吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (3): 934-942.doi: 10.13229/j.cnki.jdxbgxb20170822
基于三步法的汽车主动四轮转向控制
于树友1,2( ),谭雷2,王伍洋2,陈虹1,2
),谭雷2,王伍洋2,陈虹1,2
- 1. 吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2. 吉林大学 通信工程学院,长春 130012
Control of active four wheel steering vehicle based ontriple⁃step method
Shu⁃you YU1,2(),Lei TAN2,Wu⁃yang WANG2,Hong CHEN1,2
- 1. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022, China
2. College of Communication Engineering, Jilin University, Changchun 130012, China
摘要:
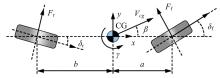
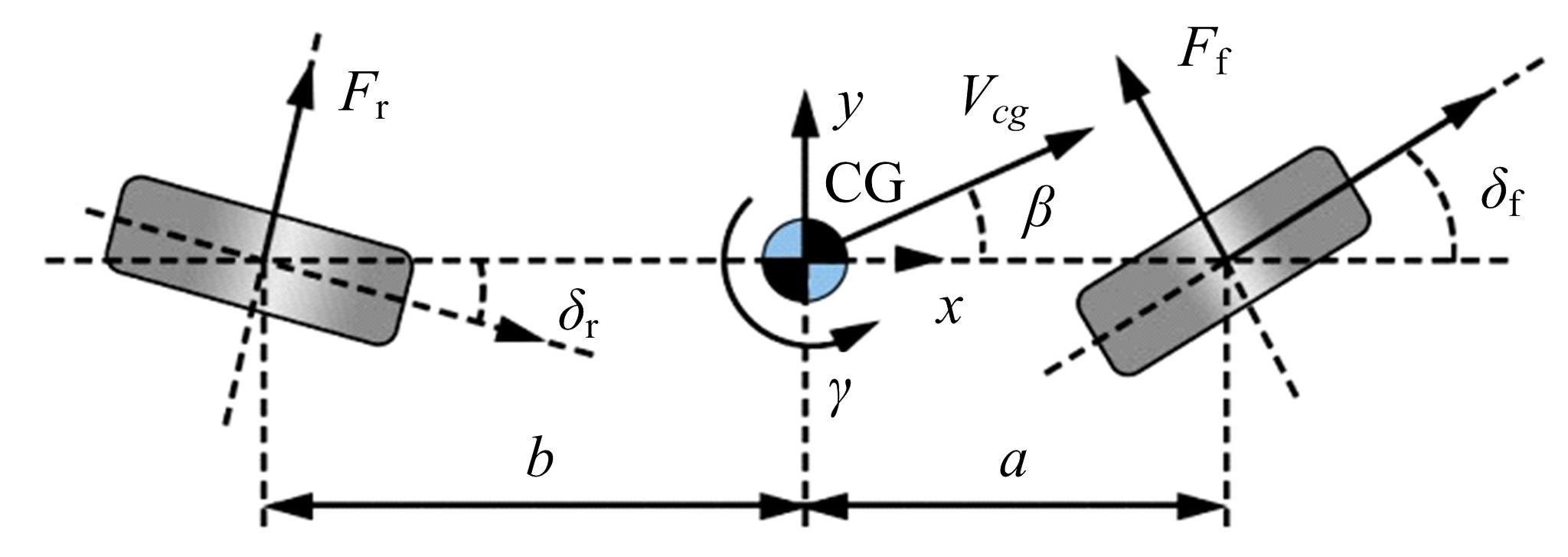
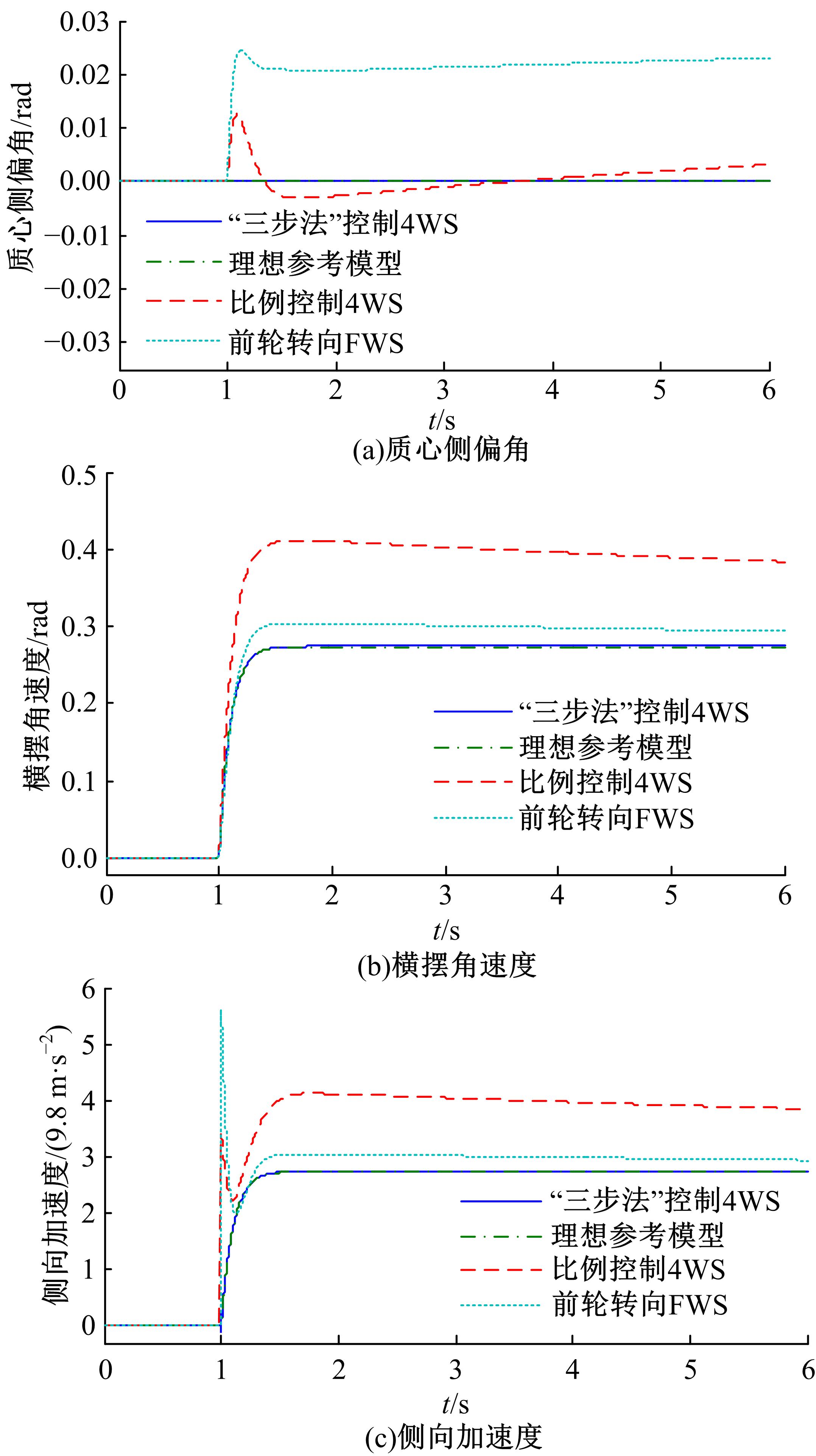
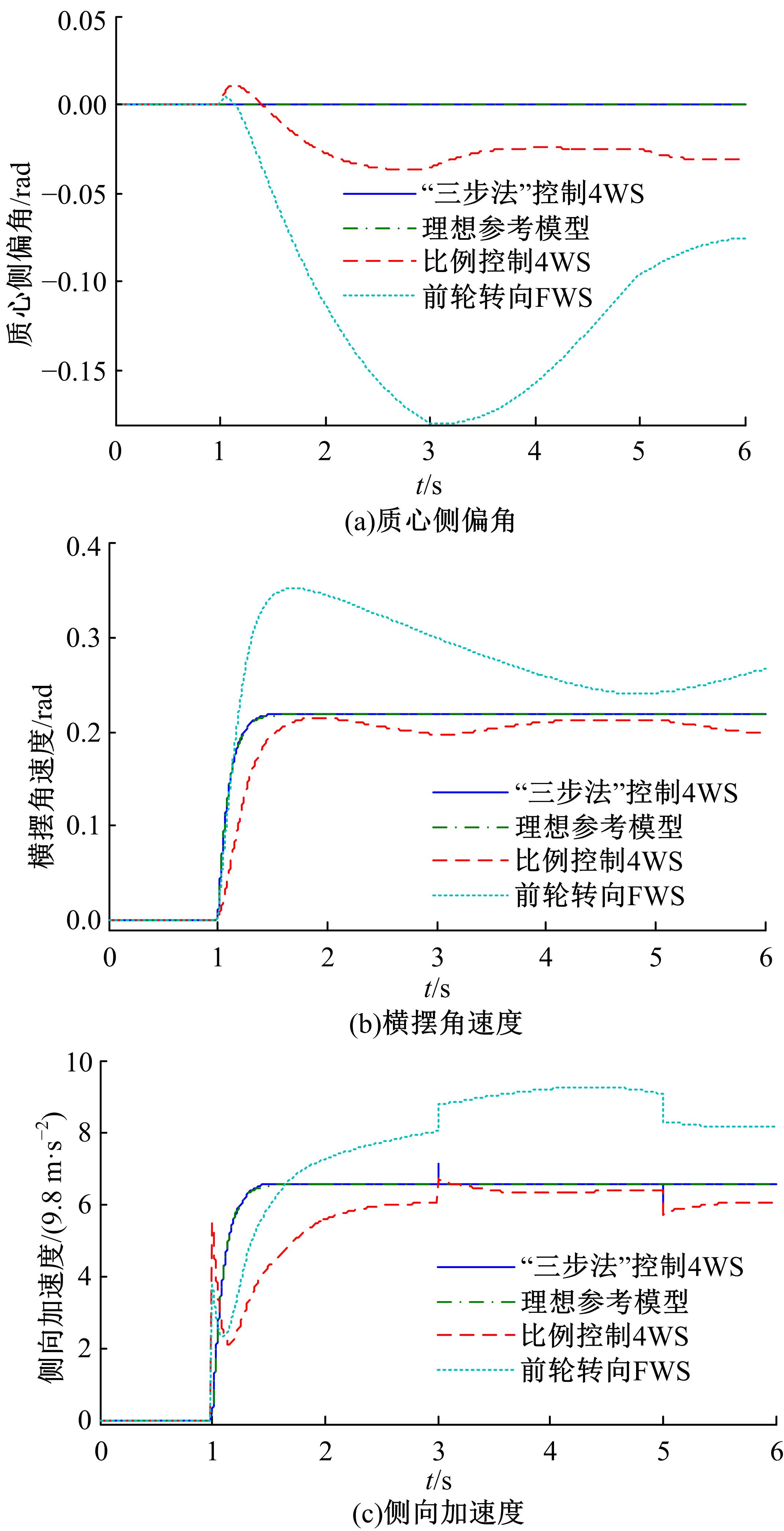
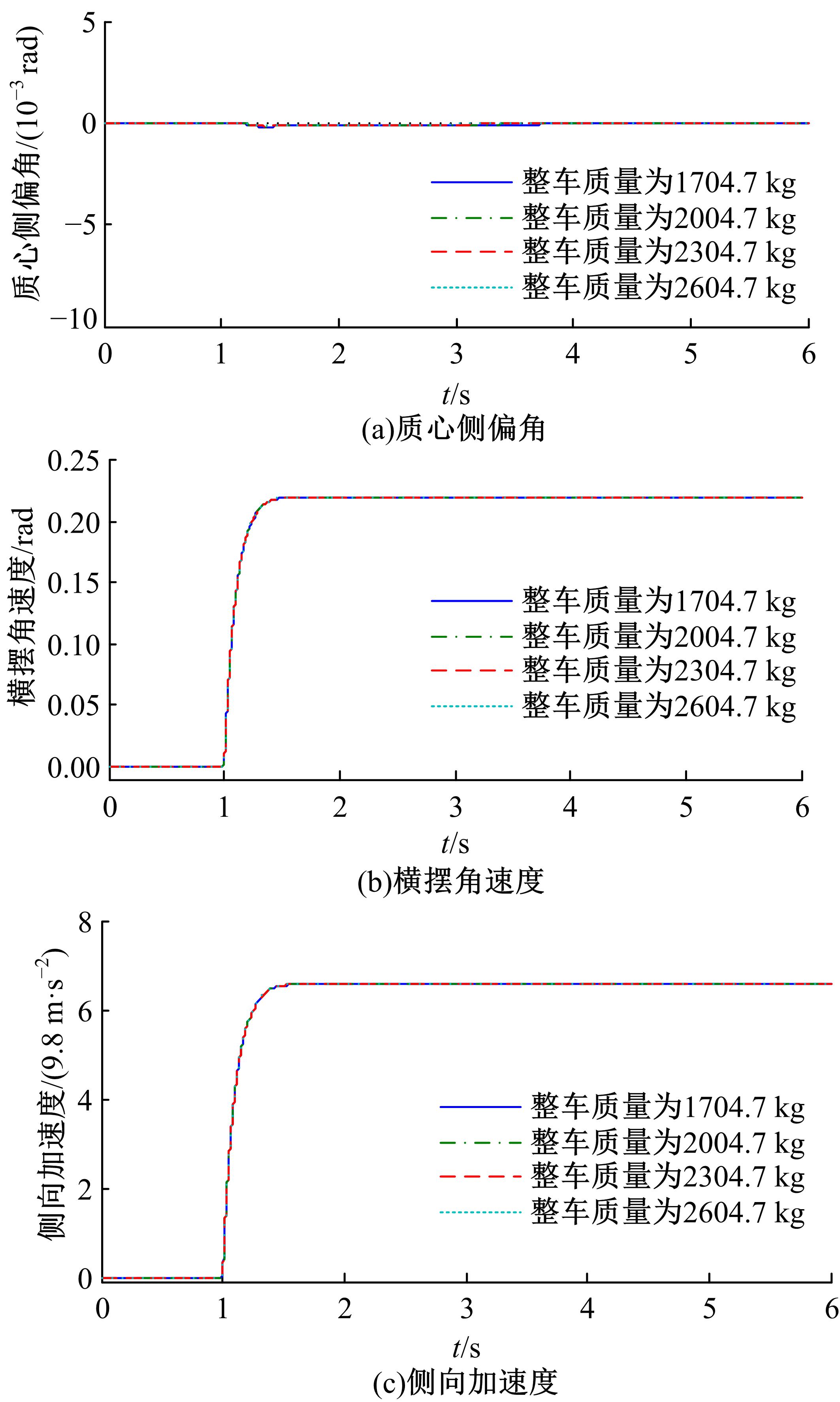
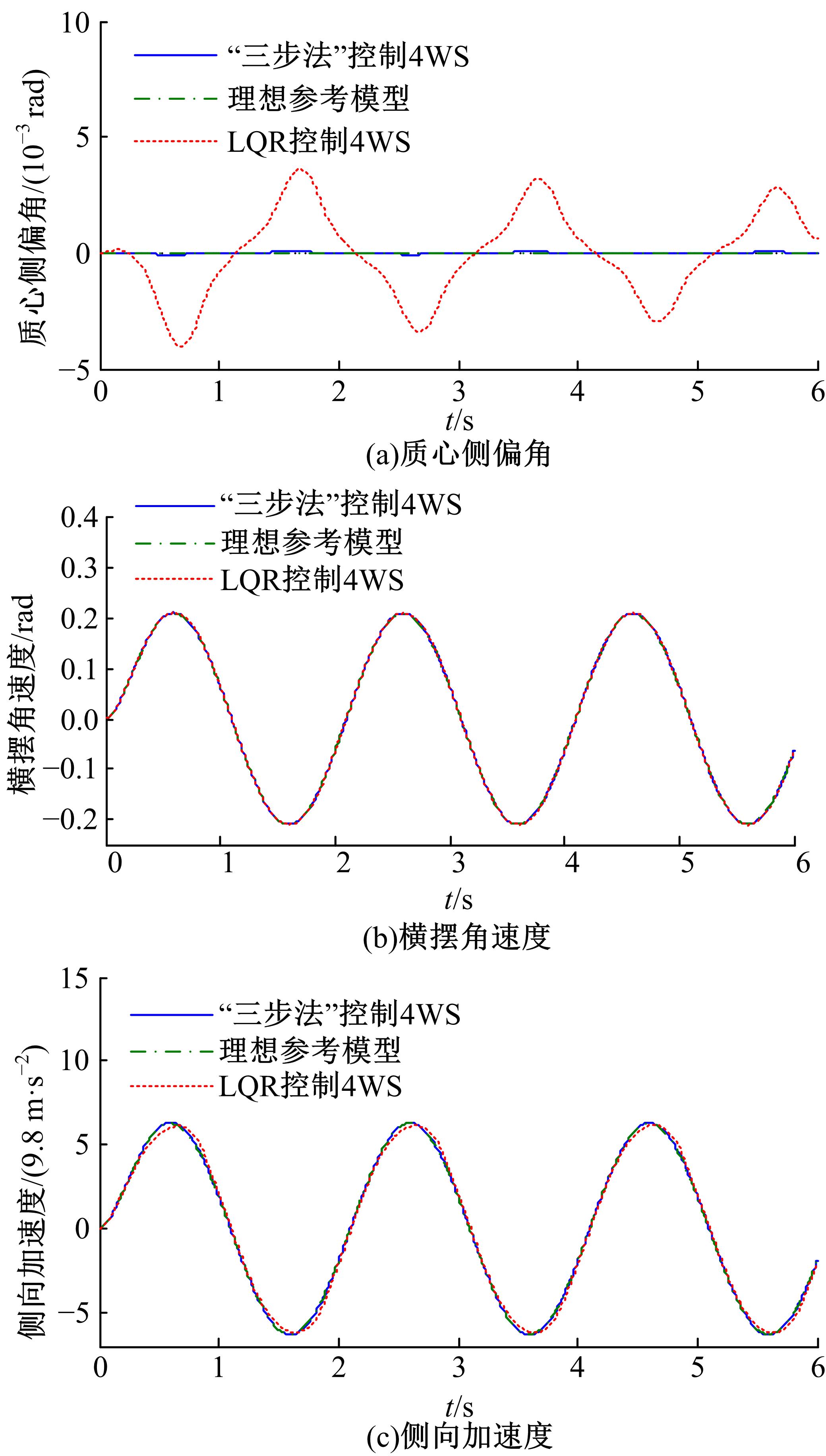
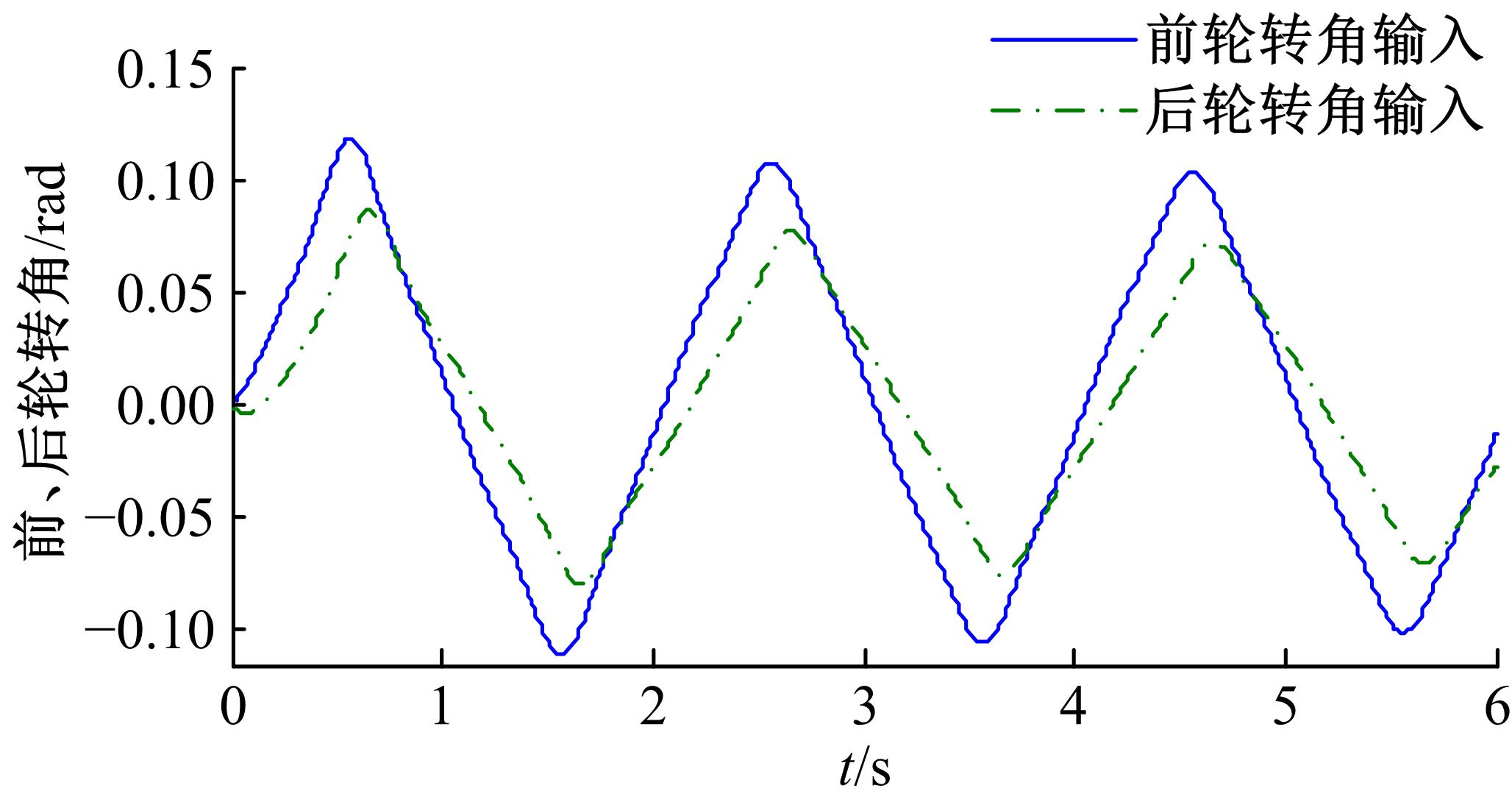
为了提高线控主动四轮转向汽车的主动安全性、操纵稳定性,将三步法控制策略应用于线控主动四轮转向车辆控制问题中,以跟踪参考模型输出为控制目标设计了三步法控制器。该控制器由类稳态控制、考虑参考变化的前馈控制和状态相关的误差反馈控制3部分构成。通过对线控主动四轮转向汽车的前、后轮转角进行控制,保证实际的车辆质心侧偏角和横摆角速度对理想的质心侧偏角和横摆角速度的状态跟踪。采用非线性八自由度汽车模型对控制器的有效性进行验证。仿真结果表明:所设计的控制器能够跟踪上理想模型输出值,提高了线控主动四轮转向汽车的操纵稳定性。
中图分类号:
- TP273








| 1 | Yuhara N . A review of four⁃wheel steering studies from the viewpoint of vehicle dynamics and control[J]. Vehicle System Dynamics,2016,18(1⁃3):151⁃186. |
| 2 | Yin G D , Chen N , Wang J X ,et al . Robust control for 4WS vehicles considering a varying tire⁃road friction coefficient[J]. International Journal of Automotive Technology,2010,11(1):33⁃40. |
| 3 | Lv H , Liu S . Closed⁃loop handling stability of 4WS vehicle with yaw rate control[J]. Journal of Mechanical Engineering,2013,59(10):595⁃603. |
| 4 | Li B , Rakheja S , Feng Y . Enhancement of vehicle stability through integration of direct yaw moment and active rear steering[J]. Proceedings of the Institution of Mechanical Engineers Part D:Journal of Automobile Engineering,2016:230(6):830⁃840. |
| 5 | Russell H E B , Gerdes J C . Design of variable vehicle handling characteristics using four⁃wheel steer⁃by⁃wire[J]. IEEE Transactions on Control Systems Technology,2016,24(5):1529⁃1540. |
| 6 | Zhang Jie , Zhang Yun⁃qing , Chen Li⁃ping , et al . A fuzzy synthesis control strategy for active four⁃wheel steering based on multi⁃body models[C]⫽SAE Paper,2008⁃01⁃0603. |
| 7 | Hamzah N , Aripin M K , Sam Y M ,et al . Yaw stability improvement for four⁃wheel active steering vehicle using sliding mode control[C]∥2012 IEEE 8th International Colloquium on Signal Processing and its Applications,Melaka, Malaysia,2012:127⁃132. |
| 8 | Tian Jie , Chen Ning , Yang Jie ,et al . Fractional order sliding model control of active four⁃wheel steering vehicles[C]∥ICFDA'14 International Conference on Fractional Differentiation and Its Applications,Catania,Italy,2014:1⁃5. |
| 9 | Tan Lei , Yu Shu⁃you , Guo Yang ,et al . Sliding⁃mode control of four wheel steering systems[C]∥IEEE International Conference on Mechatronics and Automation,Takamatsu,Japan,2017:1250⁃1255. |
| 10 | Dahmani H , Pages O , Hajjaji A E . Robust control with parameter uncertainties for vehicle chassis stability in critical situations[C]∥2015 54th IEEE Conference on Decision and Control,Osaka,Japan,2015:209⁃214. |
| 11 | Ye Min , Wang Quan , Jiao Sheng⁃jie . Robust H 2/H ∞ control for the electrohydraulic steering system of a four⁃wheel vehicle[J]. Mathematical Problems in Engineering,2014(4):1⁃12. |
| 12 | 王菁,于树友,陈虹 . 基于约束H ∞输出反馈的四轮转向模型跟踪控制[J]. 信息与控制,2016,45(1):53⁃59. |
| Wang Jing , Yu Shu⁃you , Chen Hong . Model following control of active 4WS vehicle based on constrained output feedback H ∞ control[J]. Information and Control,2016,45(1):53⁃59. | |
| 13 | Amdouni I , Jeddi N , El Amraoui L . Optimal control approach developed to four⁃wheel active steering vehicles[J/OL].[2017⁃07⁃29].https:∥ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber= 6552547. |
| 14 | Zhang Z Y , Huang M H , Ji M X , et al . Design of the linear quadratic control strategy and the closed⁃loop system for the active four⁃wheel⁃steering vehicle[J]. SAE International Journal of Passenger Cars⁃Mechanical Systems,2015,8(1):354⁃363. |
| 15 | Yu Shu⁃you , Wang Jing , Wang Yan ,et al . Disturbance observer based control for four wheel steering vehicles with model reference[J]. IEEE/CAA Journal of Automatica Sinica,2018,5(6):1121⁃1127. |
| 16 | Gao Bing⁃zhao , Chen Hong , Liu Qi⁃fang ,et al . Position control of electric clutch actuator using a triple⁃step nonlinear method[J]. IEEE Transactions on Industrial Electronics,2014,61(12):6995⁃7003. |
| 17 | Hu Y , Hu D , Fan Y ,et al . Electronic throttle controller design using a triple⁃step nonlinear method[C]∥Intelligent Control and Automation,2014:816⁃821. |
| 18 | Zhao Hai⁃yan , Gao Bing⁃zhao , Ren Bing⁃tao ,et al . Integrated control of in⁃wheel motor electric vehicles using a triple⁃step nonlinear method[J]. Journal of the Franklin Institute,2015,352(2):519⁃540. |
| 19 | Masao N , Yutaka H , Sachiko Y . Integrated control of active rear wheel steering and direct yaw moment control[J]. Vehicle System Dynamics,1998,29(Sup.1):416⁃421. |
| 20 | Chen Hong , Gong Xun , Liu Qi⁃fang ,et al . Triple⁃step method to design non⁃linear controller for rail pressure of gasoline direct injection engines[J]. IET Control Theory and Applications,2014,8(11):948⁃959. |
| 21 | 张博,张建伟,郭孔辉,等 . 基于电动助力转向系统的转向盘转角跟随算法[J]. 吉林大学学报:工学版,2019,49(2):336⁃344. |
| Zhang Bo , Zhang Jian⁃wei , Guo Kong⁃hui ,et al . Steering wheel angle tracking control algorithm based on electric power steering system[J]. Journal of Jilin University(Engineering and Technology Edition), 2019,49(2):336⁃344. | |
| 22 | 胡云峰,顾万里,梁瑜,等 . 混合动力汽车启停非线性控制器设计[J].吉林大学学报:工学版,2017,47(4):1207⁃1216. |
| Hu Yun⁃feng , Gu Wan⁃li , Liang Yu ,et al . Start⁃stop control of hybrid vehicle based on nonlinear method[J]. Journal of Jilin University(Engineering and Technology Edition), 2017,47(4):1207⁃1216. | |
| 23 | Esmailzadeh E , Vossoughi G R , Goodarzi A . Dynamic modeling and analysis of a four motorized wheels electric vehicle[J]. Vehicle System Dynamics,2001,35(3):163⁃194. |
| 24 | 安部正人 . 汽车运动和操纵[M]. 北京:机械工业出版社,1998. |
| 25 | 杜峰,闫光辉,魏朗,等 . 主动四轮转向汽车最优控制及闭环操纵性仿真[J]. 汽车工程,2014,36(7):848⁃852. |
| Du Feng , Yan Guang⁃Hui , Wei Lang ,et al . Optimal control and closed⁃loop controllability Simulation for active four⁃wheel steering vehicle[J]. Automotive Engineering,2014,36(7):848⁃852. |
| [1] | 温海营,任翔,徐卫良,丛明,秦文龙,胡书海. 咀嚼机器人颞下颌关节仿生设计及试验测试[J]. 吉林大学学报(工学版), 2019, 49(3): 943-952. |
| [2] | 顾万里,王萍,胡云峰,蔡硕,陈虹. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1811-1819. |
| [3] | 李战东,陶建国,罗阳,孙浩,丁亮,邓宗全. 核电水池推力附着机器人系统设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1820-1826. |
| [4] | 赵爽,沈继红,张刘,赵晗,陈柯帆. 微细电火花加工表面粗糙度快速高斯评定[J]. 吉林大学学报(工学版), 2018, 48(6): 1838-1843. |
| [5] | 王德军, 魏薇郦, 鲍亚新. 考虑侧风干扰的电子稳定控制系统执行器故障诊断[J]. 吉林大学学报(工学版), 2018, 48(5): 1548-1555. |
| [6] | 闫冬梅, 钟辉, 任丽莉, 王若琳, 李红梅. 具有区间时变时滞的线性系统稳定性分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1556-1562. |
| [7] | 张茹斌, 占礼葵, 彭伟, 孙少明, 刘骏富, 任雷. 心肺功能评估训练系统的恒功率控制[J]. 吉林大学学报(工学版), 2018, 48(4): 1184-1190. |
| [8] | 董惠娟, 于震, 樊继壮. 基于激光测振仪的非轴对称超声驻波声场的识别[J]. 吉林大学学报(工学版), 2018, 48(4): 1191-1198. |
| [9] | 田彦涛, 张宇, 王晓玉, 陈华. 基于平方根无迹卡尔曼滤波算法的电动汽车质心侧偏角估计[J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [10] | 张士涛, 张葆, 李贤涛, 王正玺, 田大鹏. 基于零相差轨迹控制方法提升快速反射镜性能[J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
| [11] | 王林, 王洪光, 宋屹峰, 潘新安, 张宏志. 输电线路悬垂绝缘子清扫机器人行为规划[J]. 吉林大学学报(工学版), 2018, 48(2): 518-525. |
| [12] | 胡云峰, 王长勇, 于树友, 孙鹏远, 陈虹. 缸内直喷汽油机共轨系统结构参数优化[J]. 吉林大学学报(工学版), 2018, 48(1): 236-244. |
| [13] | 朱枫, 张葆, 李贤涛, 王正玺, 张士涛. 基于强跟踪卡尔曼滤波的陀螺信号处理[J]. 吉林大学学报(工学版), 2017, 47(6): 1868-1875. |
| [14] | 晋超琼, 张葆, 李贤涛, 申帅, 朱枫. 基于扰动观测器的光电稳定平台摩擦补偿策略[J]. 吉林大学学报(工学版), 2017, 47(6): 1876-1885. |
| [15] | 冯建鑫. 具有测量时滞的不确定系统的递推鲁棒滤波[J]. 吉林大学学报(工学版), 2017, 47(5): 1561-1567. |
|
||