吉林大学学报(工学版) ›› 2018, Vol. 48 ›› Issue (6): 1661-1668.doi: 10.13229/j.cnki.jdxbgxb20170878
转向架动态模拟试验台避撞模型的构建
刘玉梅1( ),刘丽1,曹晓宁2,熊明烨3,庄娇娇1
),刘丽1,曹晓宁2,熊明烨3,庄娇娇1
- 1. 吉林大学 交通学院,长春 130022
2. 中车青岛四方机车车辆股份有限公司,山东 青岛 266111
3. 伊利诺伊大学厄巴纳香槟分校 电子与计算机工程系,美国 伊利诺伊州61801
Construction on collision avoidance model of bogie dynamic simulation test bench
LIU Yu-mei1(),LIU Li1,CAO Xiao-ning2,XIONG Ming-ye3,ZHUANG Jiao-jiao1
- 1. College of Transportation,Jilin University,Changchun 130022,China
2. CRRC Qingdao Sifang Co.Ltd.,Qingdao 266111,China
3. Department of Electronic and Computer Engineering,University of Illinois at Urbana-Champaign,Illinois 61801,USA
摘要:
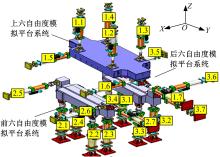
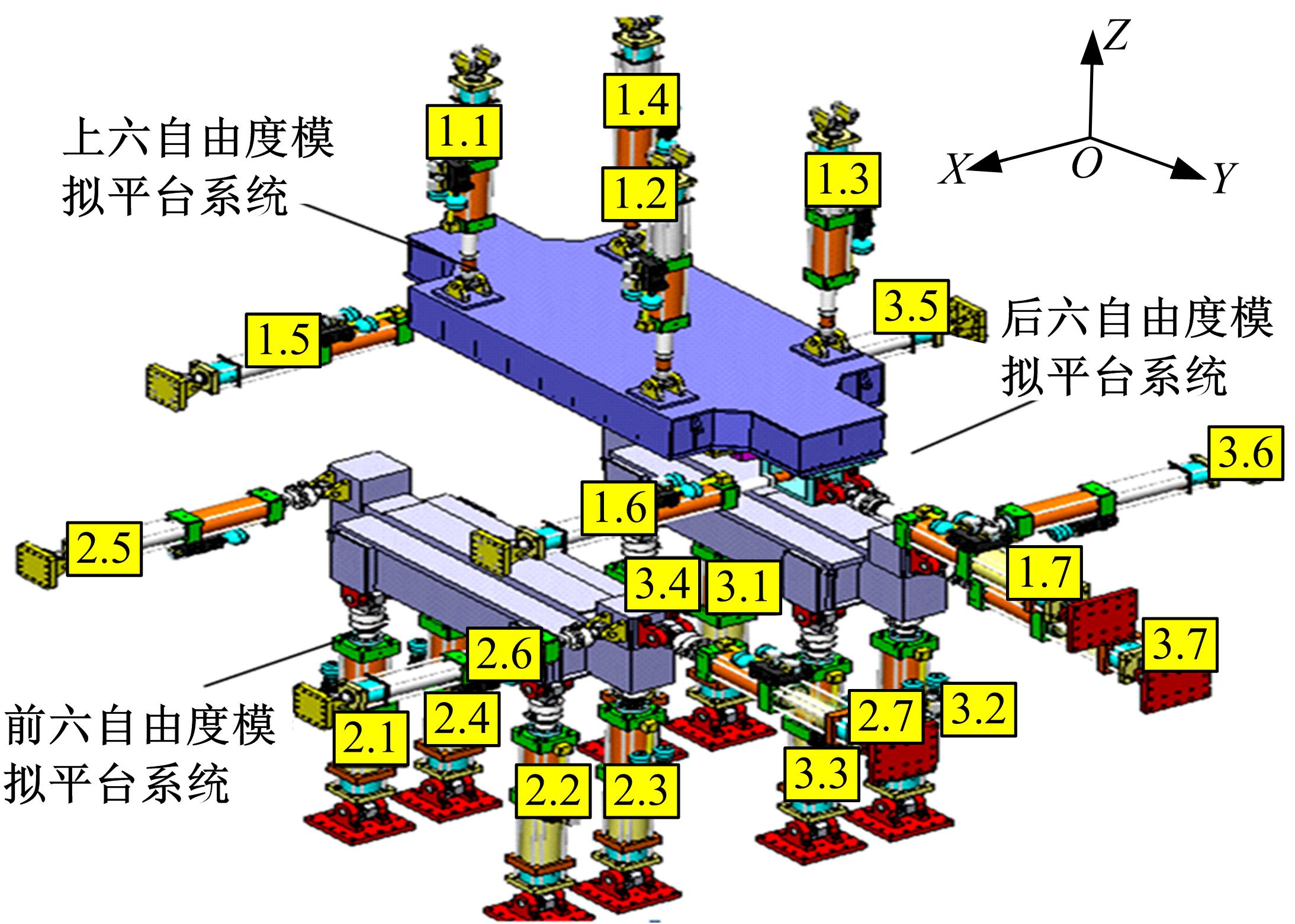
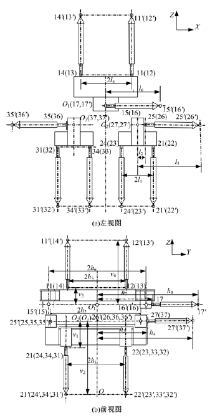
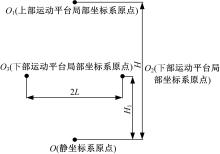
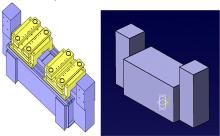
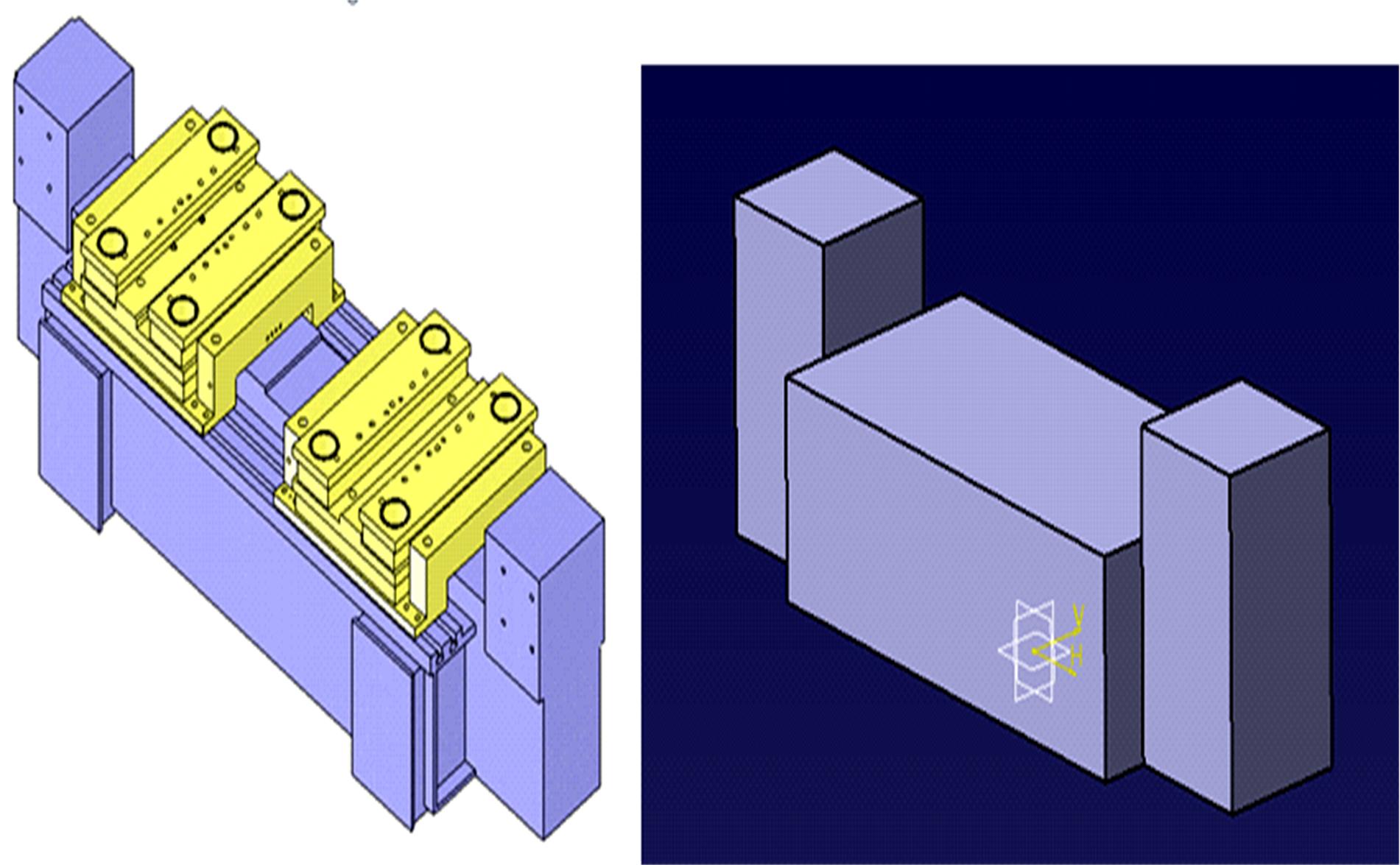
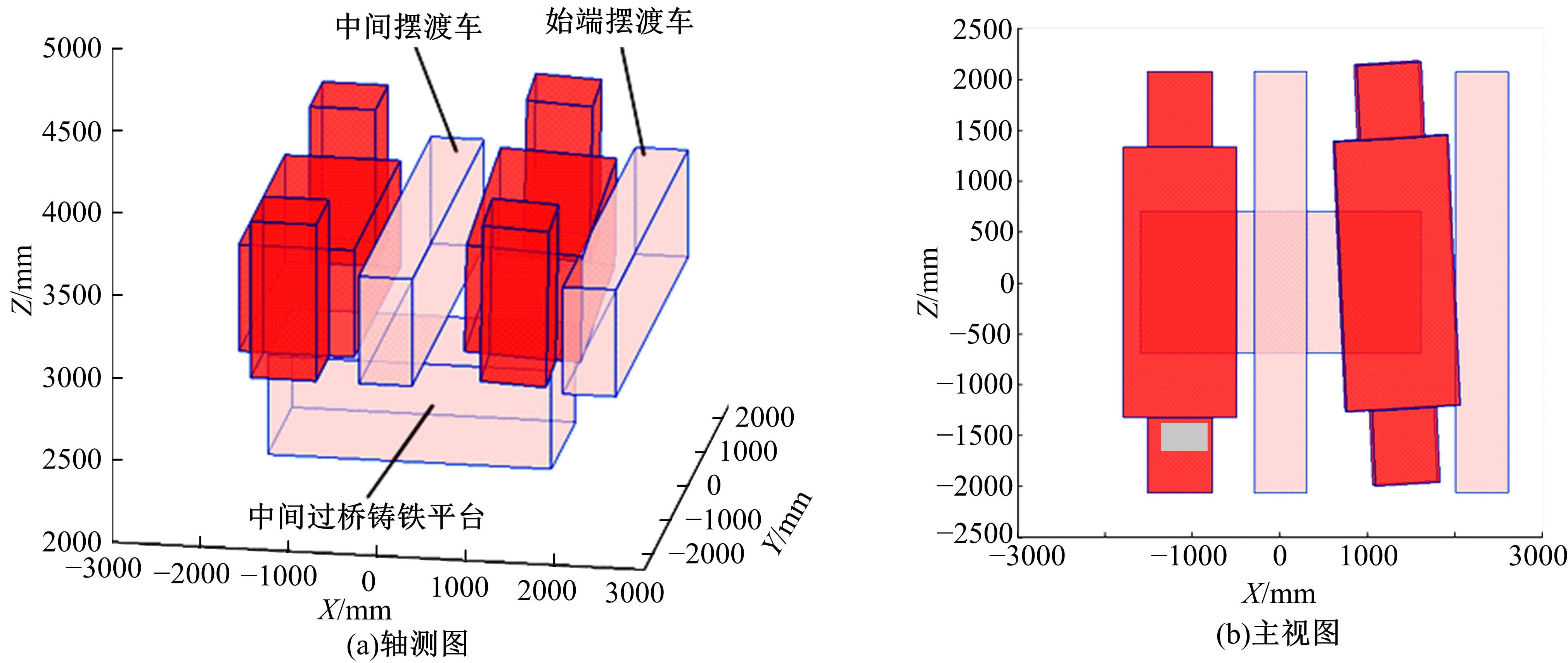
利用齐次坐标矩阵和齐次坐标变换矩阵建立3个六自由度运动平台位姿反解模型,采用包围盒方法对运动平台和垂向作动器周围障碍物进行简化。根据空间运动学及空间凸多面体数值表述理论,建立运动平台及垂向作动器与周围障碍物之间的避撞检测模型,通过计算两物体之间的最短距离来判断某位姿下两物体是否发生碰撞。结合实例,利用Matlab仿真,验证了所建避撞模型的正确性,从而为运动平台及运动平台的垂向作动器避免发生碰撞提供有效数据。
中图分类号:
- U461



| [1] | 段清娟 . 基于任务划分的多机器人协调与跟踪控制研究[D]. 西安:西北工业大学机电学院, 2006. |
| Duan Qing-juan . Research on task-partitioned multi-robot coordination and tracking control [D].Xi'an:School of Electromechanics, Northwestern Polytechnical University, 2006. | |
| [2] | 曹晓宁, 刘玉梅, 苏建 , 等. 转向架质心高度的测定[J]. 吉林大学学报:工学版, 2013,43(2):329-334. |
| Cao Xiao-ning, Liu Yu-mei, Su Jian , et al. Determination of mass center height of bogie[J]. Journal of Jilin University (Engineering and Technology Edition), 2013,43(2):329-334. | |
| [3] |
刘玉梅, 曹晓宁, 赵聪聪 , 等. 基于六自由度平台的轨道不平顺几何信息模拟[J]. 西南交通大学学报, 2014,49(6):1002-1009.
doi: 10.3969/j.issn.0258-2724.2014.06.011 |
|
Liu Yu-mei, Cao Xiao-ning, Zhao Cong-cong , et al. Geometry simulation of track torsion-irregularity based on 6-DOF platform[J]. Journal of Southwest Jiaotong University, 2014,49(6):1002-1009.
doi: 10.3969/j.issn.0258-2724.2014.06.011 |
|
| [4] | 曹晓宁 . 高速列车转向架测试台3-六自由度平台运动学及工作空间研究[D]. 长春:吉林大学交通学院, 2013. |
| Cao Xiao-ning . Study on kinematics and workspace of three six-dof platform high-speed train bogie test bench[D]. Changchun:College of Transportation Jilin University,2013. | |
| [5] |
Huang Xi-guang . Forword displacement analysis of a parallel manipulator[J]. Advanced Materials Research, 2011, 217-218:1061-1065.
doi: 10.4028/www.scientific.net/AMR.217-218.1061 |
| [6] |
刘玉梅, 曹晓宁, 苏建 , 等. 转向架测试6自由度模拟平台位姿正解解算[J]. 江苏大学学报:自然科学版, 2012,33(6):621-626.
doi: 10.3969/j.issn.1671-7775.2012.06.001 |
|
Liu Yu-mei, Cao Xiao-ning, Su Jian , et al. Forward kinematics solution of 6 degree of freedom simulation platform for bogie test[J]. Journal of Jiangsu University (Natural Science Edition), 2012,33(6):621-626.
doi: 10.3969/j.issn.1671-7775.2012.06.001 |
|
| [7] | Krishnamurthy P, Khorrami F, Fujikawa S. A modeling framework for six degree-of-freedom control of unmanned sea surface vehicles [C]//Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference,Seville,Spain, 2005: 2676-2681. |
| [8] | Liu Yu-mei, Cao Xiao-ning, Su Jian, et al. The pose real-time solution and control of the 6-DOF loading platform for bogie test [C]//Proceedings 2011 International Conference on Transportation, Mechanical, and Electrical Engineering.USA:IEEE Computer Society, 2011: 2294-2297. |
| [9] |
王培俊, 王文静, 陈鹏 , 等. 基于OBB算法和前向预防的快速碰撞检测[J]. 西南交通大学学报, 2011,46(6):1003-1007.
doi: 10.3969/j.issn.0258-2724.2011.06.019 |
|
Wang Pei-jun, Wang Wen-jing, Chen Peng , et al. Rapid collision detection based on OBB algorithm and penetration avoidance mechanism[J]. Journal of Southwest Jiaotong University, 2011,46(6):1003-1007.
doi: 10.3969/j.issn.0258-2724.2011.06.019 |
|
| [10] |
曲慧雁, 赵伟, 秦爱红 . 基于优化算子的快速碰撞检测法[J]. 吉林大学学报:工学版, 2017,47(5):1598-1603.
doi: 10.13229/j.cnki.jdxbgxb201705036 |
|
Qu Hui-yan, Zhao Wei, Qin Ai-hong . A fast collision detection algorithm based on optimization operator[J]. Journal of Jilin University (Engineering and Technology Edition), 2017,47(5):1598-1603.
doi: 10.13229/j.cnki.jdxbgxb201705036 |
|
| [11] |
陈俊超, 李刚 . 一种抗遮挡的多运动目标跟踪改进算法[J]. 小型微型计算机系统, 2012,33(2):307-310.
doi: 10.3969/j.issn.1000-1220.2012.02.024 |
|
Chen Jun-chao, Li Gang . Improved anti-occlusion tracking algorithm of multiple moving object[J]. Journal of Chinese Computer Systems, 2012,33(2):307-310.
doi: 10.3969/j.issn.1000-1220.2012.02.024 |
| [1] | 常成,宋传学,张雅歌,邵玉龙,周放. 双馈电机驱动电动汽车变频器容量最小化[J]. 吉林大学学报(工学版), 2018, 48(6): 1629-1635. |
| [2] | 席利贺,张欣,孙传扬,王泽兴,姜涛. 增程式电动汽车自适应能量管理策略[J]. 吉林大学学报(工学版), 2018, 48(6): 1636-1644. |
| [3] | 何仁,杨柳,胡东海. 冷藏运输车太阳能辅助供电制冷系统设计及分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1645-1652. |
| [4] | 那景新,慕文龙,范以撒,谭伟,杨佳宙. 车身钢-铝粘接接头湿热老化性能[J]. 吉林大学学报(工学版), 2018, 48(6): 1653-1660. |
| [5] | 宋大凤, 吴西涛, 曾小华, 杨南南, 李文远. 基于理论油耗模型的轻混重卡全生命周期成本分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1313-1323. |
| [6] | 朱剑峰, 张君媛, 陈潇凯, 洪光辉, 宋正超, 曹杰. 基于座椅拉拽安全性能的车身结构改进设计[J]. 吉林大学学报(工学版), 2018, 48(5): 1324-1330. |
| [7] | 金立生, 谢宪毅, 高琳琳, 郭柏苍. 基于二次规划的分布式电动汽车稳定性控制[J]. 吉林大学学报(工学版), 2018, 48(5): 1349-1359. |
| [8] | 王德军, 魏薇郦, 鲍亚新. 考虑侧风干扰的电子稳定控制系统执行器故障诊断[J]. 吉林大学学报(工学版), 2018, 48(5): 1548-1555. |
| [9] | 赵伟强, 高恪, 王文彬. 基于电液耦合转向系统的商用车防失稳控制[J]. 吉林大学学报(工学版), 2018, 48(5): 1305-1312. |
| [10] | 那景新, 浦磊鑫, 范以撒, 沈传亮. 湿热环境对Sikaflex-265铝合金粘接接头失效强度的影响[J]. 吉林大学学报(工学版), 2018, 48(5): 1331-1338. |
| [11] | 王炎, 高青, 王国华, 张天时, 苑盟. 混流集成式电池组热管理温均特性增效仿真[J]. 吉林大学学报(工学版), 2018, 48(5): 1339-1348. |
| [12] | 隗海林, 包翠竹, 李洪雪, 李明达. 基于最小二乘支持向量机的怠速时间预测[J]. 吉林大学学报(工学版), 2018, 48(5): 1360-1365. |
| [13] | 胡满江, 罗禹贡, 陈龙, 李克强. 基于纵向频响特性的整车质量估计[J]. 吉林大学学报(工学版), 2018, 48(4): 977-983. |
| [14] | 张曼, 施树明. 典型汽车运行工况的状态转移特征分析[J]. 吉林大学学报(工学版), 2018, 48(4): 1008-1015. |
| [15] | 刘国政, 史文库, 陈志勇. 考虑安装误差的准双曲面齿轮传动误差有限元分析[J]. 吉林大学学报(工学版), 2018, 48(4): 984-989. |
|