吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (12): 3660-3672.doi: 10.13229/j.cnki.jdxbgxb.20230847
基于约束优化的自适应衰减记忆平方根混合阶容积粒子滤波在惯性/卫星组合导航中的应用
王宁( ),刘繁明()
),刘繁明()
- 哈尔滨工程大学 智能科学与工程学院,哈尔滨 150001
Application of constrained optimization⁃based adaptive fading memory square root mixed⁃order cubature particle filtering in SINS/GNSS integrated navigation
Ning WANG(),Fan-ming LIU()
- College of Intelligent Systems Science and Engineering,Harbin Engineering University,Harbin 150001,China
摘要:
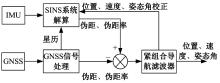
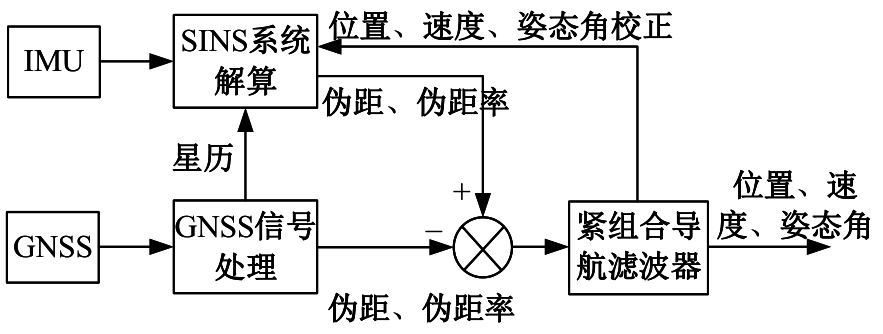
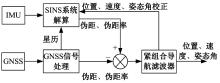
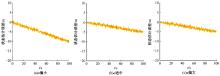
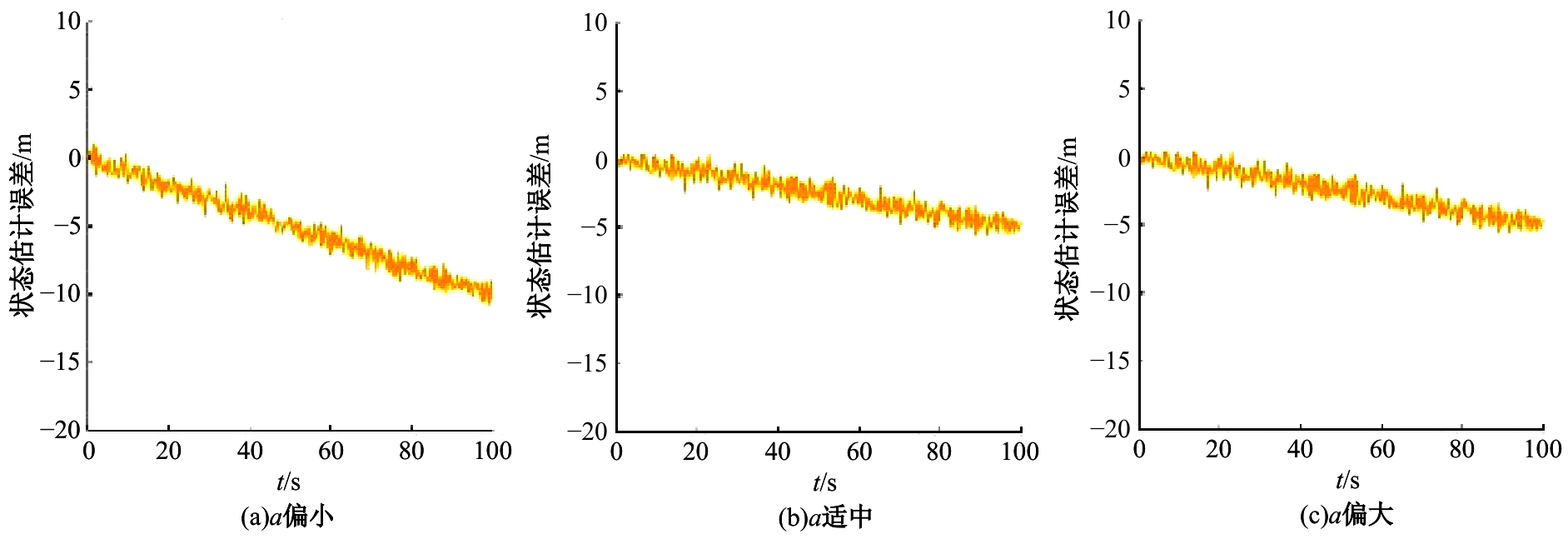
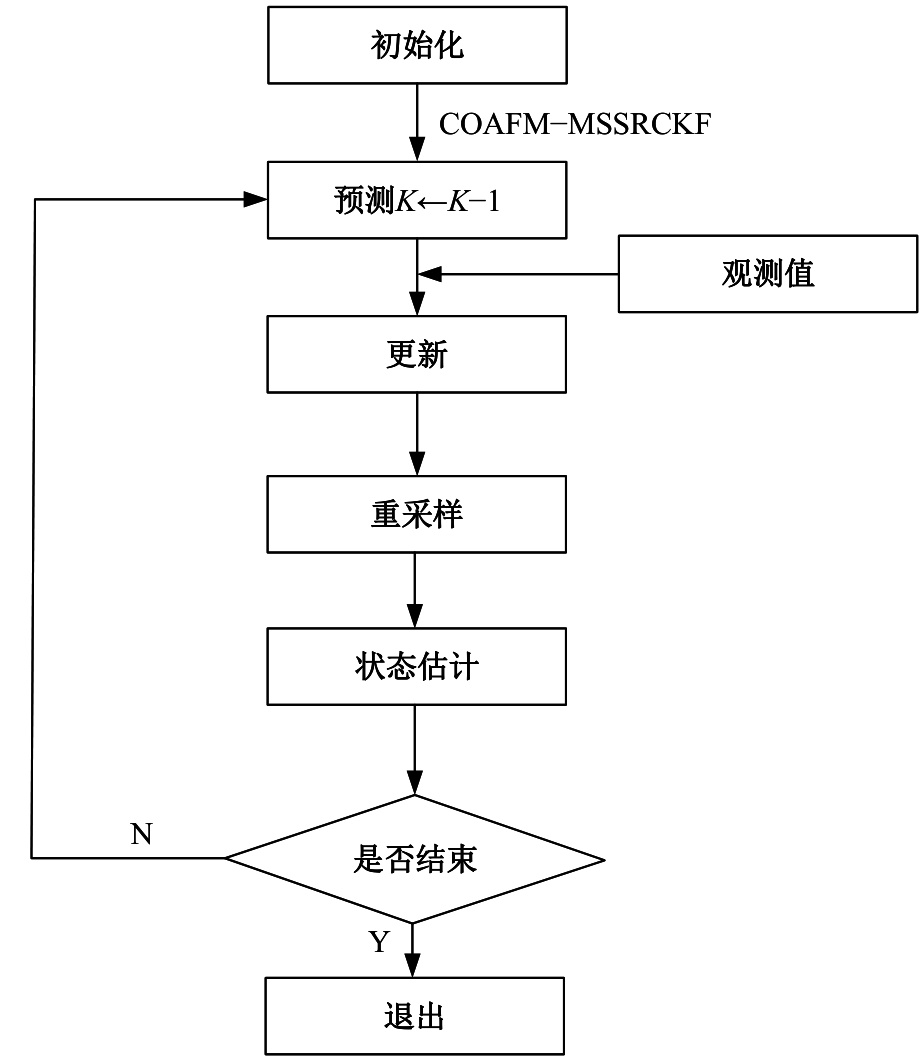
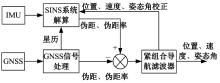
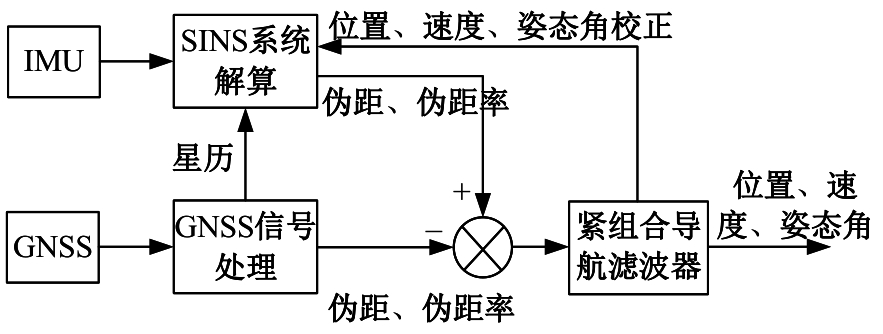
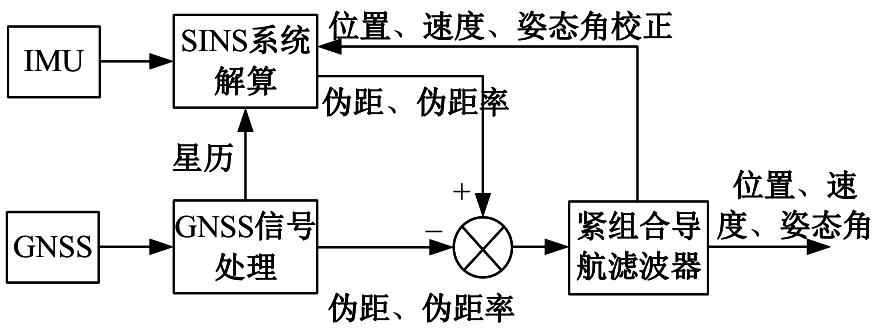
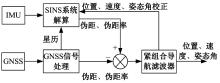
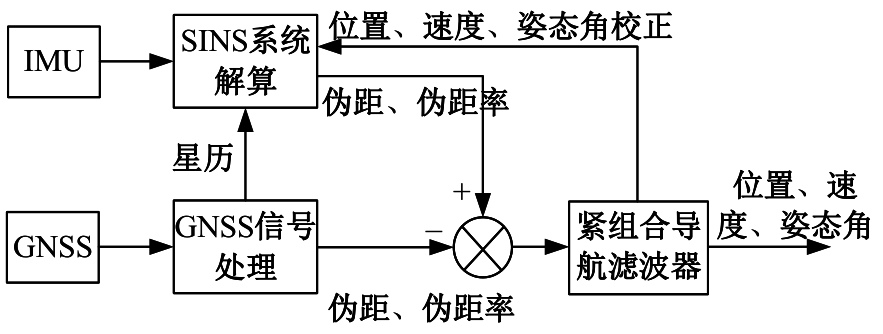
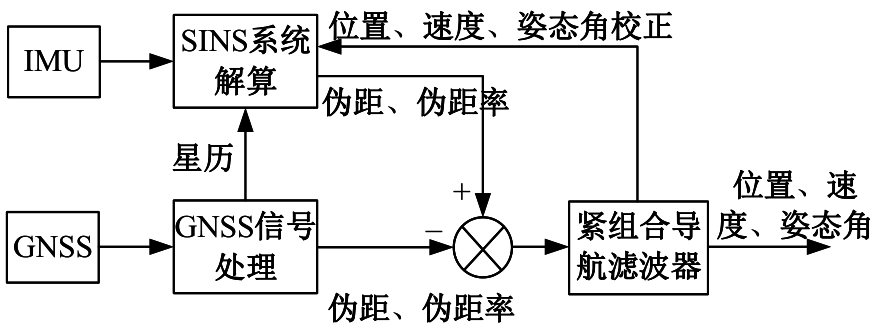
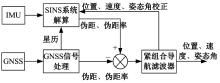
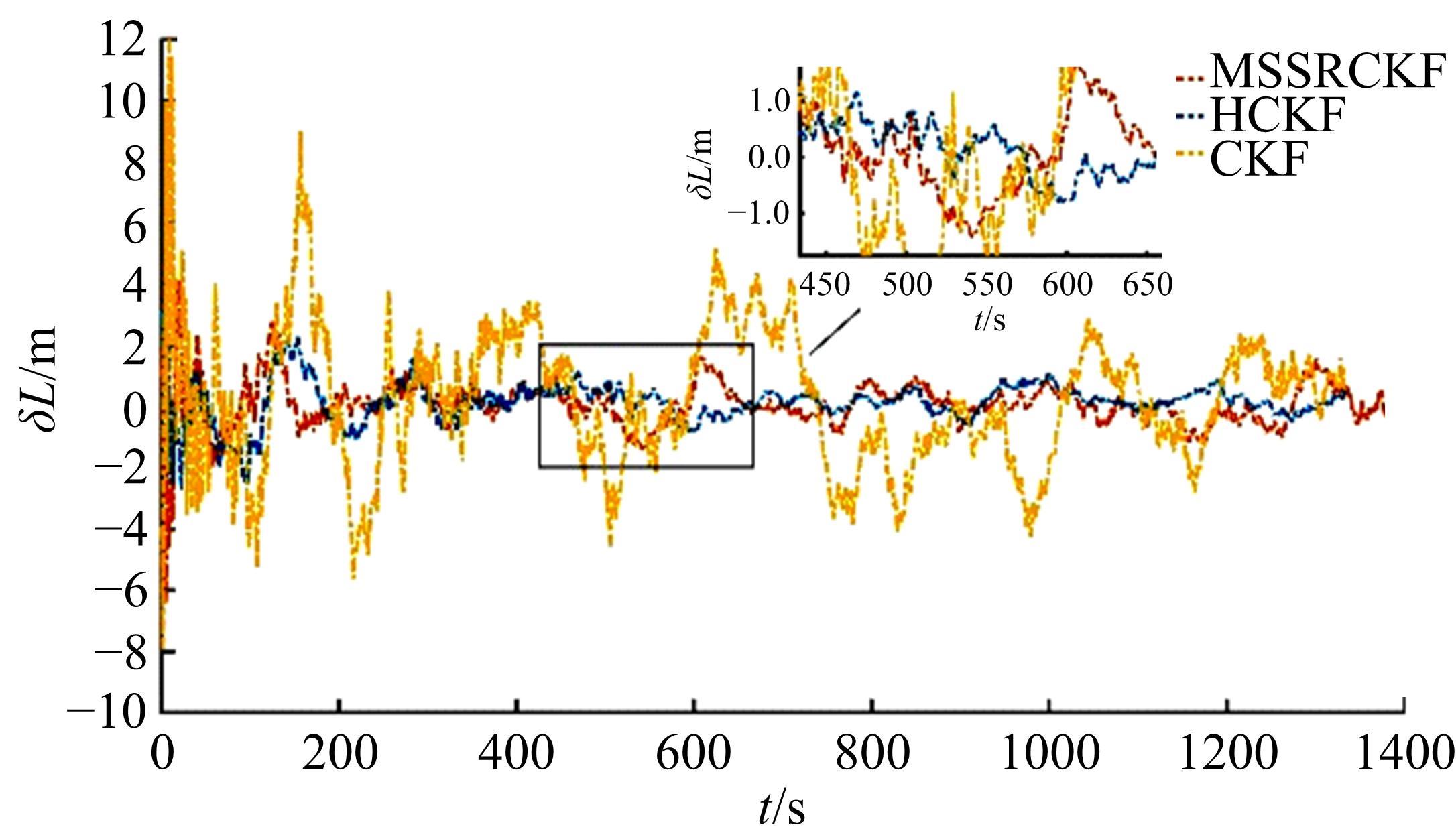
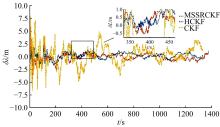
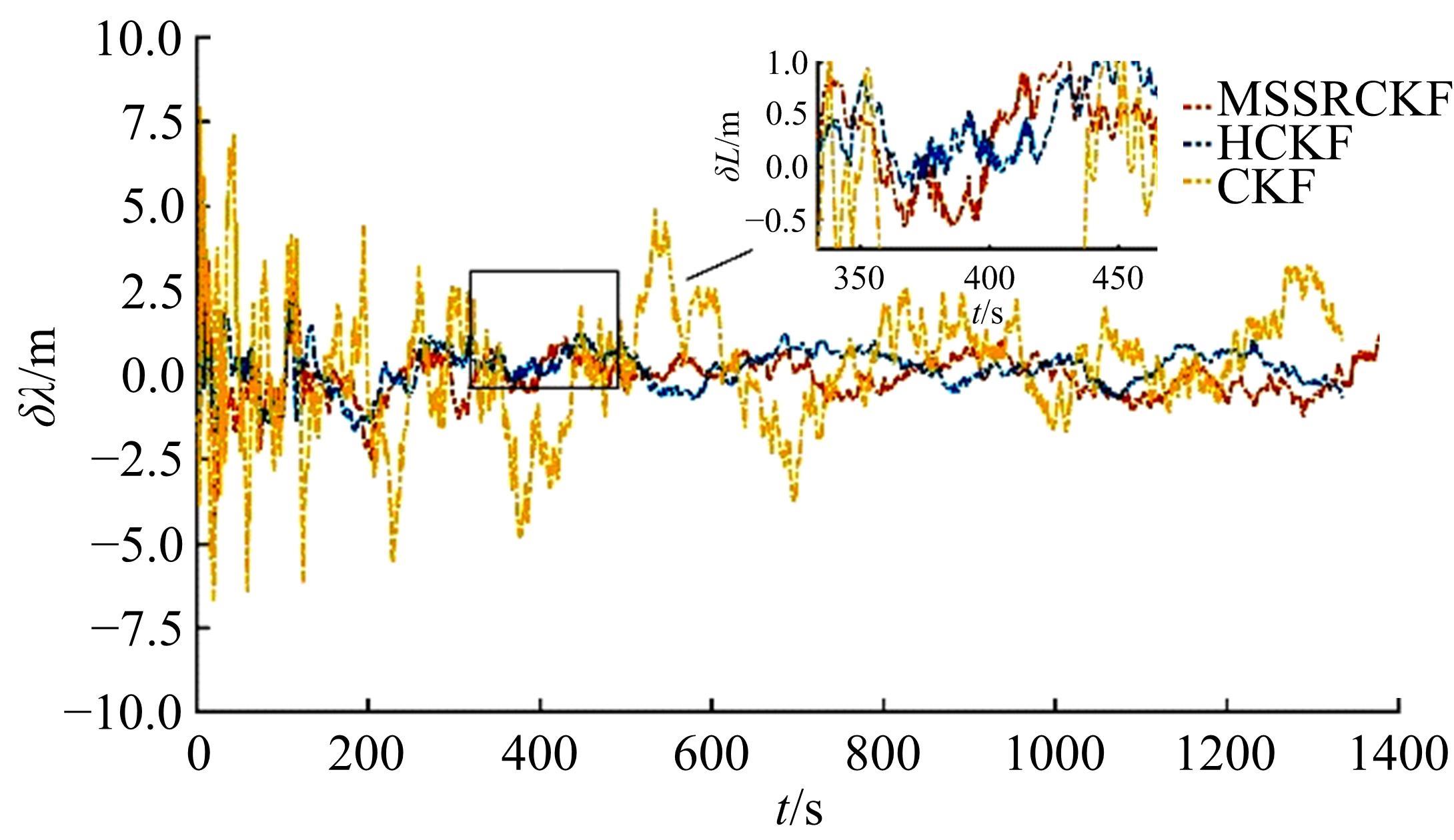
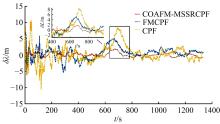
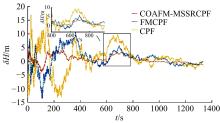
针对粒子滤波中粒子退化和重要性密度函数选择难题,本文提出一种基于约束优化的自适应衰减记忆平方根混合阶球面单纯形-径向容积粒子滤波算法。该算法结合约束优化、自适应衰减记忆、平方根滤波和混合阶球面单纯形-径向容积卡尔曼滤波的优势,通过混合阶球面单纯形-径向容积准则采样,算法在精度上优于传统的容积卡尔曼滤波,计算复杂度低于高阶容积卡尔曼滤波。自适应衰减记忆平方根策略用于预测和更新协方差矩阵,增强当前量测信息权重,减弱历史信息影响,避免协方差矩阵的不对称性、负定性和滤波发散问题。算法动态调整噪声协方差矩阵,并通过约束误差协方差与测量噪声协方差比值,提高状态估计收敛速度和精度。仿真结果表明,基于约束优化的自适应衰减记忆平方根混合阶球面单纯形-径向容积粒子滤波算法在SINS/GNSS组合导航系统中能有效抑制滤波发散,与衰减记忆容积粒子滤波和传统容积粒子滤波算法相比,显著提高滤波精度和鲁棒性。
中图分类号:
- TP2
| 1 | Zhao X, Li jian-li, Yan Xun-liang,et al. Robust adaptive cubature Kalman filter and its application to ultra-tightly coupled SINS/GPS navigation system[J]. Sensors, 2018, 18(7): No.2352. |
| 2 | Li L, Wang J, Chen Z, et al. Application of adaptive robust Kalman filter based on MCC for SINS/GPS integrated navigation[J]. Sensors, 2023, 23(19): No.8131. |
| 3 | Wang Lian-sheng, Xia Yuan-qing. Mars entry navigation with uncertain parameters based on desensitized extended Kalman filter[J]. IEEE Transactions on Industrial Informatics, 2015, 11(5): 998-1005. |
| 4 | Li D, Ji D, Liu J, et al. A multi-model EKF integrated navigation algorithm for deep water AUV[J]. Int J Adv Robot Syst, 2016, 13(1): 3. |
| 5 | Yazdkhasti S, Sasiadek J Z, Ulrich S. Performance enhancement for GPS/INS fusion by using a fuzzy adaptive unscented Kalman filter[C]∥Proceedings of the 21st International Conference on Methods and Models in Automation and Robotics (MMAR),Miedzyzdroje, Poland, 2016: 1194-1199. |
| 6 | Li K L, Chang L B, Hu B Q,et al. A variational Bayesian-based unscented Kalman filter with both adaptivity and robustness[J]. : IEEE Sensors Journal, 2016, 16(18): 6966-6976. |
| 7 | Arasaratnam I, Haykin S. Cubature Kalman filters[J]. IEEE Trans Autom Control, 2009, 54(6): 1254-1269. |
| 8 | Xu B, Zhang P, Wen H, et al. Stochastic stability and performance analysis of cubature Kalman filter[J]. Neurocomputing, 2016, 186: 218-227. |
| 9 | Chandra B P K, Gu D, Postlethwaite I. Square root cubature information filter[J]. IEEE Sens J, 2013, 13(2): 750-758. |
| 10 | Wang D, Lv H, Wu J. Augmented cubature Kalman filter for nonlinear RTK/MIMU integrated navigation with non-additive noise[J]. Measurement, 2017, 97: 111-125. |
| 11 | Cui Bing-bo, Chen Xi-yuan, Tang Xin-hua. Improved cubature Kalman filter for GNSS/INS based on transformation of posterior sigma-points error[J]. IEEE Trans Signal Process, 2017, 65(11): 2975-2987. |
| 12 | Jiang C, Chen S, Bo Y, et al. Performance improvement of GPS/SINS ultra-tightly integrated navigation system utilizing a robust cubature Kalman filter[J]. J Aeronaut Astronaut Aviat, 2017, 49(1): 49-55. |
| 13 | Benzerrouk H, Nebylov A. Robust nonlinear filtering applied to integrated navigation system INS/GNSS under non-Gaussian measurement noise effect[J]. IFAC Proc Vol, 2012, 45(1): 202-207. |
| 14 | Jia Bin, Xin Ming, Cheng Yang.High-degree cubature Kalman filter[J].Automatica, 2013, 49(2): 510-518. |
| 15 | Cui Bing-bo, Wei Xin-hua, Chen Xi-yuan, et al. Improved high-degree cubature Kalman filter based on resampling-free sigma-point update framework and its application for inertial navigation system-based integrated navigation[J]. Aerosp Sci Technol, 2021(117): No.106905. |
| 16 | 郝顺义, 卢航, 魏翔, 等. 简化高阶强跟踪容积卡尔曼滤波及其在组合导航中的应用[J]. 控制与决策, 2019, 34(10): 2105-2114. |
| Hao, Shun-yi, Lu Hang, Wei Xiang, et al. Simplified high-order strong tracking cubature kalman filter and its application in integrated navigation[J]. Control and Decision, 2019, 34(10): 2105-2114. | |
| 17 | Quan L, Chang R, Guo C. Vehicle state and road adhesion coefficient joint estimation based on high-order cubature Kalman algorithm[J]. Applied Sciences, 2023, 13(19): No.10734. |
| 18 | Wang S, Feng Y, Duan S, et al. Spherical simplex-radial cubature Kalman filter[J]. IEEE Signal Process Lett, 2014, 21(4): 405-408. |
| 19 | Cui B, Wei X, Chen X, et al. Improved high-degree cubature Kalman filter based on resampling-free sigma-point update framework and its application for inertial navigation system-based integrated navigation[J]. Aerosp Sci Technol, 2021, 117(3): No.106905. |
| 20 | 徐晓苏, 董亚, 童金武, 等.基于5阶球面最简相径的改进型容积卡尔曼滤波在SINS/DVL组合导航中的应用[J]. 中国惯性技术学报, 2017, 25(3): 343-348. |
| Xu Xiao-su, Dong Ya, Tong Jin-wu, et al. Application of an improved fifth-order spherical simplex-radial cubature kalman filter in SINS/DVL Integrated navigation[J]. Journal of Chinese Inertial Technology, 2017, 25(3): 343-348. | |
| 21 | Li N, Ma W, Man W, et al. Multiple robust high-degree cubature Kalman filter for relative position and attitude estimation of satellite formation[J]. J Navig, 2019, 72(5): 1254-1274. |
| 22 | Wang S, Fang Y, Duan S, et al. Mixed-degree spherical simplex-radial cubature Kalman filter[J]. Math Probl Eng, 2017, 2017: 1-9. |
| 23 | Dang L, Chen B, Huang Y, et al. Cubature Kalman filter under minimum error entropy with fiducial points for INS/GPS integration[J]. Acta Autom Sin, 2022, 9(3): 16. |
| 24 | 高怡, 高社生, 吴佳鹏. 衰减记忆平方根UPF算法及其在组合导航中的应用[J]. 中国惯性技术学报,2014, 22(6): 777-781. |
| Gao Yi, Gao She-sheng, Wu Jia-Peng. fading memory square root UPF algorithm and its application in integrated navigation[J]. Journal of Chinese Inertial Technology, 2014, 22(6): 777-781. | |
| 25 | 杨旺明. 衰减记忆平方根容积卡尔曼滤波及其应用[J].计算机与数字工程, 2018, 46(3): 471-474. |
| Yang Wang-ming. Fading memory square root cubature Kalman filter and its application[J]. Computer and Digital Engineering, 2018, 46(3): 471-474. | |
| 26 | Ning X, Huang P. Adaptive points range square-root cubature Kalman filter for Mars approach navigation[C]∥Proceedings of the 33rd Chinese Control Conference,Nanjing, China,2014: 903-908. |
| 27 | 李荣攀, 西勤, 刘松林. 改进的衰减记忆UKF算法在伪距定位中的研究[J]. 测绘与空间地理信息, 2017, 40(6):30-32, 36. |
| Li Rong-pan, Xi Qin, Liu Song-lin. Research on an improved fading memory UKF algorithm in pseudorange positioning[J]. Geomatics & Spatial Information Technology, 2017, 40(6): 30-32, 36. | |
| 28 | Arulampalam M S, Maskell S, Gordon N, et al. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]. IEEE Trans Signal Process, 2002, 50(2): 174-188. |
| 29 | 李星星, 纪元法, 孙希延, 等. 一种基于约束的衰减记忆容积卡尔曼滤波方法[P].中国:CN202311516111.3, 2024-02-13. |
| 30 | Shen Z, Tang Y. A modified ensemble Kalman particle filter for non-Gaussian systems with nonlinear measurement functions[J]. J Adv Model Earth Syst, 2015, 7(1): 50-66. |
| 31 | 葛磊. 容积卡尔曼滤波算法研究及其在导航中的应用[D].哈尔滨: 哈尔滨工程大学自动化学院, 2013. |
| Ge Lei. Research on cubature Kalman filtering algorithm and its application in navigation[D]. Harbin: College of Automation, Harbin Engineering University, 2013. | |
| 32 | van Nguyen N, Duc T C, Tran D T. Enhanced accuracy navigation solution of an integrated SINS/GPS system using a simple and effective adaptive Kalman filter[J/OL]. [2023-07-12]. |
| 33 | Yang Y, Gao W. An optimal adaptive Kalman filter[J]. Journal of Geodesy, 2006, 80: 177-183. |
| 34 | Gao W, Yang Y, Cui X, et al. Application of adaptive Kalman filtering algorithm in IMU/GPS integrated navigation system[J]. Geo-spatial Information Science, 2007, 10(1): 22-26. |
| 35 | 王满林. 自适应衰减记忆UKF算法在三维水下目标跟踪中的应用[J].四川兵工学报, 2012, 33(5): 44-47. |
| Wang man-lin. Application of adaptive fading memory ukf algorithm in 3Dunderwater target tracking[J]. Journal of Sichuan Ordnance, 2012, 33(5): 44-47. | |
| 36 | 迟凤阳, 孙枫, 徐博. 迭代容积粒子滤波算法在SINS初始对准中的应用[J]. 传感器与微系统, 2013,32(7): 136-140. |
| Chi Feng-yang, Sun Feng, Xu Bo. Application of iterative cubature particle filter algorithm in SINS initial alignment[J]. Transducer and Microsystem Technologies, 2013, 32(7): 136-140. | |
| 37 | 迟凤阳. 水下航行器组合导航定位技术研究[D].哈尔滨: 哈尔滨工程大学自动化学院, 2015. |
| Chi Feng-yang. Research on integrated navigation and positioning technology for underwater vehicles [D]. Harbin: College of Automation, Harbin Engineering University, 2015. | |
| 38 | 徐晓苏, 田泽鑫, 刘义亭, 等. 基于改进型CKF的SINS初始对准方法[J]. 华中科技大学学报: 自然科学版, 2016, 44(1): 81-86. |
| Xu Xiao-su, Tian Ze-xin, Liu Yi-ting, et al. SINS initial alignment method based on an improved CKF [J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2016, 44(1): 81-86. | |
| 39 | Arasaratnam I, Haykin S. Cubature Kalman filters[J]. IEEE Trans Autom Control, 2009, 54(6): 1254-1269. |
| 40 | Wang S Y, Feng Y L, Duan S K, et al. Mixed-degree spherical simplex-radial cubature Kalman filter[J]. Mathematical Problems in Engineering, 2017, 2017: No. 6969453. |
| [1] | 樊学平,刘月飞. 基于改进高斯混合粒子滤波新算法的桥梁极值应力动态预测[J]. 吉林大学学报(工学版), 2024, 54(4): 1038-1044. |
| [2] | 金静,党建武,王阳萍,申东. 融合模糊统计纹理特征的多线索粒子滤波跟踪[J]. 吉林大学学报(工学版), 2021, 51(3): 1111-1120. |
| [3] | 樊学平,屈广,刘月飞. 应用新数据同化算法的桥梁极值应力预测[J]. 吉林大学学报(工学版), 2020, 50(2): 572-580. |
| [4] | 杨超宇, 李策, 梁胤程, 杨峰. 基于改进粒子滤波的煤矿视频监控模糊目标检测[J]. 吉林大学学报(工学版), 2017, 47(6): 1976-1985. |
| [5] | 李娟, 刘晓龙, 卢长刚, 左英泽. 改进的粒子滤波重采样算法[J]. 吉林大学学报(工学版), 2015, 45(6): 2069-2074. |
| [6] | 武勇, 王俊, 曹运合, 张培川. 基于二次预测的粒子滤波算法[J]. 吉林大学学报(工学版), 2015, 45(5): 1696-1701. |
| [7] | 董宁,王宇平. 求解约束优化问题的引导多目标差分进化算法[J]. 吉林大学学报(工学版), 2015, 45(2): 569-575. |
| [8] | 杨欣,刘加,周鹏宇,周大可. 基于多特征融合的粒子滤波自适应目标跟踪算法[J]. 吉林大学学报(工学版), 2015, 45(2): 533-539. |
| [9] | 孔云波, 冯新喜, 鹿传国, 刘振涛. 基于Sigma点H∞滤波的拟蒙特卡罗粒子滤波算法[J]. 吉林大学学报(工学版), 2014, 44(6): 1831-1837. |
| [10] | 曹洁, 戴彬, 李晓旭. 基于高斯Sigma点选取的改进UPF算法[J]. 吉林大学学报(工学版), 2014, 44(5): 1435-1440. |
| [11] | 卞亚涛, 赵旭, 宋健, 刘允才. 并行化退火粒子滤波[J]. 吉林大学学报(工学版), 2013, 43(增刊1): 239-243. |
| [12] | 戴连君, 唐涛, 蔡伯根. 基于自适应粒子滤波的北斗卫星信号周跳探测[J]. 吉林大学学报(工学版), 2013, 43(04): 1146-1152. |
| [13] | 杨澜, 赵祥模, 惠飞, 周经美, 史昕. 入侵式野草优化粒子滤波方法[J]. 吉林大学学报(工学版), 2013, 43(04): 1070-1075. |
| [14] | 李昱辰, 李战明. 噪声未知情况下的自适应无迹粒子滤波算法[J]. 吉林大学学报(工学版), 2013, 43(04): 1139-1145. |
| [15] | 李文辉, 周强, 王莹, 张德才. 基于均值偏移粒子滤波的自适应跟踪[J]. 吉林大学学报(工学版), 2012, 42(02): 407-411. |
|