吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 713-725.doi: 10.13229/j.cnki.jdxbgxb20221416
• 通信与控制工程 • 上一篇
低附着路况条件下人车共享转向系统稳定控制
谢波( ),高榕,许富强,田彦涛()
),高榕,许富强,田彦涛()
- 吉林大学 通信工程学院,长春 130022
Stability control of human⁃vehicle shared steering system under low adhesion road conditions
Bo XIE(),Rong GAO,Fu-qiang XU,Yan-tao TIAN()
- College of Communication Engineering,Jilin University,Changchun 130022,China
摘要:
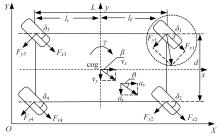
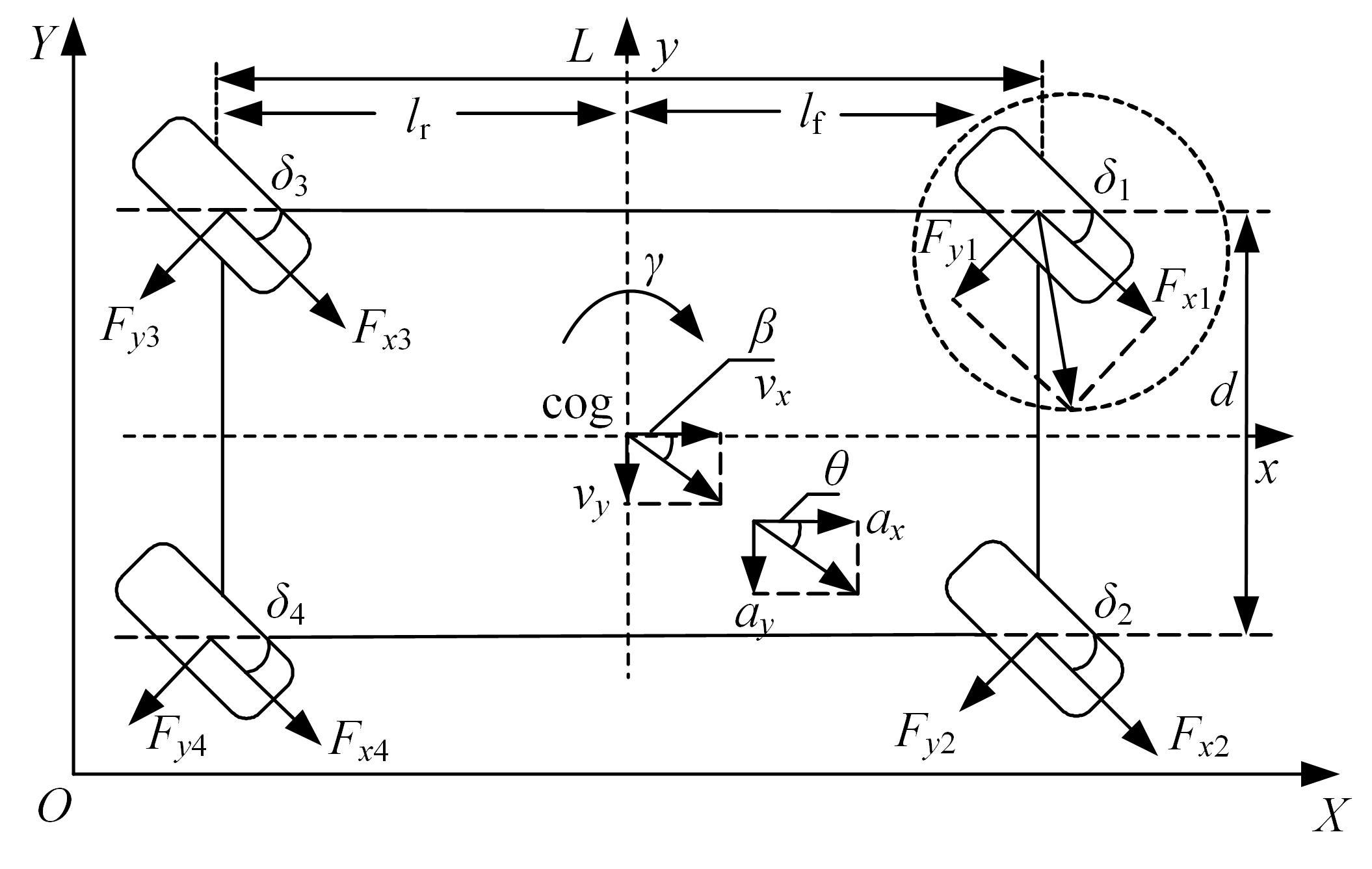
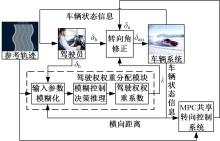
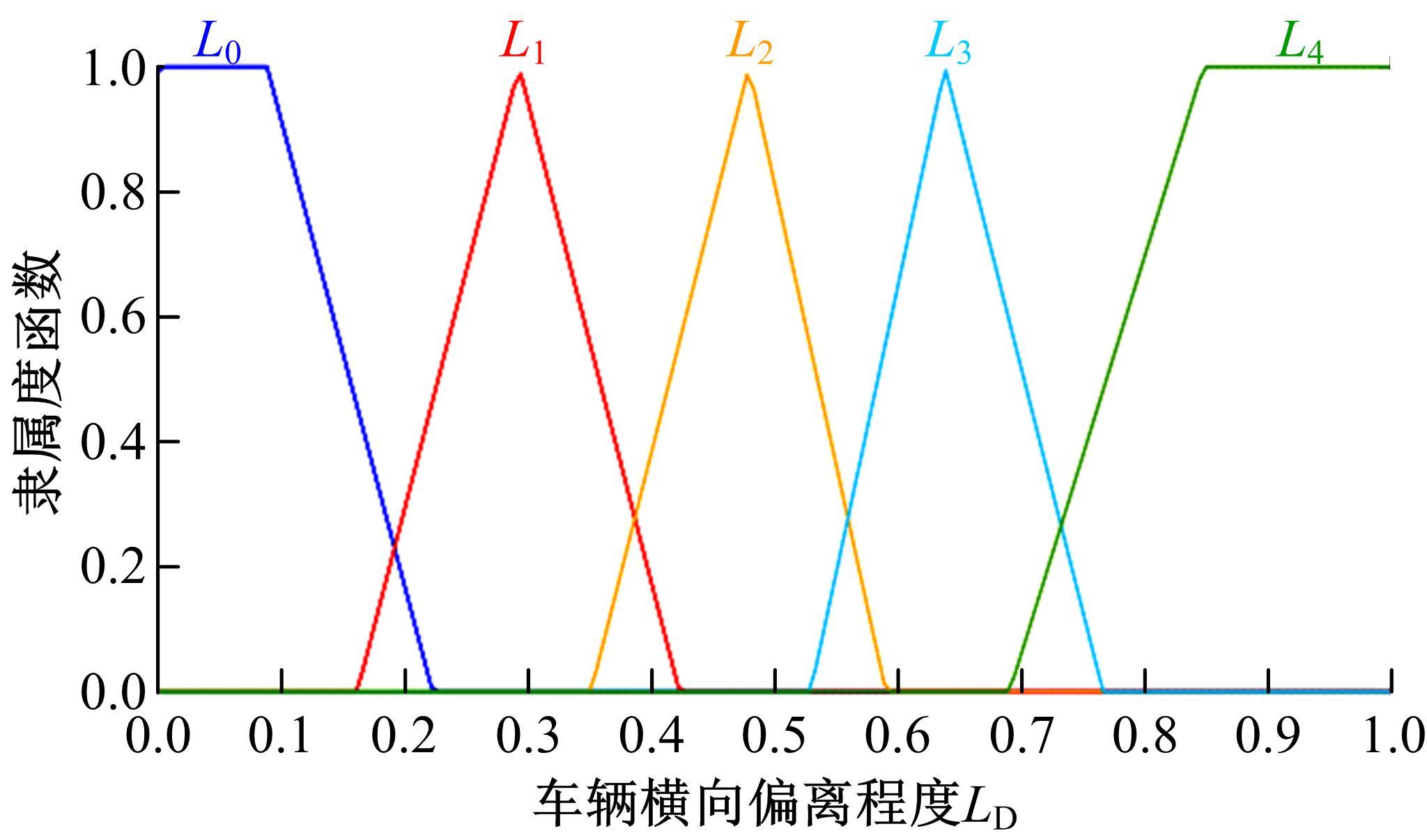
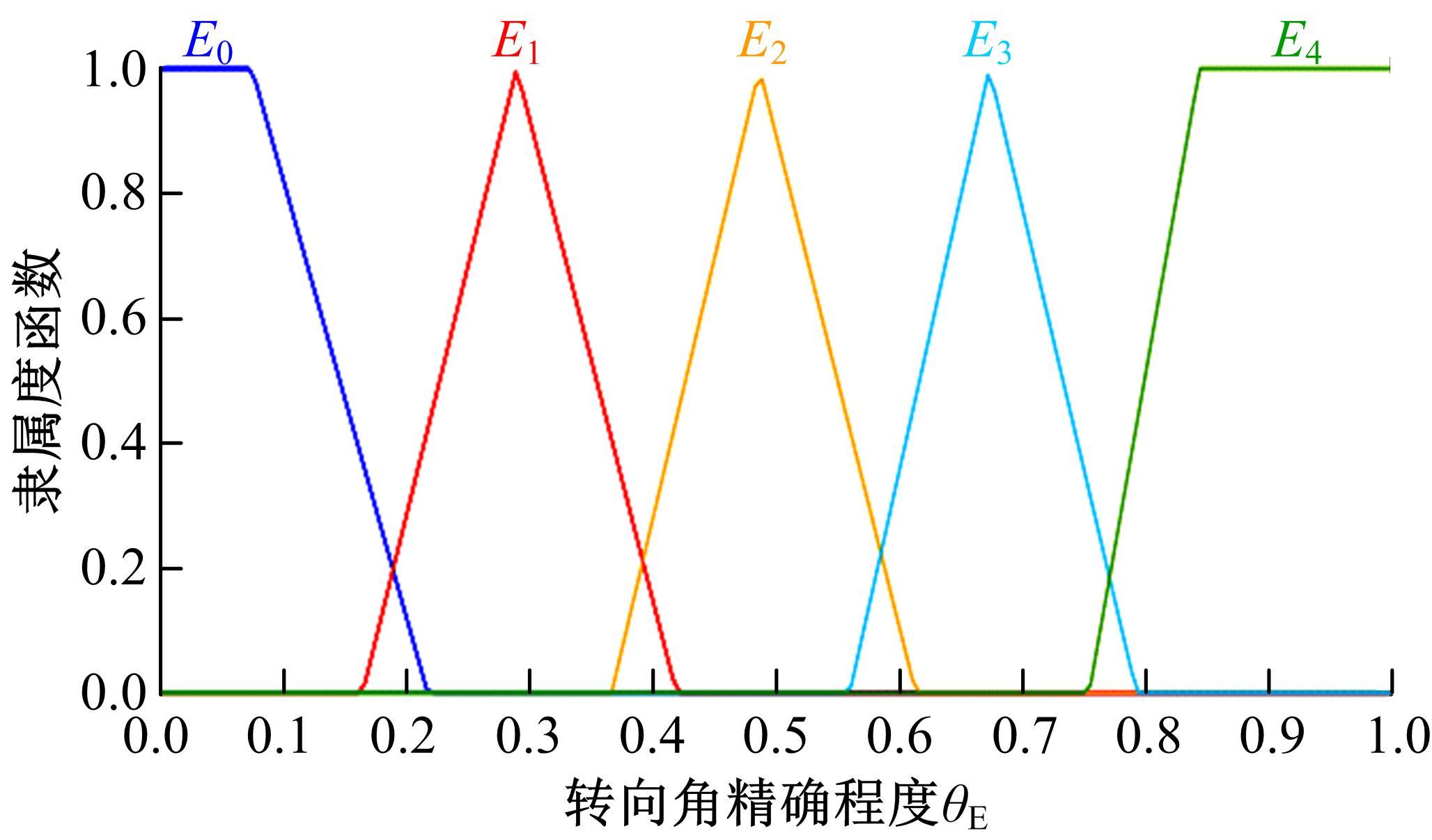
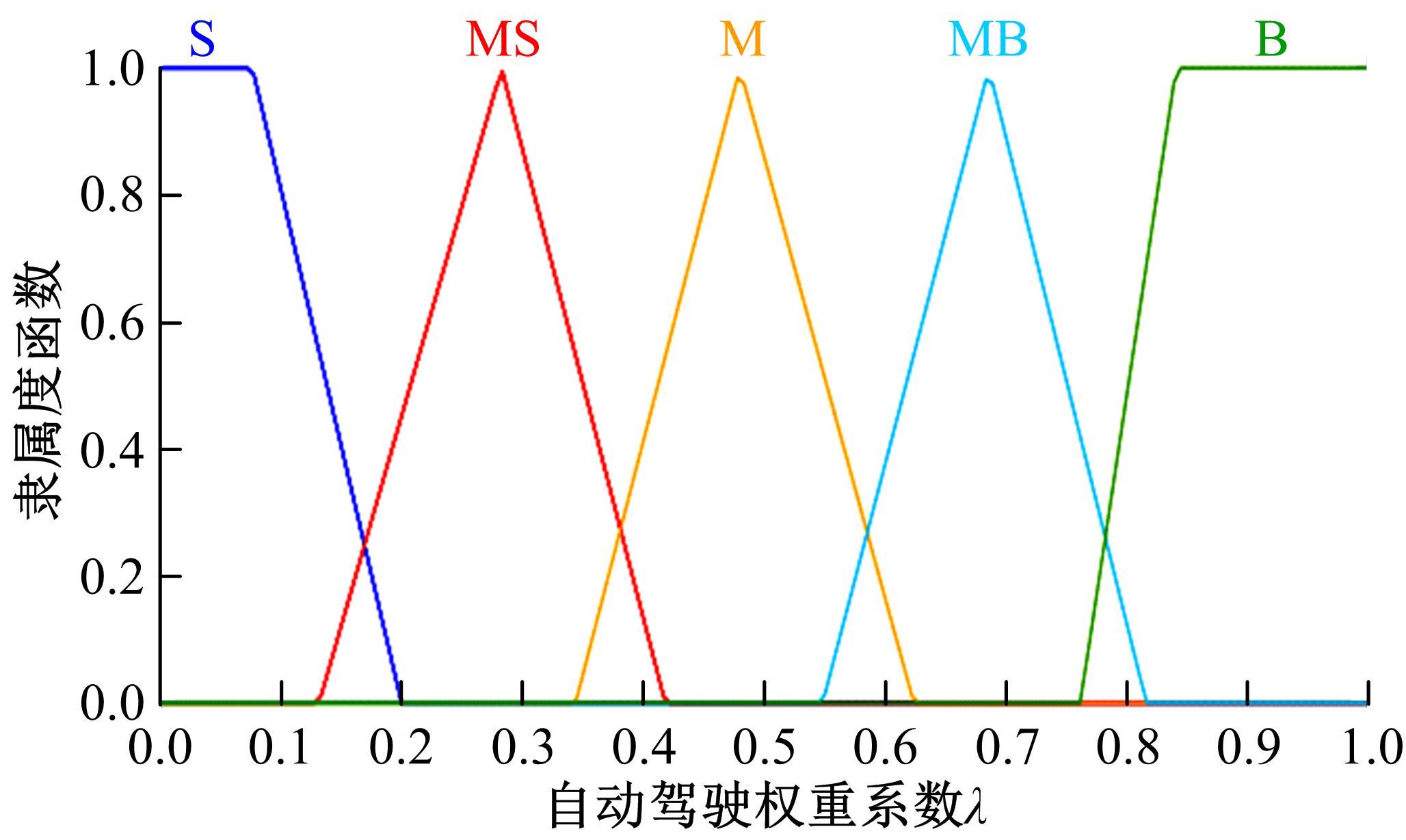
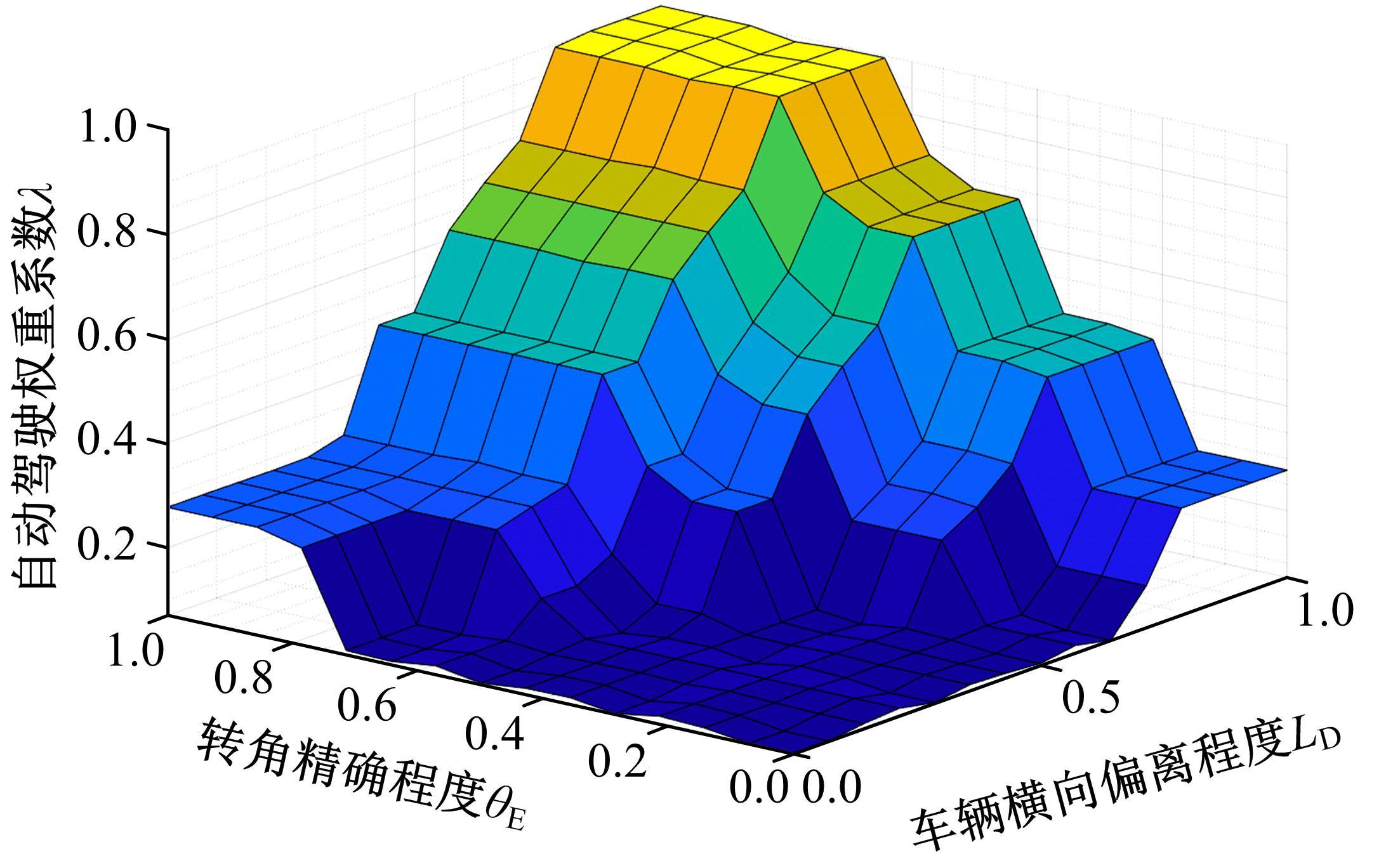
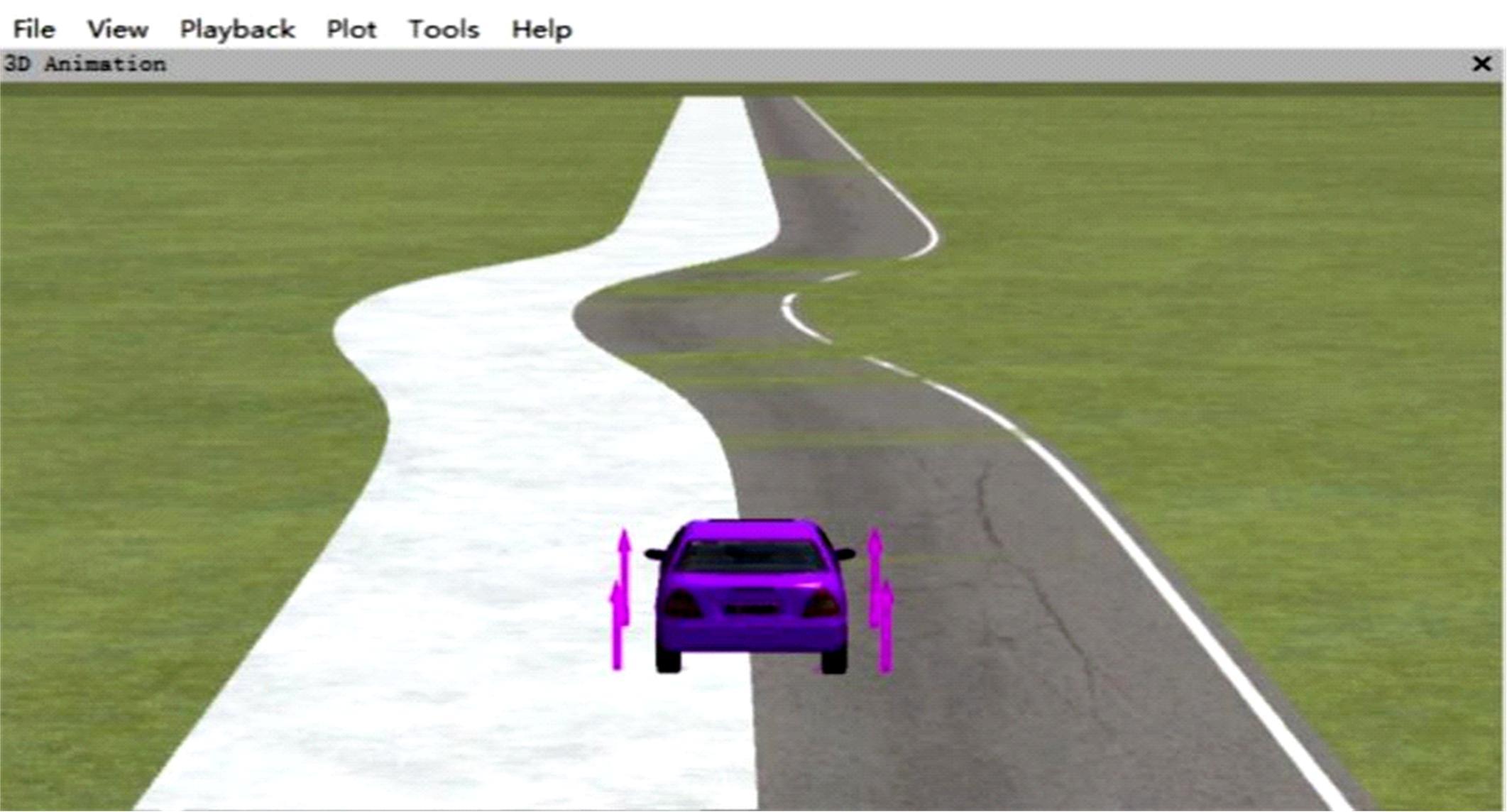
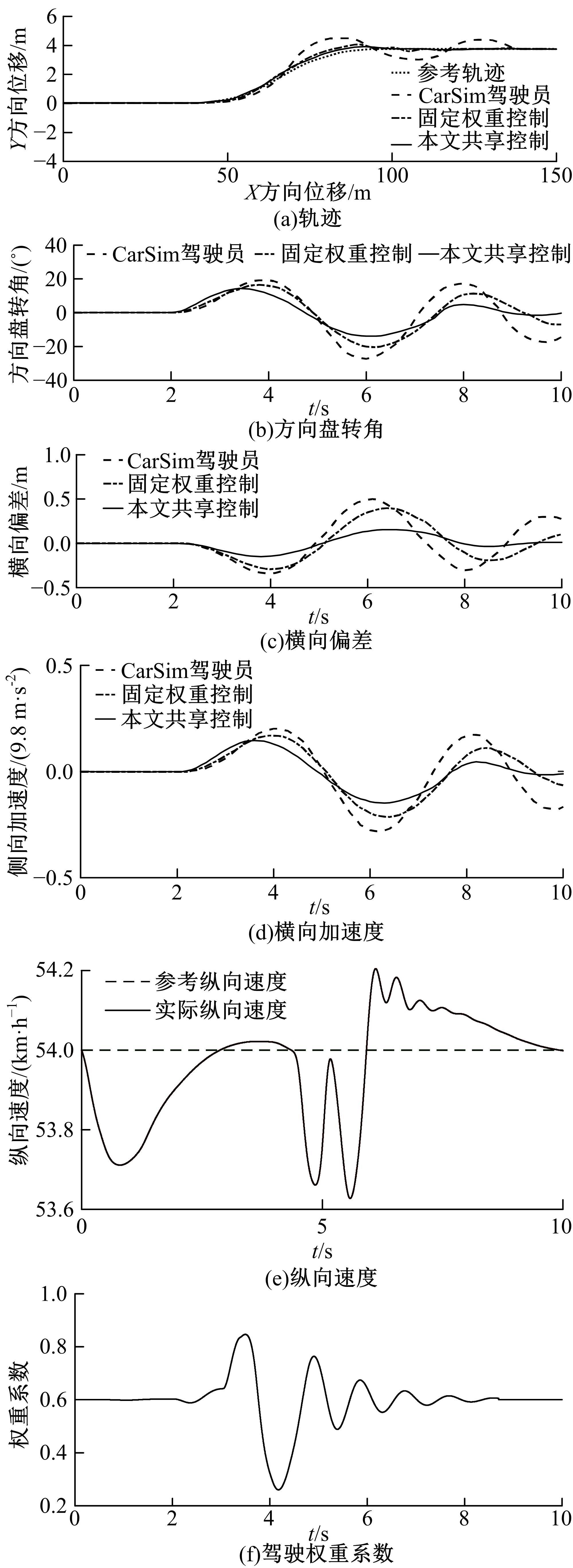
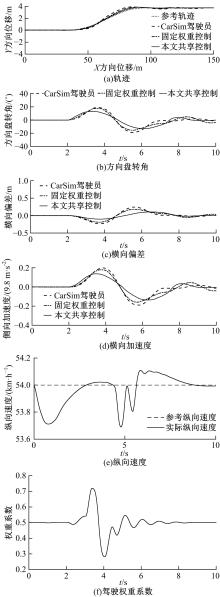
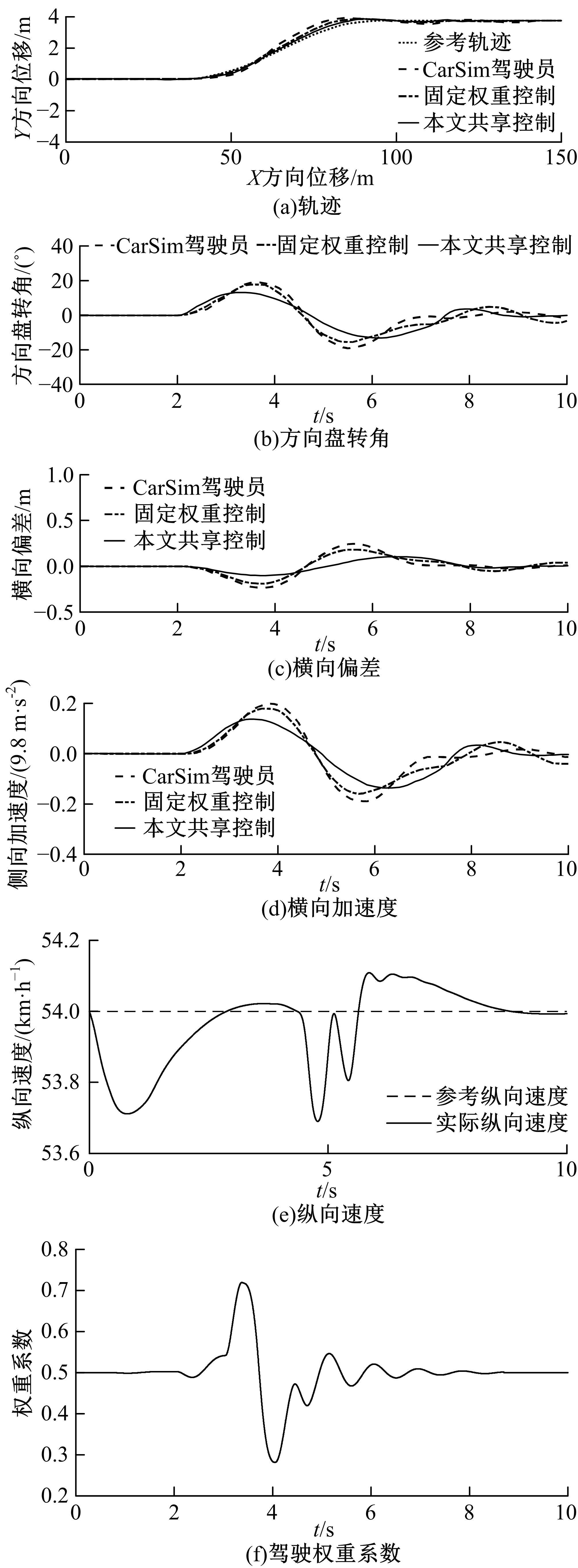
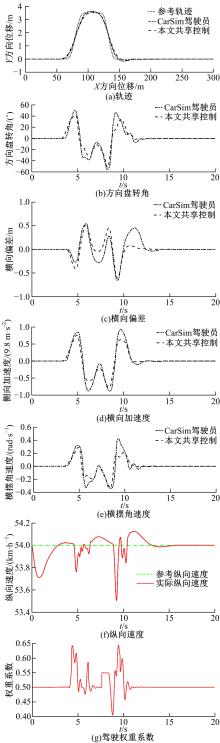
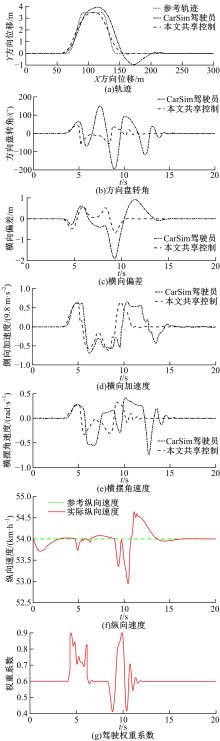
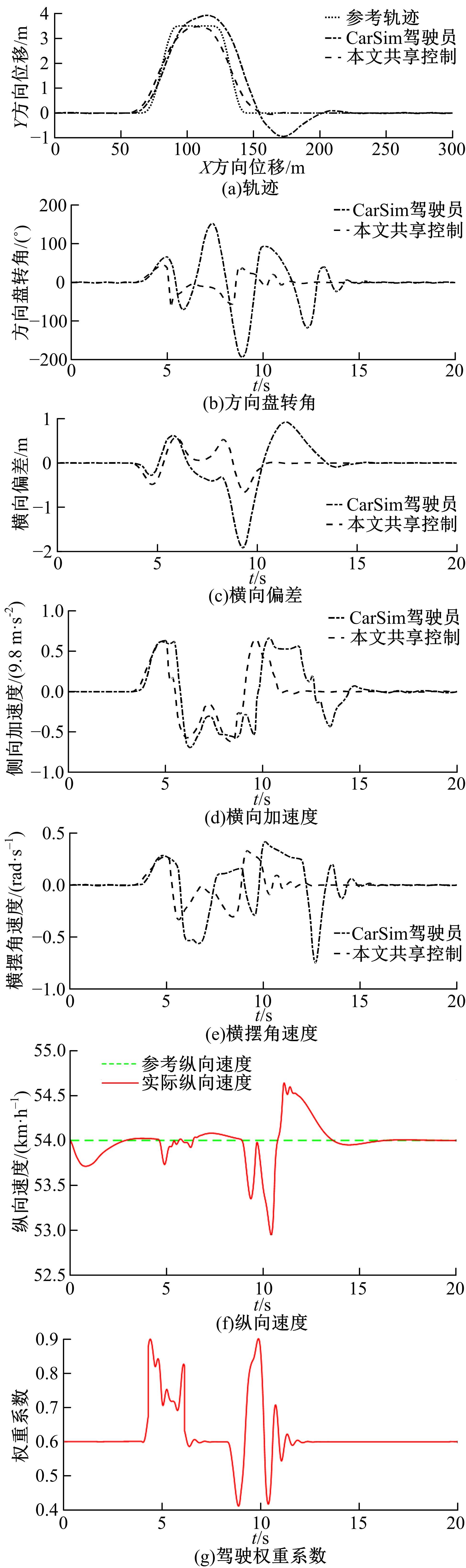
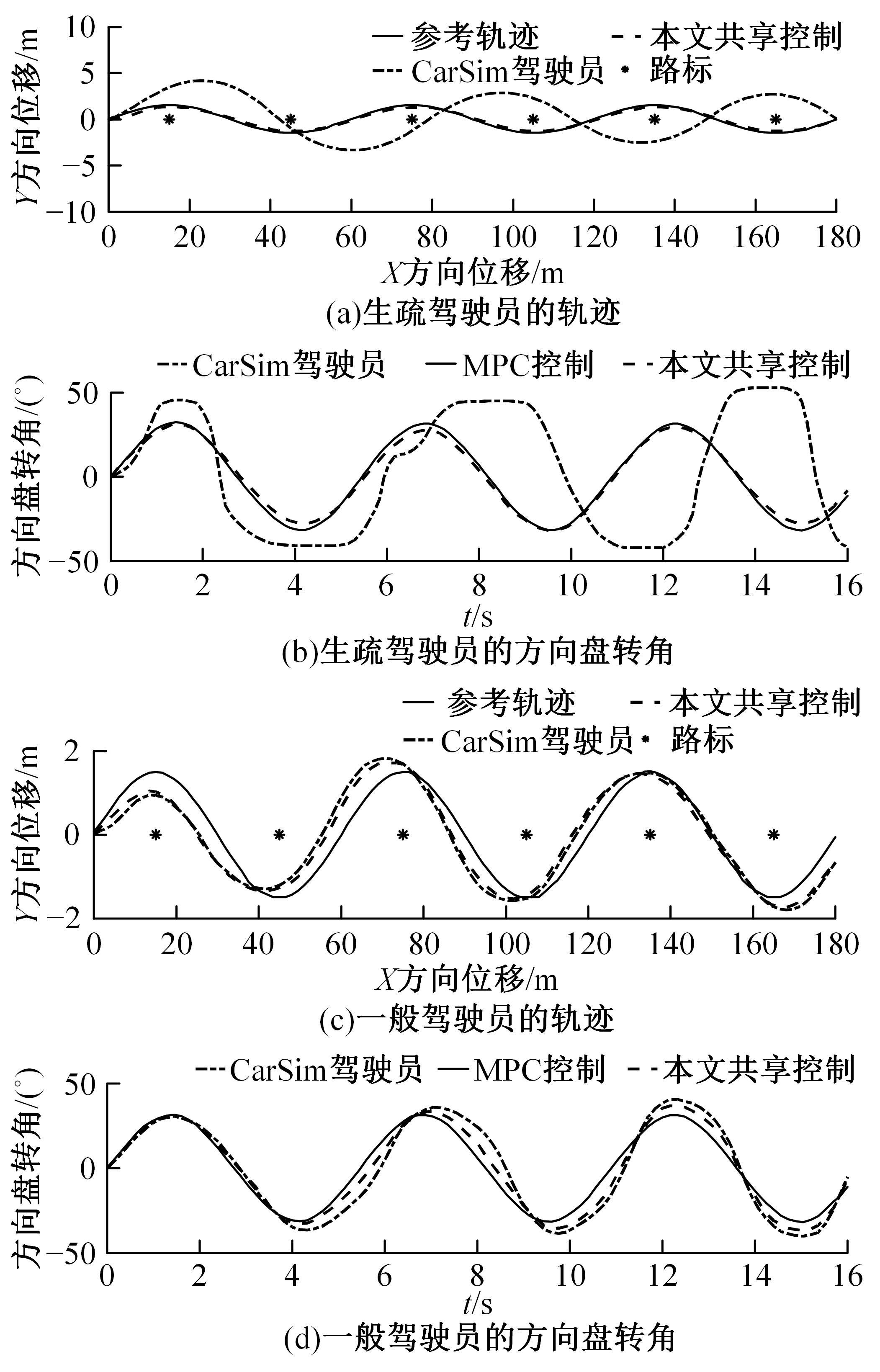
针对冰雪天气车辆更容易失稳的情况,研究了低附着、不对称路面情况下车辆对参考路径的稳定跟踪问题,同时考虑了驾驶员与智能控制器的协同共享,讨论了共享方式和驾驶权分配,以提高车辆在冰雪路面复杂路况下的跟踪精度和转向稳定性,保证驾驶员的驾驶体验。此外,建立了左右轮不对称的适用于冰雪路面的车辆模型,并确定了将冰雪路面下车辆转向稳定性约束作为后续模型预测控制求解的一部分,在人车共享结构下,基于模糊推理权重分配策略设计了共享转向模型预测控制器。Simulink/CarSim联合仿真验证了本文控制系统能有效提高车辆跟踪精度和行驶稳定性。
中图分类号:
- U461.6








| 1 | 宗长富, 代昌华, 张东. 智能汽车的人机共驾技术研究现状和发展趋势[J]. 中国公路学报, 2021, 34(6): 214-237. |
| Zong Chang-fu, Dai Chang-hua, Zhang Dong. Human-machine interaction technology of intelligent vehicles: current development trends and future directions[J]. China Journal of Highway and Transport, 2021, 34(6): 214-237. | |
| 2 | 赵又群, 李宇昊, 邓汇凡, 等. 基于Popov超稳定性的分布式电动汽车稳定性控制[J]. 吉林大学学报: 工学版, 2022, 52(10): 2225-2233. |
| Zhao You-qun, Li Yu-hao, Deng Hui-fan, et al. Stability control of distributed electric vehicle based on popov hyperstability[J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(10): 2225-2233. | |
| 3 | Marcano M, Díaz S, Pérez J, et al. A review of shared control for automated vehicles: theory and applications[J]. IEEE Transactions on Human-Machine Systems, 2020, 50(6): 475-491. |
| 4 | Wang W, Na X, Cao D, et al. Decision-making in driver-automation shared control: a review and perspectives[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1289-1307. |
| 5 | 胡云峰, 曲婷, 刘俊, 等. 智能汽车人机协同控制的研究现状与展望[J]. 自动化学报, 2019, 45(7): 1261-1280. |
| Hu Yun-feng, Qu Ting, Liu Jun, et al. Human-machine cooperative control of intelligent vehicle: recent developments and future perspectives[J]. Acta Automatica Sinica, 2019,45(7): 1261-1280. | |
| 6 | 何仁, 赵晓聪, 杨奕彬, 等. 基于驾驶人风险响应机制的人机共驾模型[J]. 吉林大学学报:工学版, 2021, 51(3): 799-809. |
| He Ren, Zhao Xiao-cong, Yang Yi-bin, et al. Man⁃machine shared driving model using risk⁃response mechanism of human driver[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(3): 799-809. | |
| 7 | Xie J, Xu X, Wang F, et al. Modeling adaptive preview time of driver model for intelligent vehicles based on deep learning[J]. Journal of Systems and Control Engineering, 2022, 236(2): 355-369. |
| 8 | Lazcano A M R, Niu T, Akutain X C, et al. MPC-based haptic shared steering system: a driver modeling approach for symbiotic driving[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3): 1201-1211. |
| 9 | 田涛涛, 侯忠生, 刘世达, 等. 基于无模型自适应控制的无人驾驶汽车横向控制方法[J]. 自动化学报, 2017, 43(11): 1931-1940. |
| Tian Tao-tao, Hou Zhong-sheng, Liu Shi-da, et al. Model-free adaptive control based lateral control of self-driving car[J]. Acta Automatica Sinica, 2017, 43(11): 1931-1940. | |
| 10 | Li L, Lu Y, Wang R, et al. A three-dimensional dynamics control framework of vehicle lateral stability and rollover prevention via active braking with MPC[J]. IEEE Transactions on Industrial Electronics, 2016, 64(4): 3389-3401. |
| 11 | Chouki S, Anh-Tu N, Amir B M, et al. Driver-automation cooperation oriented approach for shared control of lane keeping assist systems[J]. IEEE Transactions on Control Systems Technology, 2019, 27(5): 1962-1978. |
| 12 | 刘俊. 智能车辆人机协同转向控制策略研究[D]. 长春: 吉林大学通信工程学院, 2020. |
| Liu Jun. Research on driver-automation cooperative steering control strategy of intelligent vehicle[D]. Changchun: College of Communication Engineering, Jilin University, 2020. | |
| 13 | Tian Y, Zhao Y, Shi Y, et al. The indirect shared steering control under double loop structure of driver and automation[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1403-1416. |
| 14 | 葛召浩. 一种极限工况下人-车-路闭环系统纵横向协同控制方法[D]. 南京: 南京航空航天大学能源与动力学院, 2020. |
| Ge Zhao-hao. A longitudinal-lateral cooperative control method for human-vehicle-road closed loop system under extreme conditions[D]. Nanjing: College of Energy and Power Engineering, Nanjing University of Aeronautics and Astronautics, 2020. | |
| 15 | Wang P, Liu H, Guo L, et al. Design and experimental verification of real-time nonlinear predictive controller for improving the stability of production vehicles[J]. IEEE Transactions on Control Systems Technology, 2020, 29(5): 2206-2213. |
| 16 | 张雷, 赵宪华, 王震坡. 四轮轮毂电机独立驱动电动汽车轨迹跟踪与横摆稳定性协调控制研究[J]. 汽车工程, 2020, 42(11): 1513-1521. |
| Zhang Lei, Zhao Xian-hua, Wang Zhen-po. Study on coordinated control of trajectory tracking and yaw stability for autonomous four-wheel-independent-driving electric vehicles[J]. Automotive Engineering, 2020, 42(11): 1513-1521. | |
| 17 | 司振立. 基于模型预测的分布式驱动智能车轨迹跟踪研究[D]. 长春: 吉林大学汽车工程学院, 2020. |
| Si Zhen-li. Research on trajectory tracking of distributed driving intelligent vehicle based on model predictive control[D]. Changchun: College of Automotive Engineering, Jilin University, 2020. | |
| 18 | 谭运生. 电动轮汽车转向的动态稳定控制及人车闭环仿真研究[D]. 南京: 南京航空航天大学能源与动力学院, 2015. |
| Tan Yun-sheng. Study of dynamic stability control and driver-vehicle closed loop system for in-wheel motor electric vehicles steering[D]. Nanjing: College of Energy and Power Engineering, Nanjing University of Aeronautics and Astronautics, 2015. |
| [1] | 田彦涛,许富强,王凯歌,郝子绪. 考虑周车信息的自车期望轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(3): 674-681. |
| [2] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [3] | 何科,丁海涛,赖宣淇,许男,郭孔辉. 基于Transformer的轮式里程计误差预测模型[J]. 吉林大学学报(工学版), 2023, 53(3): 653-662. |
| [4] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [5] | 何科,丁海涛,许男,郭孔辉. 基于摄像头和车道线的增强定位系统[J]. 吉林大学学报(工学版), 2023, 53(3): 663-673. |
| [6] | 朱冰,范天昕,赵健,张培兴,孙宇航. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报(工学版), 2023, 53(3): 704-712. |
| [7] | 王登峰,陈宏利,那景新,陈鑫. 单双搭接接头经高温老化后的失效对比[J]. 吉林大学学报(工学版), 2023, 53(2): 346-354. |
| [8] | 张佩,王志伟,杜常清,颜伏伍,卢炽华. 车用质子交换膜燃料电池空气系统过氧比控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 1996-2003. |
| [9] | 胡云峰,于彤,杨惠策,孙耀. 低温环境下燃料电池启动优化控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 2034-2043. |
| [10] | 隗海林,王泽钊,张家祯,刘洋. 基于Avl-Cruise的燃料电池汽车传动比及能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2119-2129. |
| [11] | 刘岩,丁天威,王宇鹏,都京,赵洪辉. 基于自适应控制的燃料电池发动机热管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2168-2174. |
| [12] | 李丞,景浩,胡广地,刘晓东,冯彪. 适用于质子交换膜燃料电池系统的高阶滑模观测器[J]. 吉林大学学报(工学版), 2022, 52(9): 2203-2212. |
| [13] | 王克勇,鲍大同,周苏. 基于数据驱动的车用燃料电池故障在线自适应诊断算法[J]. 吉林大学学报(工学版), 2022, 52(9): 2107-2118. |
| [14] | 曹起铭,闵海涛,孙维毅,于远彬,蒋俊宇. 质子交换膜燃料电池低温启动水热平衡特性[J]. 吉林大学学报(工学版), 2022, 52(9): 2139-2146. |
| [15] | 陈凤祥,伍琪,李元松,莫天德,李煜,黄李平,苏建红,张卫东. 2.5吨燃料电池混合动力叉车匹配、仿真及优化[J]. 吉林大学学报(工学版), 2022, 52(9): 2044-2054. |
|
||