吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (11): 3406-3416.doi: 10.13229/j.cnki.jdxbgxb.20230063
• 通信与控制工程 • 上一篇
DoS攻击下网联车队安全协同自适应预测巡航控制
宋秀兰( ),柴伟豪,何德峰,应颂翔
),柴伟豪,何德峰,应颂翔
- 浙江工业大学 信息工程学院,杭州 310023
Security-oriented cooperative adaptive predictive cruise control for connected and automated vehicular platoons under DoS attacks
Xiu-lan SONG(),Wei-hao CHAI,De-feng HE,Song-xiang YING
- College of Information Engineering,Zhejiang University of Technology,Hangzhou 310023,China
摘要:
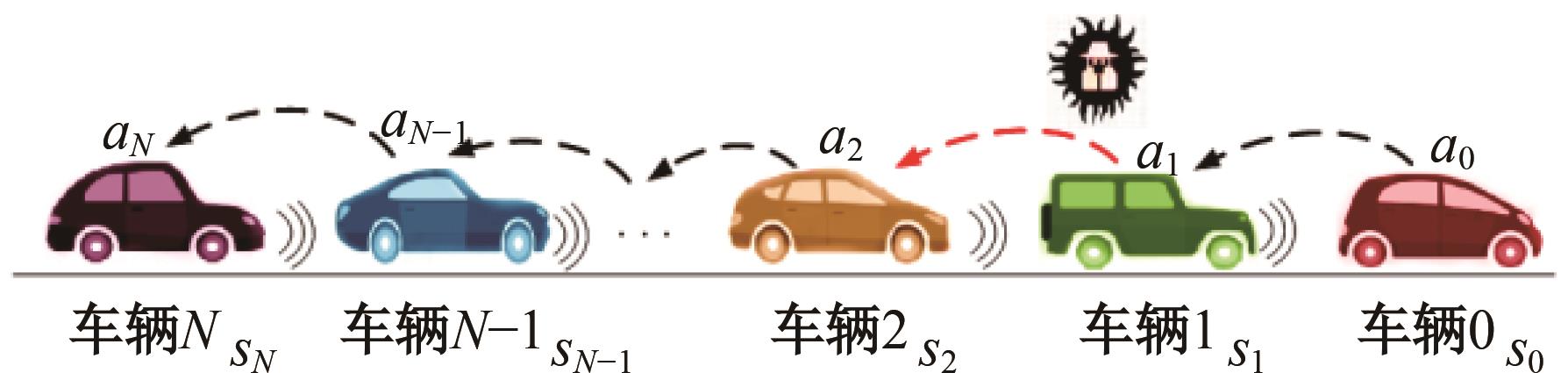
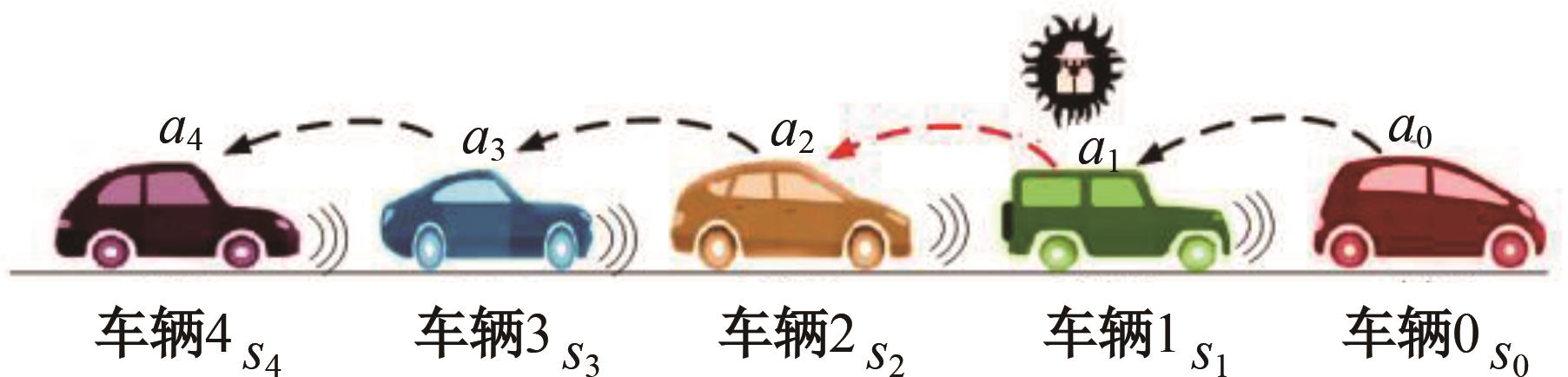
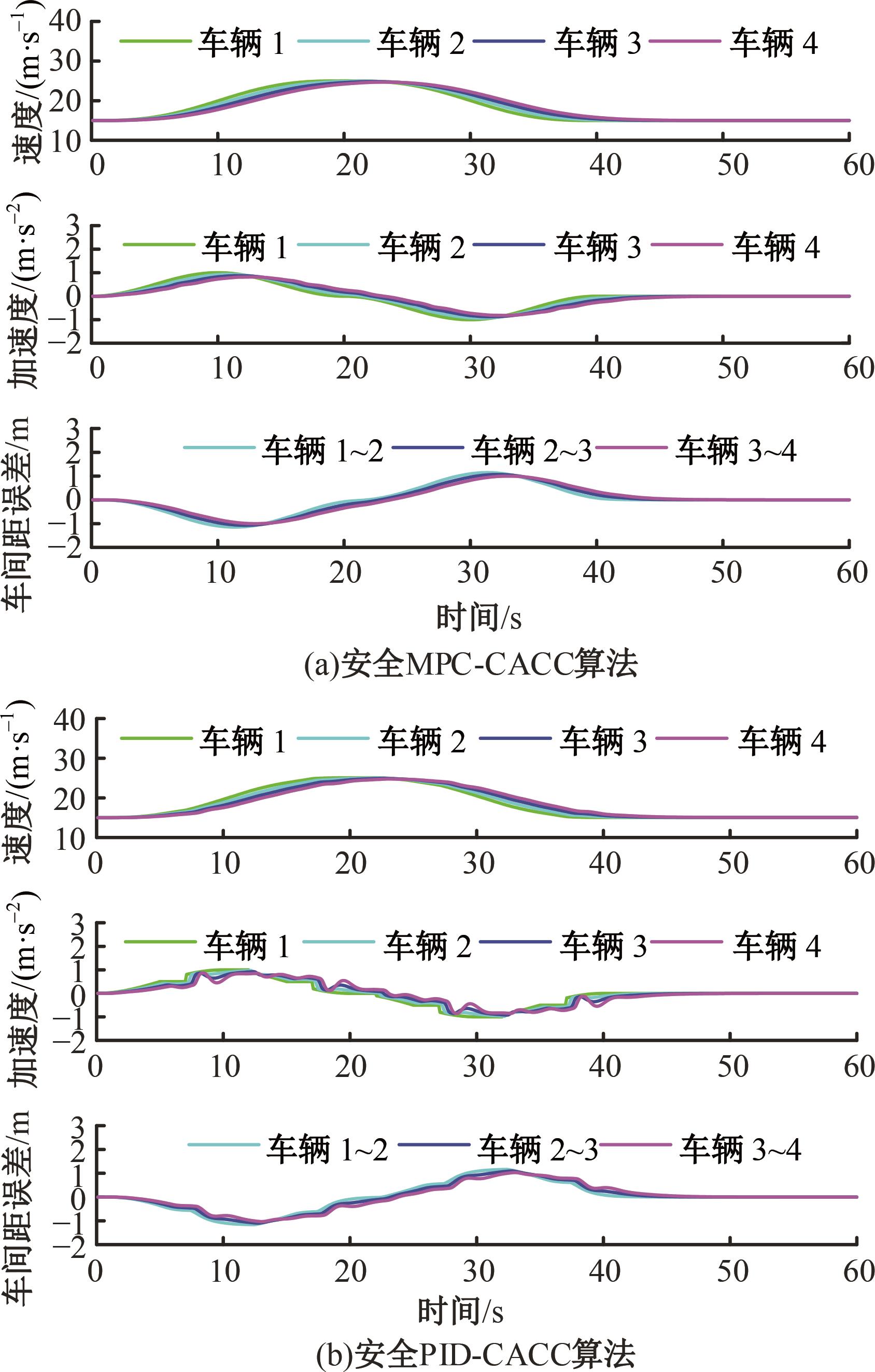
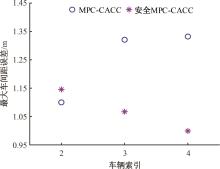
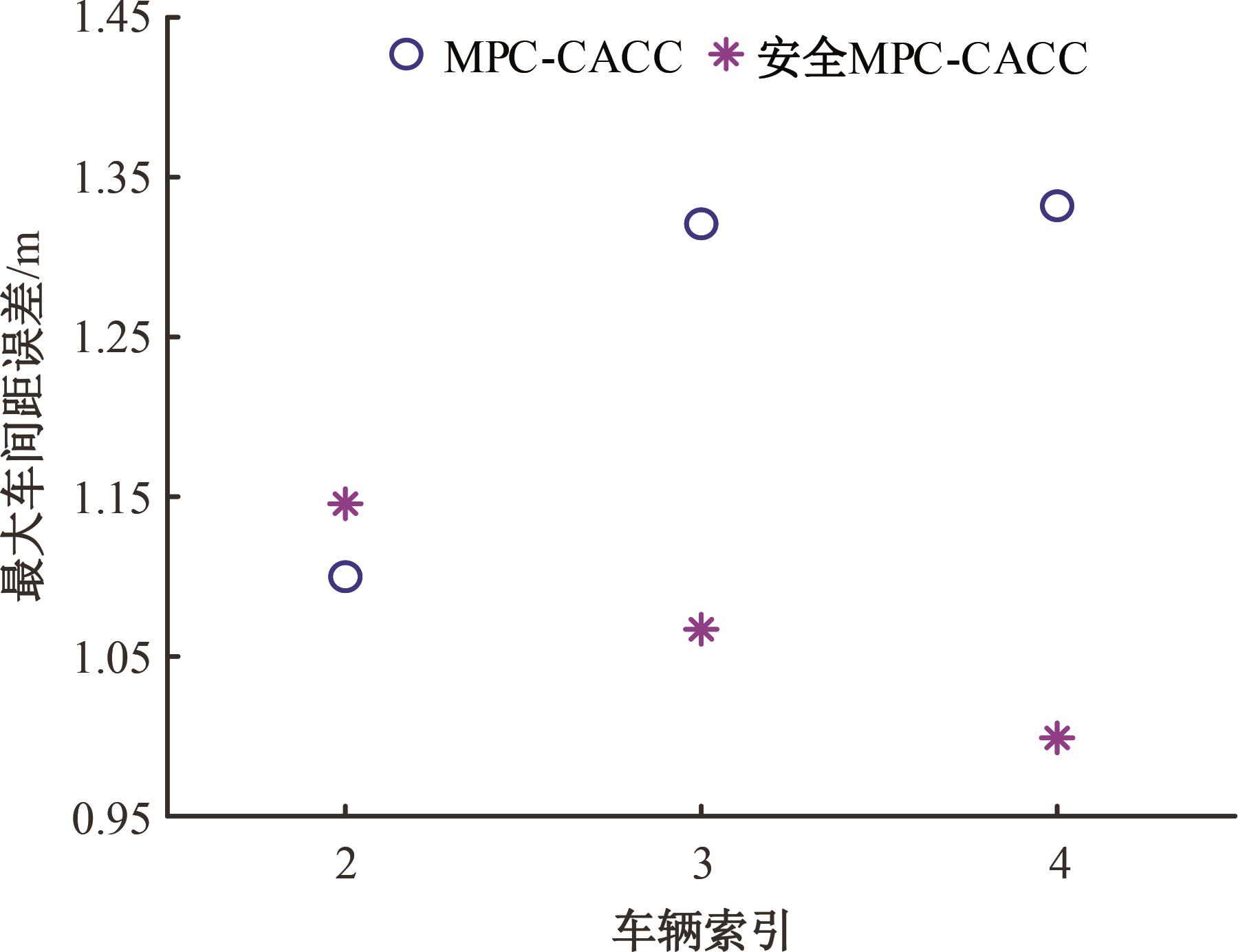
针对受约束网联车队受到加速度拒绝服务(DoS)攻击的情况,提出一种新的安全协同自适应预测巡航控制算法。首先,结合运动学特征设计加速度估计器以缓解DoS攻击对巡航控制器的影响,再设计特定的综合轨迹信号以灵活表示网联车队的各种交通工况。其次,采用滚动时域优化原理和分布式模型预测控制(MPC)框架,提出满足安全约束的车辆队列安全协同自适应预测巡航控制策略。在此基础上,采用线性矩阵不等式方法,给出在安全约束和加速度DoS攻击下的队列稳定性和弦稳定性的充分条件。最后,通过典型交通场景仿真验证本文算法的有效性。
中图分类号:
- TP273

| 1 | Dey K C, Yan L, Wang X, et al. A review of communication, driver characteristics, and controls aspects of cooperative adaptive cruise control(CACC)[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 491-509. |
| 2 | 林亨,方华建,吴冬雁. 基于动态安全距离的CACC车辆混合交通流模型[J]. 北京交通大学学报, 2022, 46(6): 36-42. |
| Lin Heng, Fang Hua-jian, Wu Dong-yan. CACC vehicle mixed traffic flow model based on dynamic safety distance[J]. Journal of Beijing Jiaotong University, 2022, 46(6): 36-42. | |
| 3 | Ghasemi A, Kazemi R, Azadi S. Stable decentralized control of a platoon of vehicles with heterogeneous information feedback[J]. IEEE Transactions on Vehicle Technology, 2013, 62(9): 4299-4308. |
| 4 | Firooznia A, Ploeg J, Wouw N, et al. Co-design of controller and communication topology for vehicular platooning[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(10): 2728-2739. |
| 5 | 田彬, 姚柯, 王孜健, 等. 基于模型预测控制的CACC系统通信延时补偿方法[J]. 交通运输工程学报, 2022, 22(4): 361-381. |
| Tian Bin, Yao Ke, Wang Zi-jian, et al. Communication delay compensation method of CACC platooning system based on model predictive control[J]. Journal of Traffic and Transportation Engineering, 2022, 22(4): 361-381. | |
| 6 | Zabat M, Stabile N, Farascaroli S, et al. The aerodynamic performance of platoons: a final report[R]. Lafayette: Path Research Report, 1995. |
| 7 | Kenney J B. Dedicated short-range communications (DSRC) standards in the united states[J]. Proceedings of the IEEE, 2011, 99(7): 1162-1182. |
| 8 | Wang D, Sattiraju R, Qiu A, et al. Effect of retransmissions on the performance of C-V2X communication for 5G[C]∥ 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, Canada, 2020: 1-7. |
| 9 | Öncü S, Ploeg J, Wouw N, et al. Cooperative adaptive cruise control: network-aware analysis of string stability[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(4): 1527-1537. |
| 10 | Hu S L, Yue D, Han Q L, et al. Observer-based event-triggered control for networked linear systems subject to denial-of-service attacks[J]. IEEE Transactions on Cybernetics, 2020, 50(5): 1952-1964. |
| 11 | Malik S, Sun W. Analysis and simulation of cyber attacks against connected and autonomous vehicles[C]∥ 2020 International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, USA, 2020: 62-70. |
| 12 | Singh P K, Tabjul G S, Imran M, et al. Impact of security attacks on cooperative driving use case: CACC platooning[C]∥ TENCON 2018 - 2018 IEEE Region 10 Conference, Jeju, Korea (South), 2018: 138-143. |
| 13 | Alipour F A, Dabaghchian M, Zeng K. Impact of jamming attacks on vehicular cooperative adaptive cruise control systems[J]. IEEE Transactions on Vehicle Technology, 2020, 69(11): 12679-12693. |
| 14 | Biron Z A, Dey S, Pisu P. Real-time detection and estimation of denial of service attack in connected vehicle systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(12): 3893-3902. |
| 15 | Zhang X F, Du H P, Wei J M, et al. High gain observer design for DOS attack detection in CACC platoon[C]∥ 2020 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 2020: 254-259. |
| 16 | Alotibi F, Abdelhakim M. Anomaly detection for cooperative adaptive cruise control in autonomous vehicles using statistical learning and kinematic model[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(6): 3468-3478. |
| 17 | Wyk F, Wang Y, Khojandi A, et al. Real-time sensor anomaly detection and identification in automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(3): 1264-1276. |
| 18 | Arfouch Y A, Yuan S, Baldi S. An adaptive switched control approach to heterogeneous platooning with intervehicle communication losses[J]. IEEE Transactions on Control of Network Systems, 2018, 5(3): 1434-1444. |
| 19 | Mousavinejad E, Yang F, Han Q, et al. Distributed cyber attacks detection and recovery mechanism for vehicle platooning[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(9): 3821-3834. |
| 20 | Ge X H, Yang F W, Han Q L. Distributed networked control systems: a brief overview[J]. Information Sciences, 2017, 380: 117-131. |
| 21 | Segata M, Bloessl B, Joerer S, et al. Toward communication strategies for platooning: simulative and experimental evaluation[J]. IEEE Transactions on Vehicle Technology, 2015, 64(12): 5411-5423. |
| 22 | Liu X, Goldsmith A, Mahal S, et al. Effects of communication delay on string stability in vehicle platoons[C]∥ 2001 IEEE Intelligent Transportation Systems, Oakland, USA, 2001: 625-630. |
| 23 | Ploeg J, Scheepers B T, Nunen E, et al. Design and experimental evaluation of cooperative adaptive cruise control[C]∥ 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, USA, 2011: 260-265. |
| 24 | Naus G J, Vugts R P, Ploeg J, et al. String-stable CACC design and experimental validation: a frequency-domain approach[J]. IEEE Transactions on Vehicle Technology, 2010, 59(9): 4268-4279. |
| 25 | Benslimane A, Huong N. Jamming attack model and detection method for beacons under multichannel operation in vehicular networks[J]. IEEE Transactions on Vehicle Technology, 2017, 66(7): 6475-6488. |
| 26 | Dutta R G, Hu Y, Yu F, et al. Design and analysis of secure distributed estimator for vehicular platooning in adversarial environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(4): 3418-3429. |
| 27 | Liu Y, Pan C, Gao H, et al. Cooperative spacing control for interconnected vehicle systems with input delays[J]. IEEE Transactions on Vehicle Technology, 2017, 66(12): 10692-10704. |
| 28 | Bernardo M, Falcone P, Salvi A, et al. Design, analysis, and experimental validation of a distributed protocol for platooning in the presence of time-varying heterogeneous delays[J]. IEEE Transactions on Control Systems Technology, 2016, 24(2): 413-427. |
| 29 | Dumitrescu B. Bounded real lemma for FIR MIMO systems[J]. IEEE Signal Processing Letters, 2005, 12(7): 496-499. |
| 30 | He Y, Wu M, She J H. Improved bounded-real-lemma representation and H∞ control of systems with polytopic uncertainties[J]. IEEE Transactions on Circuits and Systems II-Express Briefs, 2005, 52(7): 380-383. |
| 31 | Feng L, Wang J, Poh E, et al. Multi-objective robust model predictive control: trajectory tracking problem through LMI formulation[C]∥ American Control Conference, New York, USA, 2007: 5589-5594. |
| 32 | Boyd S, Vandenberghe L. Convex Optimization[M]. Cambridge: Cambridge University Press, 2004. |
| 33 | Luo J, He D F, Zhu W, et al. Multiobjective platooning of connected and automated and vehicles using distributed economic model predictive control[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 19121-19135. |
| 34 | Zhu Y H, He H B, Zhao D B. LMI-based synthesis of string-stable controller for cooperative adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(11): 4516-4525. |
| [1] | 李寿涛,杨路,屈如意,孙鹏鹏,于丁力. 基于模型预测控制的滑移率控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2687-2696. |
| [2] | 郭洪艳,张家铭,刘俊,胡云峰. 面向智能汽车-行人交互的虚拟测试场景构建[J]. 吉林大学学报(工学版), 2024, 54(9): 2511-2519. |
| [3] | 鲜斌,王印鑫,王岭. 无人机集群分布式跟踪抗扰控制设计与实验验证[J]. 吉林大学学报(工学版), 2024, 54(7): 2093-2103. |
| [4] | 赵靖华,张雨彤,曹派,王忠恕,李小平,孙亚南,解方喜. 压缩天然气发动机增程式电动汽车能量管理优化[J]. 吉林大学学报(工学版), 2024, 54(3): 600-609. |
| [5] | 李文航,倪涛,赵丁选,邓英杰,师小波. 基于模型预测反馈技术的救援车辆液压悬挂系统控制方法[J]. 吉林大学学报(工学版), 2024, 54(3): 610-619. |
| [6] | 江和耀,王永海,吴幼冬,王萍. 四轮毂驱动电动车辆横向稳定与侧倾预防协同控制策略[J]. 吉林大学学报(工学版), 2024, 54(2): 540-549. |
| [7] | 刘果,熊坚,杨秀建,何扬帆. 基于曲率增广的智能车辆轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(12): 3717-3728. |
| [8] | 刘刚,范群,杨旭,任宏斌. 无人驾驶汽车变速换道轨迹跟踪动态控制[J]. 吉林大学学报(工学版), 2024, 54(12): 3729-3739. |
| [9] | 蒋渊德,欧阳铭,赵祥模,秦孔建,郑兵兵. 车辆纵侧向辅助驾驶集成优化控制策略[J]. 吉林大学学报(工学版), 2024, 54(10): 2741-2753. |
| [10] | 李寿涛,李嘉霖,孟庆瑜,郭洪艳. 基于点云直方图的回环检测算法和车辆定位方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2395-2403. |
| [11] | 申富媛,李炜,蒋栋年. 四旋翼无人机寿命预测和自主维护方法[J]. 吉林大学学报(工学版), 2023, 53(3): 841-852. |
| [12] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [13] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [14] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [15] | 孙耀,胡云峰,周杰敏,程欢,曲婷,赵靖华,陈虹. 基于分层控制器的SCR系统滚动时域优化控制方法[J]. 吉林大学学报(工学版), 2023, 53(1): 61-71. |
|
||