吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (7): 1687-1695.doi: 10.13229/j.cnki.jdxbgxb20210120
• 通信与控制工程 • 上一篇
基于Frenet框架的协同自适应巡航控制算法设计
聂光明1( ),谢波1,田彦涛1,2()
),谢波1,田彦涛1,2()
- 1.吉林大学 通信工程学院,长春 130022
2.吉林大学 工程仿生教育部重点实验室,长春 130022
Design of cooperative adaptive cruise control algorithm based on Frenet framework
Guang-ming NIE1(),Bo XIE1,Yan-tao TIAN1,2()
- 1.College of Communication Engineering,Jilin University,Changchun 130022,China
2.Key Laboratory of Bionic Engineering,Ministry of Education,Jilin University,Changchun 130022,China
摘要:
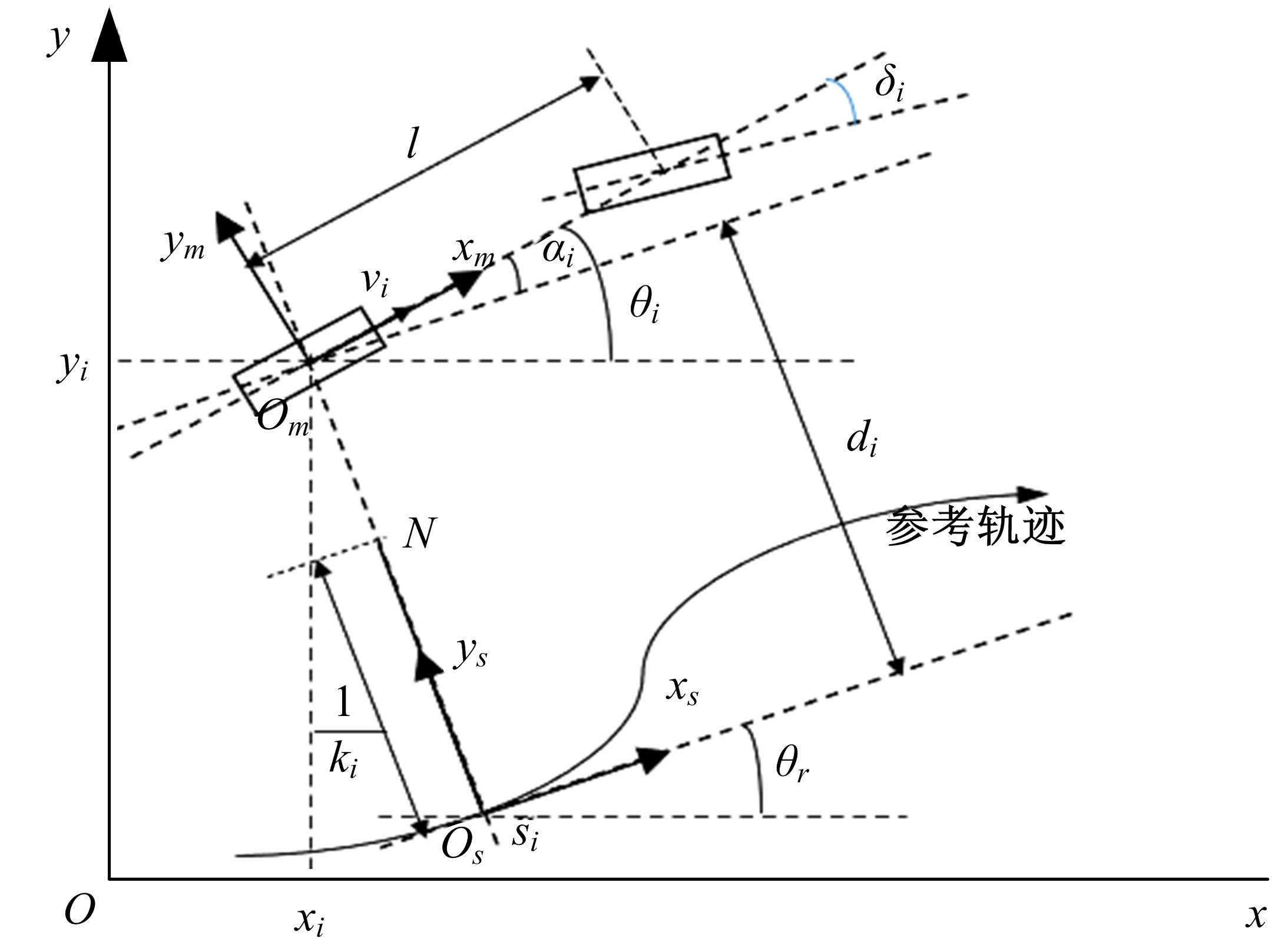
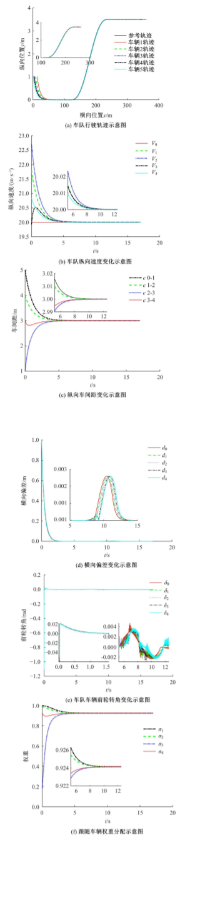
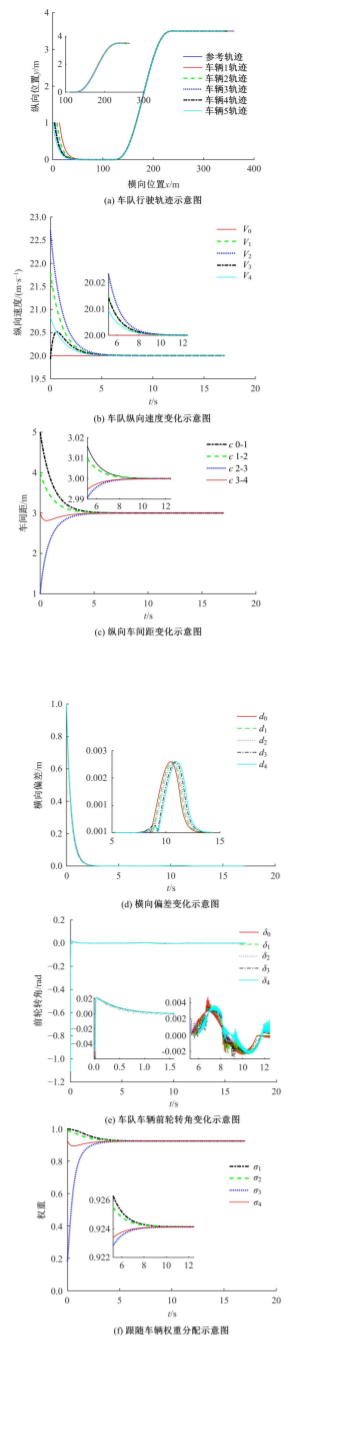
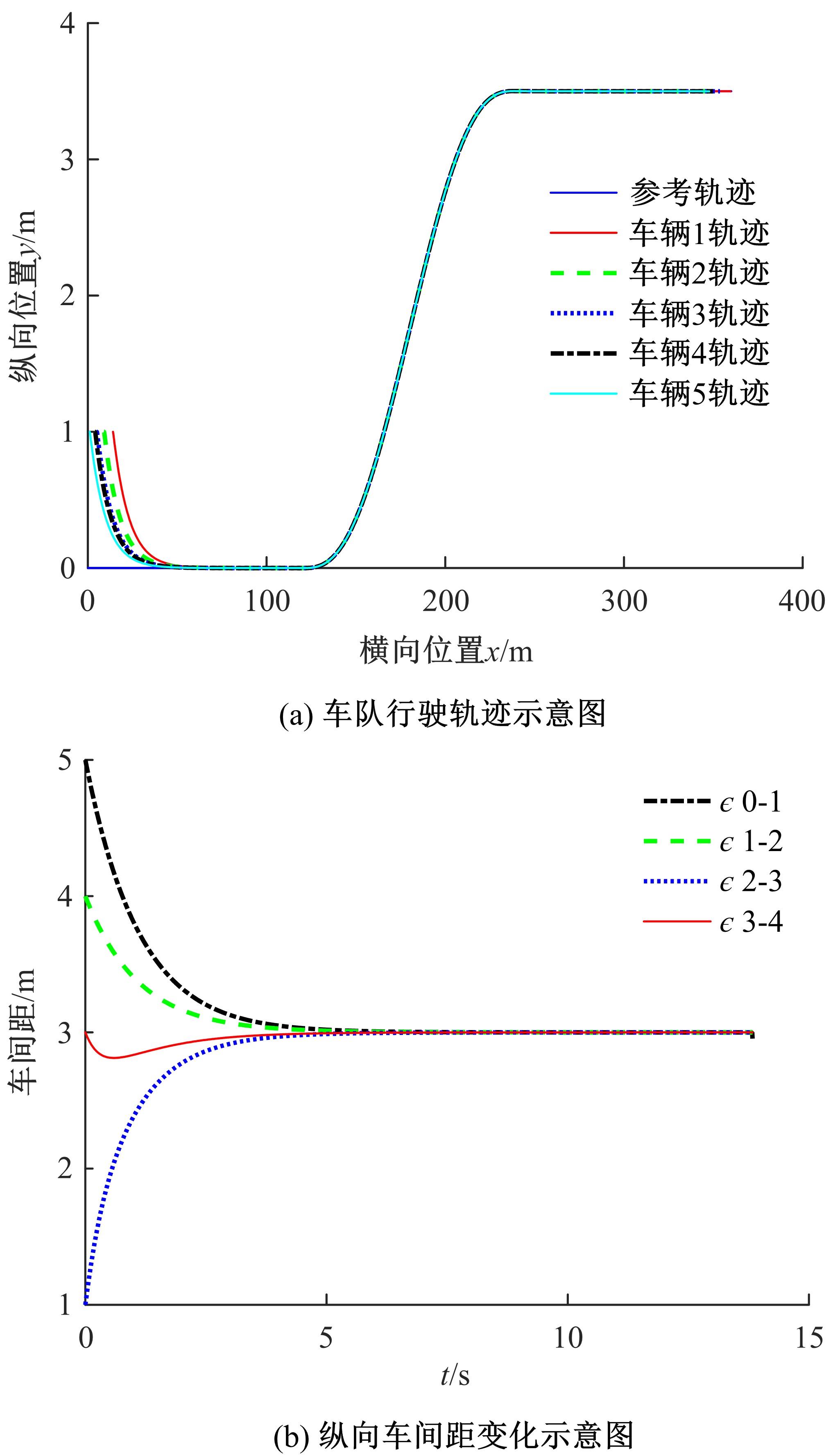
当前对协同自适应巡航控制算法的研究主要集中在单车道纵向方向上,对横向控制考虑的很少,但实际车辆运动过程中转弯以及换道等场景必不可少。为此,本文基于Frenet框架对车队中单个车辆的动力学模型在横向与纵向两个自由度进行解耦。针对车辆的纵向控制问题,通过满足指数收敛条件来保证被控车辆对临近前车和首车的跟踪性,并通过sigmoidal函数来平衡跟踪权重。针对车辆的横向控制问题,采用李雅普诺夫方法进行控制算法设计。仿真实验结果验证了本文控制算法的有效性。
中图分类号:
- U461.1







| 1 | Ploeg J, Scheepers B T M, Nunen E V, et al. Design and experimental evaluation of cooperative adaptive cruise control[C]∥International IEEE Conference on Intelligent Transportation Systems, Washington DC, USA, 2011:260-265. |
| 2 | Shladover S E, Su D, Lu X Y. Impacts of cooperative adaptive cruise control on freeway traffic flow[J]. Transportation Research Record Journal of the Transportation Research Board, 2012, 2324(1):63-70. |
| 3 | Feng S, Zhang Y, Li S E, et al. String stability for vehicular platoon control: definitions and analysis methods[J]. Annual Reviews in Control, 2019, 47:81-97. |
| 4 | Zhu Y, He H, Zhao D. LMI-based synthesis of string-stable controller for cooperative adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2019(99):1-10. |
| 5 | 何德峰,罗捷,舒晓翔. 自主网联车辆时滞反馈预测巡航控制[J]. 吉林大学学报:工学版, 2021, 51(1): 349-357. |
| He De-feng, Luo Jie, Shu Xiao-xiang. Delay-feedback predictive cruise control of autonomous and connected vehicles[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(1): 349-357. | |
| 6 | Ploeg J, Semsar-Kazerooni E, Lijster G, et al. Graceful degradation of cooperative adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1):488-497. |
| 7 | Abou Harfouch Y, Yuan S, Baldi S. An adaptive switched control approach to heterogeneous platooning with inter-vehicle communication losses[J]. IEEE Transactions on Control of Network Systems, 2017, 5(3):1434-1444. |
| 8 | Li B, Zhang Y, Feng Y, et al. Balancing computation speed and quality: a decentralized motion planning method for cooperative lane changes of connected and automated vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2018,3(3):340-350. |
| 9 | Li T, Wu J, Chan C Y, et al. A cooperative lane change model for connected and automated vehicles[J]. IEEE Access, 2020,8: 54940-54951. |
| 10 | Kianfar R, Ali M, Falcone P, et al. Combined longitudinal and lateral control design for string stable vehicle platooning within a designated lane[C]∥The 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 2014. |
| 11 | Caruntu C F, Maxim A, Rafaila R C. Multiple-lane vehicle platooning based on a multi-agent distributed model predictive control strategy[C]∥The 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 2018. |
| 12 | Werling M, Ziegler J, Kammel S, et al. Optimal trajectory generation for dynamic street scenarios in a Frenet frame[C]∥IEEE International Conference on Robotics and Automation (ICRA), Anchorage, USA,2010. |
| 13 | 王沙晶, 陈建业. 基于Frenet坐标系的智能车运动规划研究[J]. 移动电源与车辆, 2019, 195(1):26-33. |
| Wang Sha-jing, Chen Jian-ye. Motion planning of autonomous vehicle based on Frenet coordinate system[J]. Movable Power Station & Vehicle, 2019, 195(1):26-33. | |
| 14 | 齐雪, 张利军, 赵杰梅. Serret-Frenet坐标系下AUV自适应路径跟踪控制[J]. 系统科学与数学, 2016,36(11):1851-1864. |
| Qi Xue, Zhang Li-jun, Zhao Jie-mei. Adaptive path following control of autonomous underwater vehicles in Serret-Frenet coordinate[J]. Journal of Systems Science and Mathematical Sciences, 2016, 36(11):1851-1864. | |
| 15 | Choi J H, Kim Y H. Associated curves of a Frenet curve and their applications[J]. Applied Mathematics & Computation, 2012, 218(18):9116-9124. |
| 16 | 游峰, 谷广. 面向无人驾驶的车辆协同换道轨迹规划[J]. 科学技术与工程, 2018, 018(15):155-161. |
| You Feng, Gu Guang. Collaborative lane changing trajectory planning of autonomous vehicles[J]. Science Technology and Engineering,2018,18(15) : 155-161. | |
| 17 | 汪佳兴,庄继晖,程晓鸣,等. B样条曲线下的MPC轨迹重规划算法[J]. 重庆理工大学学报:自然科学版,2020,34(4):27-35. |
| Wang Jia-xing, Zhuang Ji-hui, Cheng Xiao-ming, et al. MPC trajectory re-planning algorithm under B-spline curve[J]. Journal of Chongqing Institute of Technology(Natural Sciences Edition), 2020,34(4):27-35. | |
| 18 | Polvara R, Sharma S, Wan J, et al. Obstacle avoidance approaches for autonomous navigation of unmanned surface vehicles[J]. The Journal of Navigation, 2018, 71(1):241-256. |
| 19 | 韩月起,张凯,宾洋,等. 基于凸近似的避障原理及无人驾驶车辆路径规划模型预测算法[J]. 自动化学报, 2020,46(1):153-167. |
| Han Yue-qi, Zhang Kai, Yang Bin, et al. Convex approximation based avoidance theory and path planning MPC for driver-less vehicles[J]. Acta Automatica Sinica, 2020,46(1):153-167. |
| [1] | 杨红波,史文库,陈志勇,郭年程,赵燕燕. 基于某二级减速齿轮系统的齿面修形优化[J]. 吉林大学学报(工学版), 2022, 52(7): 1541-1551. |
| [2] | 张家旭,郭崇,王晨,赵健,王欣志. 基于半实物仿真平台的自动泊车系统性能评价[J]. 吉林大学学报(工学版), 2022, 52(7): 1552-1560. |
| [3] | 郝帅,程川泰,王军年,张君媛,俞有. 运动型SUV驾驶室布置人机优化设计与测试评价[J]. 吉林大学学报(工学版), 2022, 52(7): 1477-1488. |
| [4] | 华琛,牛润新,余彪. 地面车辆机动性评估方法与应用[J]. 吉林大学学报(工学版), 2022, 52(6): 1229-1244. |
| [5] | 李雄,兰凤崇,陈吉清,童芳. Hybird III假人模型与CHUBM人体生物力学模型的正碰损伤对比[J]. 吉林大学学报(工学版), 2022, 52(6): 1264-1272. |
| [6] | 刘兴涛,刘晓剑,武骥,何耀,刘新天. 基于曲线压缩和极限梯度提升算法的锂离子电池健康状态估计[J]. 吉林大学学报(工学版), 2022, 52(6): 1273-1280. |
| [7] | 张英朝,李昀航,郭子瑜,王国华,张喆,苏畅. 长头重型卡车气动减阻优化[J]. 吉林大学学报(工学版), 2022, 52(4): 745-753. |
| [8] | 史文库,张曙光,张友坤,陈志勇,江逸飞,林彬斌. 基于改进海鸥算法的磁流变减振器模型辨识[J]. 吉林大学学报(工学版), 2022, 52(4): 764-772. |
| [9] | 庄蔚敏,陈沈,吴迪. 碳纤维增强复合材料包裹强化形式对钢管横向冲击性能的影响[J]. 吉林大学学报(工学版), 2022, 52(4): 819-828. |
| [10] | 李杰,陈涛,郭文翠,赵旗. 汽车非平稳随机振动空间域虚拟激励法及应用[J]. 吉林大学学报(工学版), 2022, 52(4): 738-744. |
| [11] | 李伟,宋海生,陆浩宇,史文库,王强,王晓俊. 复合材料板簧迟滞特性线性辨识方法[J]. 吉林大学学报(工学版), 2022, 52(4): 829-836. |
| [12] | 段亮,宋春元,刘超,魏苇,吕成吉. 基于机器学习的高速列车轴承温度状态识别[J]. 吉林大学学报(工学版), 2022, 52(1): 53-62. |
| [13] | 庄蔚敏,陈沈,王楠. 温度对车身钢铝胶铆连接结构热应力变化的影响[J]. 吉林大学学报(工学版), 2022, 52(1): 70-78. |
| [14] | 陈剑斌,周宋泽,费峰永,陈永龙,凌国平. 过盈量及滚花方式对装配式凸轮轴压装失效的影响[J]. 吉林大学学报(工学版), 2021, 51(6): 1959-1966. |
| [15] | 胡兴军,张靖龙,罗雨霏,辛俐,李胜,胡金蕊,兰巍. 冷却管结构及进气方向对空冷中冷器性能的影响[J]. 吉林大学学报(工学版), 2021, 51(6): 1933-1942. |
|
||