吉林大学学报(工学版) ›› 2018, Vol. 48 ›› Issue (6): 1636-1644.doi: 10.13229/j.cnki.jdxbgxb20170873
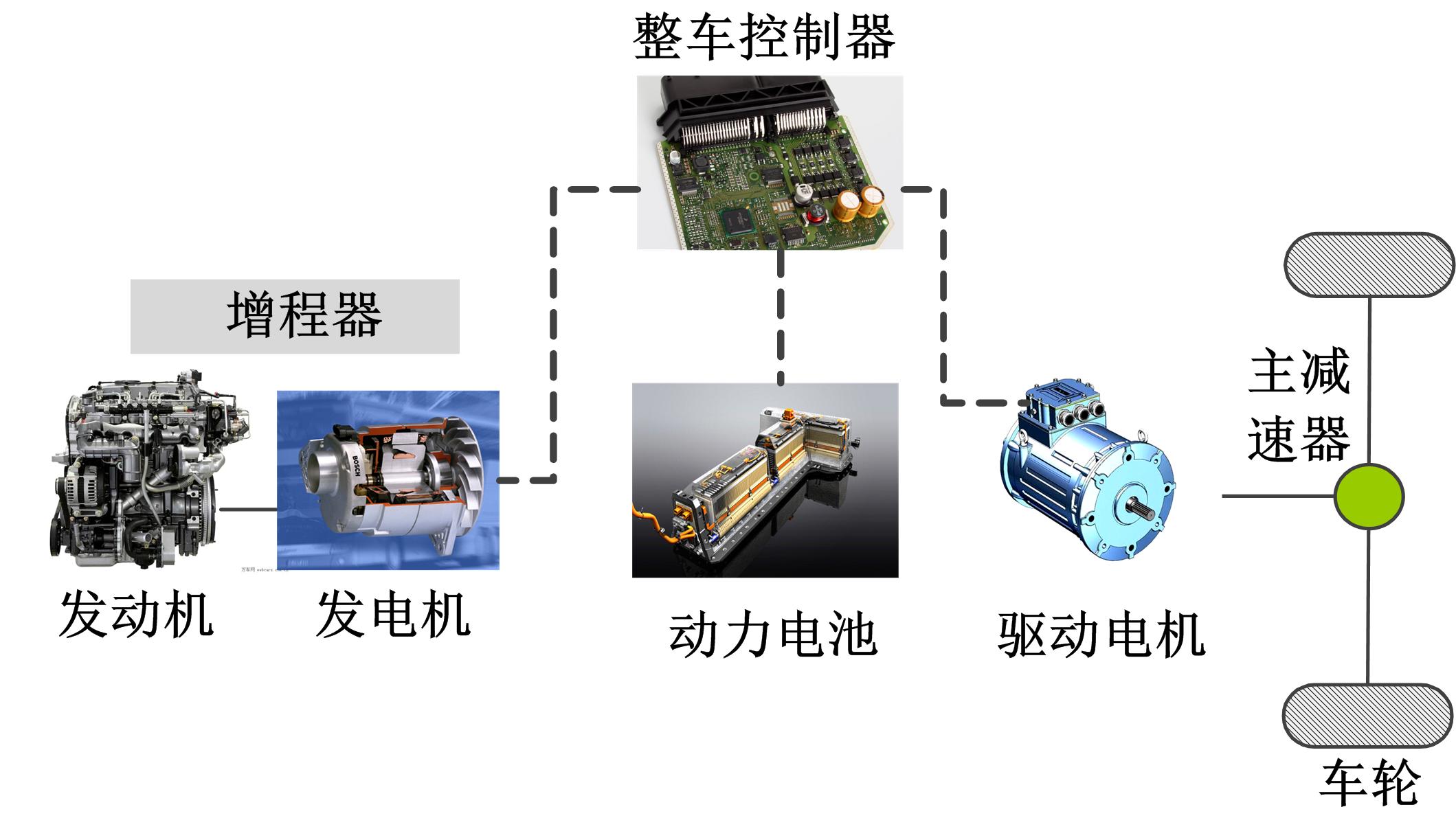
增程式电动汽车自适应能量管理策略
席利贺1( ),张欣1(),孙传扬1,王泽兴2,姜涛1
),张欣1(),孙传扬1,王泽兴2,姜涛1
- 1. 北京交通大学 新能源汽车动力总成技术北京市重点实验室, 北京 100044
2. 北京新能源股份有限公司 工程研究院,北京102606
Adaptive energy management strategy for extended range electric vehicle
XI Li-he1(),ZHANG Xin1(),SUN Chuan-yang1,WANG Ze-xing2,JIANG Tao1
- 1. Beijing Key Laboratory of Powertrain for New Energy Vehicle, Beijing Jiaotong University, Beijing 100044,China
2. Engineering Research Institute, Beijing Electric Vehicle, Beijing 102606,China
摘要:
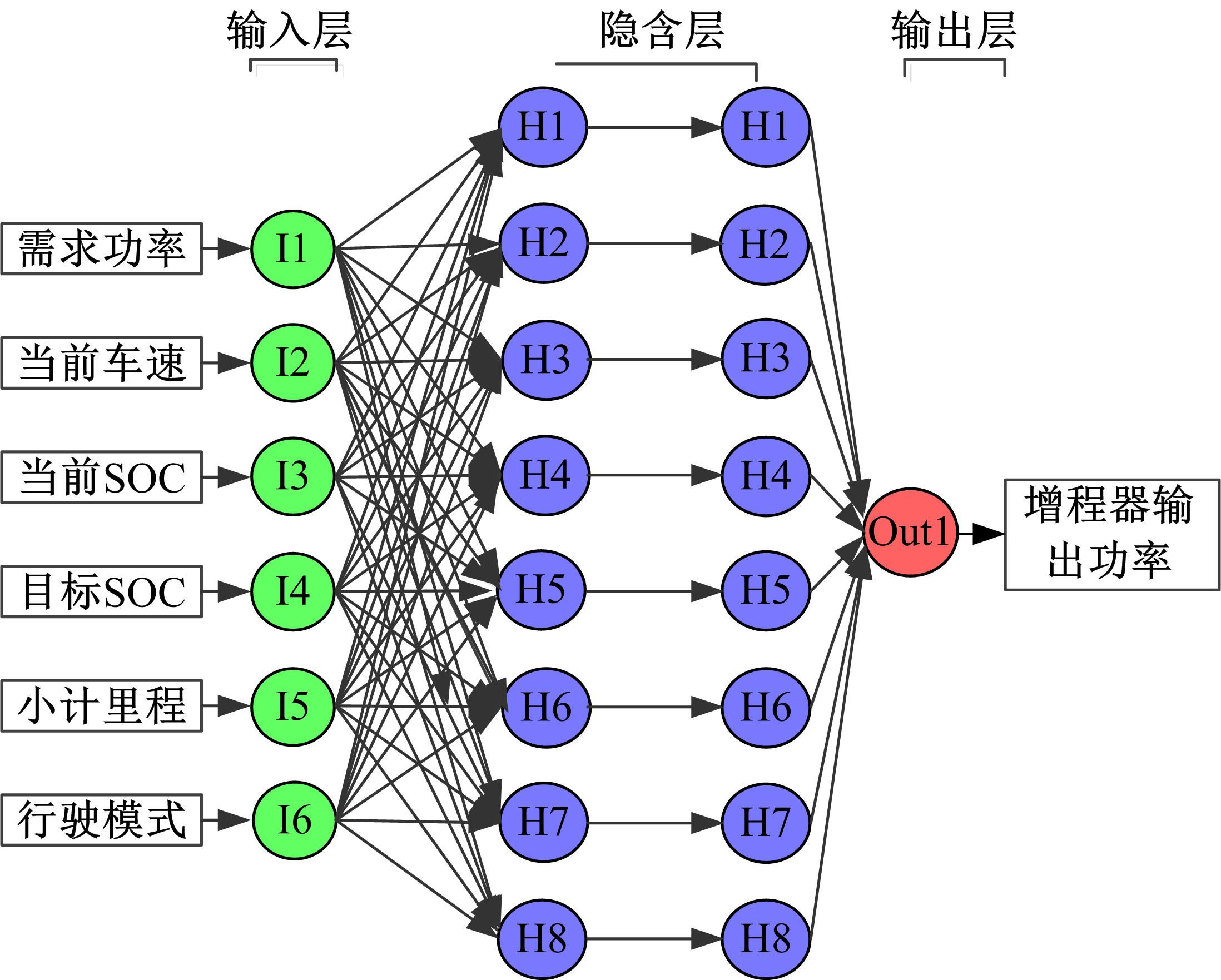
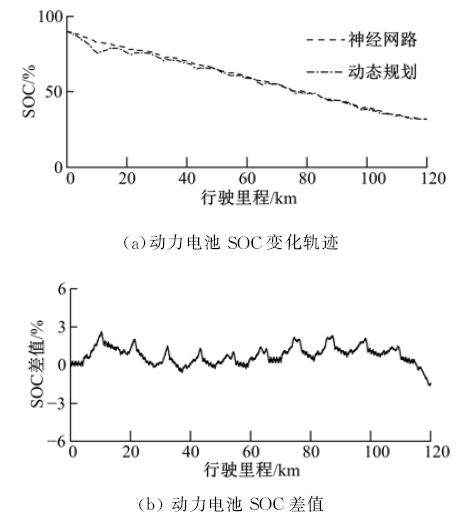
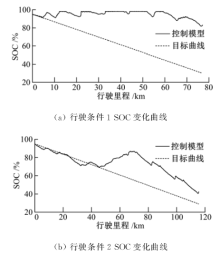
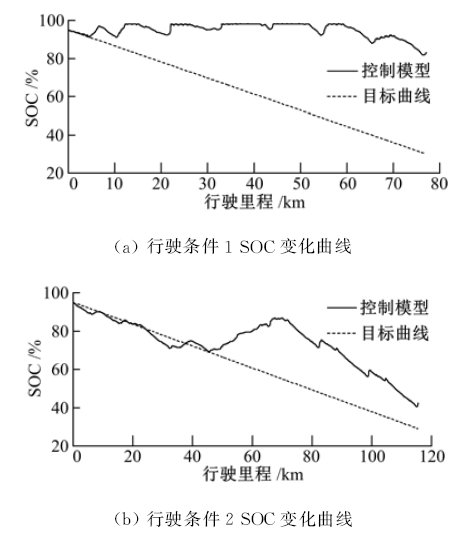
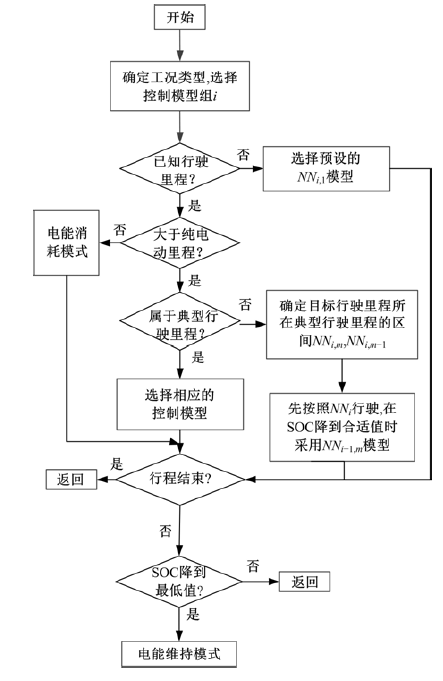
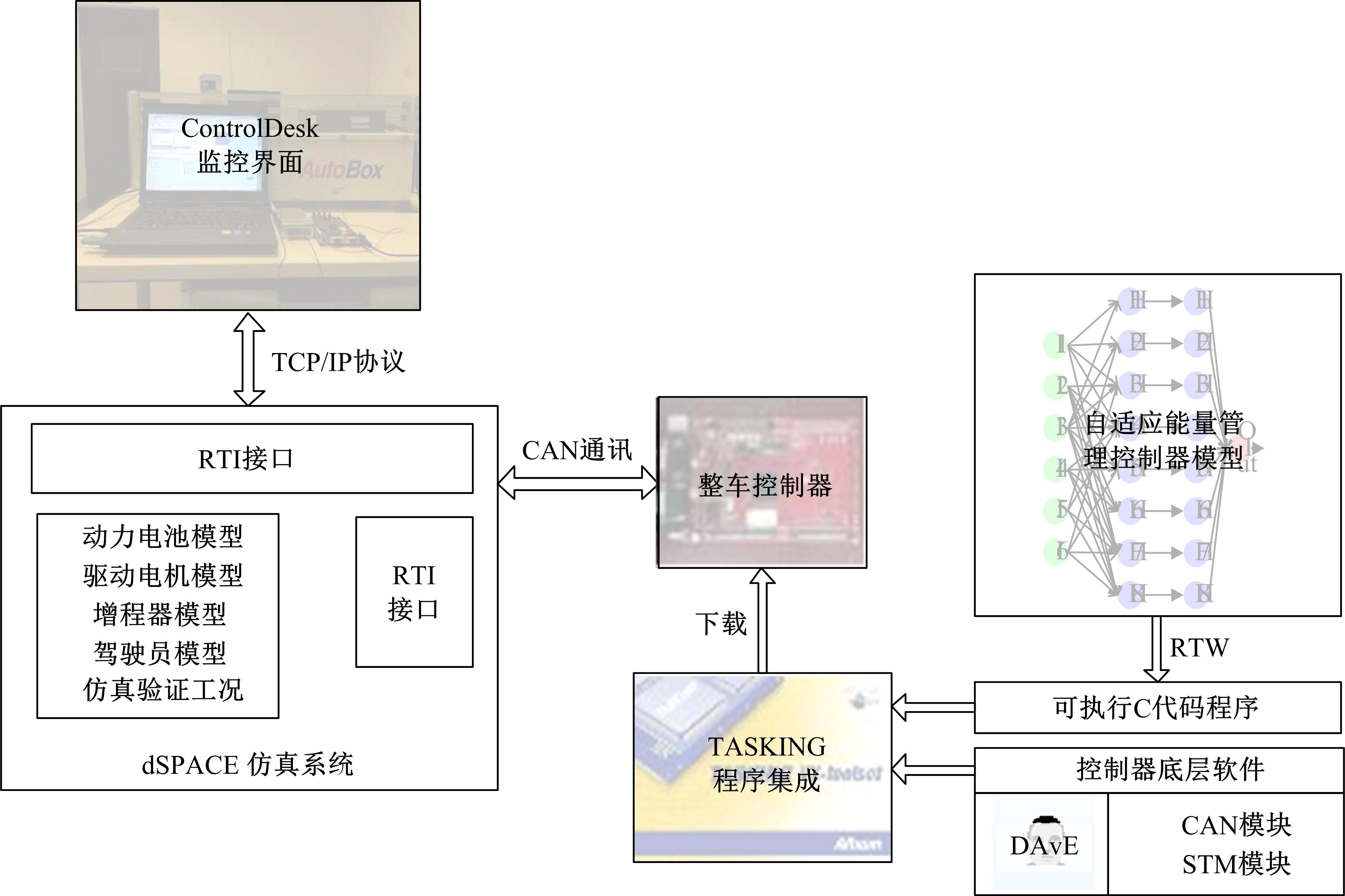
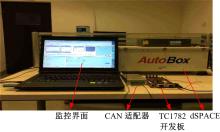
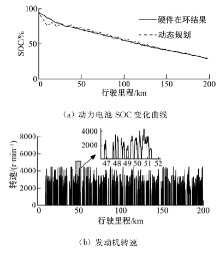
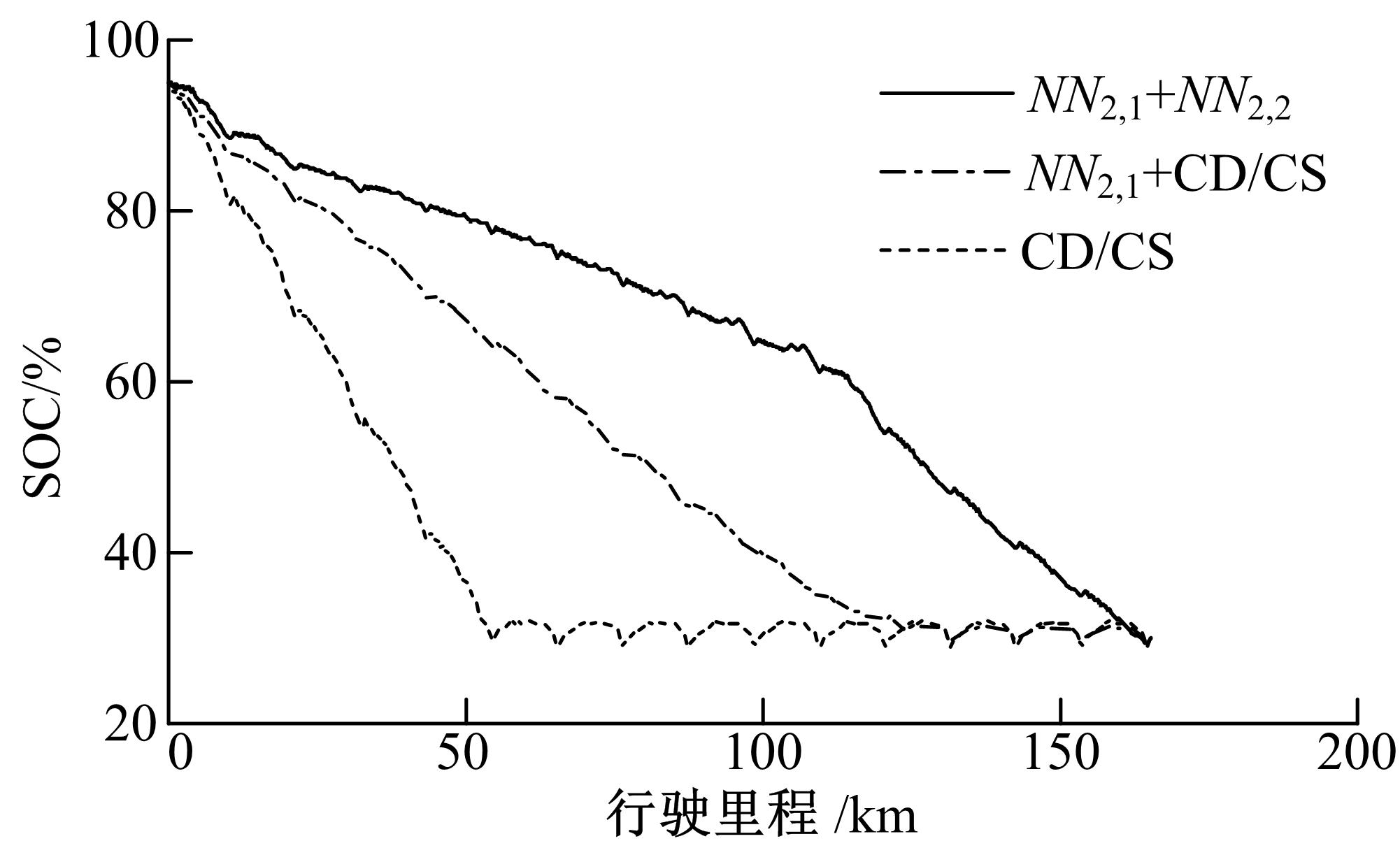
以增程式电动汽车到达充电站时,动力电池电量处于较低水平为控制目标,设计了以燃油消耗最小与动力电池荷电状态(SOC)沿目标曲线变化的双目标代价函数,并采用动态规划算法进行优化求解。为实现在线最优控制,采用BP神经网络对优化结果进行训练学习,得到控制模型。仿真结果表明,所训练的控制模型对于动态规划优化结果具有很好的学习效果,SOC偏离误差在3%以内。最后,为解决控制模型仅适用于特定工况与行驶里程的问题,设计了一种自适应能量管理控制器,其包括运行状态识别模块、控制模型库、控制模型选择模块等。硬件在环试验表明,所设计的控制器能够控制SOC在仿真结束时刚好降到最低值,在乘用车高速公路燃油经济性测试循环(HWFET)工况下,该控制器相比电量消耗/电量维持算法燃油经济性提高了9.2%。
中图分类号:
- U469.72








| [1] |
宋传学, 王达, 宋世欣 , 等. 基于动力分布设计的增程式电动汽车[J]. 吉林大学学报:工学版, 2015,45(3):681-688.
doi: 10.13229/j.cnki.jdxbgxb201503001 |
|
Song Chuan-xue, Wang Da, Song Shi-xin , et al. Extended-range electric vehicle based on power distribution design[J]. Journal of Jilin University (Engineering and Technology Edition), 2015,45(3):681-688.
doi: 10.13229/j.cnki.jdxbgxb201503001 |
|
| [2] |
Song Wen, Zhang Xin, Tian Yi , et al. A charging management-based intelligent control strategy for extended-range electric vehicles.[J]. Journal of Zhejiang University-SCIENCE A (Applied Physics & Engineering), 2016,17(11):903-910.
doi: 10.1631/jzus.A1600036 |
| [3] |
Wirasingha S G, Emadi A . Classification and review of control strategies for plug-in hybrid electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2011,60(1):111-122.
doi: 10.1109/TVT.2010.2090178 |
| [4] |
秦大同, 杨官龙, 胡明辉 , 等. 基于驾驶意图的插电式混合动力汽车能量管理策略[J]. 吉林大学学报:工学版, 2015,45(6):1743-1750.
doi: 10.13229/j.cnki.jdxbgxb201506002 |
|
Qin Da-tong, Yang Guan-long, Hu Ming-hui , et al. Energy management strategy of plug-in hybrid electric system based on driving intention[J]. Journal of Jilin University (Engineering and Technology Edition), 2015,45(6):1743-1750.
doi: 10.13229/j.cnki.jdxbgxb201506002 |
|
| [5] | Banvait H, Anwar S, Chen Y. A rule-based energy management strategy for plug-in hybrid electric vehicle (PHEV) [C]//Proceedings of the American Control Conference, St. Louis, Mo,USA, 2009: 3938-3943. |
| [6] | Sharer P B, Rousseau A, Karbowski D , et al. Plug-in hybrid electric vehicle control strategy: comparison between EV and charge-depleting options[C]// SAE Paper, 2008-01-0460. |
| [7] | 余志生 . 汽车理论[M]. 北京: 机械工业出版社, 2009. |
| [8] | 赵轩, 马建, 刘瑞 , 等. 基于GGAP-RBF神经网络的多参数纯电动客车蓄电池荷电状态预测[J]. 中国公路学报, 2015,28(4):116-126. |
| Zhao Xuan, Ma Jian, Liu Rui , et al. Multiple parameters state-of-charge estimation of battery for pure electric bus based on GGAP-RBF neural network[J]. China Journal of Highway & Transport, 2015,28(4):116-126. | |
| [9] | Lin C C, Peng H, Jeon S , et al. Control of a hybrid electric truck based on driving pattern recognition. Proc of the 2002 Advanced Vehicle Control Conference, Hiroshima, Japan, 2002. |
| [10] |
Chen B C, Wu Y Y, Tsai H C . Design and analysis of power management strategy for range extended electric vehicle using dynamic programming[J]. Appl Energy 2014,113(1):1764-1774.
doi: 10.1016/j.apenergy.2013.08.018 |
| [11] | 北京日报. 使用强度过高亟待引导[N]. . |
| [12] |
王俊, 王庆年, 曾小华 , 等. 混合动力客车能量管理设计及硬件在环试验验证[J]. 吉林大学学报:工学版, 2014,44(5):1225-1232.
doi: 10.7964/jdxbgxb201405001 |
|
Wang Jun, Wang Qing-nian, Zeng Xiao-hua , et al. Energy management design of hybrid buses and hardware verification in loop test[J]. Journal of Jilin University (Engineering and Technology Edition), 2014,44(5):1225-1232.
doi: 10.7964/jdxbgxb201405001 |
|
| [13] |
李国岫, 张欣, 宋建锋 . 并联式混合动力电动汽车动力总成控制器硬件在环仿真[J]. 中国公路学报, 2006,19(1):108-112.
doi: 10.3321/j.issn:1001-7372.2006.01.023 |
|
Liu Guo-xiu, Zhang Xin, Song Jian-feng . Hardware in loop simulation for powertrain controller of parallel hybrid electric vehicle[J]. China Journal of Highway & Transport, 2006,19(1):108-112.
doi: 10.3321/j.issn:1001-7372.2006.01.023 |
|
| [14] | 牛继高, 司璐璐, 周苏 , 等. 增程式电动汽车能量控制策略的仿真分析[J]. 上海交通大学学报, 2014,48(1):140-145. |
| Niu Ji-gao, Si Lu-lu, Zhou Su , et al. Simulation analysis of energy control strategy for an extended-Range electric vehicle[J]. Journal of Shanghai Jiaotong University, 2014,48(1):140-145. |
| [1] | 陈磊,王江锋,谷远利,闫学东. 基于思维进化优化的多源交通数据融合算法[J]. 吉林大学学报(工学版), 2019, 49(3): 705-713. |
| [2] | 赖晴鹰,刘军,赵若愚,骆泳吉,孟令云,徐亚之. 基于变间距动态规划的中高速磁悬浮列车 速度曲线优化[J]. 吉林大学学报(工学版), 2019, 49(3): 749-756. |
| [3] | 欧阳丹彤,肖君,叶育鑫. 基于实体对弱约束的远监督关系抽取[J]. 吉林大学学报(工学版), 2019, 49(3): 912-919. |
| [4] | 杨毅,王斯财,南英. 大型水陆两栖飞机海上最优搜索航路规划算法[J]. 吉林大学学报(工学版), 2019, 49(3): 963-971. |
| [5] | 常成,宋传学,张雅歌,邵玉龙,周放. 双馈电机驱动电动汽车变频器容量最小化[J]. 吉林大学学报(工学版), 2018, 48(6): 1629-1635. |
| [6] | 何仁,杨柳,胡东海. 冷藏运输车太阳能辅助供电制冷系统设计及分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1645-1652. |
| [7] | 那景新,慕文龙,范以撒,谭伟,杨佳宙. 车身钢-铝粘接接头湿热老化性能[J]. 吉林大学学报(工学版), 2018, 48(6): 1653-1660. |
| [8] | 刘玉梅,刘丽,曹晓宁,熊明烨,庄娇娇. 转向架动态模拟试验台避撞模型的构建[J]. 吉林大学学报(工学版), 2018, 48(6): 1661-1668. |
| [9] | 江涛,林学东,李德刚,杨淼,汤雪林. 基于人工神经网络的放热规律的量化预测[J]. 吉林大学学报(工学版), 2018, 48(6): 1747-1754. |
| [10] | 徐岩,孙美双. 基于卷积神经网络的水下图像增强方法[J]. 吉林大学学报(工学版), 2018, 48(6): 1895-1903. |
| [11] | 赵伟强, 高恪, 王文彬. 基于电液耦合转向系统的商用车防失稳控制[J]. 吉林大学学报(工学版), 2018, 48(5): 1305-1312. |
| [12] | 宋大凤, 吴西涛, 曾小华, 杨南南, 李文远. 基于理论油耗模型的轻混重卡全生命周期成本分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1313-1323. |
| [13] | 朱剑峰, 张君媛, 陈潇凯, 洪光辉, 宋正超, 曹杰. 基于座椅拉拽安全性能的车身结构改进设计[J]. 吉林大学学报(工学版), 2018, 48(5): 1324-1330. |
| [14] | 那景新, 浦磊鑫, 范以撒, 沈传亮. 湿热环境对Sikaflex-265铝合金粘接接头失效强度的影响[J]. 吉林大学学报(工学版), 2018, 48(5): 1331-1338. |
| [15] | 王炎, 高青, 王国华, 张天时, 苑盟. 混流集成式电池组热管理温均特性增效仿真[J]. 吉林大学学报(工学版), 2018, 48(5): 1339-1348. |
|