吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (9): 2474-2482.doi: 10.13229/j.cnki.jdxbgxb.20211193
基于车辙图像的CE-4月球车挂钩牵引力判别
胡震宇1,2( ),申彦2,3,王卫军1,2,罗小桃1,2,邹猛2,3()
),申彦2,3,王卫军1,2,罗小桃1,2,邹猛2,3()
- 1.上海航天系统工程研究所,上海 201109
2.行星地面力学与工程仿生联合实验室,上海 201109
3.吉林大学 工程仿生教育部重点实验室,长春 130022
Analysis of drawbar pull to CE⁃4 Lunar rover based on rutting image of wheel
Zhen-yu HU1,2(),Yan SHEN2,3,Wei-jun WANG1,2,Xiao-tao LUO1,2,Meng ZOU2,3()
- 1.Shanghai Aerospace System Engineering Institute,Shanghai 201109,China
2.Joint Lab for Planetary Terramechanics and Bionics Engineering,Shanghai 201109,China
3.Key Laboratory of Bionics Engineering,Ministry of Education,Jilin University,Changchun 130022,China
摘要:
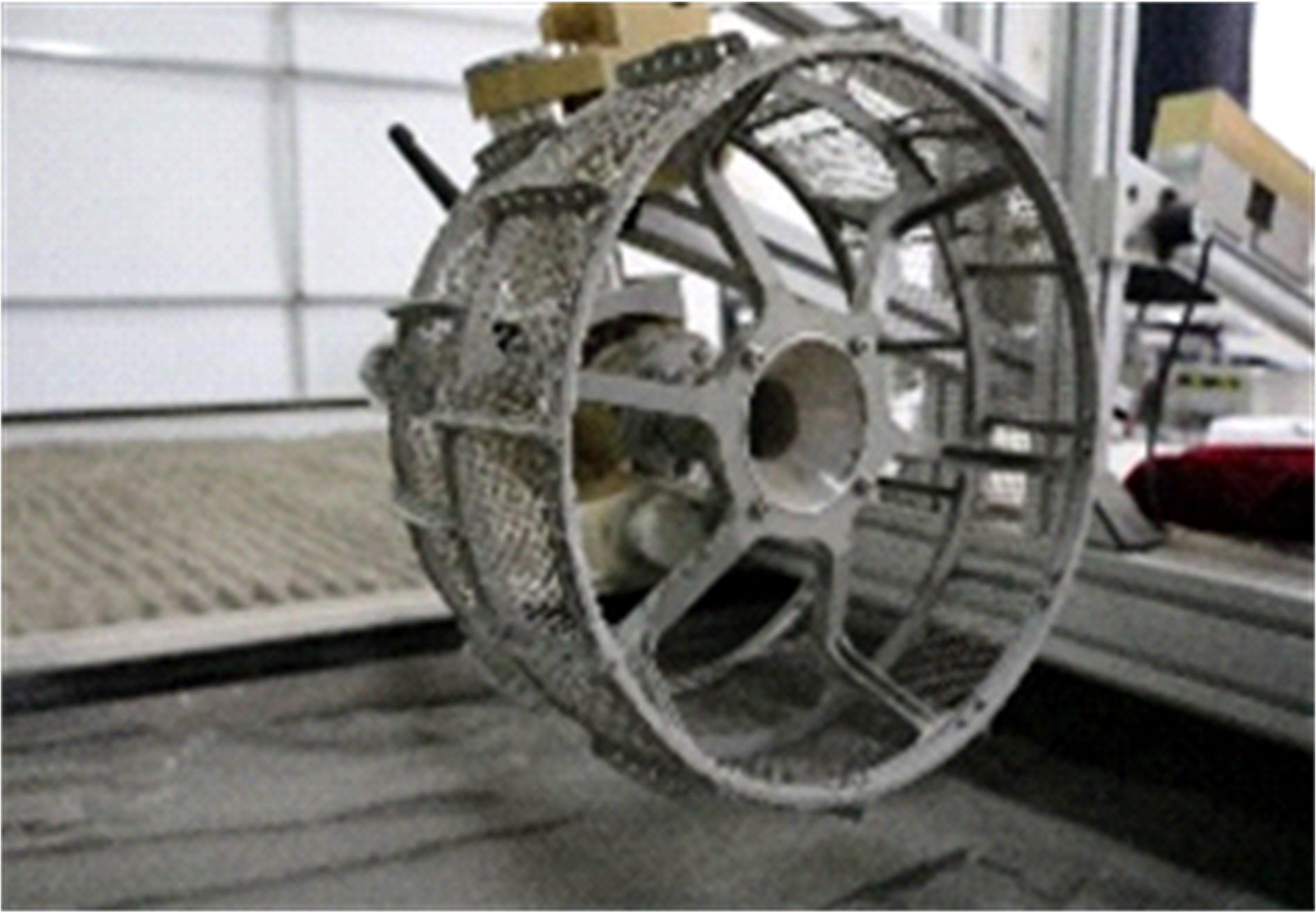
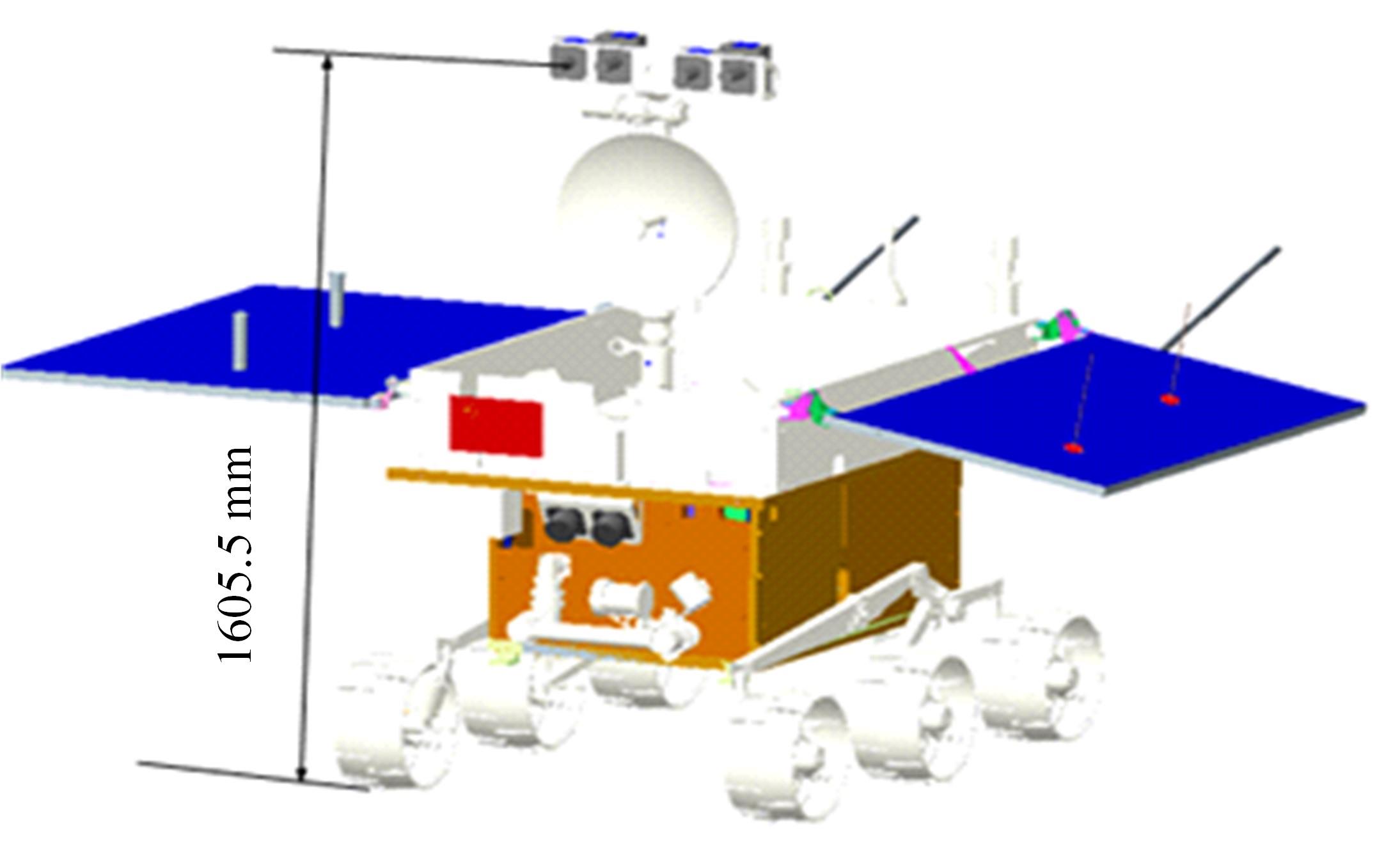
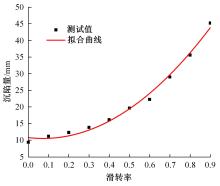
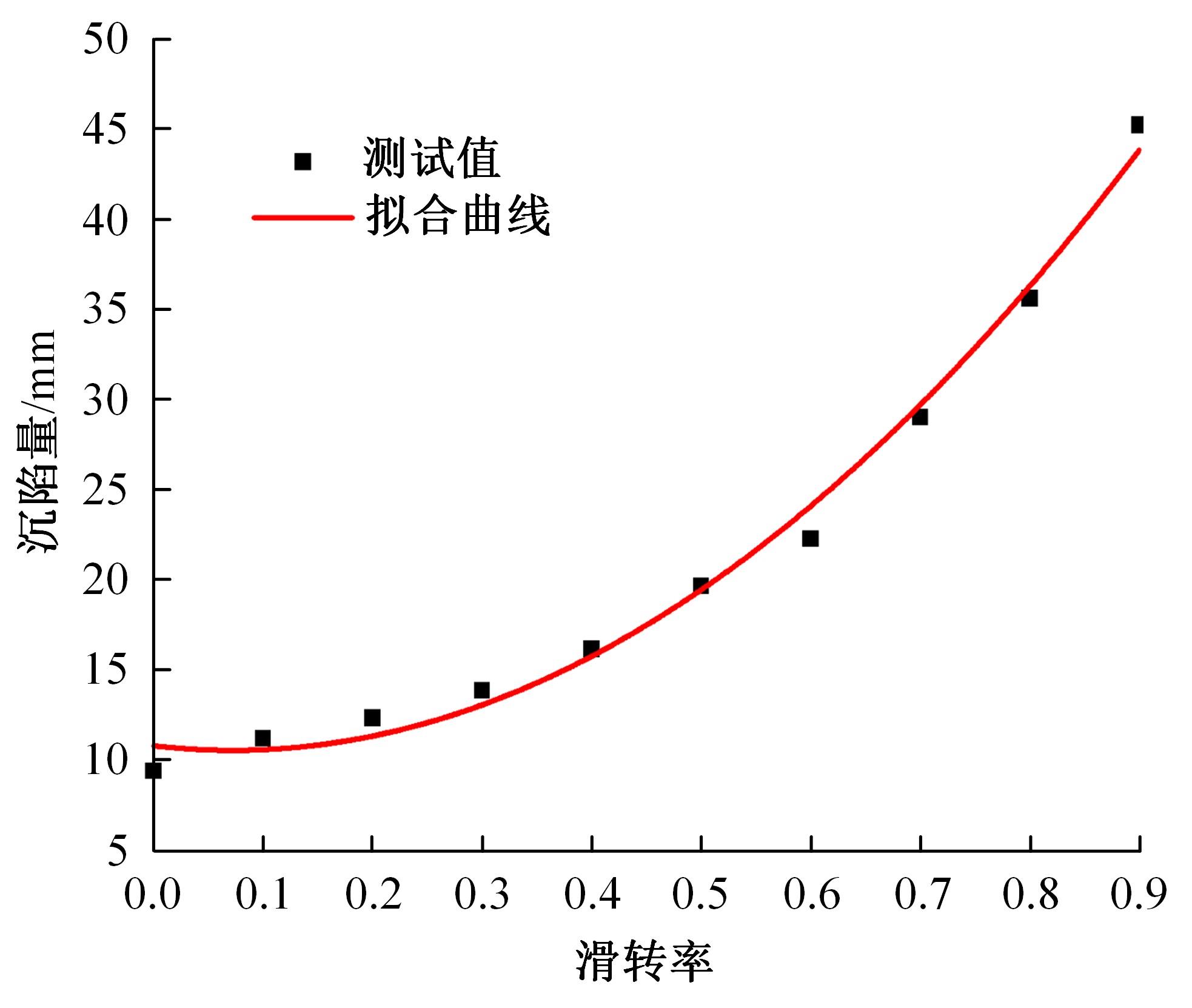
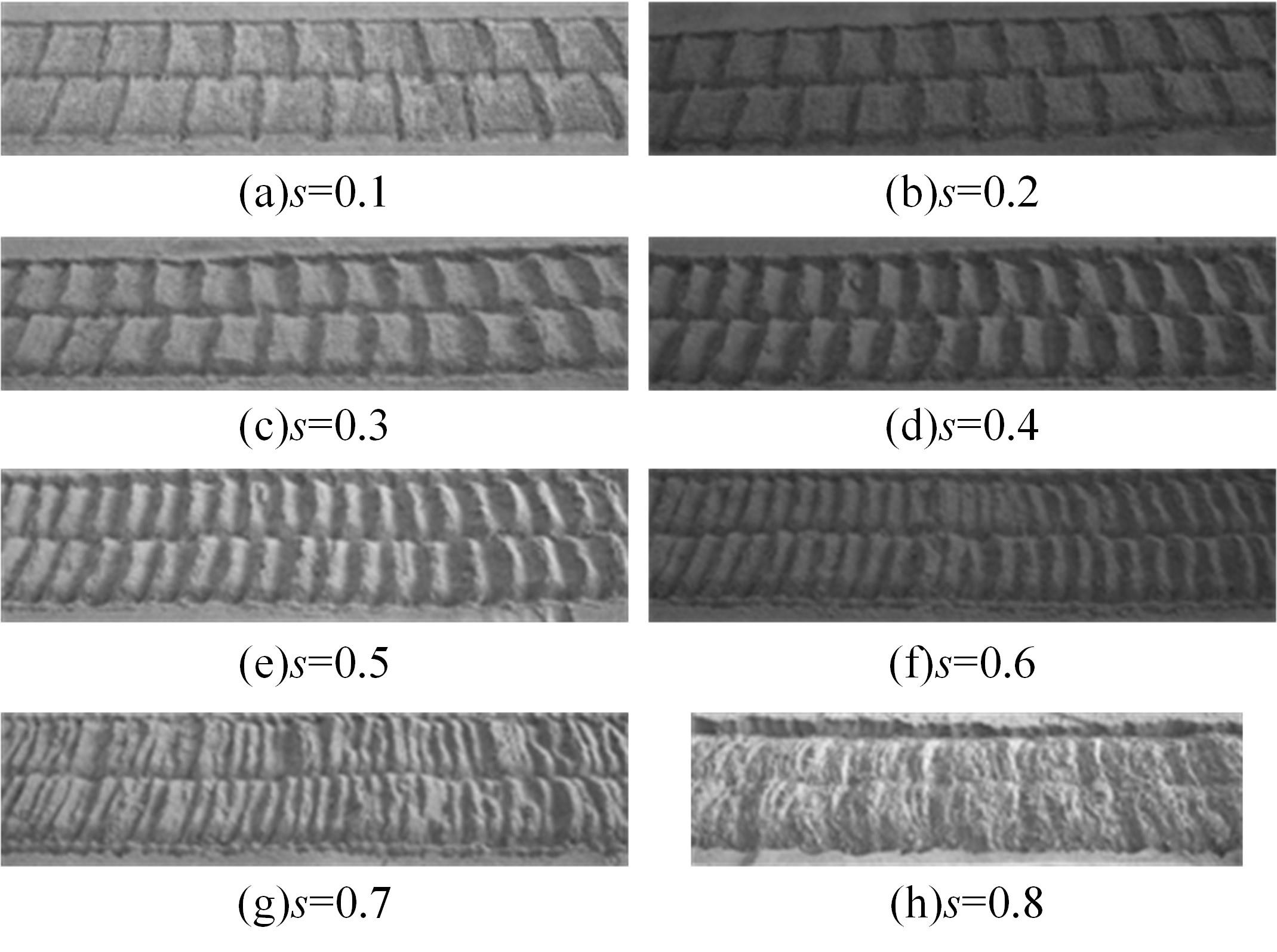
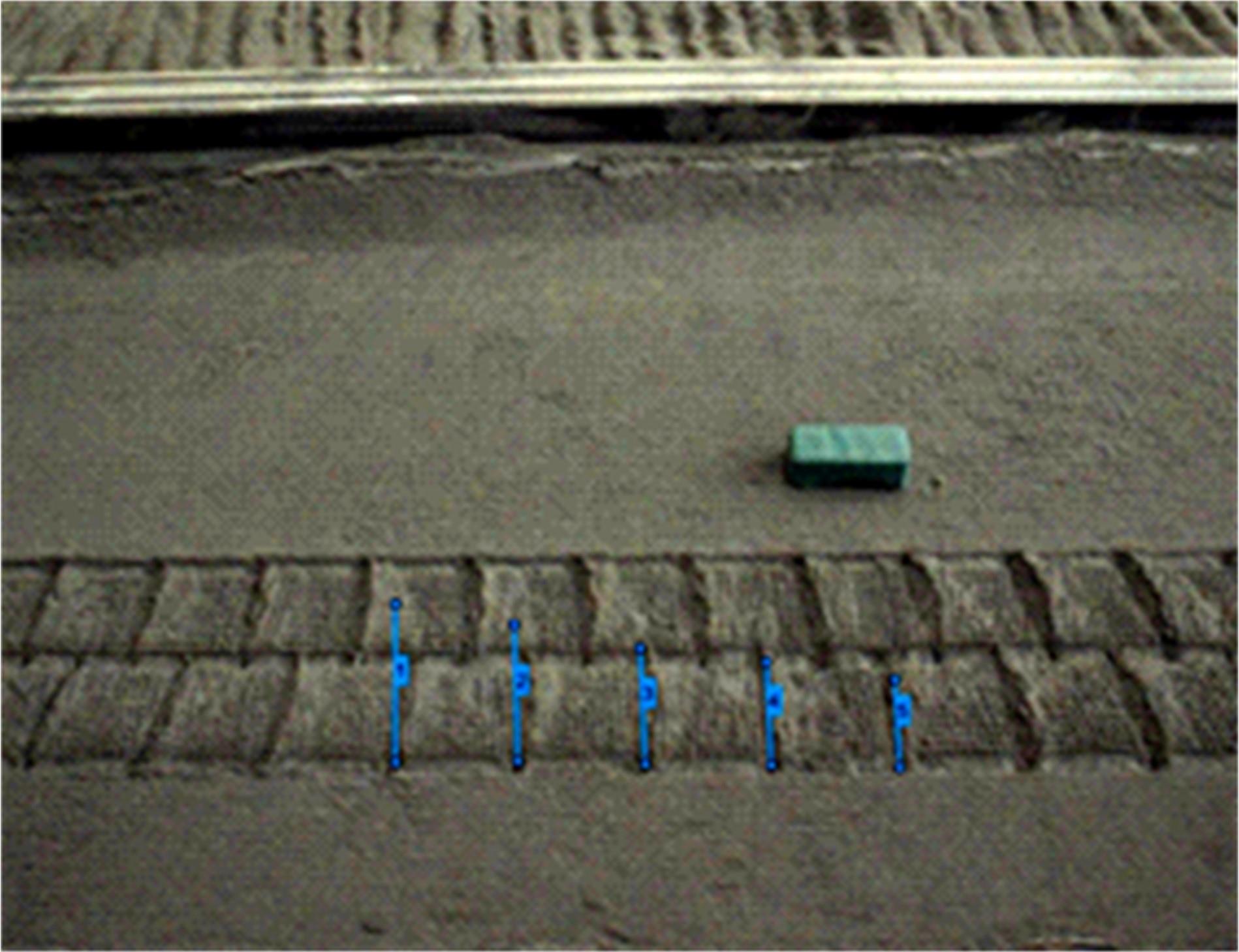
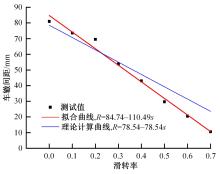
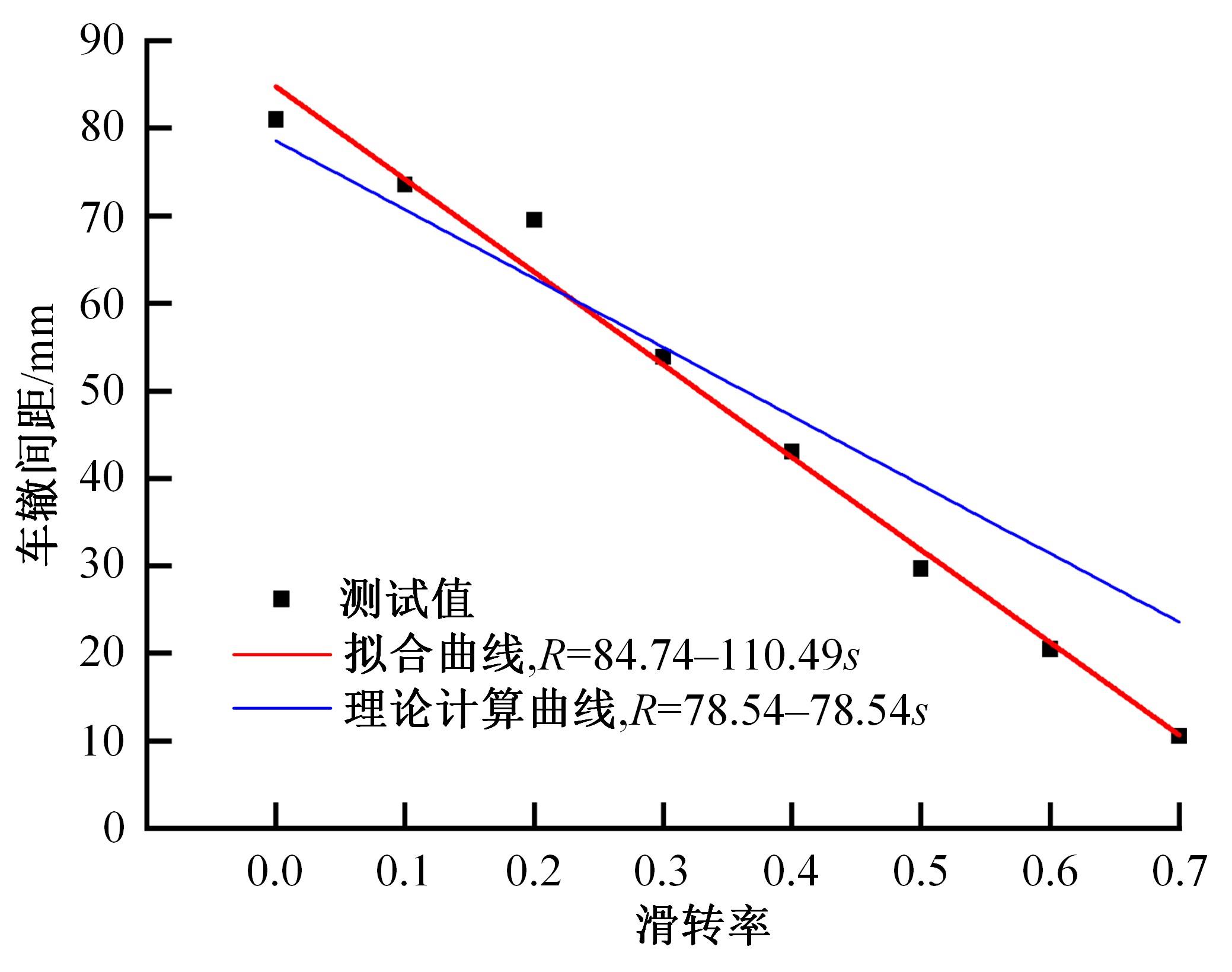
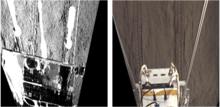
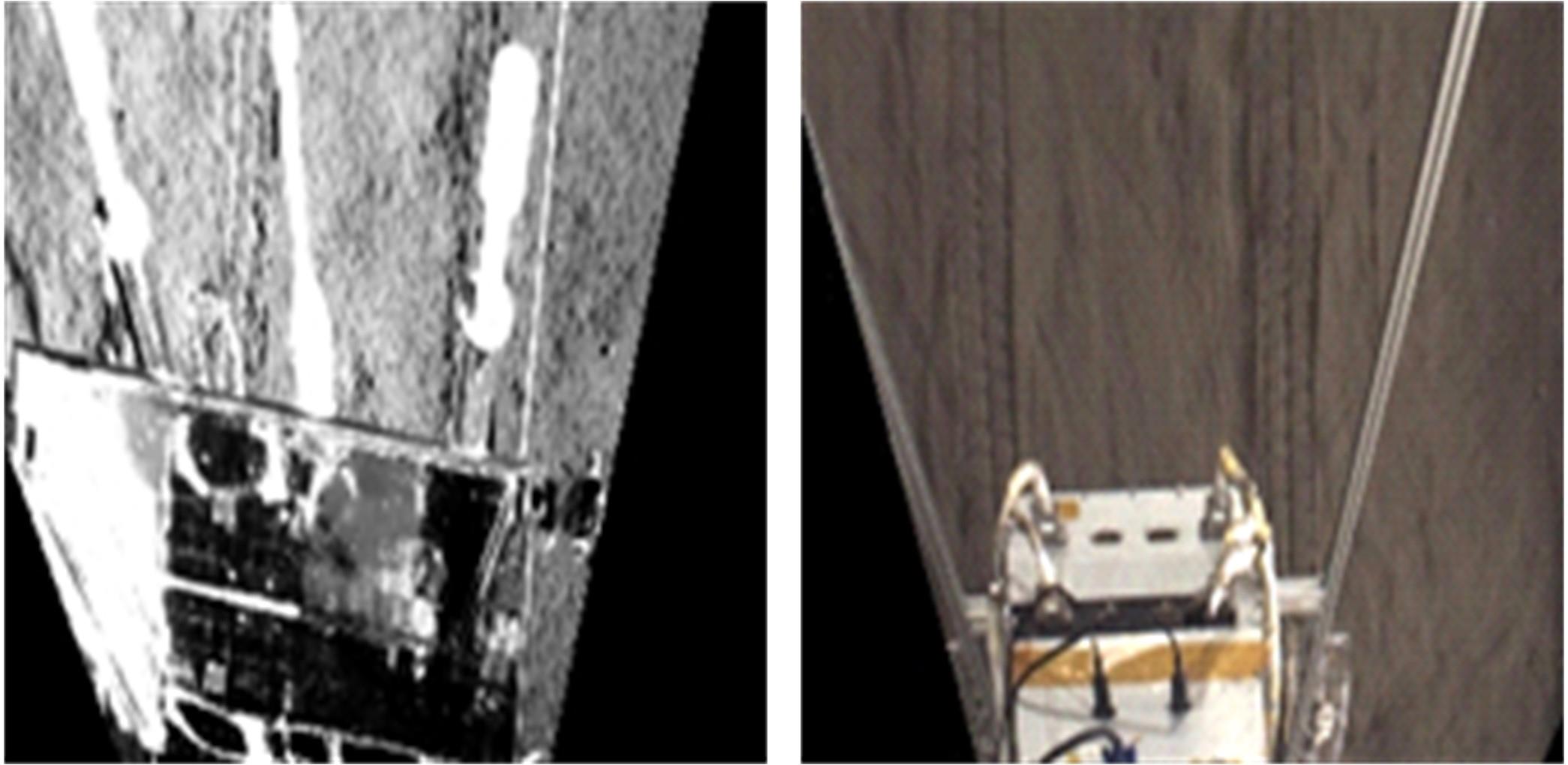
为评估玉兔2号月球车月面行驶状态,提出了一种基于滑转率信息的月球车挂钩牵引力评价方法。该方法以玉兔2号月球车车轮与其地面原型车为试验对象,通过整车试验和土槽试验模拟玉兔2号月球行驶状态,以车辙信息、滑转率、轮上载荷作为输入参数,建立了沉陷量-滑转率、车辙间距-滑转率标定模型,并基于Matlab图像处理对滑转率进行识别。结果表明,玉兔2号月球车在月面特定区域D'、A、B'点行驶时的滑转率分别为10.45%、12.96%、19.70%,挂钩牵引力分别为177.03、181.62、194.47 N。地面试验和反演计算结果表明,玉兔2月球车在以上区域行驶状态良好。
中图分类号:
- TU411






| 1 | Cherkasov I I, Shvarev V V. Soviet investigations of the mechanics of lunar soils[J]. Soil Mechanics and Foundation Engineering, 1973, 10(4): 252-256. |
| 2 | Leonovich A K, Gromon V V, Rybakov A V, et al. Studies for lunar ground mechanical properties with the self-propelled lunokhod-l[R]. Moscow: Peredvizhnaya Laboratoriya na Luna-Lunokhod-1, 1971: 120-135. |
| 3 | Leonovich A K, Gromov V V, Rybakov A V, et al. Investigations of the mechanical properties of the lunar soil along the path of Lunokhod-1[R]. Berlin: COSPAR space research Ⅻ, 1972: 53-54. |
| 4 | Zacny K, Wilson J, Craft J, et al. Robotic Lunar Geotechnical Tool[M]. Honolulu: Earth and Space, 2010. |
| 5 | 韩鸿硕, 陈杰. 21世纪国外深空探测发展计划及进展[J]. 航天器工程, 2008, 17(3): 1-22. |
| Han Hong-shuo, Chen Jie. 21st century foreign deep space exploration development plans and their progresses[J]. Spacecraft Engineering, 2008, 17(3): 1-22. | |
| 6 | 崔平远, 徐瑞, 朱圣英, 等. 深空探测器自主技术发展现状与趋势[J]. 航空学报, 2014, 35(1): 13-28. |
| Cui Ping-yuan, Xu Rui, Zhu Sheng-ying, et al. State of the art and developement trends of on-board autonomy technology for deep space explore[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(1): 13-28. | |
| 7 | 解杨敏, 季力, 魏祥泉, 等. 国内外行星表面巡视器自主导航技术研究[J]. 上海航天, 2021, 38(1): 61-71. |
| Xie Yang-min, Ji Li, Wei Xiang-quan, et al. Domestic and overseas research status on autonomous navigation technology of planetary rovers[J]. Aerospace Shanghai, 2021, 38(1): 61-71. | |
| 8 | Team R. Characterization of the martian surface deposits by the Mars pathfinder rover, sojourner[J]. Science, 1997, 278(5344): 1765-1768. |
| 9 | Moore H J, Bickler D B, Crisp J A, et al. Soil-like deposits observed by Sojourner, the pathfinder rover[J]. Journal of Geophysical Research Planets, 1999, 104(E4): 8729-8746. |
| 10 | Sullivan R, Anderson R, Biesiadecki J, et al. Cohesions, friction angles, and other physical properties of martian regolith from mars exploration rover wheel trenches and wheel scuffs[J/OL]. [2021-11-02]. |
| 11 | Arvidson R E, Anderson R C, Bartlett P, et al. Localization and physical properties experiments conducted by Spirit at Gusev crater[J]. Science, 2004, 305(5685): 821-824. |
| 12 | Arvidson R E, Bonitz R G, Robinson M L, et al. Results from the mars phoenix lander robotic arm experiment[J/OL]. [2021-11-03]. |
| 13 | Ono M, Fuchs T J, Steffy A, et al. Risk-aware planetary rover operation: autonomous terrain classification and path planning[C]∥2015 IEEE Aerospace Conference, Monoana, USA, 2015: 1-10. |
| 14 | Huang G. Visual-inertial navigation: a concise review[C]∥2019 International Conference on Robotics and Automation (ICRA), Monertal, Canada, 2019: 9572-9582. |
| 15 | Iagnemma K, Kang S, Brooks C, et al. Multi-sensor terrain estimation for planetary rovers[C]∥Proceedings of the 8th International Symposium on Artificial Intelligence, Robotics, and Automation in Space, NARA, Japan, 2003: No.12273618. |
| 16 | Reina G, Ojeda L, Milella A, et al. Wheel slippage and sinkage detection for planetary rovers[J]. IEEE/ASME Transactions on Mechatronics, 2006, 11(2): 185-195. |
| 17 | Cross M, Ellery A, Qadi A. Estimating terrain parameters for a rigid wheeled rover using neural networks[J]. Journal of Terramechanics, 2013, 50(3): 165-174. |
| 18 | 崔平远, 刘冰, 居鹤华. 月壤力学参数在线估计算法研究[J]. 计算机测量与控制, 2008, 16(2): 245-269. |
| Cui Ping-yuan, Liu Bing, Ju He-hua. Research on mechanical parameters online estimation of lunar soil[J]. Computer Measurement&Control, 2008, 16(2): 245-269. | |
| 19 | 李萌, 高峰, 孙鹏, 等. 月壤力学参数反求及试验验证[J]. 北京航空航天大学学报, 2011, 37(9): 1081-1805. |
| Li Meng, Gao Feng, Sun Peng, et al. Mechanical parameters reverse estimation of lunar soil and experimental verification[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(9): 1081-1805. | |
| 20 | 薛龙, 邹猛, 李建桥, 等. 基于轮地作用参数和PLSDA方法的月壤力学性能评估[J]. 航空学报, 2015, 36(11): 3751-3758. |
| Xue Long, Zou Meng, Li Jian-qiao, et al. Mechanical performance estimation of lunar soil using wheel-soil interaction parameter and PLSDA[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(11): 3751-3758. | |
| 21 | Ding L, Gao H, Deng Z, et al. Slip ratio for lugged wheel of planetary rover in deformable soil: definition and estimation[C]∥2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, ST.Louis, USA, 2009: 3343-3348. |
| 22 | 丁亮, 高海波, 邓宗全, 等. 基于应力分布的月球车轮地相互作用地面力学模型[J]. 机械工程学报, 2009, 45(7): 49-55. |
| Ding Liang, Gao Hai-bo, Deng Zong-quan, et al. Terramechanics model for wheel-terrain interaction of lunar rover based on stress distribution[J]. Journal of Mechanical Engineering, 2009, 45(7): 49-55. | |
| 23 | 李楠, 丁亮, 高海波, 等. 基于视觉检测技术的星球探测车车轮滑转率检测方法[C]∥第三十二届中国控制会议, 西安, 2013: 3673-3679. |
| 24 | 李楠, 高海波, 吕凤天, 等. 车辙图像频域分析及星球车车轮滑转率估计方法[J]. 宇航学报, 2016, 37(11): 1356-1364. |
| LI Nan, Gao Hai-bo, Lv Feng-tian, et al. Wheel trace imprint image frequency domain analysis and rover wheel slip ratio estimation[J]. Journal of Astronautics, 2016, 37(11): 1356-1364. | |
| 25 | 黄晗, 许述财, 张金换, 等. 基于轮辙非接触测量的月壤非参数化识别方法[J]. 吉林大学学报:工学版, 2019, 49(2): 366-374. |
| Huang Han, Xu Shu-cai, Zhang Jin-huan, et al. Non-parametric identification method for lunar regolith based on rut non-contact measurement[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(2): 366-374. | |
| 26 | 黄晗, 李建桥, 陈百超, 等. 基于地面力学的筛网轮牵引通过性研究[J]. 农业机械学报, 2016, 47(): 464-470. |
| Huang Han, Li Jian-qiao, Chen Bai-chao, et al. Traction trafficability of wire mesh wheel based on terramechanics[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(Sup.1): 464-470. | |
| 27 | 陈百超, 邹猛, 党兆龙, 等. CE-3月球车筛网轮月面沉陷行为试验[J]. 吉林大学学报: 工学版, 2019, 49(6): 1836-1843. |
| Chen Bai-chao, Zou Meng, Dang Zhao-long, et al. Experiment on preasure-sinkage for mesh wheels of CE-3 lunar rover on lunar regolith[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 1836-1843. | |
| 28 | 李建桥, 黄晗, 党兆龙, 等. 轻载荷条件下的筛网轮沉陷[J]. 吉林大学学报: 工学版, 2015, 45(1):167-173. |
| Li Jian-qiao, Huang Han, Dang Zhao-long, et al. Sinkage of wire mesh wheel under light load[J]. Journal of Jilin University(Engineering and Technology Edition), 2015,45(1):167-173. | |
| 29 | 黄晗. 深空探测车辆筛网轮牵引通过性研究[D]. 长春: 吉林大学生物与农业工程学院, 2017. |
| Huang Han. Study on traction trafficability for wire mesh wheel of planetary exploration rovers[D]. Changchun: College of Biological and Agricultural Engineering, Jilin University, 2017. | |
| 30 | Bekker M G. Theory of Land Locomotion[M]. Ann Arbor: University of Michigan Press, 1956. |
| [1] | 田野,李楠楠,刘君巍,姜生元,王储,张伟伟. 基于支持向量机的模拟月壤临界尺度颗粒切削负载识别[J]. 吉林大学学报(工学版), 2023, 53(7): 2143-2151. |
| [2] | 华琛,牛润新,余彪. 地面车辆机动性评估方法与应用[J]. 吉林大学学报(工学版), 2022, 52(6): 1229-1244. |
| [3] | 夏全平,高江平,罗浩原,张其功,李志杰,杨飞. 用于高模量沥青砼的复合改性硬质沥青低温性能[J]. 吉林大学学报(工学版), 2022, 52(3): 541-549. |
| [4] | 薛龙,姚猛,李立犇,李因武,邓湘金,李建桥,邹猛. 基于触月压痕的表层月壤力学状态试验分析[J]. 吉林大学学报(工学版), 2022, 52(3): 497-503. |
| [5] | 王康,姚猛,李立犇,李建桥,邓湘金,邹猛,薛龙. 基于月面表取采样触月压痕的月壤力学状态分析[J]. 吉林大学学报(工学版), 2021, 51(3): 1146-1152. |
| [6] | 陈国迎,姚军,王鹏,夏其坤. 适用于后轮轮毂驱动车辆的稳定性控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 397-405. |
| [7] | 陈百超,邹猛,党兆龙,黄晗,贾阳,石睿杨,李建桥. CE-3月球车筛网轮月面沉陷行为试验[J]. 吉林大学学报(工学版), 2019, 49(6): 1836-1843. |
| [8] | 李伊,刘黎萍,孙立军. 沥青面层不同深度车辙等效温度预估模型[J]. 吉林大学学报(工学版), 2018, 48(6): 1703-1711. |
| [9] | 黄晗, 李建桥, 陈百超, 吴宝广, 邹猛. 着陆器足垫冲击特性模型试验[J]. 吉林大学学报(工学版), 2017, 47(4): 1194-1200. |
| [10] | 崔金生, 侯绪研, 邓宗全, 潘万竞, 姜生元. 真空颗粒系统有效导热系数测量试验台研制及试验[J]. 吉林大学学报(工学版), 2016, 46(2): 457-464. |
| [11] | 李建桥,黄晗,党兆龙,邹猛,王洋. 轻载荷条件下的筛网轮沉陷[J]. 吉林大学学报(工学版), 2015, 45(1): 167-173. |
| [12] | 王国富, 高峰, 徐国艳. 转向盘式全方位六足机器人运动分析及控制[J]. , 2012, 42(04): 1008-1014. |
| [13] | 王孝兰, 王荣本. 基于刚柔耦合模型的月球车振动特性仿真[J]. 吉林大学学报(工学版), 2012, 42(02): 279-284. |
| [14] | 曹凤萍1,2,王荣本2. 基于立体视觉的月球车运动估计算法[J]. 吉林大学学报(工学版), 2011, 41(6): 1592-1597. |
| [15] | 葛平淑, 王荣本, 郭烈. 基于模糊逻辑的六轮月球车路径跟踪控制[J]. 吉林大学学报(工学版), 2011, 41(02): 503-0508. |
|