吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (10): 2741-2753.doi: 10.13229/j.cnki.jdxbgxb.20221134
• 车辆工程·机械工程 • 下一篇
车辆纵侧向辅助驾驶集成优化控制策略
蒋渊德1( ),欧阳铭1,赵祥模1,秦孔建2(),郑兵兵3
),欧阳铭1,赵祥模1,秦孔建2(),郑兵兵3
- 1.长安大学 信息工程学院,西安 710016
2.中国汽车技术研究中心有限公司,天津 300300
3.中航光电科技股份有限公司,河南 洛阳 471000
Optimal integrated control of longitudinal and lateral driving assistance systems
Yuan-de JIANG1(),Ming OUYANG1,Xiang-mo ZHAO1,Kong-jian QIN2(),Bing-bing ZHENG3
- 1.School of Information Engineering,Chang′an University,Xi'an 710016,China
2.China Automotive Technology and Research Center,Tianjin 300300,China
3.AVIC Jonhon Optronic Technology Co. ,Ltd. ,Luoyang 471000,China
摘要:
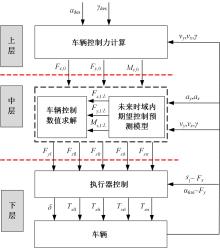
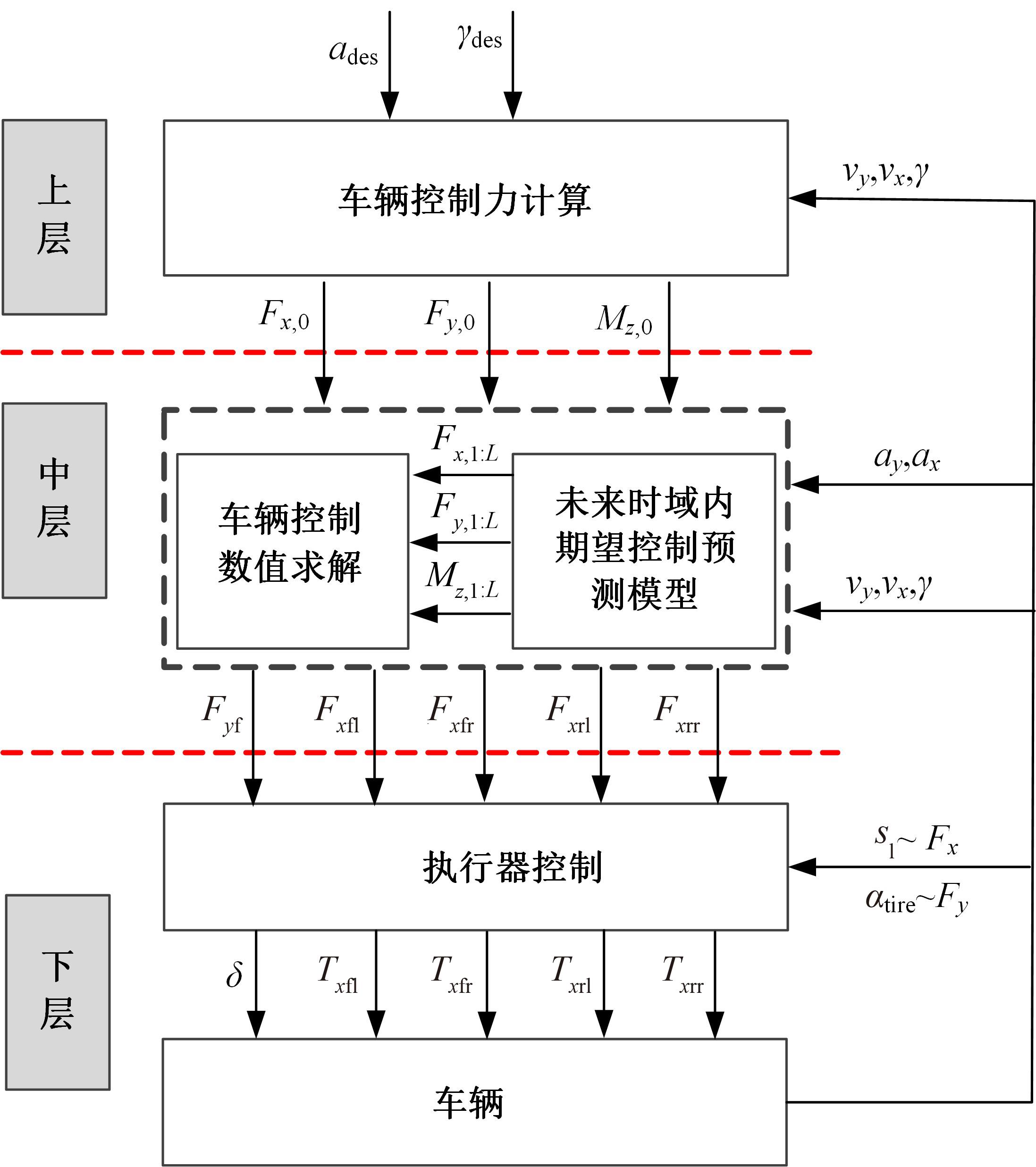
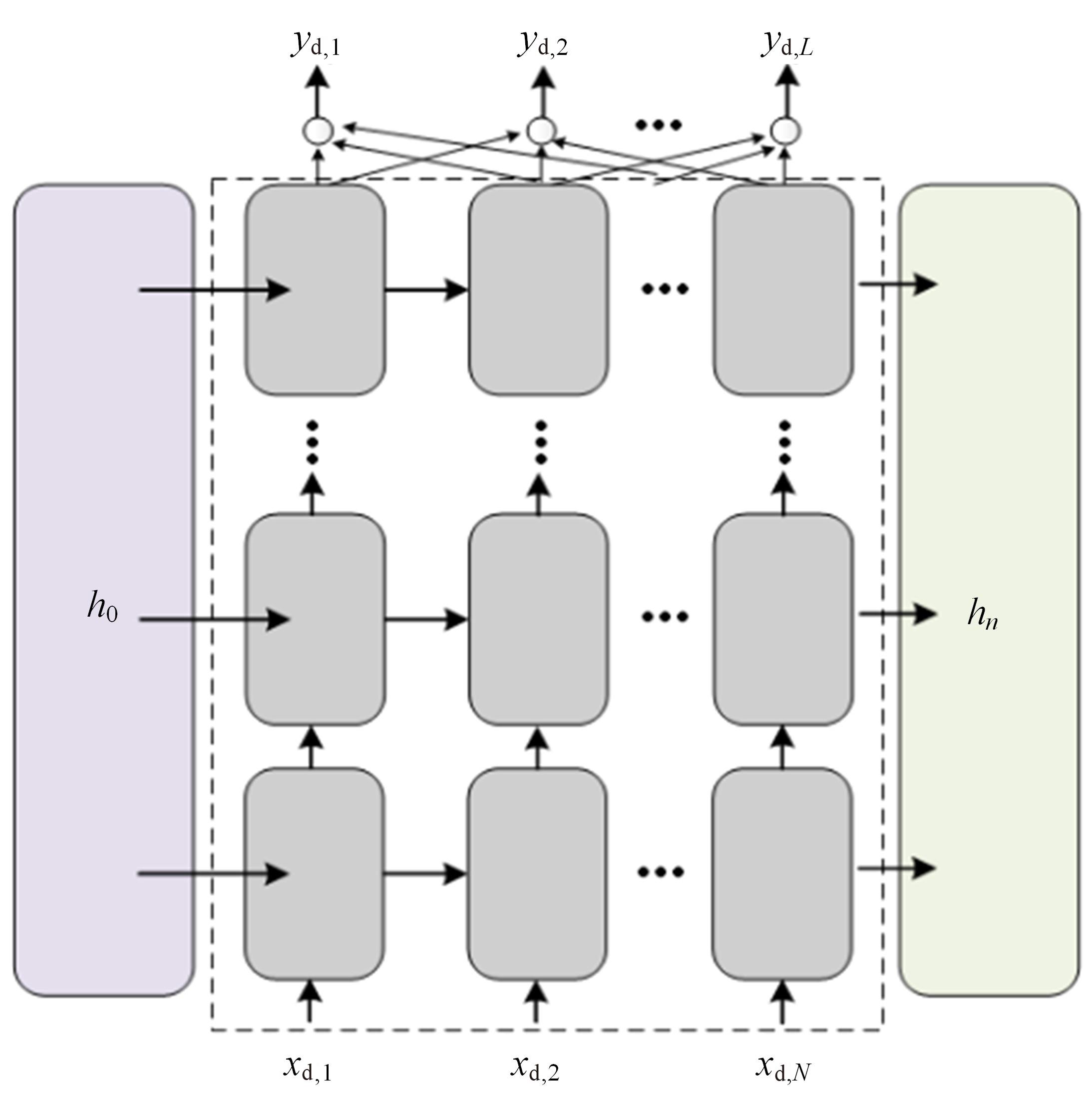
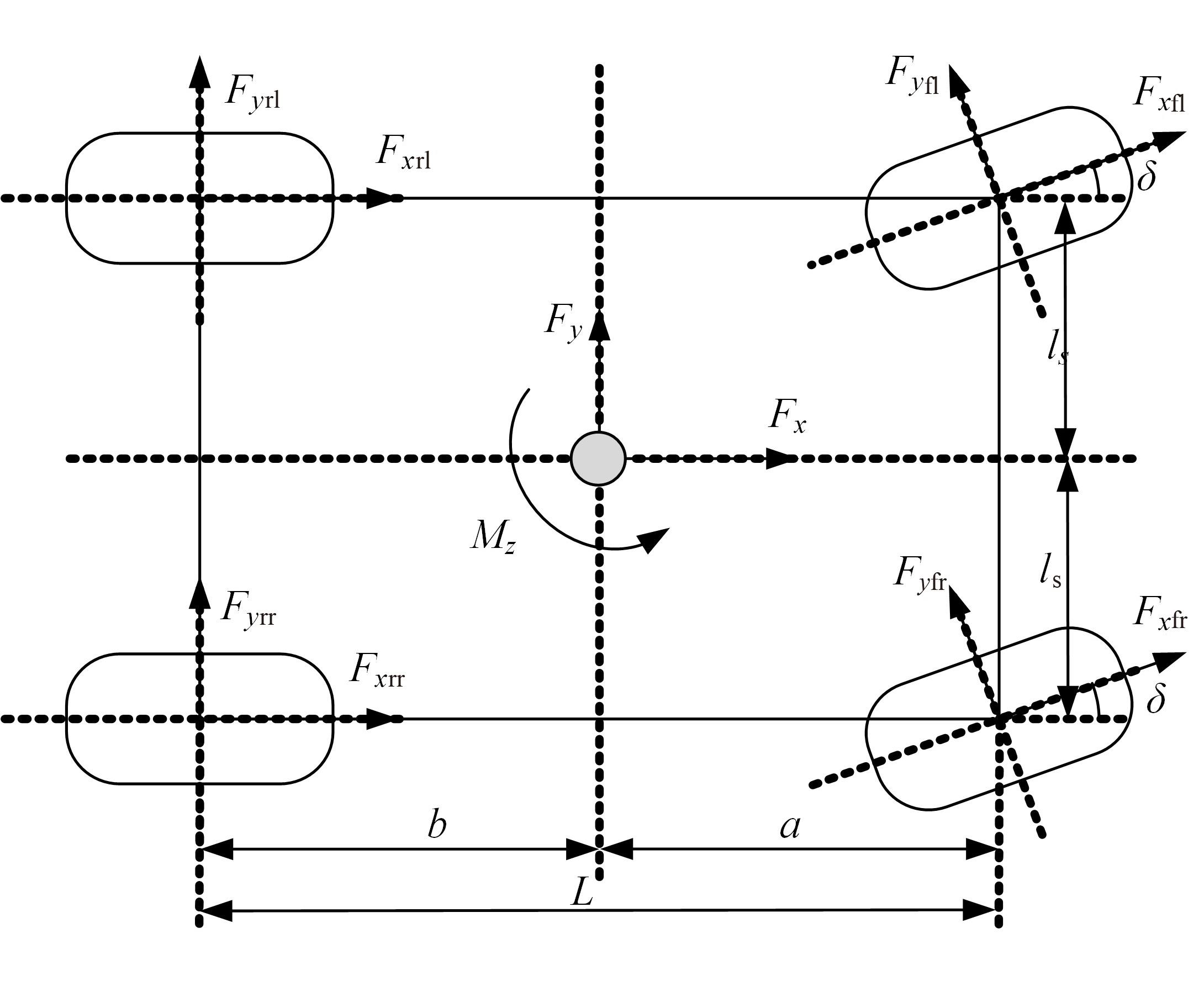
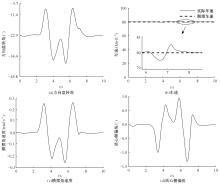
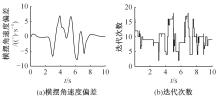
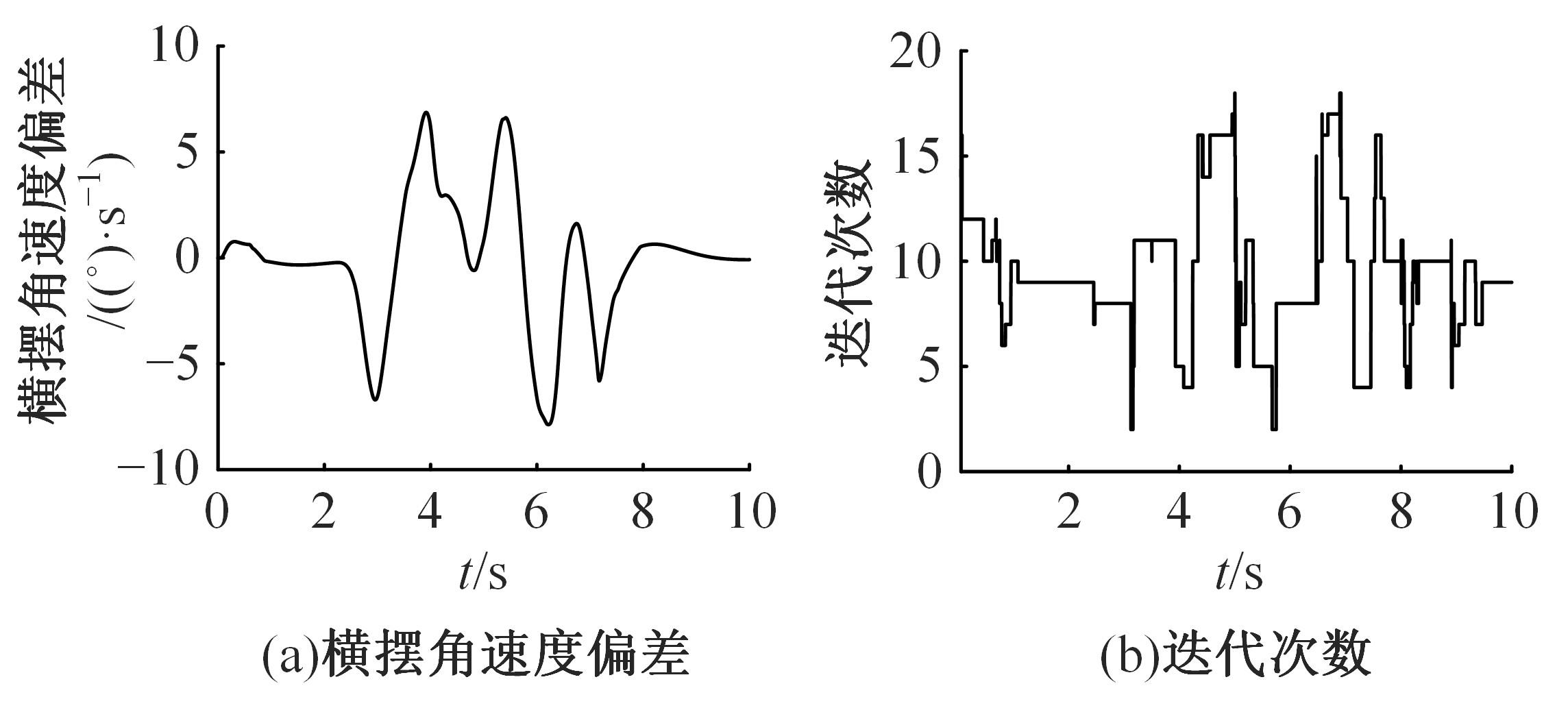
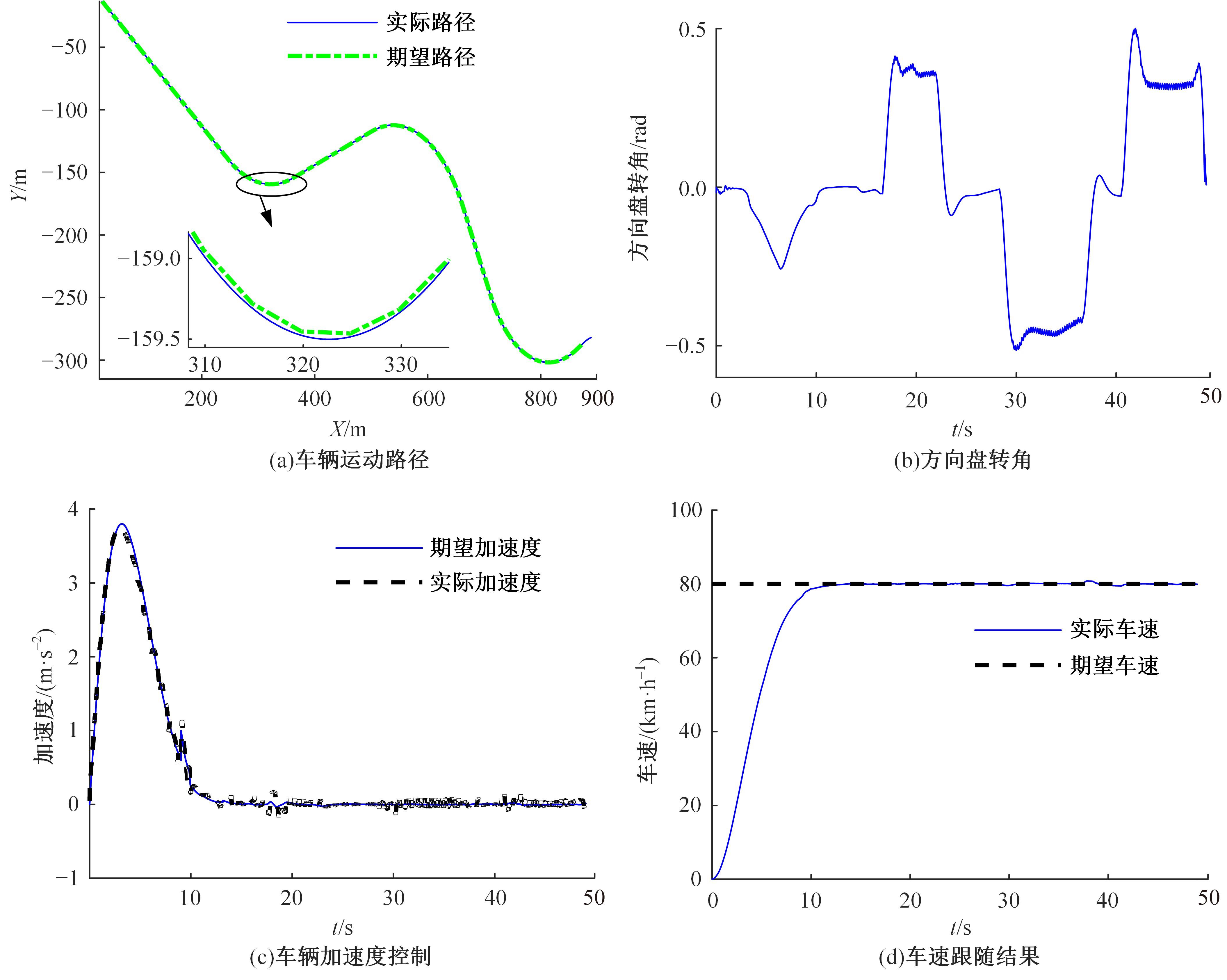
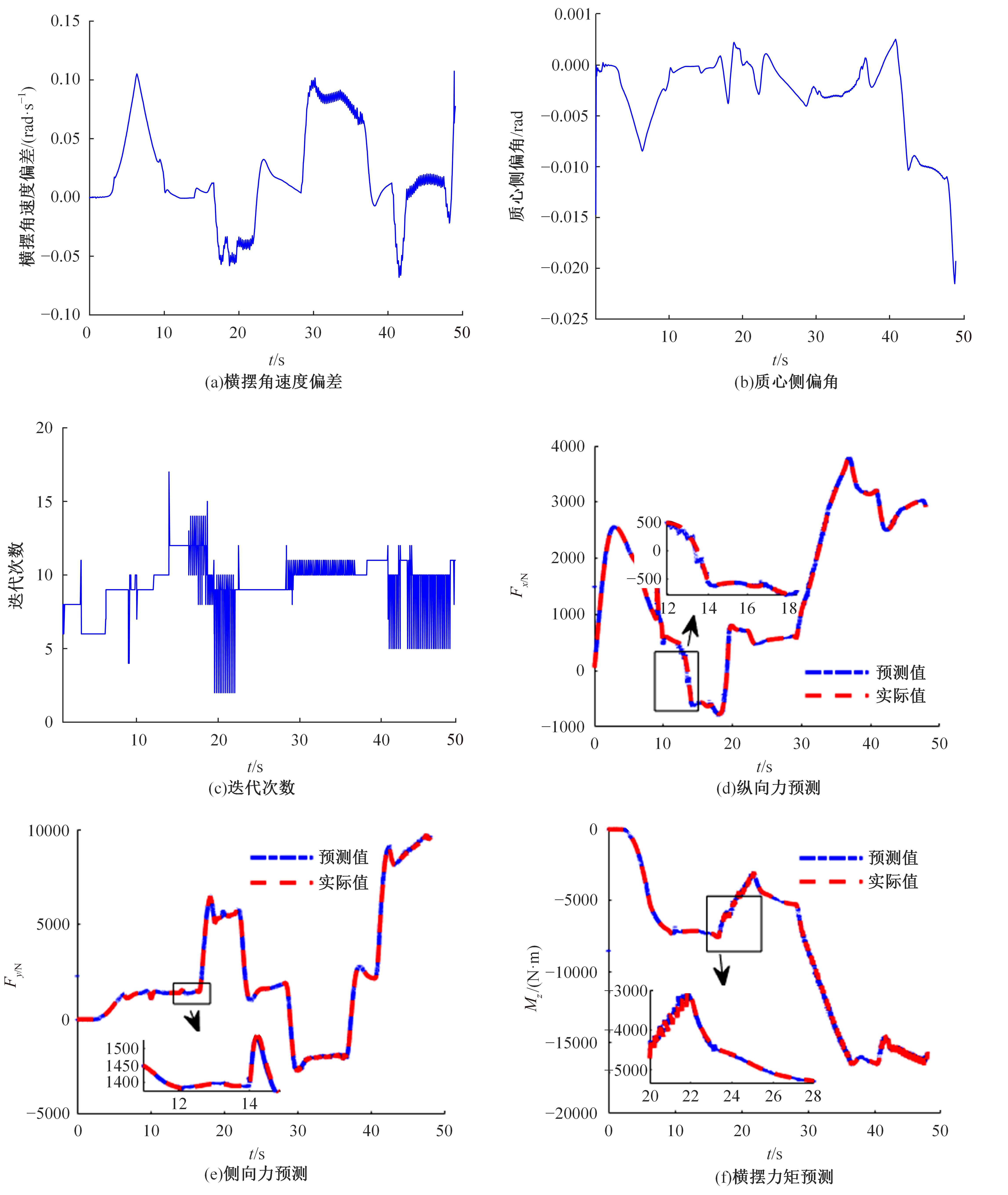
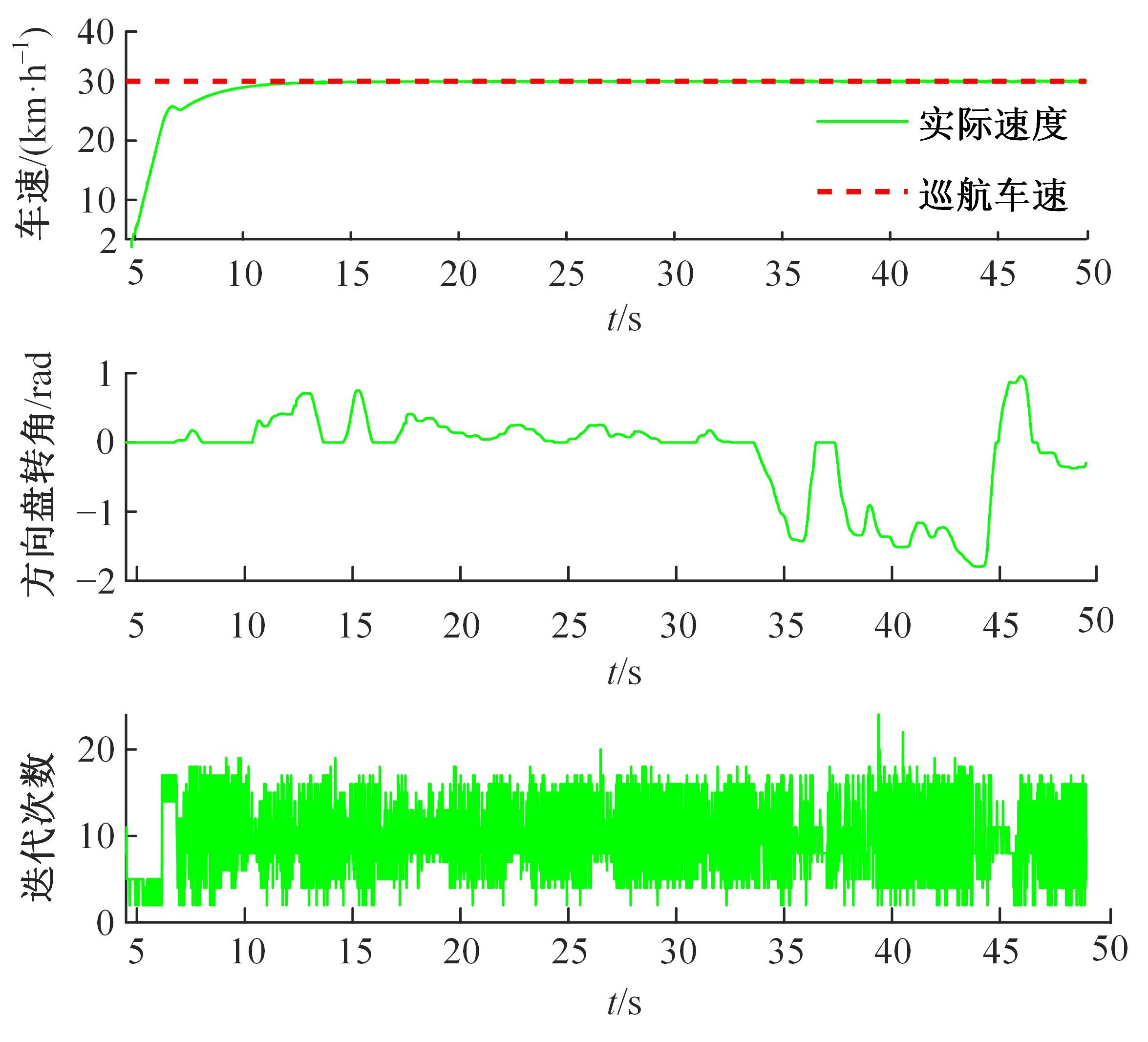
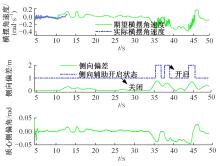
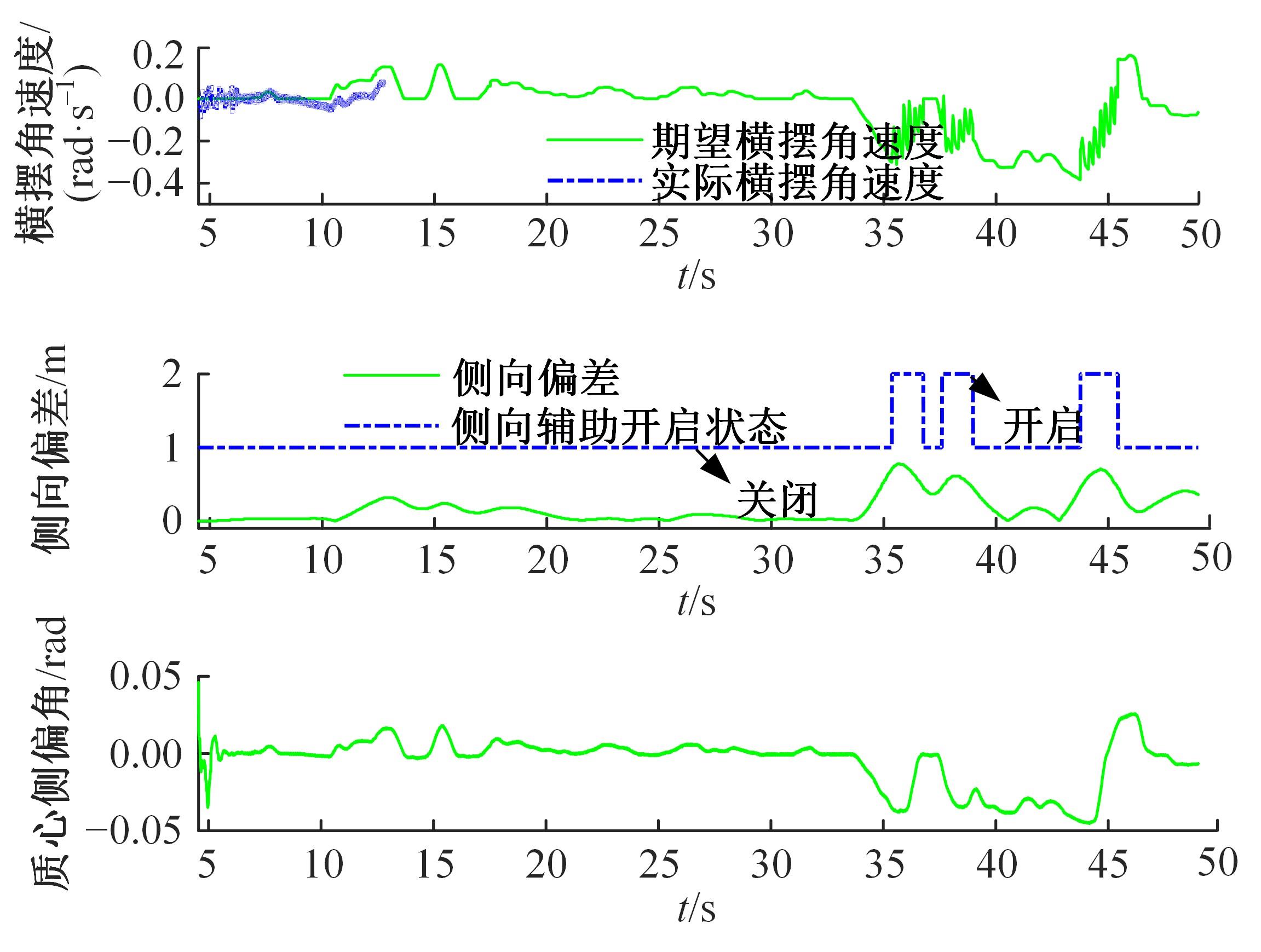
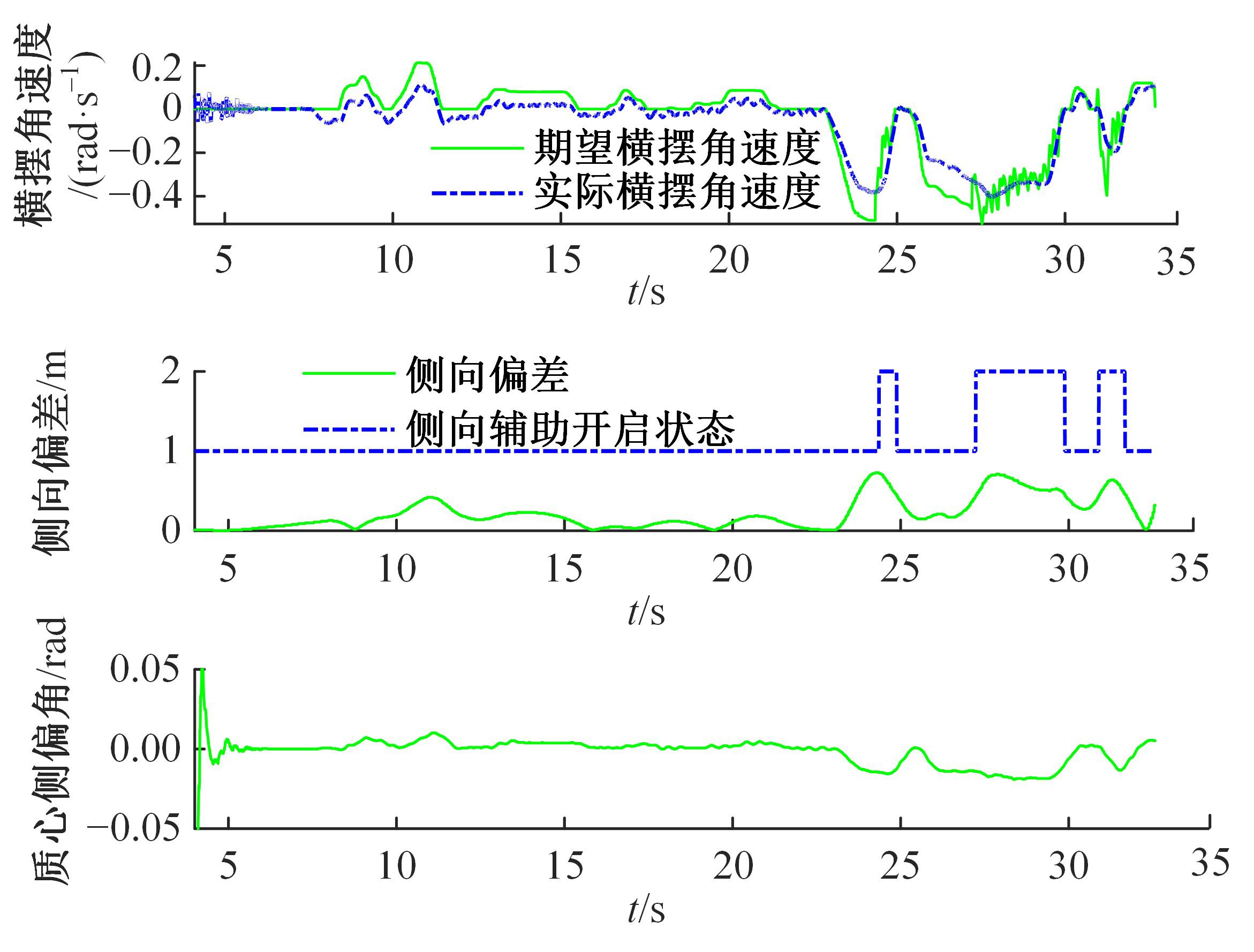
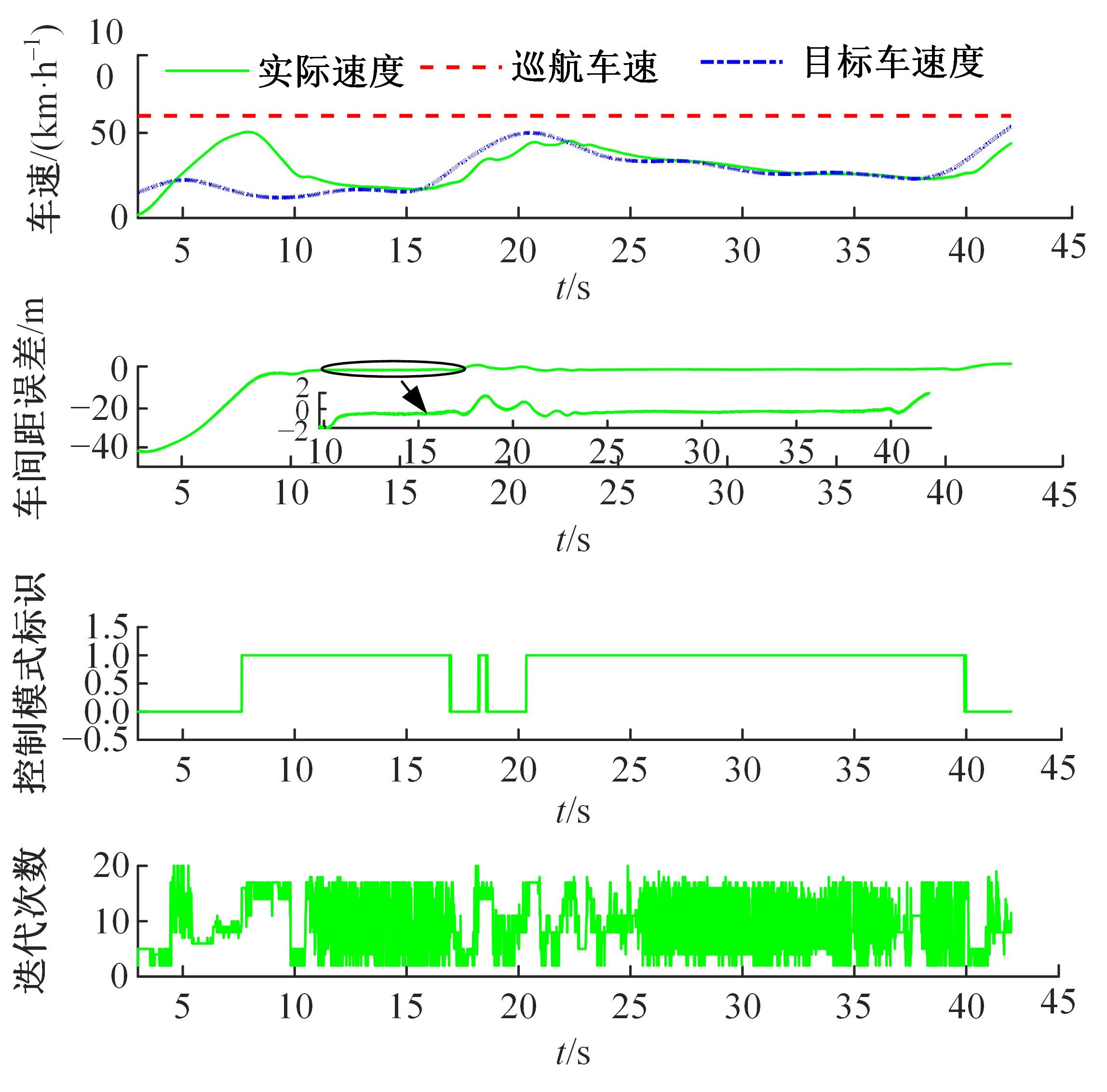
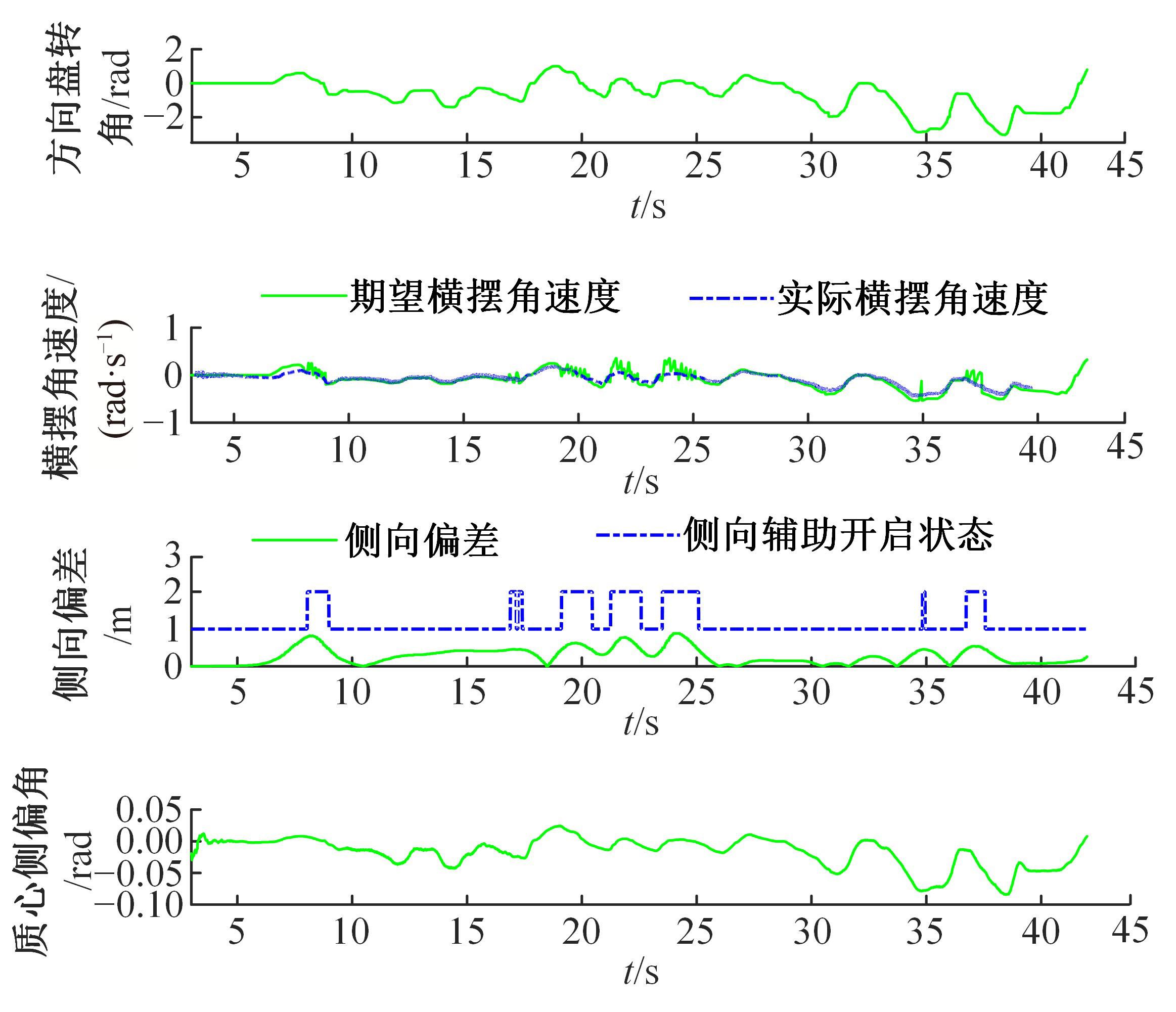
为协调汽车纵、侧向辅助驾驶系统控制目标和车辆动力学控制需求,以四轮独立驱动电动汽车为控制对象,结合深度学习和模型预测控制建立车辆广义控制力预测-动力学优化分配控制策略。上层算法根据纵、侧向辅助驾驶策略参考目标计算满足车辆控制需求的广义控制力;中层模块包括车辆期望广义力神经网络预测模型和主动集数值求解算法两部分;下层根据期望轮胎力计算轮胎滑移率和侧偏角,通过控制电机扭矩和制动系统实现轮胎力控制需求,通过转向系统调节车辆运动方向。采用仿真测试和硬件在环试验对算法进行验证,结果表明:所建算法能够同时保证车辆纵向和侧向的控制需求,侧向路径跟随误差为0.011 7 m,车速误差为0.59 km/h。
中图分类号:
- U471.1









| 1 | Luu L D, Lupu C, Alshareefi H D. A comparative study of adaptive cruise control system based on different spacing strategies[J]. Journal of Control Engineering and Applied Informatics, 2022, 24(2): 3-12. |
| 2 | 赵超, 卜德旭, 曹礼鹏, 等. 强降雨场景下自适应巡航控制系统的安全控制策略[J]. 汽车工程, 2022, 44(8): 1117-1125, 1236. |
| Zhao Chao, Bu De-xu, Cao Li-peng,et al. Safety control strategy for adaptive cruise control system in heavy rainfall scenes[J]. Automotive Engineering, 2022, 44(8): 1117-1125, 1236. | |
| 3 | 吴光强, 张亮修, 刘兆勇, 等.汽车自适应巡航控制系统研究现状与发展趋势[J]. 同济大学学报: 自然科学版, 2017 (4): 544-553. |
| Wu Guang-qiang, Zhang Liang-xiu, Liu Zhao-yong, et al. Research status and development trend of vehicle adaptive cruise control system[J]. Journal of Tongji University (Nature Science), 2017 (4): 544-553. | |
| 4 | 吴乙万.人机协同下的车道偏离辅助驾驶关键技术研究[D].长沙:湖南大学机械与运载工程学院,2013. |
| Wu Yi-wan.Research on key technologies of lane departure driving assistance system based on human-machine cooperation[D]. Changsha:College of Mechanical and Vehicle Engineering,Hunan University, 2013. | |
| 5 | Dikmen M, Burns C M. Autonomous driving in the real world: experiences with tesla autopilot and summon[C]∥Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular applications. New York:ACM, 2016: 225-228. |
| 6 | Cadillac. Designed to take your hands and breath away [EB/OL]. [2022-07-12]. . |
| 7 | Becker J, Colas M B A, Nordbruch S, et al. Bosch's vision and roadmap toward fully autonomous driving[M]. Berlin:Springer,2014. |
| 8 | Guo C, Meguro J, Kojima Y, et al. CADAS: a multimodal advanced driver assistance system for normal urban streets based on road context understanding[C]∥Intelligent Vehicles Symposium,Gold Coast,Australia,2013. |
| 9 | Xu X, Grizzle J W, Tabuada P, et al. Correctness guarantees for the composition of lane keeping and adaptive cruise control[J]. IEEE Transactions on Automation Science & Engineering, 2016(99):1-14. |
| 10 | Yokoyama A, Raksincharoensak P, Yoshikawa N. Integrated steering and braking control system for collision avoidance by using virtual repulsive force field method[C]∥ASME 2018 Dynamic Systems and Control Conference.New York: American Society of Mechanical Engineers, 2018: No.V002T22A001-V002T22 A001. |
| 11 | Lin T C, Ji S, Dickerson C E, et al. Coordinated control architecture for motion management in ADAS systems[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(2): 432-444. |
| 12 | Németh B. Coordination of lateral vehicle control systems using learning-based strategies[J]. Energies, 2021, 14(5): No.1291. |
| 13 | Enache N M, Netto M, Mammar S, et al. Driver steering assistance for lane departure avoidance[J]. Control Engineering Practice, 2009, 17(6):642-651. |
| 14 | Chen L K, Shieh B J. Coordination of the authority between the vehicle driver and a steering assist controller[J]. WSEAS Trans Syst Control, 2008, 3(5): 353-364. |
| 15 | Zhou Y Z, Wang R C, Ding R K, et al. Investigation on hierarchical control for driving stability and safety of intelligent HEV during car-following and lane-change process[J]. Science China Technological Sciences, 2022, 65(1): 53-76. |
| 16 | Wang H, Sun Y, Gao Z, et al. Extension coordinated multi-objective adaptive cruise control integrated with direct yaw moment control[C]∥Actuators. MDPI, 2021, 10(11):No.295. |
| 17 | Lin T C, Ji S, Dickerson C E, et al. Coordinated control architecture for motion management in ADAS systems[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(2): 432-444. |
| 18 | Zhu B, Jiang Y, Zhao J, et al. Typical-driving-style-oriented personalized adaptive cruise control design based on human driving data[J]. Transportation Research Part C: Emerging Technologies, 2019, 100: 274-288. |
| [1] | 李寿涛,杨路,屈如意,孙鹏鹏,于丁力. 基于模型预测控制的滑移率控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2687-2696. |
| [2] | 吴量,顾义凡,邢彪,马芳武,倪利伟,贾微微. 基于线性二次型调节器的四轮转向与分布式集成控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2414-2422. |
| [3] | 王玉海,李晓之,李兴坤. 面向高速工况的混合动力卡车预见性节能算法[J]. 吉林大学学报(工学版), 2024, 54(8): 2121-2129. |
| [4] | 常胜,刘宏飞,邹乃威. 汽车变曲率路径循迹H∞回路成形鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(8): 2141-2148. |
| [5] | 刘建泽,柳江,李敏,章新杰. 基于最小二乘的车速解耦路面辨识方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1821-1830. |
| [6] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [7] | 刘从臻,陈高,刘洪柱,马强,徐成伟,孟辉,王国林. 湿滑路面轮胎接地力学特性模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1501-1511. |
| [8] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
| [9] | 郭洪艳,王连冰,赵旭,戴启坤. 考虑侧向运动的整车质量与道路坡度估计[J]. 吉林大学学报(工学版), 2024, 54(5): 1175-1187. |
| [10] | 陆玉凯,袁帅科,熊树生,朱绍鹏,张宁. 汽车漆面缺陷高精度检测系统[J]. 吉林大学学报(工学版), 2024, 54(5): 1205-1213. |
| [11] | 汪少华,张启睿,施德华,殷春芳,李春. 双行星排式混合动力传动系统非线性振动响应特性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 890-901. |
| [12] | 李文航,倪涛,赵丁选,邓英杰,师小波. 基于模型预测反馈技术的救援车辆液压悬挂系统控制方法[J]. 吉林大学学报(工学版), 2024, 54(3): 610-619. |
| [13] | 赵靖华,张雨彤,曹派,王忠恕,李小平,孙亚南,解方喜. 压缩天然气发动机增程式电动汽车能量管理优化[J]. 吉林大学学报(工学版), 2024, 54(3): 600-609. |
| [14] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [15] | 谢宪毅,王禹涵,金立生,赵鑫,郭柏苍,廖亚萍,周彬,李克强. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3): 620-630. |
|