吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (11): 2549-2557.doi: 10.13229/j.cnki.jdxbgxb20210395
• 交通运输工程·土木工程 • 上一篇
基于Lennard-Jones势的车辆跟驰动力学特性及模型
曲大义1( ),赵梓旭1,贾彦峰1,王韬1,刘琼辉2
),赵梓旭1,贾彦峰1,王韬1,刘琼辉2
- 1.青岛理工大学 机械与汽车工程学院,山东 青岛 266520
2.山东公路技师学院,济南 250217
Car⁃following dynamics characteristics and model based on Lennard⁃Jones potential
Da-yi QU1(),Zi-xu ZHAO1,Yan-feng JIA1,Tao WANG1,Qiong-hui LIU2
- 1.School of Mechanical and Automotive Engineering,Qingdao University of Technology,Qingdao 266520,China
2.Shandong Institute of Highway Technican,Jinan 250217,China
摘要:
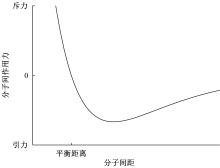
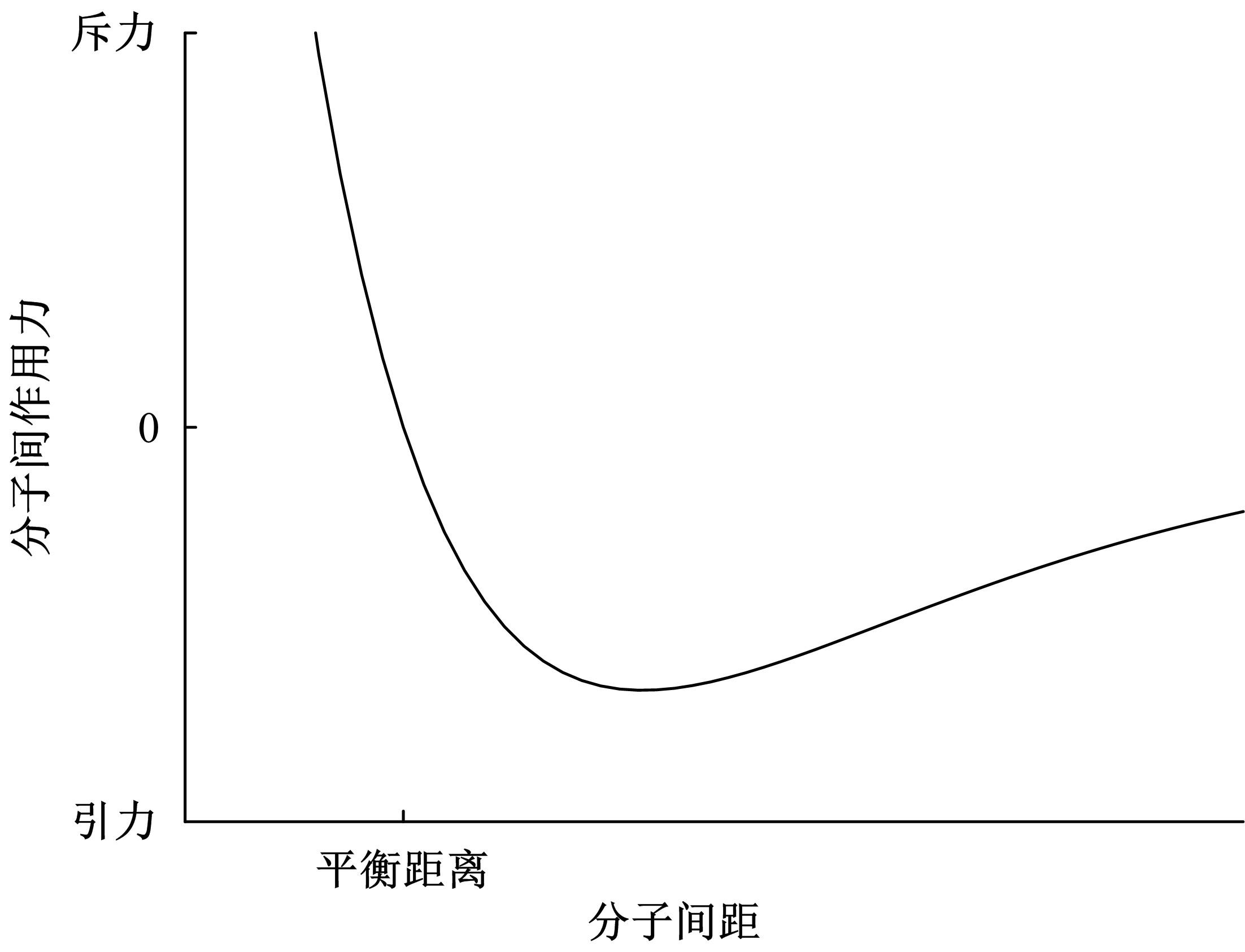
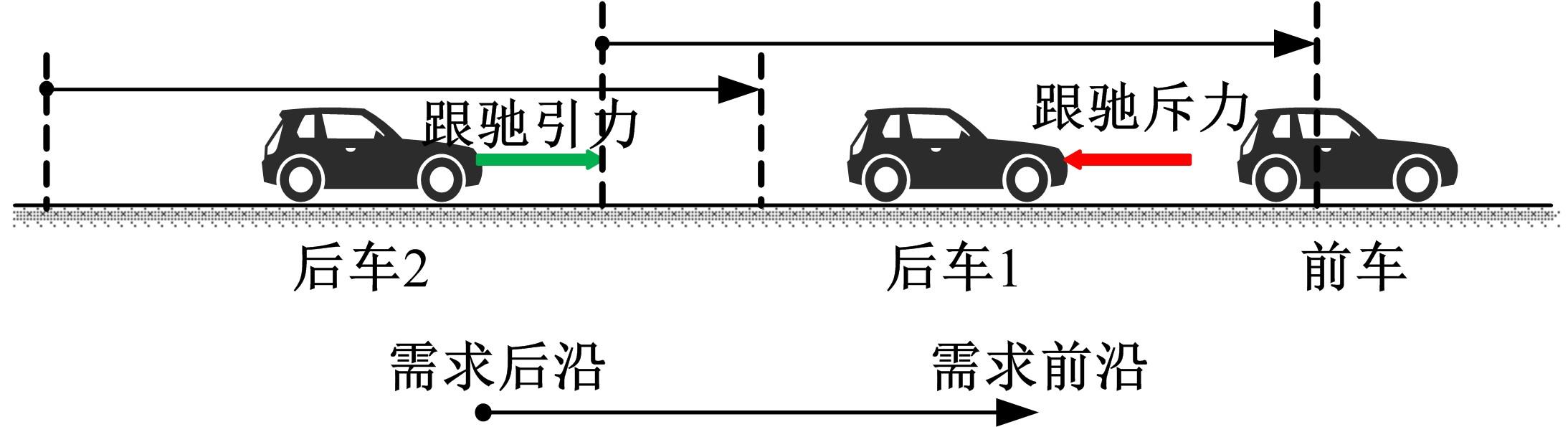
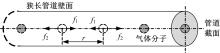
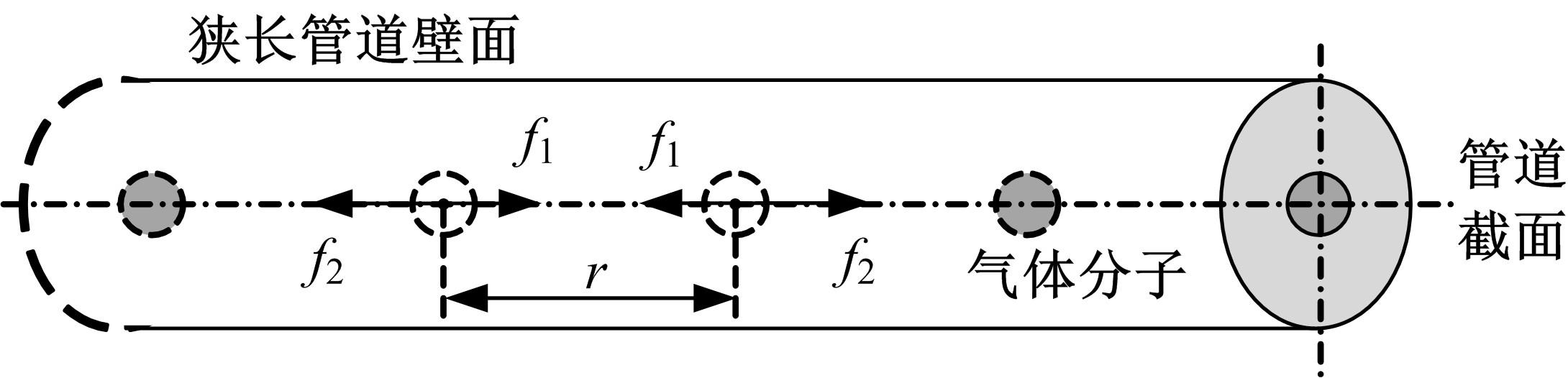
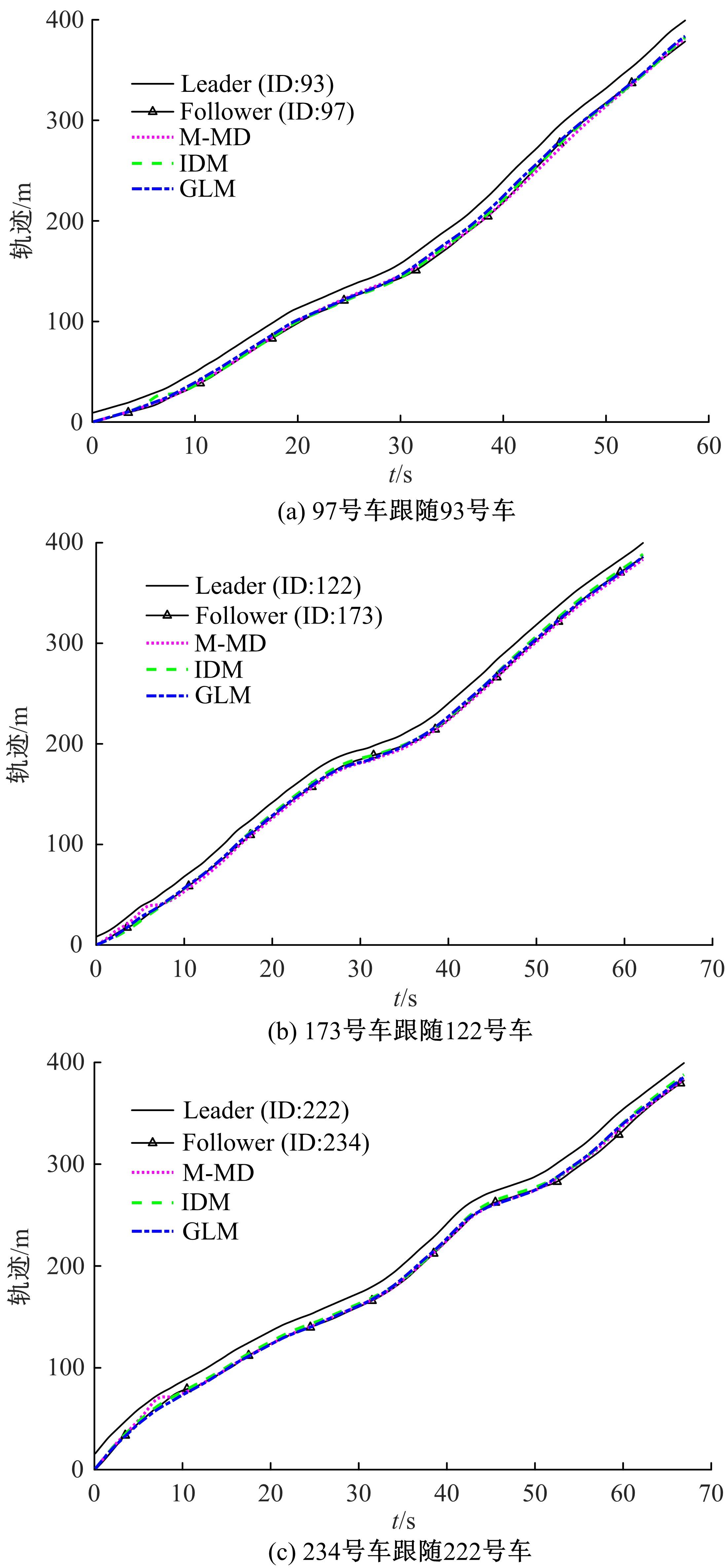
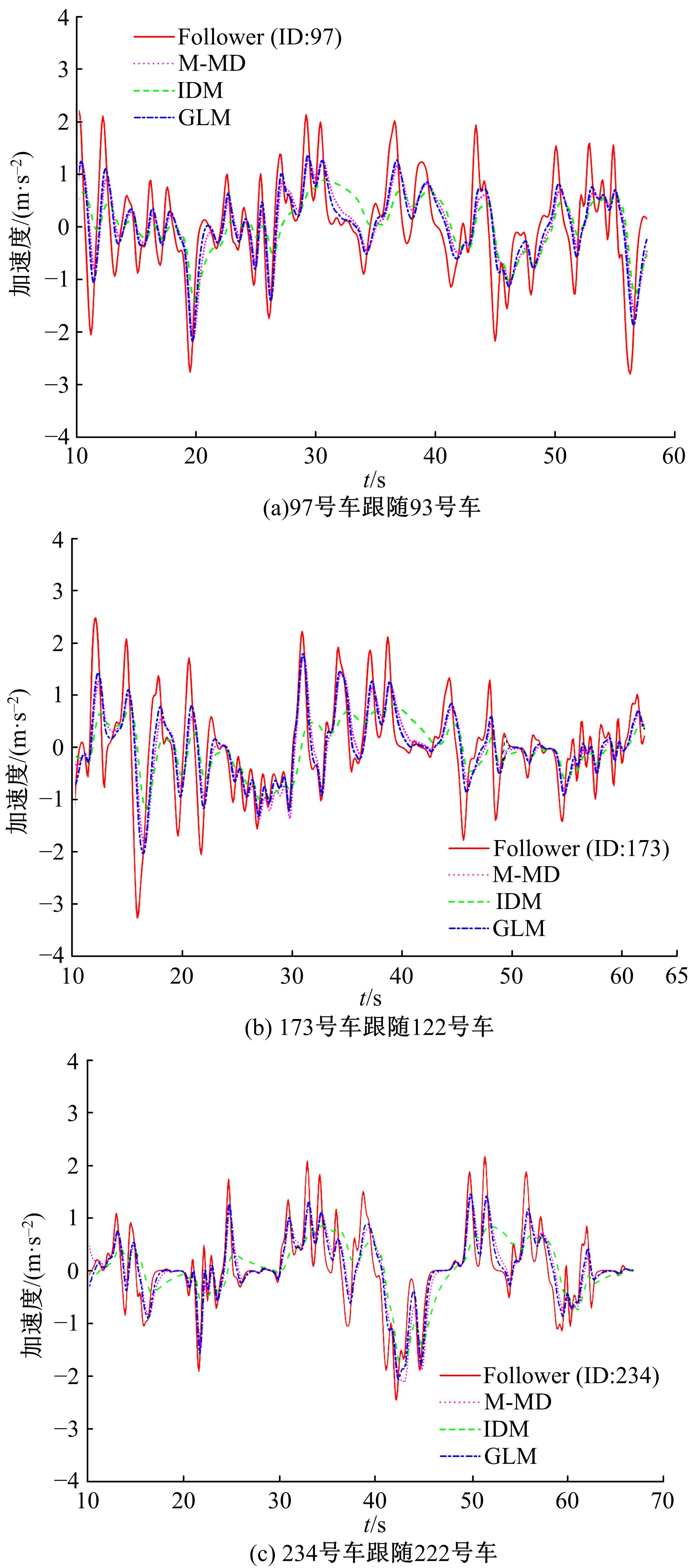
为更准确描述道路中前后相邻车辆的跟驰交互行为,利用其与某些微观粒子的热力学表现的相似性,构建车辆跟驰模型。通过系统相似性分析,将车辆类比为狭长管道中的微观粒子,将复杂的车辆跟驰交互行为简化为后车不断寻求与前车保持需求安全距离的动态过程,建立不同情况下的需求安全距离表达式。通过对适用于惰性气体体系热力学分析的Lennard-Jones势函数的数学推导,明确其各变量对势能的影响关系,分析了现有的分子跟驰模型存在的问题。参考Lennard-Jones势函数构建了车辆相互作用势函数,考虑了车道边界产生的道路壁面势的影响,提出了基于Lennard-Jones势的车辆跟驰模型。仿真测试结果表明:对比已有的分子跟驰模型和IDM模型,该模型得出的车辆加速度结果与实际数据的平均绝对误差与均方根误差更低,证明基于Lennard-Jones势的车辆跟驰模型对真实车辆的跟驰行为具有更好的拟合效果。
中图分类号:
- U491





| 1 | Gazis D C, Herman R, Rothery R W. Nonliner following-the-leader models of traffic flow[J]. Operations Research, 1961, 9(4): 545-567. |
| 2 | Bando M, Hasebe K, Nakayama A, et al. Dynamical model of traffic congestion and numerical simulation[J]. Physical Review E, 1995, 51(2): 1035-1042. |
| 3 | Helbing D, Tilch B. Generalized force model of traffic dynamics[J]. Physical Review E, 1998, 58(1): 133-138. |
| 4 | Jiang R, Wu Q S, Zhu Z J. Full velocity difference model for a car-following theory[J]. Physical Review E, 2001, 64(12): 017101. |
| 5 | 曲昭伟,潘昭天,陈永恒, 等. 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报: 工学版, 2019, 49(4): 1092-1099. |
| Qu Zhao-wei, Pan Zhao-tian, Chen Yong-heng, et al. Car-following model with improving safety distance based on optimal velocity model[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1092-1099. | |
| 6 | 陈秀锋. 基于分子动力学的车辆运行安全特性研究[D]. 长春: 吉林大学交通学院, 2013. |
| Chen Xiu-feng. A study on vehicle operating safety characteristics based on molecular dynamics[D]. Changchun: College of Transportation, Jilin University, 2013. | |
| 7 | 曲大义,杨建,陈秀锋,等.车辆跟驰的分子动力学特性及其模型[J]. 吉林大学学报: 工学版, 2012, 42(5): 1198-1202. |
| Qu Da-yi, Yang Jian, Chen Xiu-feng, et al. Molecular kinetics behavior of car-following and its model[J]. Journal of Jilin University(Engineering and Technology Edition), 2012, 42(5) :1198-1202. | |
| 8 | 曲大义, 邴其春, 贾彦峰, 等. 基于分子动力学的车辆换道交互行为特性及其模型[J]. 交通运输系统工程与信息, 2019, 19(3): 68-74. |
| Qu Da-yi, Bing Qi-chun, Jia Yan-feng, et al. Molecular dynamics characteristics and models of vehicle lane changing interaction behavior[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(3) :68-74. | |
| 9 | Wolf M T, Burdick J W. Artificial potential functions for highway driving with collision avoidance[C]∥IEEE International Conference on Robotics and Automation, California, America, 2008: 3731-3736. |
| 10 | 李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆跟驰模型[J]. 中国公路学报, 2019, 32(12): 76-87. |
| Li Lin-heng, Gan Jing, Qu Xu, et al. Car-following model based on safety potential field theory under connected and automated vehicle environment[J]. China Journal of Highway and Transport, 2019, 32(12): 76-87. | |
| 11 | 李娟,曲大义,刘聪,等.基于分子动力学的跟驰特性及其模型[J].公路交通科技, 2018, 35(3): 126-131. |
| Li Juan, Qu Da-yi, Liu Cong, et al. Car-following characteristics and its models based on molecular dynamics[J]. Journal of Highway and Transportation Research and Development, 2018, 35(3): 126-131. | |
| 12 | 杨龙海,王晖,李帅, 等. 改进分子动力学的车辆跟驰模型[J]. 重庆大学学报, 2021, 44(7): 26-33. |
| Yang Long-hai, Wang Hui, Li Shuai, et al. Improved molecular dynamics car-following model[J]. Journal of Chongqing University,2021,44(7): 26-33. | |
| 13 | 曹炳阳, 陈民, 过增元. 纳米通道滑移流动的分子动力学研究[J]. 工程热物理学报, 2003(4): 670-672. |
| Cao Bing-yang, Chen Min, Guo Zeng-yuan. Molecular dynamics studies of slip flow in nanochannel[J] Journal of Engineering Thermophysics, 2003(4): 670-672. | |
| 14 | Lennard-Jones J E. Cohesion[J]. Proceedings of the Physical Society, 1931, 43(5): 461-482. |
| 15 | Wang X, Ramírez-Hinestrosa S, Dobnikar J, et al. The Lennard-Jones potential: when (not) to use it[J]. Physical Chemistry Chemical Physics, 2020, 22(19): 10624-10633. |
| 16 | Ferguson D M, Kollman P A. Can the Lennard-Jones 6‐12 function replace the 10‐12 form in molecular mechanics calculations [J]. Journal of Computational Chemistry, 1991, 12(5): 620-626. |
| 17 | 王涛, 高自友, 赵小梅. 多速度差模型及稳定性分析[J]. 物理学报, 2006(2): 634-640. |
| Wang Tao, Gao Zi-you, Zhao Xiao-mei. Multiple velocity difference model and its stability analysis[J]. Acta Physica Sinica, 2006(2): 634-640. | |
| 18 | 王殿海, 陶鹏飞, 金盛, 等. 跟驰模型参数标定及验证方法[J]. 吉林大学学报: 工学版, 2011, 41(): 59-65. |
| Wang Dian-hai, Tao Peng-fei, Jin Sheng, et al. Method of calibrating and validating car-following model[J]. Journal of Jilin University(Engineering and Technology Edition), 2011, 41(Sup.1): 59-65. | |
| 19 | Montanino M, Punzo V. Making NGSIM data usable for studies on traffic flow theory: multistep method for vehicle trajectory reconstruction[J]. Transportation Research Record, 2013(1): 99-111. |
| 20 | 鲁斌. 基于数据驱动方法的车辆跟驰行为建模与分析[D]. 成都: 西南交通大学交通运输与物流学院, 2017. |
| Lu Bin. Modeling and analysis of car-following behavior using data-driven methods[D]. Chengdu: College of Transportation and Logistics, Southwest Jiaotong University, 2017. | |
| 21 | 罗亚中, 袁端才, 唐国金. 求解非线性方程组的混合遗传算法[J]. 计算力学学报, 2005(1): 109-114. |
| Luo Ya-zhong, Yuan Duan-cai, Tang Guo-jin. Hybrid genetic algorithm for solving systems of nonlinear equations[J]. Chinese Journal of Computational Mechanics, 2005(1): 109-114. |
| [1] | 张鑫,张卫华. 快速路合流区主线不同交通状态下的安全性分析[J]. 吉林大学学报(工学版), 2022, 52(6): 1308-1314. |
| [2] | 张文会,伊静,刘委,于秋影,王连震. 基于MADYMO的大客车追尾碰撞事故乘员损伤机理[J]. 吉林大学学报(工学版), 2022, 52(1): 118-126. |
| [3] | 曲大义,黑凯先,郭海兵,贾彦峰,王韬. 车联网环境下车辆换道博弈行为及模型[J]. 吉林大学学报(工学版), 2022, 52(1): 101-109. |
| [4] | 刘志伟,刘建荣,邓卫. 基于潜在类别的无人驾驶汽车选择行为[J]. 吉林大学学报(工学版), 2021, 51(4): 1261-1268. |
| [5] | 徐进,潘存书,符经厚,刘俊,王郸祁. 典型道路场景以及场景切换时的速度行为特性[J]. 吉林大学学报(工学版), 2021, 51(4): 1331-1341. |
| [6] | 查伟雄,蔡其燕,李剑,严利鑫. 边路车辆出入条件下城市干线信号协调相位差优化[J]. 吉林大学学报(工学版), 2021, 51(2): 565-574. |
| [7] | 曲昭伟,潘昭天,陈永恒,陶鹏飞,孙迪. 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报(工学版), 2019, 49(4): 1092-1099. |
| [8] | 宋现敏, 邓晓磊, 高铭, 曲昭伟. 基于动态反应时间的全速度差模型[J]. 吉林大学学报(工学版), 2017, 47(6): 1703-1709. |
| [9] | 敬明, 王昊, 王文静. 基于跟驰数据采集分析的各异性跟驰模型[J]. 吉林大学学报(工学版), 2015, 45(3): 761-768. |
| [10] | 徐程, 曲昭伟, 金盛. 考虑侧向偏移的车辆跟驰行为建模及仿真[J]. 吉林大学学报(工学版), 2014, 44(6): 1609-1615. |
| [11] | 孙轶轩, 邵春福, 岳昊, 朱亮. 基于SVM灵敏度的城市交通事故严重程度影响因素分析[J]. 吉林大学学报(工学版), 2014, 44(5): 1315-1320. |
| [12] | 曲大义, 杨建, 陈秀锋, 卞晓华. 车辆跟驰的分子动力学特性及其模型[J]. , 2012, 42(05): 1198-1202. |
| [13] | 王殿海, 陶鹏飞, 金盛, 马东方. 跟驰模型参数标定及验证方法[J]. 吉林大学学报(工学版), 2011, 41(增刊1): 59-65. |
| [14] | 董宏辉,孙晓亮,贾利民,秦勇. 多模态的交通流量预测模型[J]. 吉林大学学报(工学版), 2011, 41(03): 645-649. |
| [15] | 姜桂艳,吴超腾. 基于GPS采集车辆行程时间的路段划分模型[J]. 吉林大学学报(工学版), 2009, 39(增刊2): 177-0181. |
|
||