吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (11): 3544-3553.doi: 10.13229/j.cnki.jdxbgxb.20240264
• 车辆工程·机械工程 • 上一篇
基于超扭曲扩张状态观测器的电子机械制动器夹紧力改进滑模控制
谭草1( ),宋亚东1,李波1(),司书哲2,郝明基1,丁嘉伟1
),宋亚东1,李波1(),司书哲2,郝明基1,丁嘉伟1
- 1.山东理工大学 交通与车辆工程学院,山东 淄博 255000
2.舜泰汽车有限公司,山东 淄博 255000
Improved sliding mode control of clamping force in electronic mechanical brake based on super-twisting extended state observer
Cao TAN1(),Ya-dong SONG1,Bo LI1(),Shu-zhe SI2,Ming-ji HAO1,Jia-wei DING1
- 1.School of Transportation and Vehicle Engineering,Shandong University of Technology,Zibo 255000,China
2.Shuntai Automobile Co. ,Ltd. ,Zibo 255000,China
摘要:
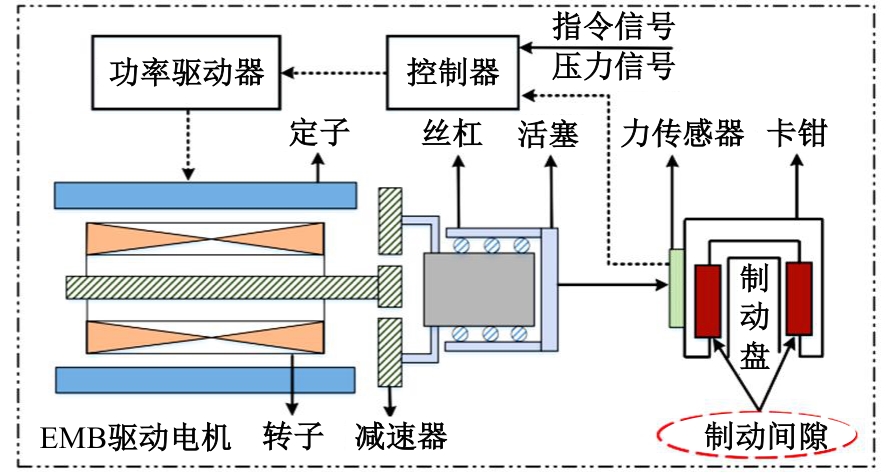
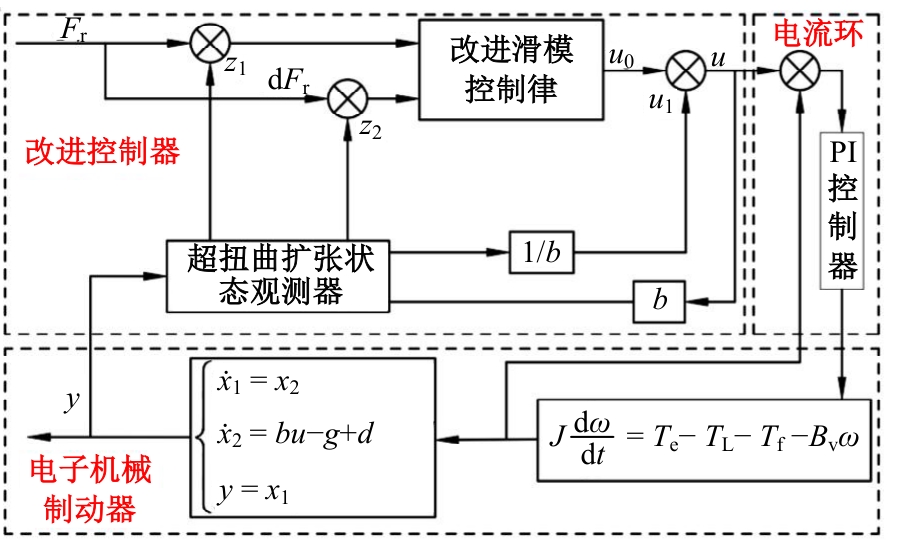
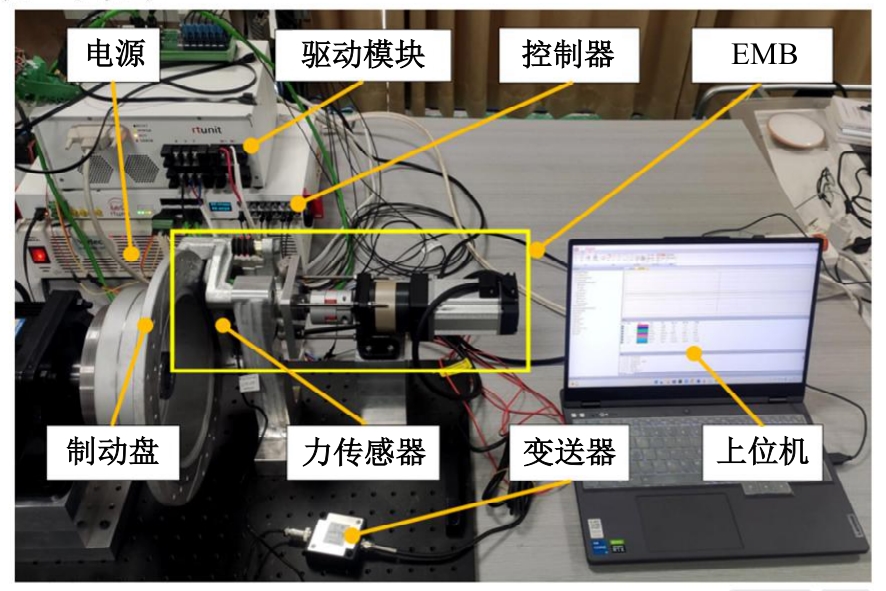
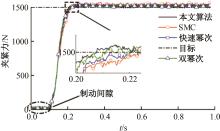
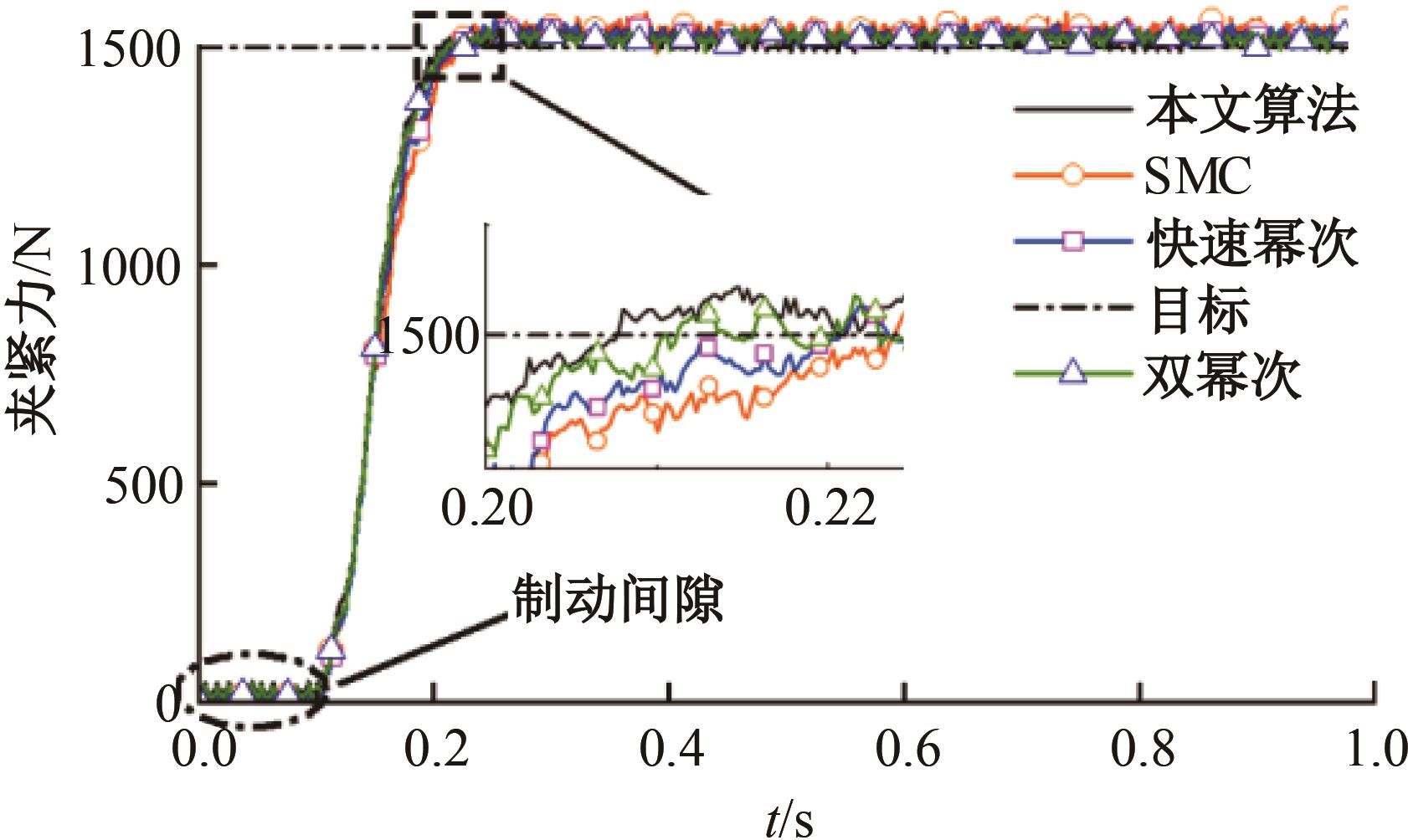
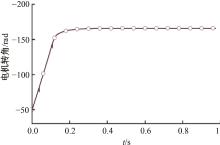
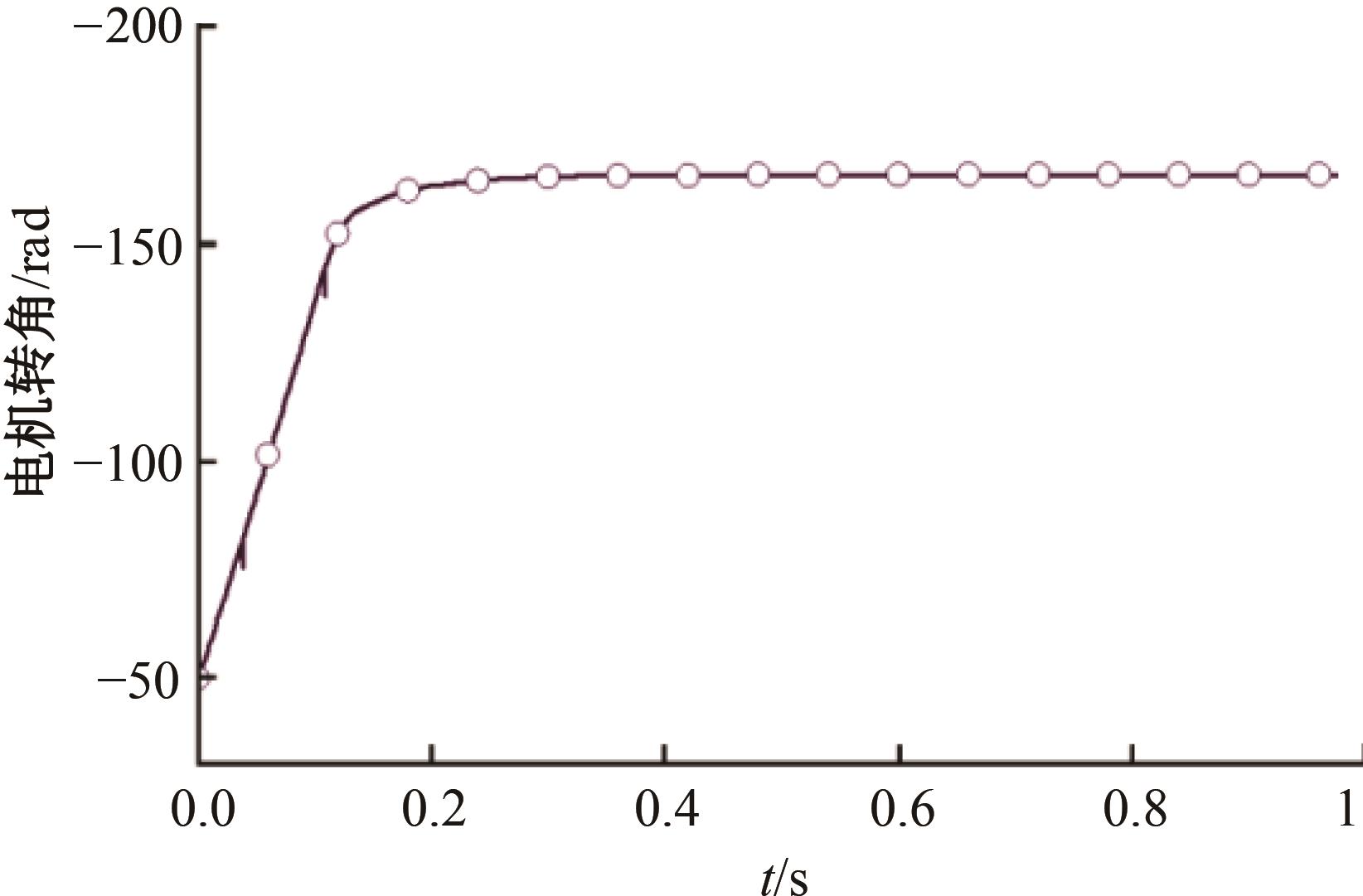
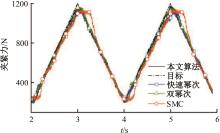
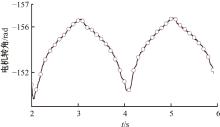
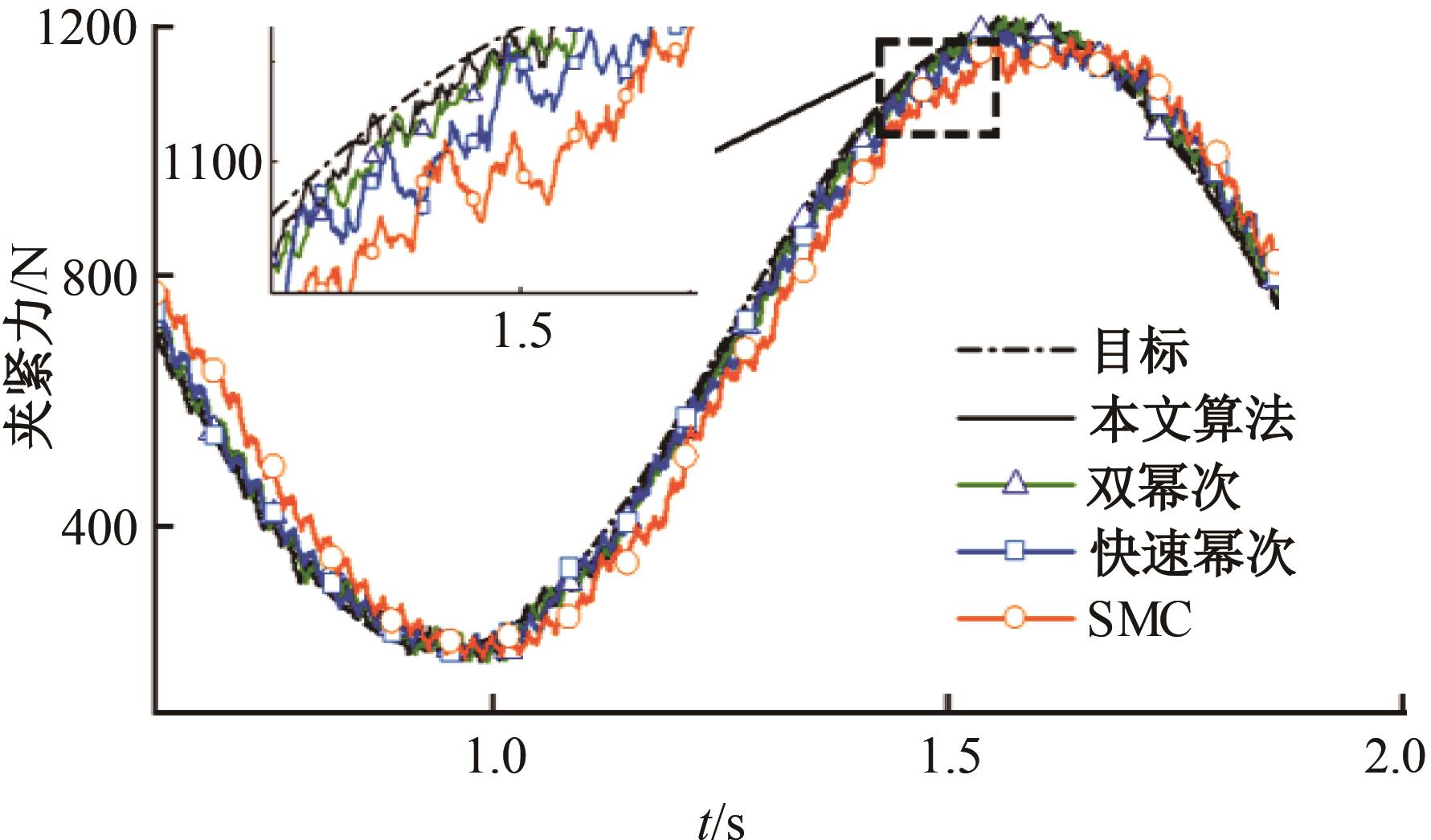
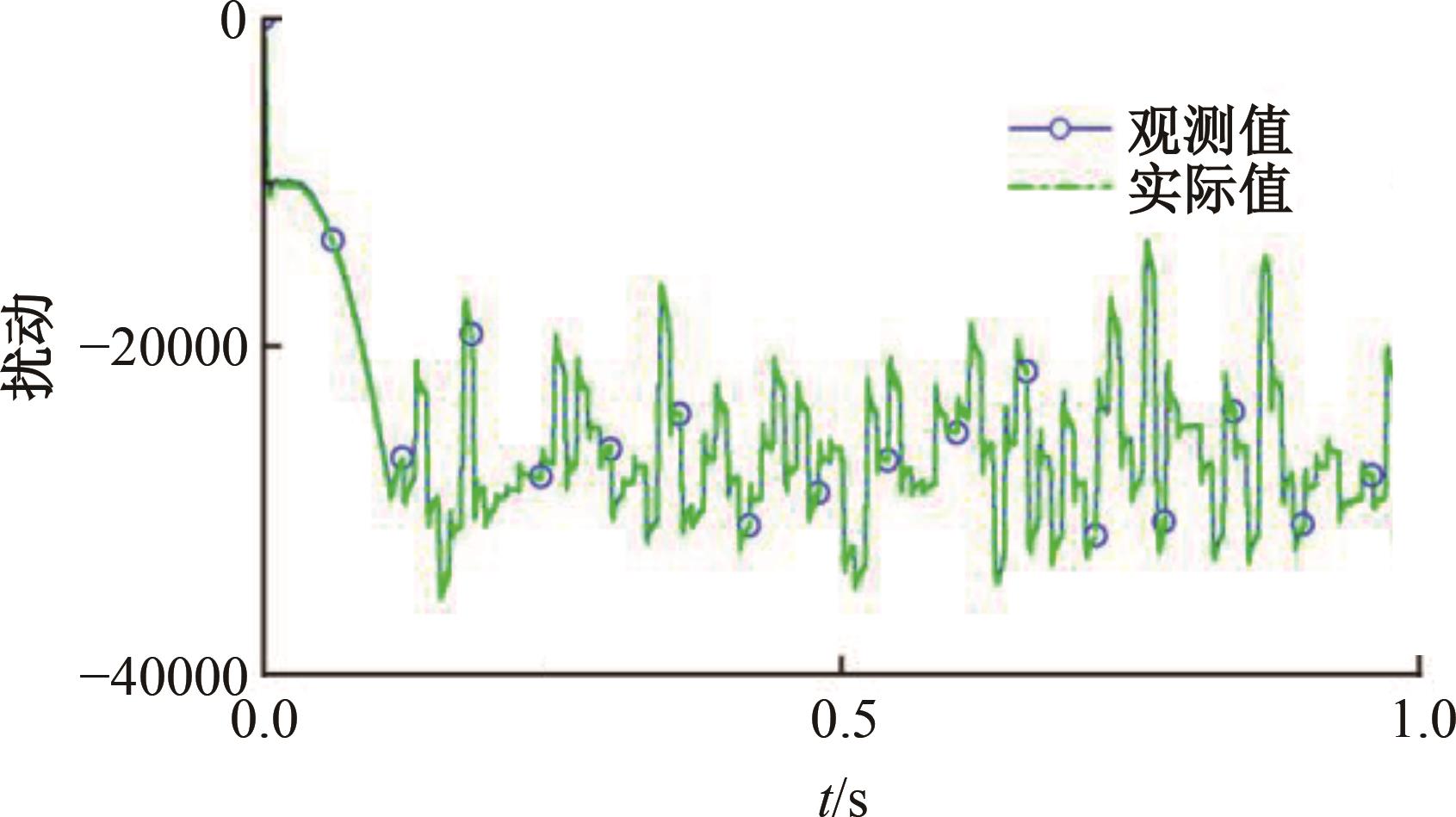
针对电子机械制动器因系统内部变量耦合、参数摄动、外部时变干扰等不确定性因素造成的夹紧力响应缓慢、控制精度恶化等问题,提出了基于超扭曲扩张状态观测器的电子机械制动器夹紧力改进滑模控制方法。首先,设计了一种改进的趋近律,在传统指数趋近律的基础上引入可变函数增益项及滑模面幂次项,增大趋近速率的同时削弱抖振,并且基于改进的趋近律和滑模面设计了改进的夹紧力控制器;其次,设计了基于超扭曲算法的扩张状态观测器,用于估计系统扰动,同时把扰动估计值前馈至控制器中给予补偿;再次,通过李雅普诺夫定理验证了系统的稳定性;最后,在台架试验中,将本文提出的算法与双幂次趋近律、快速幂次趋近律、指数趋近律等算法进行对比。结果表明:本文算法下电子机械制动器的夹紧力控制具有更高的响应速度、控制精度与抗干扰能力。
中图分类号:
- U463.5

| [1] | 李波, 黎德祥, 葛文庆, 等. 基于直驱阀的快速响应线控制动系统液压力精确控制[J]. 中国公路学报, 2021, 34(9): 121-132. |
| Li Bo, Li De-xiang, Ge Wen-qing, et al. Precision control of hydraulic pressure in fast-response brake-by-wire system based on direct-drive valve[J]. China Journal of Highway and Transport, 2021, 34(9): 121-132. | |
| [2] | Xu Z, Gerada C. Enhanced force estimation for electromechanical brake actuators in transportation vehicles[J]. IEEE Transactions on Power Electronics, 2021, 36(12): 14329-14339. |
| [3] | 熊璐, 李聪聪, 卓桂荣, 等. 电子机械制动器构型及控制技术发展现状[J]. 汽车工程, 2023, 45(12): 2187-2199. |
| Xiong Lu, Li Cong-cong, Zhuo Gui-rong, et al. Review on electro-mechanical brake structure and control technology[J]. Automotive Engineering, 2023,45 (12): 2187-2199. | |
| [4] | 何睿, 吴坚, 高吉. 汽车电动助力制动系统摩擦建模与补偿控制[J] .汽车工程, 2017, 39(6): 683-688. |
| He Rui, Wu Jian, Gao Ji. Modeling and compensation control of friction in vehicle power assisted braking systems[J]. Automotive Engineering, 2017, 39(6): 683-688. | |
| [5] | 赵立金, 杨世春, 曲婧瑶. 电子机械制动系统关键技术研究进展[J]. 北京航空航天大学学报, 2025, 51(4): 1037-1047. |
| Zhao Li-jin, Yang Shi-chun, Qu Jing-yao. Research progress of EMB systems key technology[J]. Journal of Beijing University of Aeronautics and Astronautics, 2025,51(4):1037-1047. | |
| [6] | Li J, Wang M C, He R, et al. A design of electromechanical brake system triple-loop controllers using frequency domain method based on Bode plote[C]∥Proceedings of 2011 International Conference on Transportation, Mechanical, and Electrical Engineering. Piscataway, NJ: IEEE, 2011: 795-798. |
| [7] | 彭晓燕, 何磊, 吕以滨. 基于滑移率的电子机械制动模糊滑模控制[J]. 中南大学学报: 自然科学版, 2018, 49(2): 360-370. |
| Peng Xiao-yan, He Lei, Lv Yi-bin. Fuzzy sliding mode control based on vehicle slip ratio for electro-mechanical braking systems[J]. Journal of Central South University (Science and Technology), 2018, 49(2): 360-370. | |
| [8] | Lindvai S D, Horn M. Modelling, control & implementation of an electro-mechanic braking force actuator for HEV and EV[J]. IFAC Proceedings Volumes, 2013, 46(21): 620-625. |
| [9] | Lee C F, Line C M C. Explicit nonlinear MPC of an automotive electromechanical brake[J]. IFAC Proceedings Volumes, 2008, 41(2): 10758-10763. |
| [10] | 张奇祥, 靳立强, 靳博豪, 等. EMB夹紧力控制与传感器故障诊断研究进展[J]. 汽车工程, 2022, 44(5): 736-746. |
| Zhang Qi-xiang, Jin Li-qiang, Jin Bo-hao, et al. Research progress of EMB clamping force control and sensor fault diagnosis[J]. Automotive Engineering, 2022, 44(5): 736-746. | |
| [11] | Ahn J K, Jung K H, Kim D H, et al. Analysis of a regenerative braking system for hybrid electric vehicles using an electro-mechanical brake[J]. International Journal of Automotive Technology, 2009, 10: 229-234. |
| [12] | Jo C, Hwang S, Kim H. Clamping-force control for electromechanical brake[J]. IEEE Transactions on Vehicular Technology, 2010, 59(7): 3205-3212. |
| [13] | 贺林,徐子昂,黄春荣, 等. 线控转向系统转角预测滑模控制算法研究[J]. 汽车工程, 2023, 45(12): 2200-2208. |
| He Lin, Xu Zi-ang, Huang Chun-rong, et al. Research on sliding mode control algorithm for angle tracking of steer-by-wire system[J]. Automotive Engineering, 2023, 45(12): 2200-2208. | |
| [14] | 李智斌, 李亮, 张建强, 等. 双轴音圈电机快速反射镜的系统建模与滑模控制[J]. 光学精密工程, 2023, 31(24): 3580-3594. |
| Li Zhi-bin, Li Liang, Zhang Jian-qiang, et al. System modeling and sliding mode control of dual-axis voice coil actuator fast steering mirror[J]. Optical Precision Engineering, 2023, 31(24): 3580-3594. | |
| [15] | Han K, Kim M, Huh K. Modeling and control of an electronic wedge brake[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2012, 226(10): 2440-2455. |
| [16] | Zhao Y Y, Lin H, Li B Q. Sliding-mode clamping force control of electromechanical brake system based on enhanced reaching law[J]. IEEE Access, 2021, 9: 19506-19515. |
| [17] | Park G, Choi S B. Clamping force control based on dynamic model estimation for electromechanical brakes[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2018, 232(14): 2000-2013. |
| [18] | Bae J H. Soft computing approach for sensorless control in brakeby-wire systems with electro-mechanical brake[D]. Daegu: Department of Information and Communication Engineering of DGIST, 2017. |
| [19] | De C R, Todeschini F, Araujo R E, et al. Adaptive-robust friction compensation in a hybrid brake-by-wire actuator[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2014, 228(10): 769-786. |
| [20] | Ma R, Zhang H Y, Yuan M H, et al. Chattering suppression fast terminal sliding mode control for aircraft EMA braking system[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1901-1914. |
| [21] | 赵逸云, 林辉, 李兵强. 电子机械制动系统无压力传感器控制策略[J]. 北京航空航天大学学报, 2023, 49(10): 2711-2720. |
| Zhao Yi-yun, Lin Hui, Li Bing-qiang. Clamping force sensorless control strategies for electromechanical brake systems[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(10): 2711-2720. | |
| [22] | 张荣芸, 邱天, 时培成, 等. 基于反步鲁棒控制与改进跟踪微分器的PMSM无传感器控制[J]. 电力系统保护与控制, 2023, 51(15): 87-96. |
| Zhang Rong-yun, Qiu Tian, Shi Pei-cheng, et al. Sensorless control of a PMSM based on backstepping robust control and an improved tracking differentiator[J]. Power System Protection and Control, 2023, 51(15): 87-96. | |
| [23] | 葛正, 王维锐, 王俊鼎. 电子机械制动器间隙调整控制策略研究[J]. 浙江大学学报: 工学版, 2017, 51(1): 138-144. |
| Ge Zheng, Wang Wei-rui, Wang Jun-ding. Control strategy for brake clearance adjustment of electronic mechanical brake[J]. Journal of Zhejiang University (Engineering Science), 2017, 51 (1): 138-144. | |
| [24] | 刘志强, 陈玉锦, 陈林. 电子机械制动器的间隙调控方法[J]. 兵工学报, 2022, 43(7): 1478-1487. |
| Liu Zhi-qiang, Chen Yu-jin, Chen Lin. A gap control method for electromechanical brakes[J]. Journal of Ordnance Industry, 2022, 43(7): 1478-1487. | |
| [25] | Li Y, Tan P L, Liu J L, et al. A super-twisting extended state observer for nonlinear systems[J]. Mathematics, 2022, 10(19): No.3584. |
| [26] | 谭草, 任浩鑫, 葛文庆, 等. 直驱阀控液压振动平台改进自抗扰控制[J]. 吉林大学学报: 工学版, 2025, 55(1): 84-92. |
| Tan Cao, Ren Hao-xin, Ge Wen-qing, et al. Improved active disturbance rejection control for hydraulic vibration stages based on the direct-drive value[J]. Journal of Jilin University (Engineering and Technology Edition), 2025, 55(1): 84-92. | |
| [27] | 谭草, 鲁应涛, 葛文庆, 等. 直驱式永磁直线电机深度模糊滑模-自抗扰控制[J]. 西安交通大学学报, 2023, 57(1): 185-194. |
| Tan Cao, Lu Ying-tao, Ge Wen-qing, et al. Deep fuzzy sliding-mode active disturbance rejection control method of permanent magnet linear motor for direct drive system[J]. Journal of Xi'an Jiaotong University, 2023, 57(1): 185-194. | |
| [28] | Yan R D, Wu Z. Super-twisting disturbance observer-based finite-time attitude stabilization of flexible spacecraft subject to complex disturbances[J]. Journal of Vibration and Control, 2019, 25(5): 1008-1018. |
| [29] | 林飞飞, 曾喆昭. 不确定分数阶时滞混沌系统自适应神经网络同步控制[J]. 物理学报, 2017, 66(9): 40-49. |
| Lin Fei-fei, Zeng Zhe-zhao. Synchronization of uncertain fractional-order chaotic systems with time delay based on adaptive neural network control[J]. Acta Physica Sinica, 2017, 66(9): 40-49. | |
| [30] | 张合新, 范金锁, 孟飞, 等. 一种新型滑模控制双幂次趋近律[J]. 控制与决策, 2013, 28(2): 289-293. |
| Zhang He-xin, Fan Jin-suo, Meng Fei, et al. A new double power reaching law for sliding mode control [J]. Control and Decision Making, 2013, 28(2): 289-293. | |
| [31] | Yu S H, Yu X H, Shirinzadeh B, et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964. |
| [1] | 高镇海,鲍明喜,赵睿,唐明弘,高菲. 基于目标锚点驱动的多模态轨迹预测方法[J]. 吉林大学学报(工学版), 2026, 56(1): 21-30. |
| [2] | 张向文,王子豪. 电动汽车制动模式切换过程电液协调控制策略[J]. 吉林大学学报(工学版), 2026, 56(1): 31-43. |
| [3] | 兰巍,周政,王冠宇,王伟,张苗苗. 基于机器学习的汽车设计智能拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2858-2863. |
| [4] | 孙天骏,杨惠喆,蔡荣贵,冯嘉仪,冉锐,刘斌. 面向纯电动汽车自适应巡航系统的人性化起停控制策略[J]. 吉林大学学报(工学版), 2025, 55(9): 2847-2857. |
| [5] | 李寿涛,贾湘怡,朱军,郭洪艳,于丁力. 基于Level-K的智能驾驶汽车无信控交叉路口决策方法[J]. 吉林大学学报(工学版), 2025, 55(9): 3069-3078. |
| [6] | 朱冰,孟鹏翔,刘斌,韩嘉懿,赵健,陈志成,宋东鉴,陶晓文. 基于交通环境信息的虚拟车道线拟合方法[J]. 吉林大学学报(工学版), 2025, 55(9): 2935-2945. |
| [7] | 赵俊武,曲婷,胡云峰. 基于自适应采样的智能车辆轨迹规划方法[J]. 吉林大学学报(工学版), 2025, 55(8): 2802-2816. |
| [8] | 于贵申,陈鑫,唐悦,赵春晖,牛艾佳,柴辉,那景新. 激光表面处理对铝-铝粘接接头剪切强度的影响[J]. 吉林大学学报(工学版), 2025, 55(8): 2555-2569. |
| [9] | 高金武,孙少龙,王舜尧,高炳钊. 基于电机转矩补偿的增程器转速波动抑制策略[J]. 吉林大学学报(工学版), 2025, 55(8): 2475-2486. |
| [10] | 贾美霞,胡建军,肖凤. 基于多软件联合的车用电机变工况多物理场仿真方法[J]. 吉林大学学报(工学版), 2025, 55(6): 1862-1872. |
| [11] | 宋学伟,于泽平,肖阳,王德平,袁泉,李欣卓,郑迦文. 锂离子电池老化后性能变化研究进展[J]. 吉林大学学报(工学版), 2025, 55(6): 1817-1833. |
| [12] | 肖纯,易子淳,周炳寅,张少睿. 基于改进鸽群优化算法的燃料电池汽车模糊能量管理策略[J]. 吉林大学学报(工学版), 2025, 55(6): 1873-1882. |
| [13] | 李伟东,马草原,史浩,曹衡. 基于分层强化学习的自动驾驶决策控制算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1798-1805. |
| [14] | 卢荡,索艳茹,孙宇航,吴海东. 基于无量纲格式的轮胎侧倾侧偏力学特性预测[J]. 吉林大学学报(工学版), 2025, 55(5): 1516-1524. |
| [15] | 高镇海,郑程元,赵睿. 真实与虚拟场景下自动驾驶车辆的主动安全性验证与确认综述[J]. 吉林大学学报(工学版), 2025, 55(4): 1142-1162. |
|
||