehicle mobility simulation: nonlinear finite element tires operating on granular material[J]. Journal of Terramechanics, 2017, 72: 39-54. |
| 36 | Cundall P A, Strack O D L. A discrete numerical model for granular assemblies[J]. Geotechnique, 1979, 29(1): 47-65. |
| 37 | Cundall P A. A computer model for simulating progressive large-scale movements in block rock mechanics[C]∥International Symposium on Visual Computing, Nevada, USA, 1971: 8-11. |
| 38 | Smith W, Peng H. Modeling of wheel-soil interaction over rough terrain using the discrete element method[J]. Journal of Terramechanics, 2013, 50(5/6): 277-287. |
| 39 | Negrut D, Melanz D, Mazhar H, et al. Investigating through simulation the mobility of light tracked vehicles operating on discrete granular terrain[J]. SAE International Journal of Passenger Cars-Mechanical Systems, 2013, 6(1): 369-381. |
| 40 | Wasfy T M, Wasfy H M, Peters J M. Coupled multibody dynamics and discrete element modeling of vehicle mobility on cohesive granular terrains[C]∥ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, New York, USA, 2014: 8-13. |
| 41 | Wasfy T M, Wasfy H M, Peters J M. High-fidelity multi-body dynamics vehicle model coupled with a cohesive soil discrete element model for predicting vehicle mobility[C]∥International Conference on Multi-body Systems, Boston, USA, 2015:202-208. |
| 42 | Wasfy T M, Jayakumar P, Mechergui D, et al. Prediction of vehicle mobility on large-scale soft-soil terrain maps using physics-based simulation[J]. International Journal of Vehicle Performance, 2018, 4(4): 347-381. |
| 43 | Akinci N, Cornelis J, Akinci G, et al. Coupling elastic solids with smoothed particle hydrodynamics fluids[J]. Computer Animation and Virtual Worlds, 2013, 24(3/4): 195-203. |
| 44 | Lescoe R, El-Gindy M, Koudela K, et al. Tire-soil modeling using finite element analysis and smooth particle hydrodynamics techniques[C]∥ASME 2010 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Montreal, Canada, 2010: 3-18. |
| 45 | Lescoe R, El-Gindy M, Koudela K,et al. Improvement of soil modeling in a tire-soil interaction using finite element analysis and smoothed particle hydrodynamics[J]. Mechanical Engineering, 2010(10): 3-18. |
| 46 | Sulsky D, Zhou S J, Schreyer H. Application of particle-in-cell method to solid mechanics[J]. Computer Physics Communications, 1996, 87(1/2): 236-252. |
| 47 | 王宇新, 顾元宪, 孙明. 无网格MPM法在冲击载荷问题中的应用[J]. 工程力学, 2006, 23(5): 46-51. |
| Wang Yu-xin, Gu Yuan-xian, Sun Ming. Application of material point method to shock load problems[J]. Engineering Mechanics, 2006, 23(5): 46-51. | |
| 48 | Stomakhin A, Schroedery C, Chai L, et al. A material point method for snow simulation[J]. ACM Transactions on Graphics, 2013, 32(4): 1-10. |
| 49 | Letherwood M, Gerth R, Jayakumar O, et al. Cooperative demonstration of technology next-generation NATO reference mobility model (NG-NRMM)[R]. Michigan: Collaboration Support Office Applied Vehicle Technology Pane, 2018. |
| 50 | Yamashita H, Chen G, Ruan Y, et al. Hierarchical multiscale modeling of tire-soil interaction for off-road mobility simulation[J]. ASME Journal of Computational Nonlinear Dynamics, 2019, 14(6): No. 061007. |
| 51 | Nishiyama K, Nakashima H, Shimizu H, et al. 2D FE-DEM analysis of contact stress and tractive performance of a tire driven on dry sand[J]. Journal of Terramechanics, 2017, 74(12): 25-33. |
| 52 | Nishiyama K, Kashima H, Shida T, et al. FE-DEM with interchangeable modeling for off-road tire traction analysis[J]. Journal of Terramechanics, 2018, 78: 15-25. |
| 53 | Guo N, Zhao J. A coupled FEM/DEM approach for hierarchical multiscale modeling of granular media[J]. International Journal for Numerical Methods in Engineering, 2014, 99(11): 789-818. |
| 54 | Liu Y, Sun W C, Yuan Z, et al. A nonlocal multiscale discrete-continuum model for predicting mechanical behavior of granular materials[J]. International Journal for Numerical Methods in Engineering, 2016, 106(2): 129-160. |
| 55 | Nakashima H, Oida A. Algorithm and implementation of soil-tire contact analysis code based on dynamic FE-DE method[J]. Journal of Terramechanics, 2004, 41(4): 127-137. |
| 56 | Mechergui D, Jayakumar P. Efficient generation of accurate mobility maps using machine learning algorithms[J]. Journal of Terramechanics, 2020, 88: 53-63. |
| 57 | Kirchdoerfer T, Ortiz M. Data-driven computational mechanics[J]. Computer Methods in Applied Mechanics and Engineering, 2016, 304: 81-101. |
| 58 | Ghaboussi J, Garrett J H, Wu X. Knowledge-based modeling of material behavior with neural networks[J]. Journal of Engineering Mechanics, 1991, 117(1): 132-153. |
| 59 | Ellis G W, Yao C, Zhao R, et al. Stress-strain modeling of sands using artificial neural networks[J]. Journal of Geotechnical and Geo-environmental Engineering, 1995, 121(5): 429-435. |
| 60 | Furukawa T, Yagawa G. Implicit constitutive modelling for vis-coplasticity using neural networks[J]. Journal of Engineering Mechanics, 1998, 43(2): 195-219. |
| 61 | Wang K, Sun W C. A multiscale multi-permeability poroplasticity model linked by recursive homogenizations and deep learning[J]. Computer Methods in Applied Mechanics and Engineering, 2018, 334: 337-380. |
| 62 | Leiter K W, Barnes B C, Becker R, et al. Accelerated scale-bridging through adaptive surrogate model evaluation[J]. Journal of Scientific Computing, 2018, 27: 91-106. |
| 63 | Yamashita H, Chen G C, Ruan Y F, et al. Parallelized multiscale off-road vehicle mobility aimulation algorithm and full-scale vehicle validation[J]. Journal of Computational and Nonlinear Dynamics, 2020, 15(9): No. 091007. |
| 64 | Chen G C, Yamashita H, Ruan Y F, et al. Enhancing hierarchical multiscale off-road mobility model by neural network surrogate model[J]. Journal of Computational and Nonlinear Dynamics, 2021, 16(8): No. 081005. |
| 65 | Tw A, Pj B. Next-generation NATO reference mobility model complex terramechanics: definition and literature review[J]. Journal of Terramechanics, 2021, 96: 45-57. |
| 66 | Priddy J D. Stochastic vehicle mobility forecasts using the NRMM[R]. Warren: US Army TARDEC, 1995. |
| 67 | Ma R, Chemistruck H, Ferris J B. State-of-the-art of terrain profile characterization models[J]. International Journal of Vehicle Design, 2013, 61(1): 285-304. |
| 68 | Vong T T, Haas G A, Henry C L. NATO reference mobility model (NRMM) modeling of the DEMO II experimental unmanned ground vehicle[R]. Nevada: Army Research Lab, 1999. |
| 69 | Willoughby W E, Jones R A, Mason G L, et al. Application of historical mobility testing to sensor-based robotic performance[J]. Society of Photo-Optical Instrumentation Engineers, 2006: 6230(4): 25-39. |
| 70 | Choi K K, Jayakumar P, Funk M, et al. Framework of reliability-based stochastic mobility map for next generation NATO reference mobility model[J]. Journal of Computational and Nonlinear Dynamics, 2020, 14(2): No. 021012. |
| 71 | Homer C, Dewitz J, Yang L M, et al. National land cover database for the conterminous United States representing a decade of land cover change information[J]. Photogrammetric Engineering and Remote Sensing, 2015, 81(5): 345-354. |
| 72 | Chemistruck H M, Ferris J B. Developing compact models of terrain surfaces[J]. Journal of Dynamic Systems, Measurement, and Control, 2013, 135(6): No. 061008. |
| 73 | Cressie N, Johannesson G. Fixed rank kriging for very large spatial data sets[J]. Journal of the Royal Statistical Society, 2008, 70(1): 209-226. |
| 74 | Hosseini S Z, Kappas M, Bodaghabadi M B, et al. Comparison of different geostatistical methods for soil mapping using remote sensing and environment variables in Poshtkouh rangelands, iran[J]. Polish Journal of Environmental Studies, 2014, 23(3): 737-751. |
| 75 | Yamashita H, Jayakumar P, Alsaleh M, et al. Physics-based deformable tire-soil interaction model for off-road mobility simulation and experimental validation[J]. Journal of Computational and Nonlinear Dynamics, 2018, 13(2):11-26. |
| 76 | Reid A A, Shoop S, Jones R, et al. High-fidelity ground platform and terrain mechanics modeling for military applications involving vehicle dynamics and mobility analysis[C]∥Asia-Pacific ISTVS Conference and Annual Meeting of Japanese Society for Terramechanics, Fairbanks, USA, 2007:23-26. |
| 77 | Raymond J B, Jayakumar P. The shearing edge of tracked vehicle-soil interactions in path clearing applications utilizing multi-body dynamics modeling & simulation[J]. Journal of Terramechanics, 2015, 58: 39-50. |
| 78 | 张滔, 戴瑜, 刘少军, 等. 深海履带式集矿机多体动力学建模与行走性能仿真分析[J]. 机械工程学报, 2015, 51(6): 173-180. |
| Zhang Tao, Dai Yu, Liu Shao-jun, et al. Multi-body dynamic modeling and mobility simulation analysis of deep ocean tracked miner[J]. Journal of Mechanical Engineering, 2015, 51(6): 173-180. | |
| 79 | Ma W B, Rao Q H, Feng K, et al. Experimental research on grouser traction of deep-sea mining machine[J]. Applied Mathematics and Mechanics, 2015, 36(9): 1243-1252. |
| 80 | Li J, Liu S, Dai Y. Effect of grouser height on tractive performance of tracked mining vehicle[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2017, 39(7): 2459-2466. |
| 81 | Xu F, Rao Q H, Ma W B. Turning traction force of tracked mining vehicle based on rheological property of deep-sea sediment[J]. Transactions of Nonferrous Metals Society of China, 2018, 28(6): 1233-1240. |
| 82 | Trease B, Arvidson R, Lindemann R, et al. Dynamic modeling and soil mechanics for path planning of the Mars exploration rovers[C]∥ASME International Design Engineering Technical Conferences, Washington DC, USA, 2011: 755-765. |
| 83 | Ghotbi B, Gonzalez F, Jozsef Kovecses J, et al. Mobility evaluation of wheeled robots on soft terrain[J]. Mechanism and Machine Theory, 2016, 100: 259-282. |
| 84 | 王宪良,王庆杰,李洪文,等. 农业机械土壤压实研究方法现状[J]. 热带农业科学, 2015, 35(6): 72-76. |
| Wang Xian-liang, Wang Qing-jie, Li Hong-wen, et al. Current research status of soil compaction by agriculture machinery[J]. Chinese Journal of Tropical Agriculture, 2015, 35(6): 72-76. | |
| 85 | 杨晓娟, 李春俭. 机械压实对土壤质量、作物生长、土壤生物及环境的影响[J]. 中国农业科学, 2008, 48(7): 2008-2015. |
| Yang Xiao-juan, Li Chun-jian. Impacts of mechanical compaction on soil properties, growth of crops, soil-borne organisms and environment[J]. Scientia Agricultura Sinica, 2008, 48(7): 2008-2015. | |
| 86 | Keller T, Arvidsson J. A model for prediction of vertical stress distribution near the soil surface below rubber-tracked under carriage systems fitted on agricultural vehicles[J]. Soil and Tillage Research, 2016, 155: 116-123. |
| 87 | 丁肇,李耀明,唐忠. 轮式和履带式车辆行走对农田土壤的压实作用分析[J].农业工程学报, 2020, 36(5): 10-18. |
| Ding Zhao, Li Yao-ming, Tang Zhong. Compaction effects of wheeled vehicles and tracked on farmland soil[J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(5): 10-18. | |
| 88 | 王亮,戴宪彪,居鹤华. 一种基于单应的月球车车轮沉陷视觉测量方法[J]. 宇航学报, 2011, 32(8): 1701-1707. |
| Wang Liang, Dai Xian-biao, Ju He-hua. Homography based visual measurement of wheel sinkage for a lunar rover[J]. Journal of Astronautics, 2011, 32(8): 1701-1707. | |
| 89 | Hegde G M, Ye C, Robinson C A, et al. Computer-vision-based wheel sinkage estimation for robot navigation on lunar terrain[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(4): 1346-1356. |
| 90 | Shirai T, Ishigami G. Development of in-wheel sensor system for accurate measurement of wheel terrain interaction characteristics[J]. Journal of Terramechanics, 2015, 62: 51-61. |
| 91 | Goldberg S, Maimone M, Matthies L. Stereo vision and rover navigation software for planetary exploration[C]∥Proceedings, IEEE Aerospace Conference, Big Sky, MT, USA, 2002: 25-36. |
| 92 | Thrun S, Montemerlo M, Aron A. Probabilistic terrain analysis for high speed desert driving[C]∥Robotics: Science & Systems, Pennsylvania, USA, 2006: 16-19. |
| 93 | Loh J. Speed map for autonomous rovers over rough terrain[D]. Santa Cruz: School of Engineering, University of California, 2012. |
| 94 | Durst P J, Goodin C T, Anderson D T, et al. A reference autonomous mobility model[C]∥Winter Simulation Conference, Las Vegas, NV, USA, 2017: 4026-4037. |
| 95 | Durst P J, Goodin C. High fidelity modelling and simulation of inertial sensors commonly used by autonomous mobile robots[J]. World Journal of Modelling and Simulation, 2012, 8(3): 172-184. |
| [1] | 李杰,陈涛,郭文翠,赵旗. 汽车非平稳随机振动空间域虚拟激励法及应用[J]. 吉林大学学报(工学版), 2022, 52(4): 738-744. |
| [2] | 李伟,宋海生,陆浩宇,史文库,王强,王晓俊. 复合材料板簧迟滞特性线性辨识方法[J]. 吉林大学学报(工学版), 2022, 52(4): 829-836. |
| [3] | 庄蔚敏,陈沈,吴迪. 碳纤维增强复合材料包裹强化形式对钢管横向冲击性能的影响[J]. 吉林大学学报(工学版), 2022, 52(4): 819-828. |
| [4] | 史文库,张曙光,张友坤,陈志勇,江逸飞,林彬斌. 基于改进海鸥算法的磁流变减振器模型辨识[J]. 吉林大学学报(工学版), 2022, 52(4): 764-772. |
| [5] | 张英朝,李昀航,郭子瑜,王国华,张喆,苏畅. 长头重型卡车气动减阻优化[J]. 吉林大学学报(工学版), 2022, 52(4): 745-753. |
| [6] | 薛龙,姚猛,李立犇,李因武,邓湘金,李建桥,邹猛. 基于触月压痕的表层月壤力学状态试验分析[J]. 吉林大学学报(工学版), 2022, 52(3): 497-503. |
| [7] | 段亮,宋春元,刘超,魏苇,吕成吉. 基于机器学习的高速列车轴承温度状态识别[J]. 吉林大学学报(工学版), 2022, 52(1): 53-62. |
| [8] | 庄蔚敏,陈沈,王楠. 温度对车身钢铝胶铆连接结构热应力变化的影响[J]. 吉林大学学报(工学版), 2022, 52(1): 70-78. |
| [9] | 陈剑斌,周宋泽,费峰永,陈永龙,凌国平. 过盈量及滚花方式对装配式凸轮轴压装失效的影响[J]. 吉林大学学报(工学版), 2021, 51(6): 1959-1966. |
| [10] | 胡兴军,张靖龙,罗雨霏,辛俐,李胜,胡金蕊,兰巍. 冷却管结构及进气方向对空冷中冷器性能的影响[J]. 吉林大学学报(工学版), 2021, 51(6): 1933-1942. |
| [11] | 商拥辉,徐林荣,刘维正,蔡雨. 重载铁路改良土和A组填料过渡段的动力特性[J]. 吉林大学学报(工学版), 2021, 51(6): 2128-2136. |
| [12] | 罗勇,韦永恒,黄欢,肖人杰,任淋,崔环宇. 驾驶员意图识别的P2.5插混构型双离合器起步控制[J]. 吉林大学学报(工学版), 2021, 51(5): 1575-1582. |
| [13] | 曾小华,宋美洁,宋大凤,王越. 基于车联网信息的公交客车行驶工况数据处理方法[J]. 吉林大学学报(工学版), 2021, 51(5): 1692-1699. |
| [14] | 马超,高云凯,刘哲,段月星,田林雳. 骨架式车身多材料及梁截面形状和尺寸优化[J]. 吉林大学学报(工学版), 2021, 51(5): 1583-1592. |
| [15] | 兰凤崇,李继文,陈吉清. 面向动态场景复合深度学习与并行计算的DG-SLAM算法[J]. 吉林大学学报(工学版), 2021, 51(4): 1437-1446. |
|
||