吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (3): 727-735.doi: 10.13229/j.cnki.jdxbgxb20171257
基于RGB熵和改进区域生长的非结构化道路识别方法
吴骅跃( ),段里仁
),段里仁
- 长安大学 信息工程学院,西安 710064
Unstructured road detection method based on RGB entropy and improved region growing
Hua⁃yue WU(),Li⁃ren DUAN
- School of Information Engineering, Chang′an University, Xi′an 710064, China
摘要:
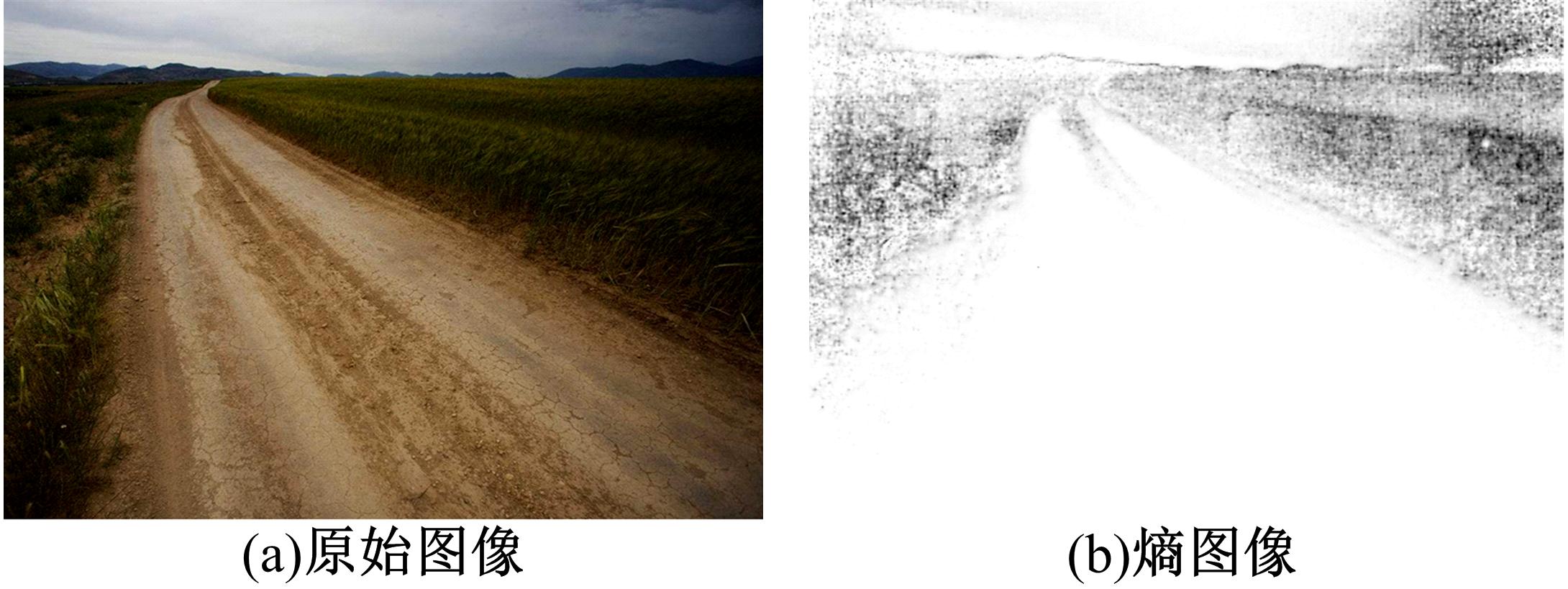
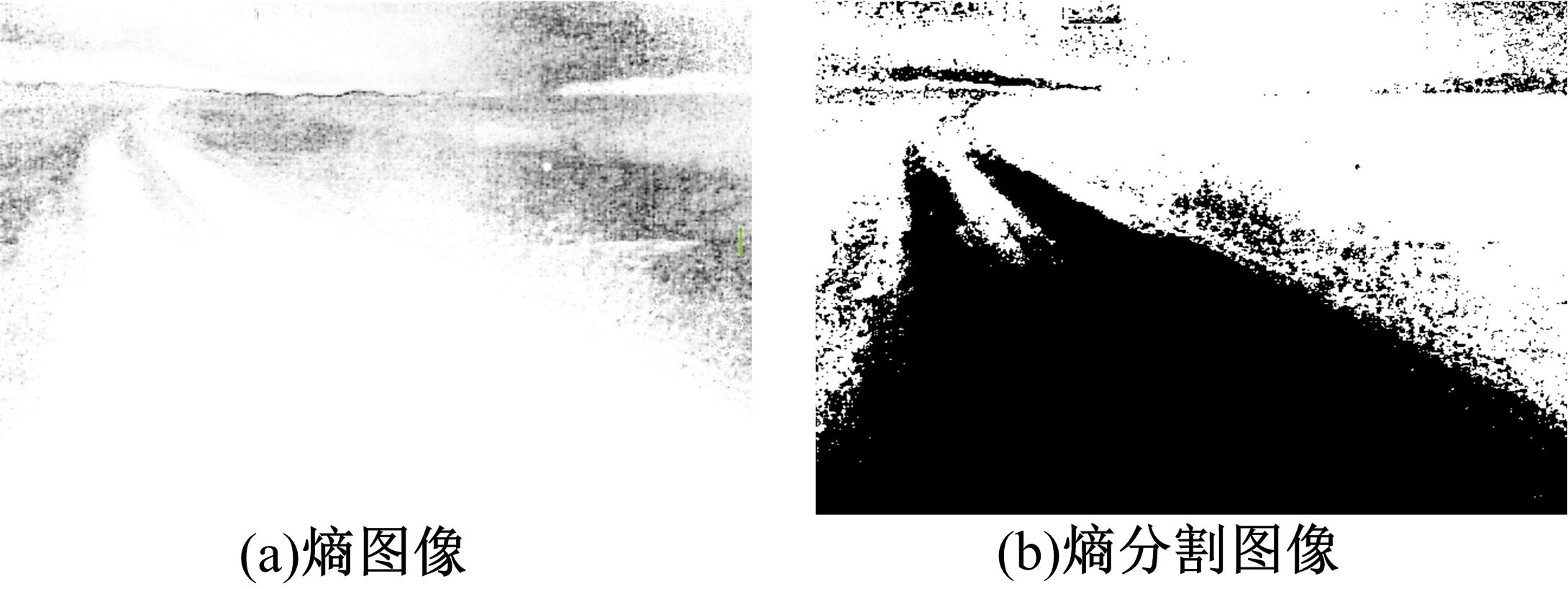
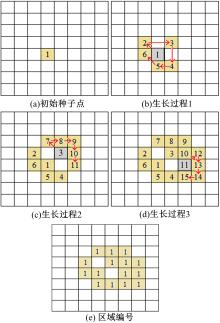
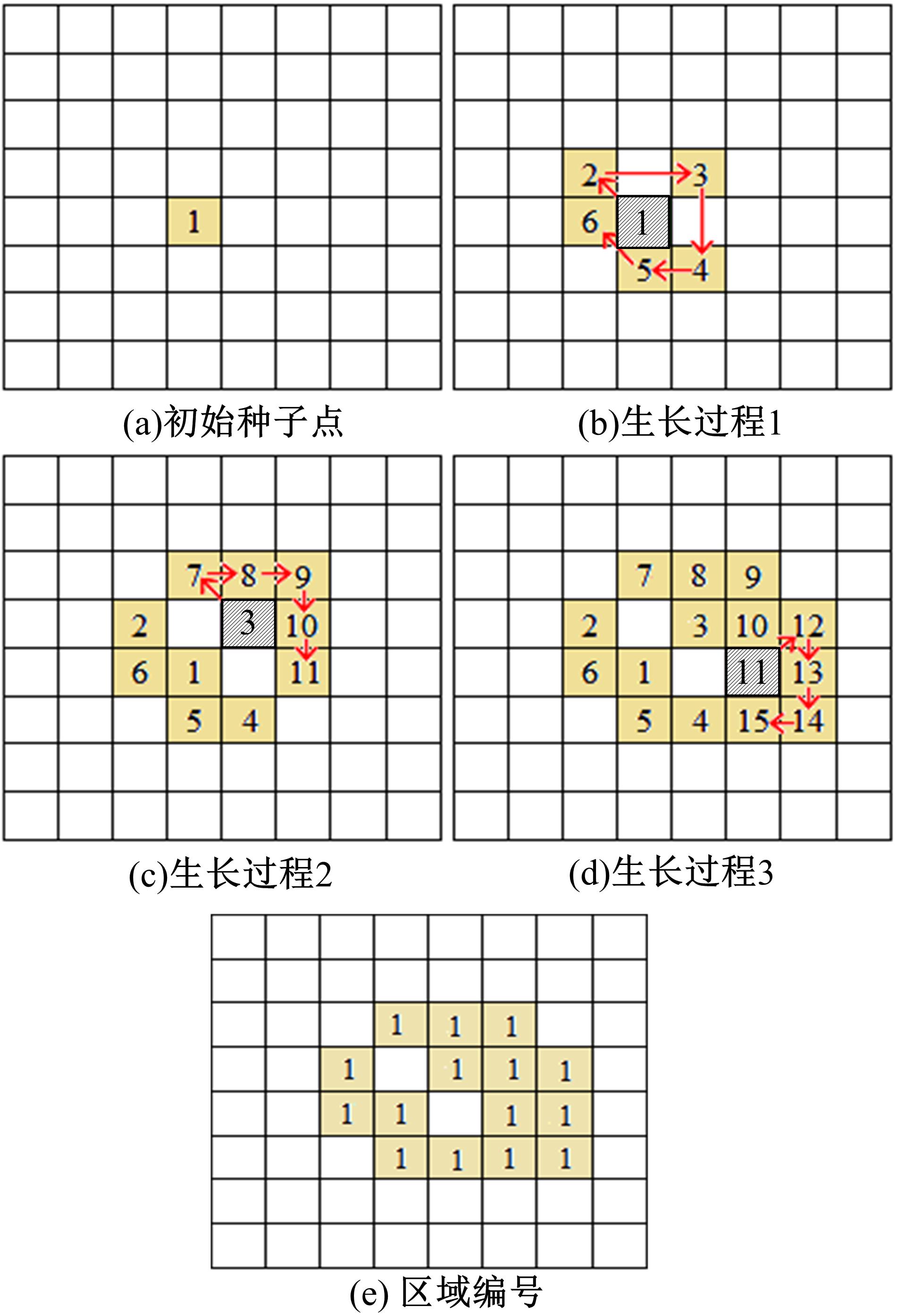
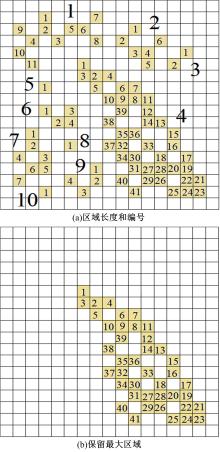
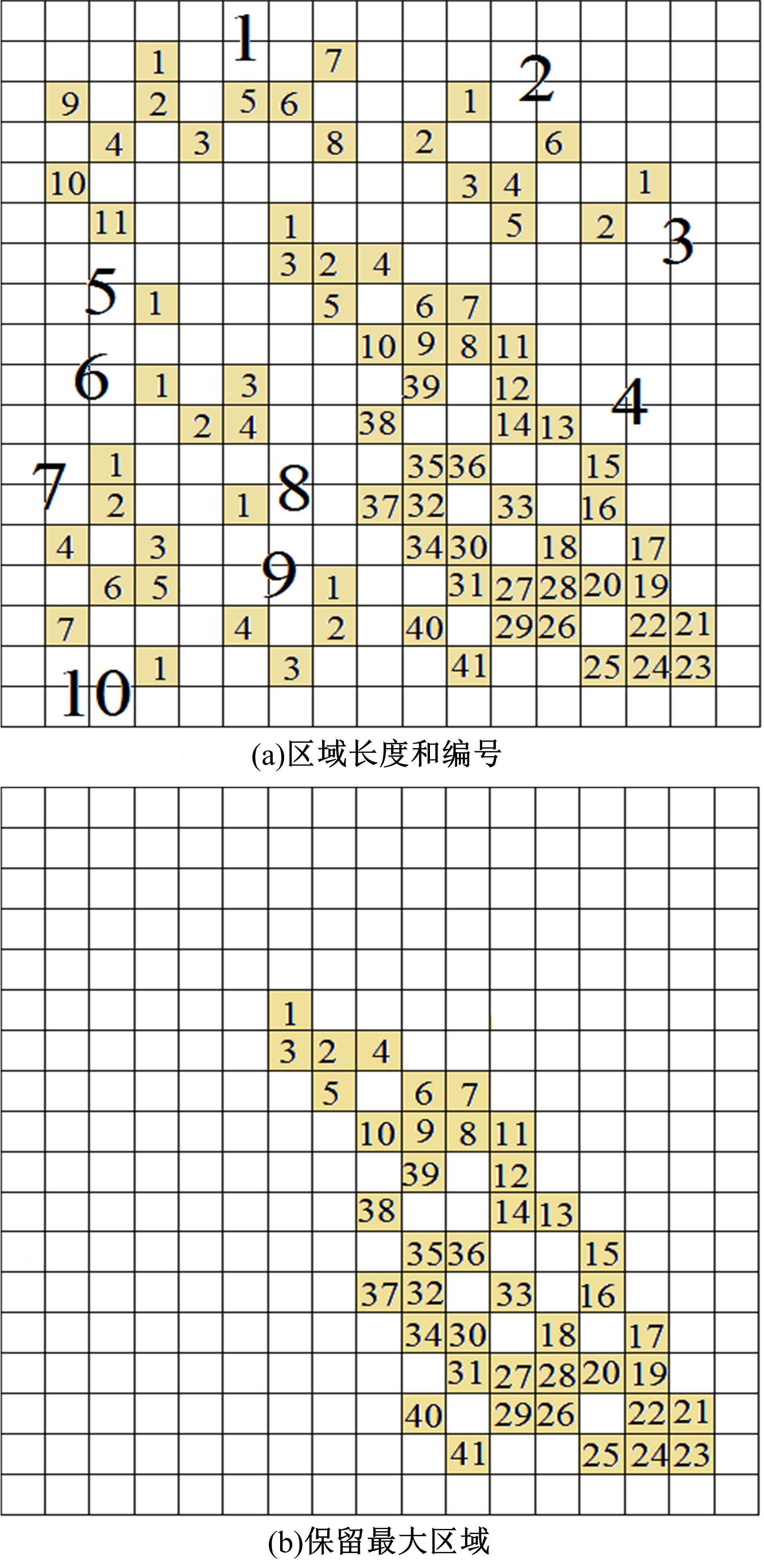
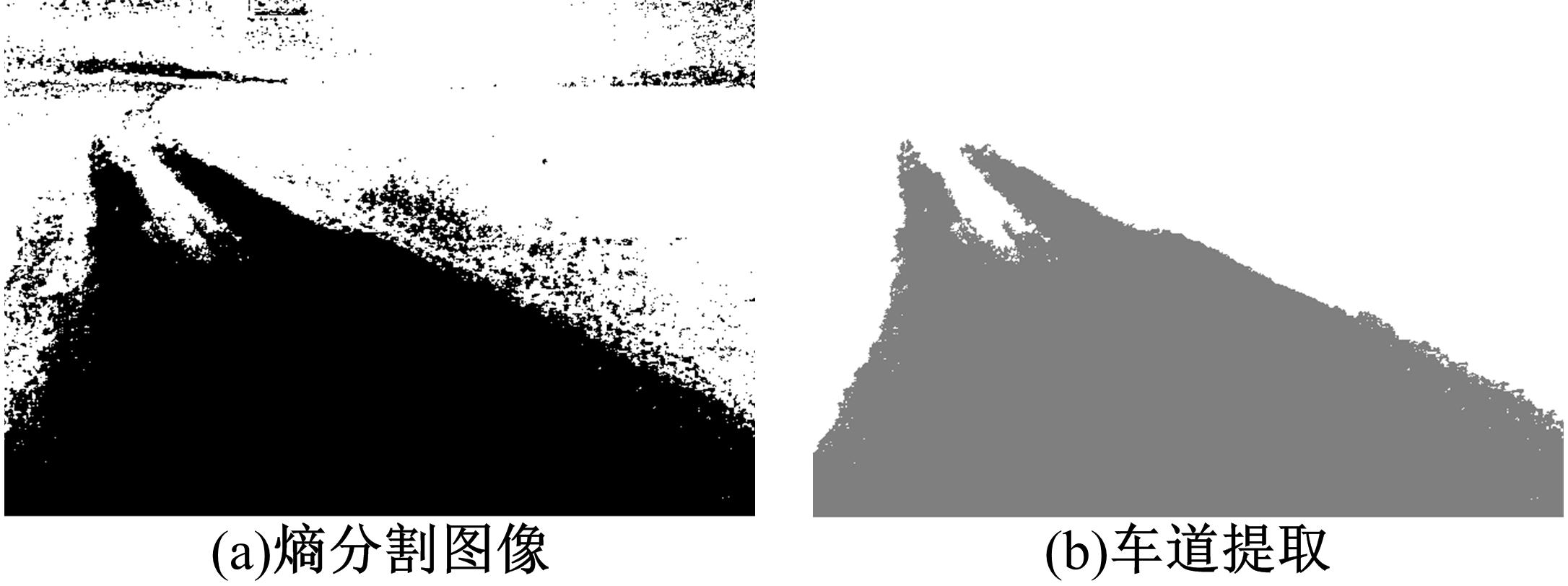
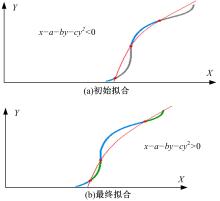
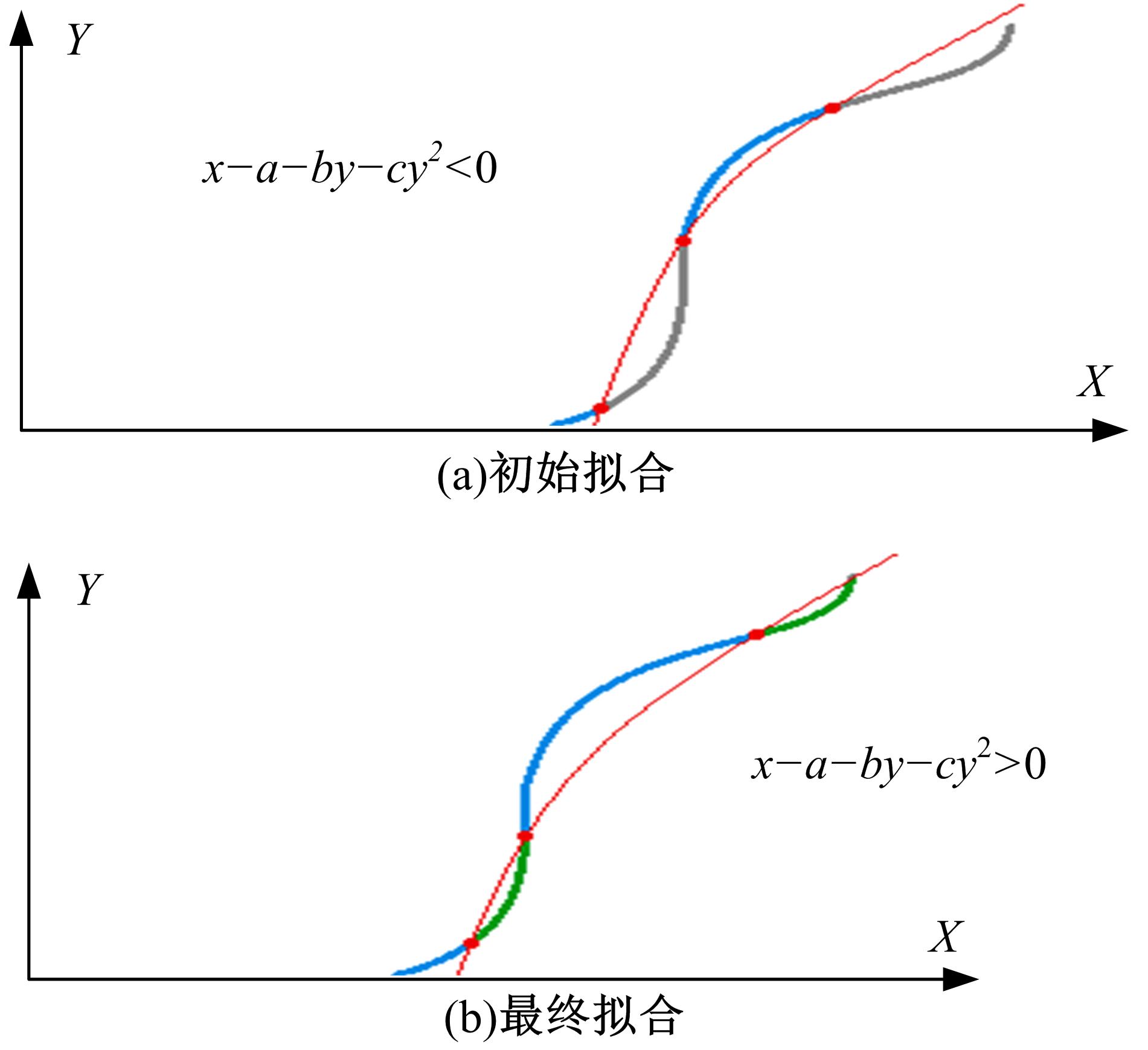
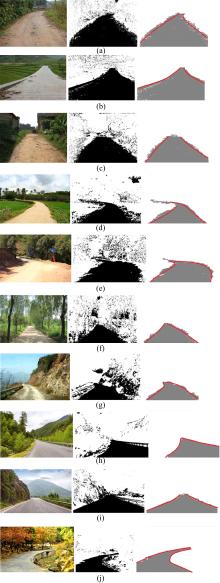
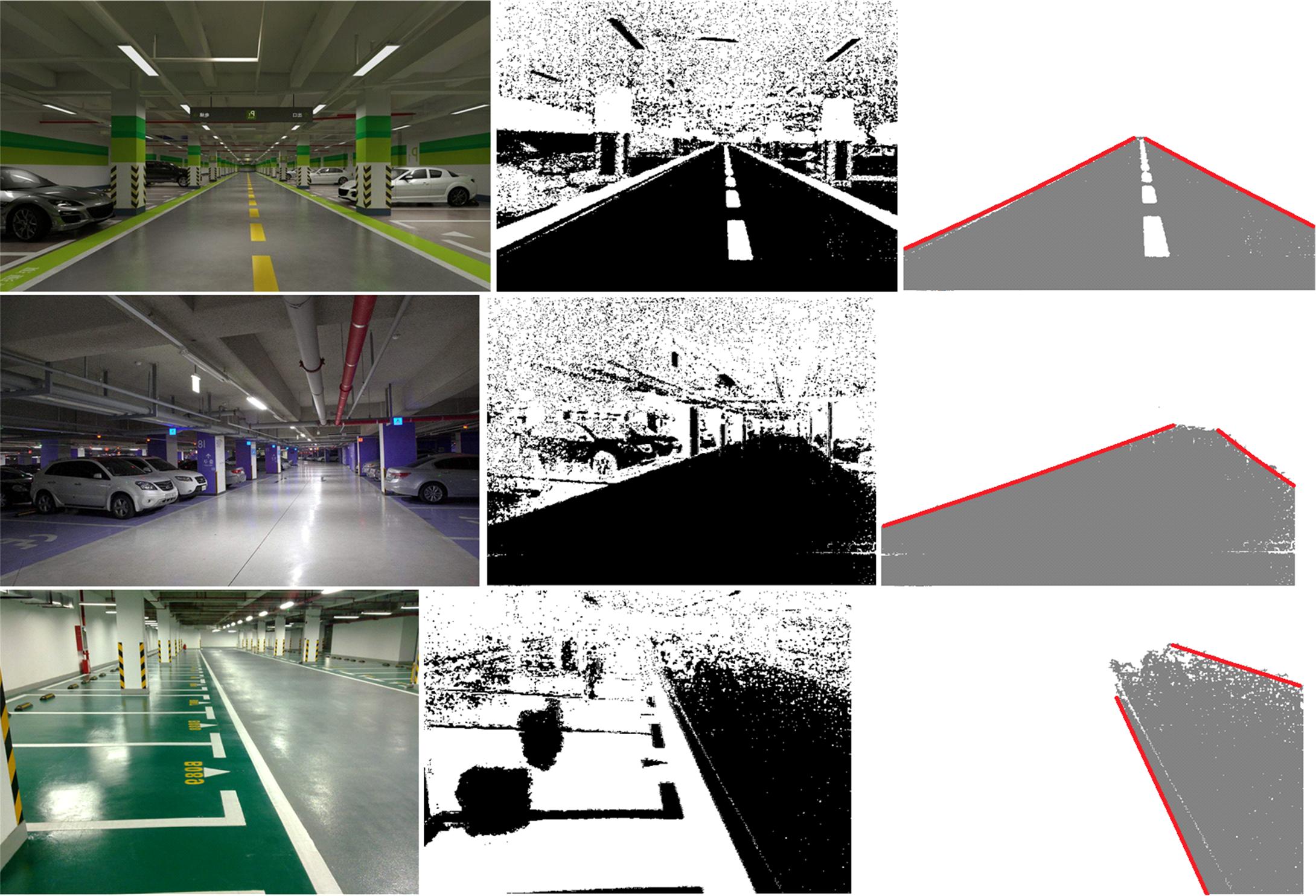
非结构化道路通常没有车道线等引导标线,且边界模糊,周围干扰因素较多,在这种道路上自动驾驶以及车辆辅助驾驶的车道保持功能将不能可靠工作。通过生成道路RGB图像的熵图像,并计算此熵图像直方图的最小差值,以此差值作为阈值初步分割道路图像并使用改进区域生长方法提取出道路区域。使用实时性较好的二次曲线建立车道模型,并使用改进的最小二乘拟合方法可有效避开道路区域边缘杂点并提高边缘拟合速度。试验结果表明,改进的方法可以快速并较好地提取出非结构化道路图像中的车道并拟合出车道线,有利于实现基于视觉的自动驾驶和车辆辅助驾驶系统在非结构化道路上的车道保持。
中图分类号:
- U495




| 1 | 熊思, 李磊民, 黄玉清. 基于小波变换和K⁃means的非结构化道路检测[J]. 计算机工程, 2014, 40(2): 158⁃161. |
| XiongSi, LiLei⁃min, HuangYu⁃qing. Unstructured road detection based on wavelet transform and K⁃means[J]. Computer Engineering, 2014, 40(2): 158⁃161. | |
| 2 | 郭秋梅, 黄玉清. 基于二维熵和轮廓特征的非结构化道路检测[J]. 计算机应用, 2013, 33(7): 2005⁃2008. |
| GuoQiu⁃mei, HuangYu⁃qing. Unstructured road detection based on two⁃dimensional entropy and contour features[J]. Journal of Computer Applications, 2013, 33(7): 2005⁃2008. | |
| 3 | WangY, TeohE K, ShenD G. Lane detection and tracking using B⁃Snake[J]. Image and Vision Computing, 2004, 22(4): 269⁃280. |
| 4 | JeongH, OhY, ParkJ H, et al. Vision⁃based adaptive and recursive tracking of unpaved roads[J]. Pattern Recognition Letters, 2002, 23(1⁃3): 73⁃82. |
| 5 | 周植宇, 杨明, 薛林继, 等. 一种基于高斯核支持向量机的非结构化道路环境植被检测方法[J]. 机器人, 2015, 37(6): 702⁃707. |
| ZhouZhi⁃yu, YangMing, XueLin⁃ji, et al. Vegetation detection approach based on gaussian kernel support vector machine in unstructured road environment[J]. Robot, 2015, 37(6): 702⁃707. | |
| 6 | 柏猛, 李敏花. 基于图模型的道路检测方法[J]. 模式识别与人工智能, 2014, 27(7): 655⁃662. |
| BaiMeng, LiMin⁃hua. Road detection method based on graph model[J]. Pattern Recognition and Artificial Intelligence, 2014, 27(7): 655⁃662. | |
| 7 | 龚建伟, 叶春兰, 姜岩, 等. 多层感知器自监督在线学习非结构化道路识别[J]. 北京理工大学学报, 2014, 34(3): 261⁃266. |
| GongJian⁃wei, YeChun⁃lan, JiangYan, et al. Unstructured road recognition using self⁃supervised multilayer perceptron online learning algorithm[J]. Transactions of Beijing Institute of Technology, 2014, 34(3): 261⁃266. | |
| 8 | ZhouS Y, GongJ W, XiongG M, et al. Road detection using support vector machine based on online learning and evaluation[C]∥IEEE Intelligent Vehicles Symposium, San Diego, CA, USA, 2010: 256⁃261. |
| 9 | 兰丽, 胡晓辉, 孙苗强. 一种基于灰关联和Sobel算子的完全非结构化道路边缘检测方法[J]. 湖南工程学院学报, 2013, 23(1): 42⁃44. |
| LanLi, HuXiao⁃hui, SunMiao⁃qiang. Completely unstructured road edge detection based on grey relation and sobel operator[J]. Journal of Hunan Institute of Engineering, 2013, 23(1): 42⁃44. | |
| 10 | 吕艳鹏, 潘玉田. 基于MATLAB图像处理的非结构化道路识别[J]. 机械工程与自动化, 2014, 43(2): 32⁃33. |
| LvYan⁃peng, PanYu⁃tian. Unstructured road detection based on MATLAB image processing[J]. Mechanical Engineering & Automation, 2014, 43(2): 32⁃33. | |
| 11 | 李进, 陈杰平, 易克传, 等. 基于特征融合的视觉导航智能车辆的车道识别[J]. 汽车工程, 2015, 37(5): 587⁃592. |
| LiJin, ChenJie⁃ping, YiKe⁃chuan, et al. Lane identification of vision⁃guided intelligent vehicle based on feature fusion[J]. Automotive Engineering, 2015, 37(5): 587⁃592. | |
| 12 | 许华荣, 王晓栋, 方遒. 基于B样条曲线模型的结构化道路检测算法[J]. 自动化学报, 2011, 37(3): 270⁃275. |
| XuHua⁃rong, WangXiao⁃dong, FangQiu. Structure road detection algorithm based on B⁃spline curve model[J]. Acta Automatica Sinica, 2011, 37(3): 270⁃275. | |
| 13 | ChiuK Y, LinS F. Lane detection using color⁃based segmentation[C]∥IEEE Intelligent Vehicles Symposium, Las Vegas, USA, 2005: 706⁃711. |
| 14 | 颜飞,周长久,田彦涛. 用于目标定位的图像边缘点检测算法[J]. 吉林大学学报:工学版,2016,46(6):2103-2110. |
| Yanfei,zhouchang-jiu,tianyan-tao. Image edge points detection algorithm for object localization[J]. Journal of Jilin University(Engineering and Technology Edition), 2016,46(6):2103-2110. | |
| 15 | 肖明尧,李雄飞,张小利,等. 基于多尺度的区域生长的图像分割算法[J]. 吉林大学学报:工学版,2017,47(5):1591-1597. |
| XiaoMing-yao,LiXiong-fei,ZhangXiao-li,et al. Medical image segmentation algorithm based on multi-scale region growing[J]. Journal of Jilin University(Engineering and Technology Edition), 2017,47(5):1591-1597. | |
| 16 | 武历颖, 余强. 一种快速准确非结构化道路检测方法研究[J]. 计算机仿真, 2016, 33(9): 174⁃178. |
| WuLi⁃ying, YuQiang. A fast and accurate detection method of unstructured road[J]. Computer Simulation, 2016, 33(9): 174⁃178. |
| [1] | 陶涛,徐洪泽. 高速列车浸入与不变自适应容错控制方法[J]. 吉林大学学报(工学版), 2015, 45(2): 554-561. |
| [2] | 陈 强, 李 江, 吴 想, 闫松申. 轮胎印痕识别算法及实例分析[J]. 吉林大学学报(工学版), 2005, 35(01): 39-0043. |
|