吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (1): 180-186.doi: 10.13229/j.cnki.jdxbgxb20200783
• 计算机科学与技术 • 上一篇
三维水声海底地形地貌实时拼接与可视化
李志华( ),张烨超,詹国华
),张烨超,詹国华
- 杭州师范大学 信息科学与工程学院,杭州 311121
Realtime mosaic and visualization of 3D underwater acoustic seabed topography
Zhi-hua LI(),Ye-chao ZHANG,Guo-hua ZHAN
- College of Information Science and Engineering,Hangzhou Normal University,Hangzhou 311121,China
摘要:
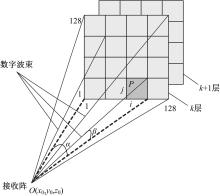
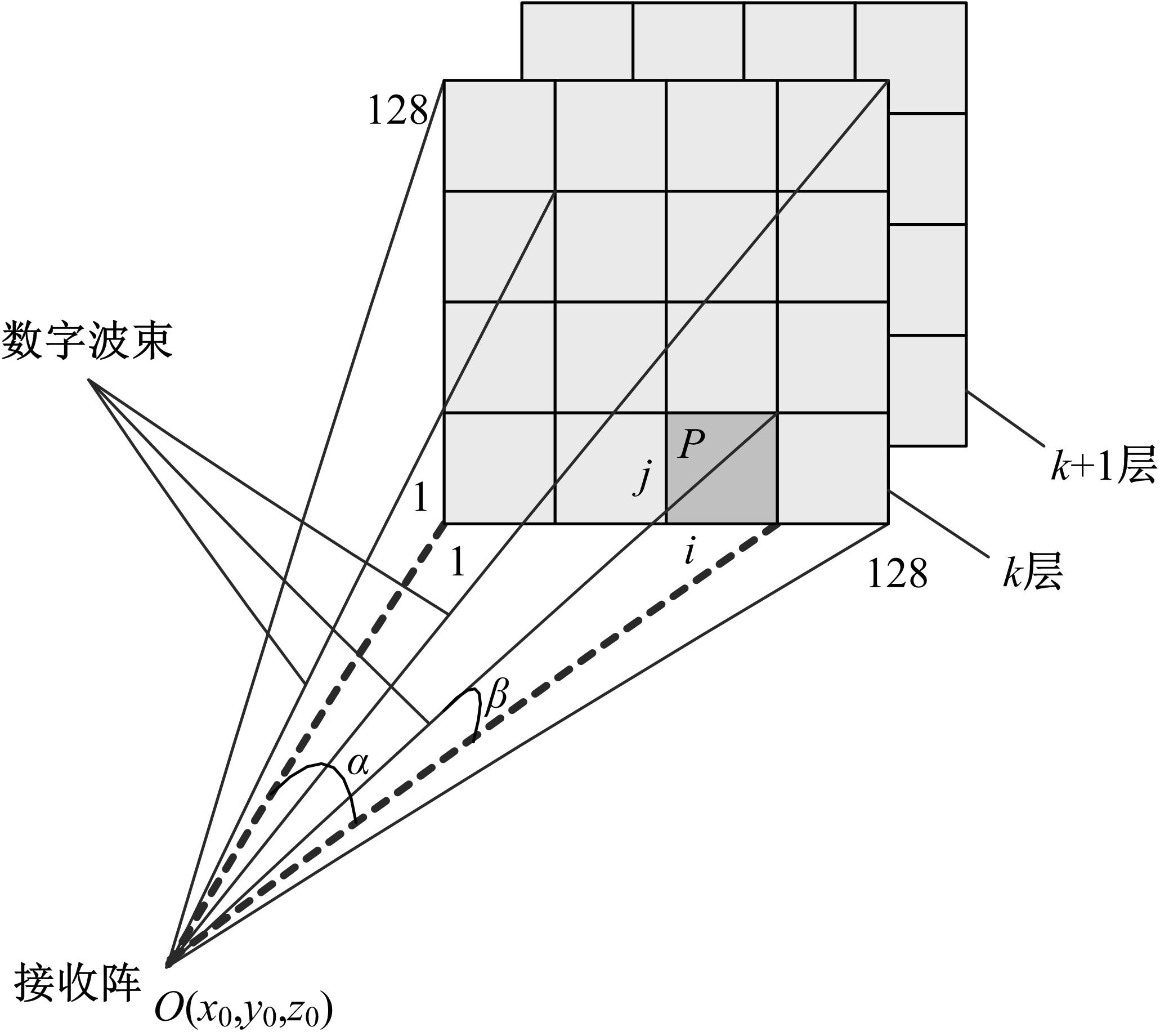
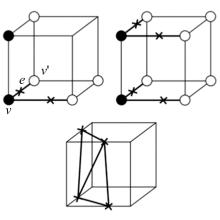
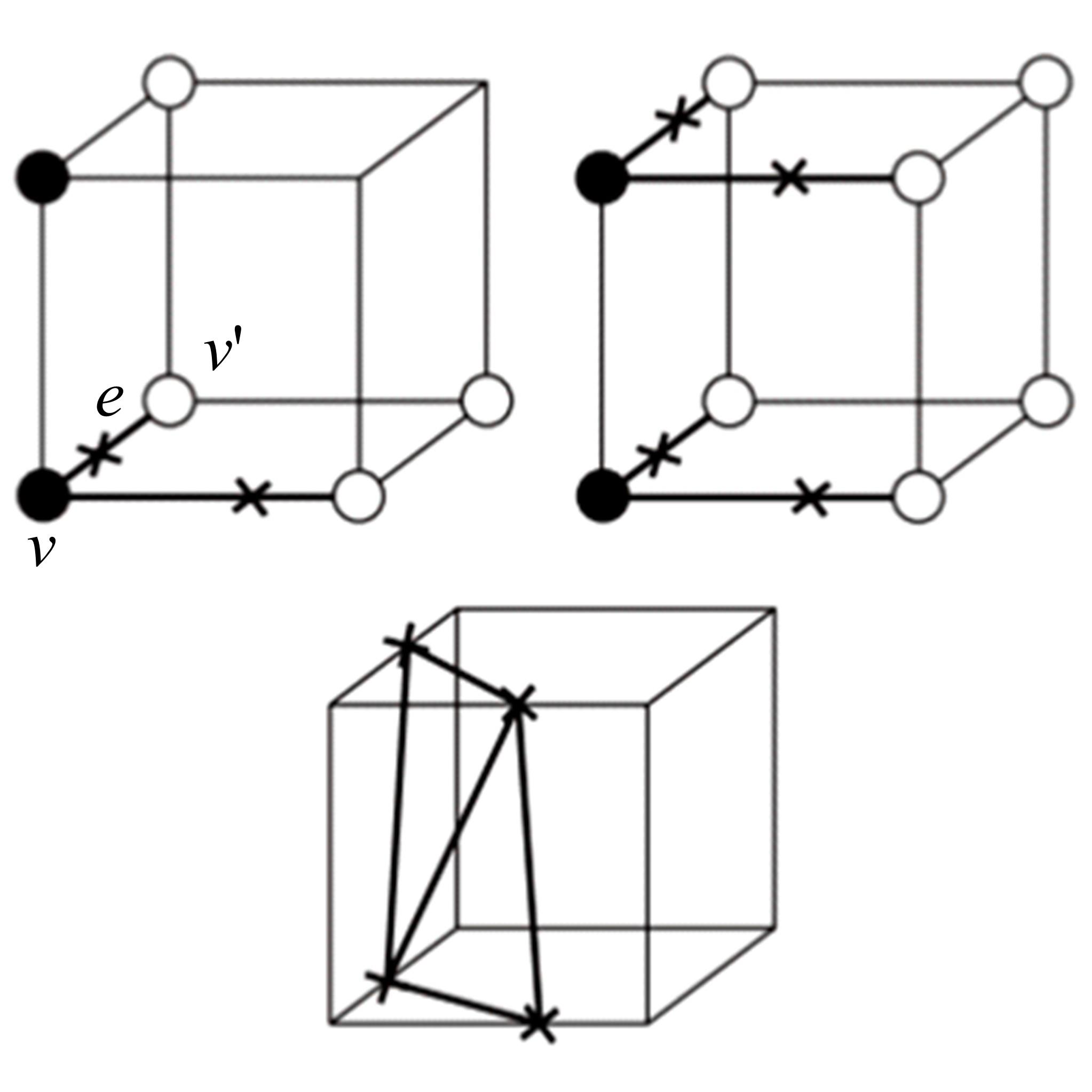
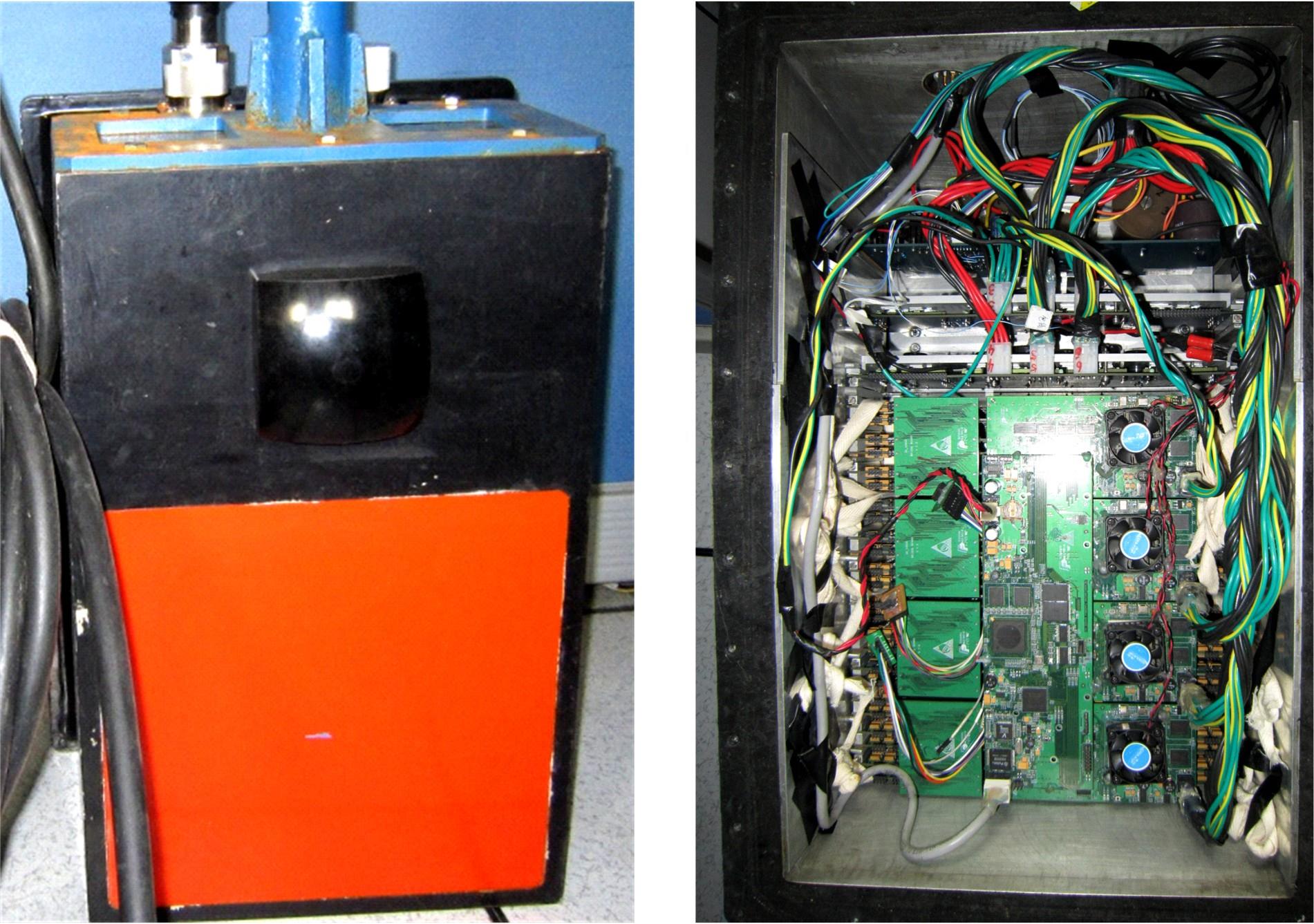
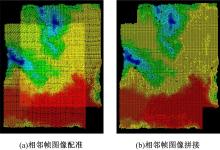
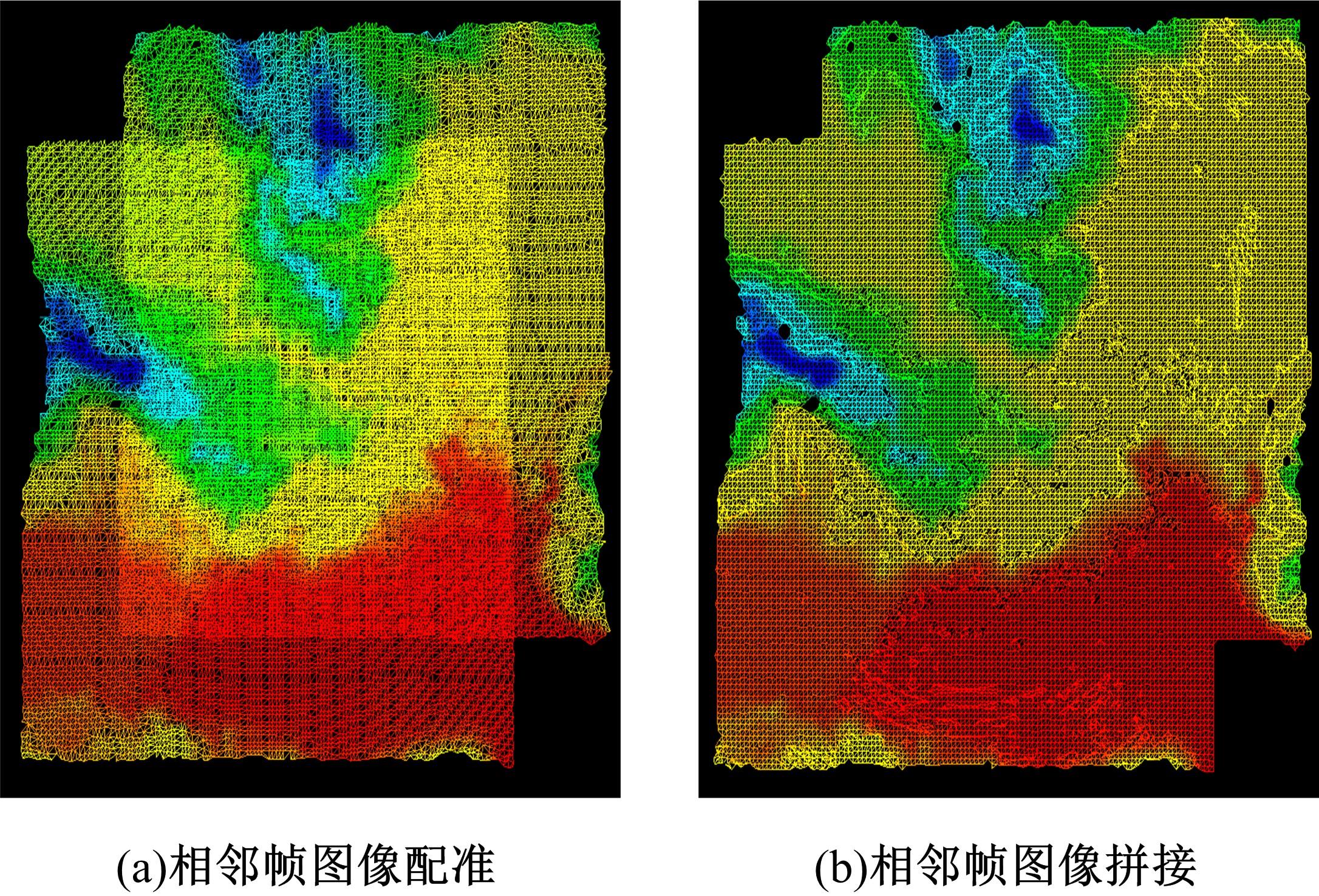
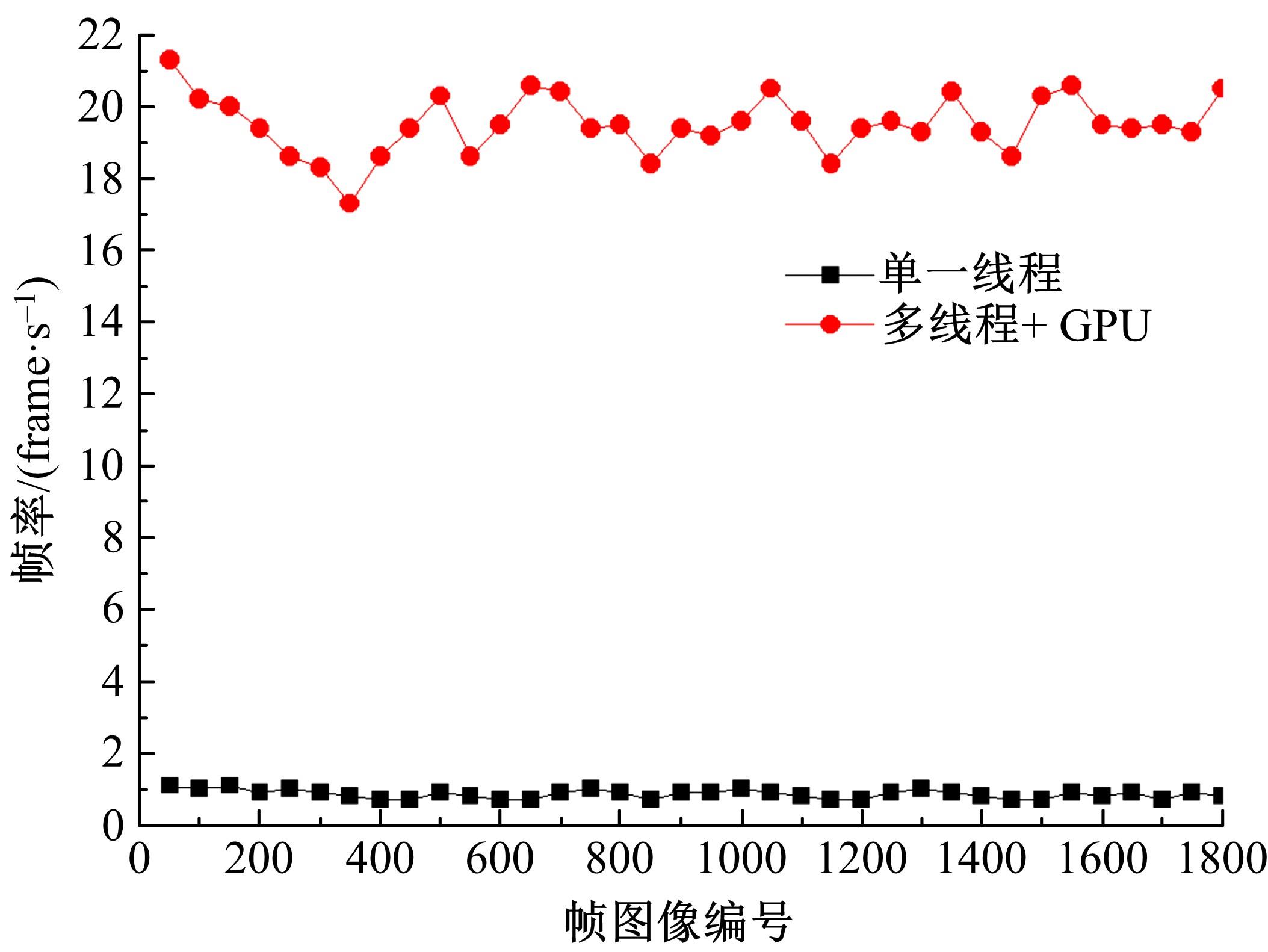
提出了一种水声海底地形地貌实时拼接与可视化方法,系统利用差分GPS定位仪和姿态仪获得声呐换能器载体的平移与旋转矩阵信息作为迭代初始参数,消除三维水声相邻帧图像配准过程中的迭代耗时和失配现象。通过配准矩阵将相邻两帧声学图像转换到同一坐标系后,在拼接之前将声呐数据网格化,获得插值点声学图像数据。为了生成声学图像可视化兼容数据集,对声学图像中的尖峰冗余点进行剔除,同时系统采用多线程并行处理和GPU三维图像渲染加速架构,均衡多个CPU核之间的负载,并利用GPU和VTK库对三维图像渲染加速。室内水池和湖试实验表明:该方法有效地实现了三维水声地形地貌的实时拼接与可视化。
中图分类号:
- TP391






| 1 | 李振,彭华,姜景捷,等. 侧扫声呐在琼州海峡跨海通道地壳稳定性调查中的应用[J]. 地质力学学报, 2018, 24(2): 244-252. |
| Li Zhen, Peng Hua, Jiang Jing-jie, et al. Application of side scan sonar in the investigation of crustal stability of the cross-sea channel in the QiongZhou strait[J]. Journal of Geomechanics, 2018, 24(2): 244-252. | |
| 2 | 来向华,潘国富,苟诤慷,等. 侧扫声呐系统在海底管道检测中应用研究[J]. 海洋工程, 2011, 29(3): 117-121. |
| Lai Xiang-hua, Pan Guo-fu, Gou Zheng-kang, et al. Study on application of side scan sonar in submarine pipeline inspection[J]. The Ocean Engineering, 2011, 29(3): 117-121. | |
| 3 | Negahdaripour S, Aykin M D, Sinnarajah S. Dynamic scene analysis and mosaicing of benthic habitats by FS sonar imaging——issues and complexities[C]∥MTS/IEEE Oceans,Hilton Waikoloa Village, USA, 2011: 1-7. |
| 4 | 梅赛,高金耀,杨春国,等. 冲绳海槽南部多波束海底地形虚拟视景仿真初探[J]. 海洋测绘, 2010, 30(2): 19-23. |
| Mei Sai, Gao Jing-yao, Yang Chun-guo, et al. Initial exploration from virtual scene simulation of multibeam submarine topography in the south of the Okinawa Trough[J]. Hydrographic Surveying and Charging, 2010, 30(2): 19-23. | |
| 5 | 郭军,马桂云,马金凤,等. 一种针对侧扫声呐图像的数字镶嵌技术方法[J]. 测绘工程, 2017, 26(6): 34-39. |
| Guo Jun, Ma Gui-yun, Ma Jin-feng, et al. A digital mosaic method for side-scan images[J]. Engineering of Surveying and Mapping, 2017, 26(6): 34-39. | |
| 6 | 赵建虎,王爱学,王晓,等. 侧扫声呐条带图像分段拼接方法研究[J]. 武汉大学学报:信息科学版, 2013, 38(9): 1034-1038. |
| Zhao Jian-hu, Wang Ai-xue, Wang Xiao, et al. A segmented mosaic method for side scan sonar strip images using corresponding features[J]. Geomatics and Information Science of Wuhan University, 2013, 38(9): 1034-1038. | |
| 7 | Hurtos N, Nagappa S, Palomeras N, et al. Real-time mosaicing with two-dimensional forward-looking sonar[C]//IEEE International Conference on Robotics and Automation, Hong Kong,China,2014: 601-606. |
| 8 | Hurtos N, Ribas D, Cufi X, et al. Fourier-based registration for robust forward-looking sonar mosaicing in low-visibility underwater environments[J]. Journal of Field Robotics, 2014, 32(1): 123-151. |
| 9 | Hurtos N, Cufi X, Petillot Y, et al. Fourier-based registrations for two-dimensional forward-looking sonar image mosaicing[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 2012: 5298–5305. |
| 10 | Zhang J, Sohel F, Bennamoun M, et al. NSCT-based fusion method for forward-looking sonar image mosaic[J]. IET Radar, Sonar and Navigation, 2017, 11(10): 1512-1522. |
| 11 | Zhang J, Sohel F, Bian H Y, et al. Forward-looking sonar image registration using polar transform[C]∥MTS/IEEE Oceans, Monterey, USA,2016: 1-6. |
| 12 | 张健,卞红雨,张志刚. 基于FFT配准和多尺度融合的声呐图像拼接算法[J]. 南京大学学报:自然科学, 2017,53(4): 646-653. |
| Zhang Jian, Bian Hong-yu, Zhang Zhi-gang. Sonar image mosaic based on FFT registration and multi-scale fusion[J]. Journal of Nanjing University (Natural Sciences), 2017,53(4): 646-653. | |
| 13 | Saucan A, Chonavel T. Model-based adaptive 3D sonar reconstruction in reverberating environment[J]. IEEE Transactions on Image Processing, 2015, 24(10):2928-2940. |
| 14 | Zhang L, Joucencel B, Fang Z, et al. 3D reconstruction of seabed surface through sonar data of AUVS[J]. Indian Journal of Geo-Marine Sciences, 2012, 41(6): 509-515. |
| 15 | Murino V, Trucco A. Three-dimensional image generation and processing in underwater acoustic vision[C]∥Proceedings of IEEE, Washington, USA, 2000: 1903-1948. |
| 16 | 李海森,陈宝伟,么彬,等. 多子阵高分辨海底地形探测算法及其FPGA和DSP阵列实现[J]. 仪器仪表学报, 2010, 31(2): 281-285. |
| Li Hai-sen, Chen Bao-wei, Bin Me, et al. Implementation of high resolution sea bottom terrain detection method based on FPGA and DSP array[J]. Chinese Journal of Scientific Instrument, 2010, 31(2): 281-285. | |
| 17 | Ikeuchi K, Wheeler M D. Iterative estimation of rotation and translation using quaternion[R]. Pittsburgh:Technical Report CMU-SC-95-215, 1995. |
| 18 | Cignoni P, Montani C, Scopigno R, et al. The Marching intersections algorithm for merging range images[R]. The Visual Computer, 2004, 20:149-164. |
| [1] | 雷景佩,欧阳丹彤,张立明. 基于知识图谱嵌入的定义域值域约束补全方法[J]. 吉林大学学报(工学版), 2022, 52(1): 154-161. |
| [2] | 欧阳丹彤,张必歌,田乃予,张立明. 结合格局检测与局部搜索的故障数据缩减方法[J]. 吉林大学学报(工学版), 2021, 51(6): 2144-2153. |
| [3] | 徐艳蕾,何润,翟钰婷,赵宾,李陈孝. 基于轻量卷积网络的田间自然环境杂草识别方法[J]. 吉林大学学报(工学版), 2021, 51(6): 2304-2312. |
| [4] | 杨勇,陈强,曲福恒,刘俊杰,张磊. 基于模拟划分的SP⁃k⁃means-+算法[J]. 吉林大学学报(工学版), 2021, 51(5): 1808-1816. |
| [5] | 赵亚慧,杨飞扬,张振国,崔荣一. 基于强化学习和注意力机制的朝鲜语文本结构发现[J]. 吉林大学学报(工学版), 2021, 51(4): 1387-1395. |
| [6] | 董延华,刘靓葳,赵靖华,李亮,解方喜. 基于BPNN在线学习预测模型的扭矩实时跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(4): 1405-1413. |
| [7] | 刘富,梁艺馨,侯涛,宋阳,康冰,刘云. 模糊c-harmonic均值算法在不平衡数据上改进[J]. 吉林大学学报(工学版), 2021, 51(4): 1447-1453. |
| [8] | 尚福华,曹茂俊,王才志. 基于人工智能技术的局部离群数据挖掘方法[J]. 吉林大学学报(工学版), 2021, 51(2): 692-696. |
| [9] | 赵海英,周伟,侯小刚,张小利. 基于多任务学习的传统服饰图像双层标注[J]. 吉林大学学报(工学版), 2021, 51(1): 293-302. |
| [10] | 欧阳丹彤,马骢,雷景佩,冯莎莎. 知识图谱嵌入中的自适应筛选[J]. 吉林大学学报(工学版), 2020, 50(2): 685-691. |
| [11] | 李贻斌,郭佳旻,张勤. 人体步态识别方法与技术[J]. 吉林大学学报(工学版), 2020, 50(1): 1-18. |
| [12] | 徐谦,李颖,王刚. 基于深度学习的行人和车辆检测[J]. 吉林大学学报(工学版), 2019, 49(5): 1661-1667. |
| [13] | 高万夫,张平,胡亮. 基于已选特征动态变化的非线性特征选择方法[J]. 吉林大学学报(工学版), 2019, 49(4): 1293-1300. |
| [14] | 欧阳丹彤,肖君,叶育鑫. 基于实体对弱约束的远监督关系抽取[J]. 吉林大学学报(工学版), 2019, 49(3): 912-919. |
| [15] | 顾海军, 田雅倩, 崔莹. 基于行为语言的智能交互代理[J]. 吉林大学学报(工学版), 2018, 48(5): 1578-1585. |
|
||