吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (4): 1246-1257.doi: 10.13229/j.cnki.jdxbgxb20180180
• • 上一篇
基于新月鱼尾推进理论的多连杆鱼骨仿生设计
陈东良1( ),臧睿1,段鹏1,赵伟鹏1,翁旭涛1,孙杨1,唐艺鹏2
),臧睿1,段鹏1,赵伟鹏1,翁旭涛1,孙杨1,唐艺鹏2
- 1. 哈尔滨工程大学 机电工程学院, 哈尔滨 150001
2. 浙江大学 机械工程学院, 杭州 310027
Biomimetic design of multi⁃link fishbone based on crescent′s fishtail propulsion theory
Dong⁃liang CHEN1(),Rui ZANG1,Peng DUAN1,Wei⁃peng ZHAO1,Xu⁃tao WENG1,Yang SUN1,Yi⁃peng TANG2
- 1. College of Mechanical and Electrical Engineering, Harbin Engineering University,Harbin 150001, China
2. College of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China
摘要:
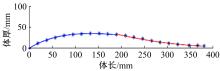
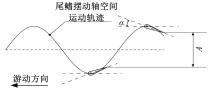
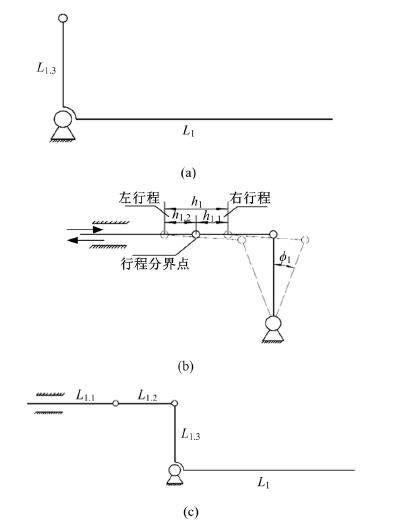
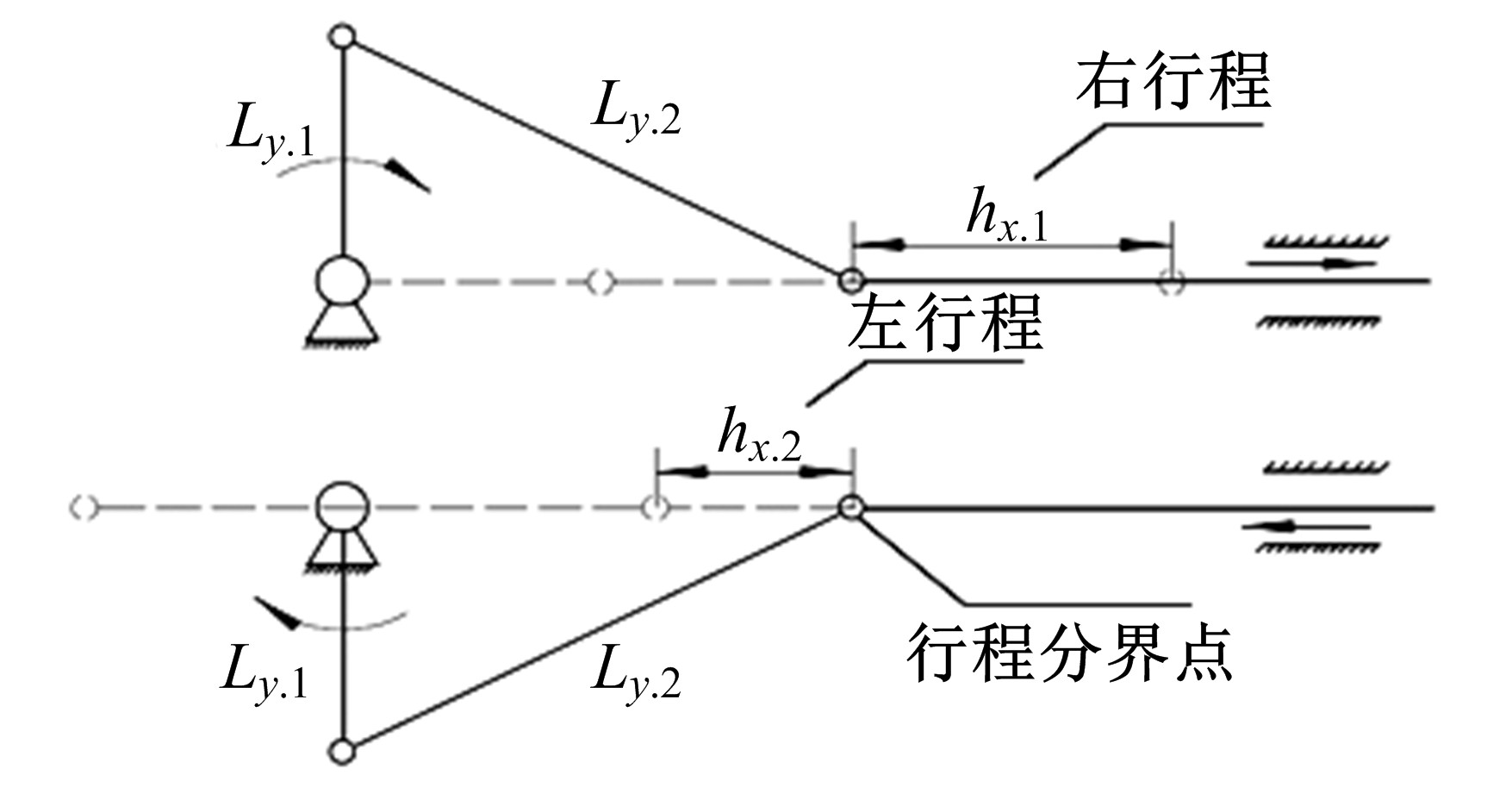
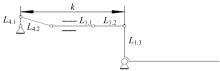
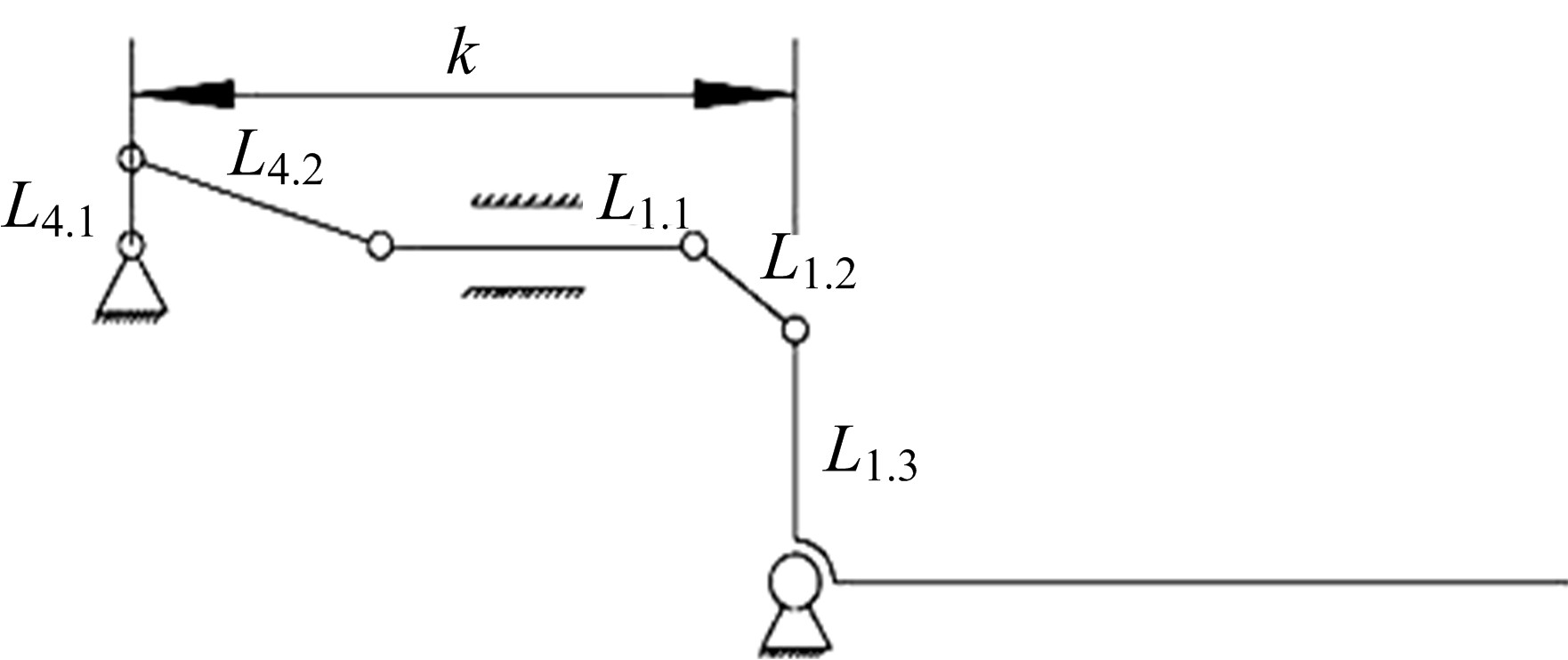
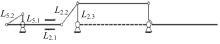
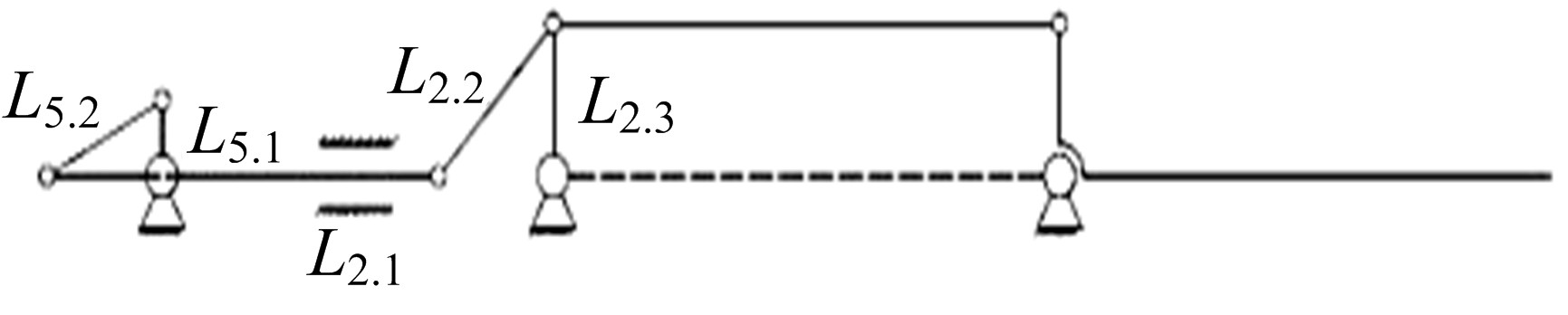
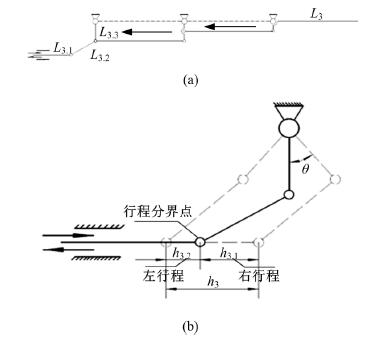
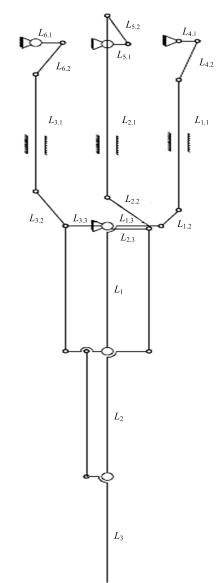
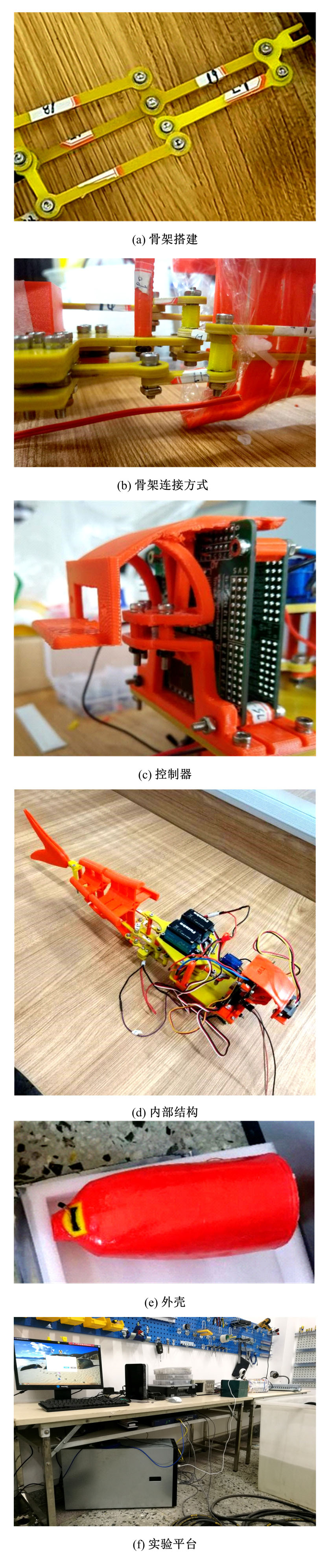
基于新月鱼尾推进相关理论,设计了一种新型的符合身体/尾鳍推进模式的仿生多连杆鱼骨。通过对新月鱼尾推进相关理论的分析,确定了影响鱼体推进的主要设计参数,即躯椎摆角、尾椎摆角及尾鳍摆角。以金枪鱼中体型较小的鲣鱼作为仿生原型,通过逆向工程技术,对其体厚方向轮廓进行曲线拟合并得到其拟合函数。将拟合函数作为鱼骨结构设计边界条件,结合设计参数,通过逆运动学原理设计了躯椎、尾椎、尾鳍、躯椎驱动、尾椎驱动、尾鳍驱动6部分连杆系统。利用仿真软件ADAMS对该机构可行性进行仿真试验,并进行了实物样机试验。试验结果表明:该多连杆鱼骨结构可以实现仿生鱼推进。
中图分类号:
- TB17





























| 1 | 曾妮, 杭观荣, 曹国辉, 等 . 仿生水下机器人研究现状及其发展趋势[J]. 机械工程师, 2006(4): 18⁃21. |
| Zeng Ni , Hang Guan⁃rong , Cao Guo⁃hui , et al . Present state and tendency of bionic underwater robot[J]. Mechanical Engineer, 2006(4): 18⁃21. | |
| 2 | 刘芳芳 . 基于柔性鳍波动的水下仿生系统推进性能研究[D]. 杭州: 浙江大学机械工程学院, 2012. |
| Liu fang⁃fang . Research on propulsion performances of flexible undulating fin based biomimetic system[D]. Hangzhou: School of Mechanical Engineering, Zhejiang University, 2012. | |
| 3 | Sfakiotakis M , Lane D M , Davies J B C . Review of fish swimming modes for aquatic locomotion[J]. IEEE Journal of Oceanic Engineering, 1999, 24(2): 237⁃252. |
| 4 | Triantafyllou G S , Triantafyllou M S , Grosenbaugh M A . Optimal thrust development in oscillating foils with application to fish propulsion[J]. Fluids Struct, 1993, 7(2): 205⁃224. |
| 5 | Triantafyllou G S , Triantafyllou M S . An efficient swimming machine[J]. Scientific American, 1995, 272(3): 64⁃70. |
| 6 | Yao⁃Tsu T W . Swimming of a waving plate[J]. Journal of Fluid Mechanics, 1961, 10(3): 321⁃344. |
| 7 | Chopra M G . Hydromechanics of lunate⁃tail swimming propulsion:part2[J]. Journal of Fluid Mechanics, 1974, 64(2): 375⁃392. |
| 8 | Chopra M G . Hydromechanics of lunate⁃tail swimming propulsion:part2[J]. Journal of Fluid Mechanics, 1977, 79(1): 49⁃69. |
| 9 | Lan C E . The unsteady quasi⁃vortex⁃lattice method with applications to animal propulsion[J]. Journal of Fluid Mechanics, 1979, 93(4): 747⁃765. |
| 10 | 陈东辉, 刘伟, 吕建华, 等 . 基于虾夷扇贝体表结构的玉米茬根捡拾器仿生设计[J]. 吉林大学学报:工学版, 2017, 47(4): 1185⁃1193. |
| Chen dong⁃hui , Liu wei , jian⁃hua Lyu , et al . Bionic design of corn stucture collector based on surface structure of Patinopecten yessoensis [J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(4): 1185⁃ 1193. | |
| 11 | 郑文伟, 吴克坚 . 机械原理[M]. 北京: 高等教育出版社, 2012. |
| [1] | 刘坤,吉硕,孙震源,徐洪伟,刘勇,赵静霞. 多功能坐站辅助型如厕轮椅机械结构设计与优化[J]. 吉林大学学报(工学版), 2019, 49(3): 872-880. |
| [2] | 吴娜,庄健,张克松,王慧鑫,马云海. 毛蚶贝壳曲面承压力学特性及断裂机理[J]. 吉林大学学报(工学版), 2019, 49(3): 897-902. |
| [3] | 熙鹏,丛茜,王庆波,郭华曦. 仿生条纹形磨辊磨损试验及耐磨机理分析[J]. 吉林大学学报(工学版), 2018, 48(6): 1787-1792. |
| [4] | 郭昊添,徐涛,梁逍,于征磊,刘欢,马龙. 仿鲨鳃扰流结构的过渡段换热表面优化设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1793-1798. |
| [5] | 栾鑫, 邓卫, 程琳, 陈新元. 特大城市居民出行方式选择行为的混合Logit模型[J]. 吉林大学学报(工学版), 2018, 48(4): 1029-1036. |
| [6] | 田为军, 王骥月, 李明, 张兴旺, 张勇, 丛茜. 面向水上机器人的水黾运动观测[J]. 吉林大学学报(工学版), 2018, 48(3): 812-820. |
| [7] | 钱志辉, 周亮, 任雷, 任露泉. 具有仿生距下关节和跖趾关节的完全被动步行机[J]. 吉林大学学报(工学版), 2018, 48(1): 205-211. |
| [8] | 田丽梅, 王养俊, 李子源, 商延赓. 仿生功能表面内流减阻测试系统的研制[J]. 吉林大学学报(工学版), 2017, 47(4): 1179-1184. |
| [9] | 陈东辉, 刘伟, 吕建华, 常志勇, 吴婷, 慕海锋. 基于虾夷扇贝体表结构的玉米茬根捡拾器仿生设计[J]. 吉林大学学报(工学版), 2017, 47(4): 1185-1193. |
| [10] | 王颖, 李建桥, 张广权, 黄晗, 邹猛. 基于多种介质的仿生步行足力学特性[J]. 吉林大学学报(工学版), 2017, 47(2): 546-551. |
| [11] | 葛长江, 叶辉, 胡兴军, 于征磊. 鸮翼后缘噪声的预测及控制[J]. 吉林大学学报(工学版), 2016, 46(6): 1981-1986. |
| [12] | 刘坤, 叶明, 李超, 闫鹏飞, 刘晋侨. 臂式站起运动康复训练机械结构设计及分析[J]. 吉林大学学报(工学版), 2016, 46(5): 1532-1539. |
| [13] | 李梦, 苏义脑, 孙友宏, 高科. 高胎体仿生异型齿孕镶金刚石钻头[J]. 吉林大学学报(工学版), 2016, 46(5): 1540-1545. |
| [14] | 梁云虹, 任露泉. 自然生境及其仿生学初探[J]. 吉林大学学报(工学版), 2016, 46(5): 1746-1756. |
| [15] | 梁云虹, 任露泉. 人类生活及其仿生学初探[J]. 吉林大学学报(工学版), 2016, 46(4): 1373-1384. |
|
||