吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (5): 1428-1440.doi: 10.13229/j.cnki.jdxbgxb20181089
• • 上一篇
基于区域采样随机树的客车局部路径规划算法
韩小健1( ),赵伟强1(),陈立军2,郑宏宇1,刘阳1,宗长富1
),赵伟强1(),陈立军2,郑宏宇1,刘阳1,宗长富1
- 1. 吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2. 吉林大学 大数据和网络管理中心,长春 130022
Local path planning of bus based on RS-RRT algorithm
Xiao-jian HAN1(),Wei-qiang ZHAO1(),Li-jun CHEN2,Hong-yu ZHENG1,Yang LIU1,Chang-fu ZONG1
- 1. State Key Laboratory of Automobile Simulation and Control, Jilin University, Changchun 130022, China
2. Big Data and Network Management Center, Jilin University, Changchun 130022, China
摘要:
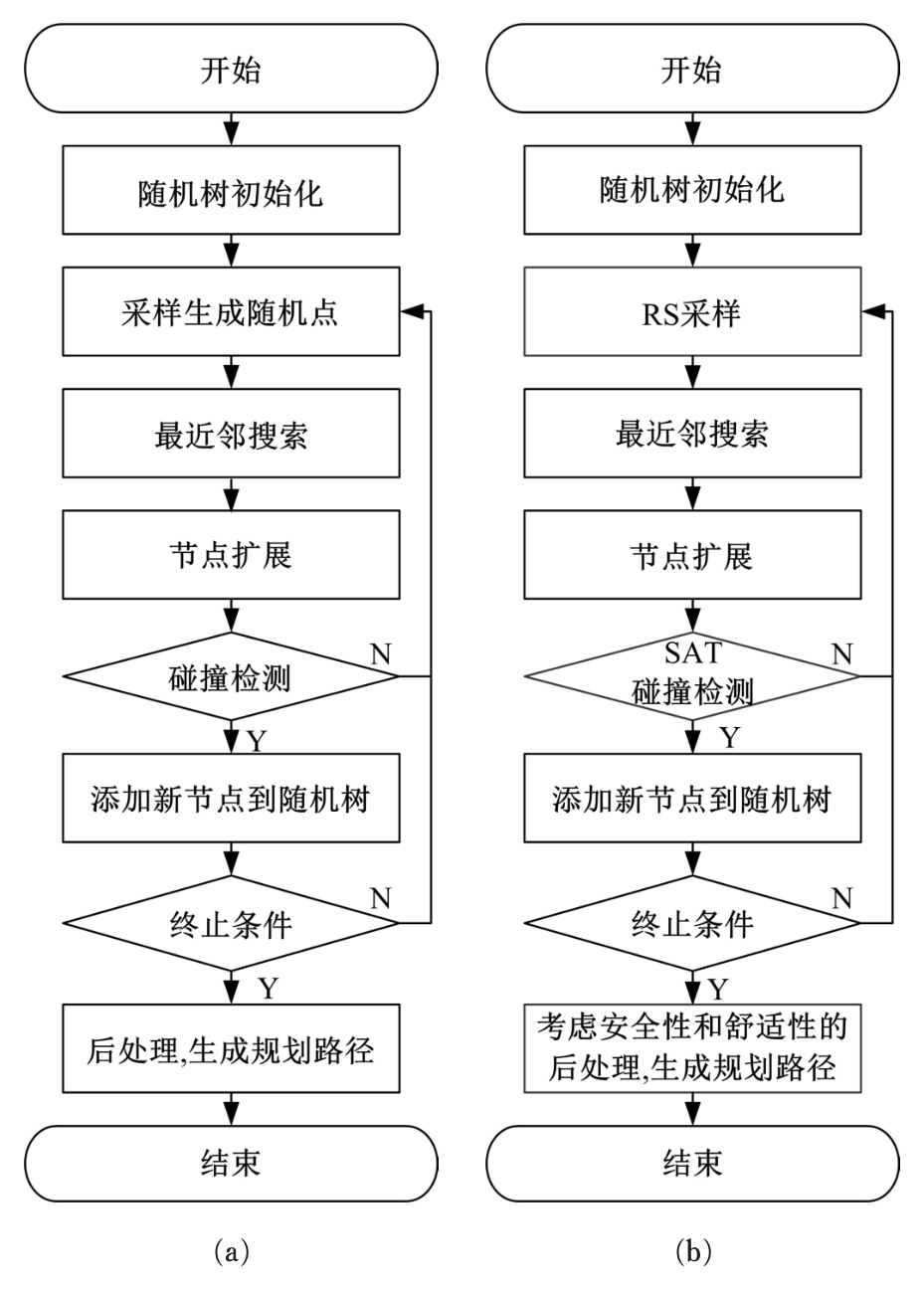
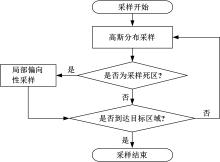
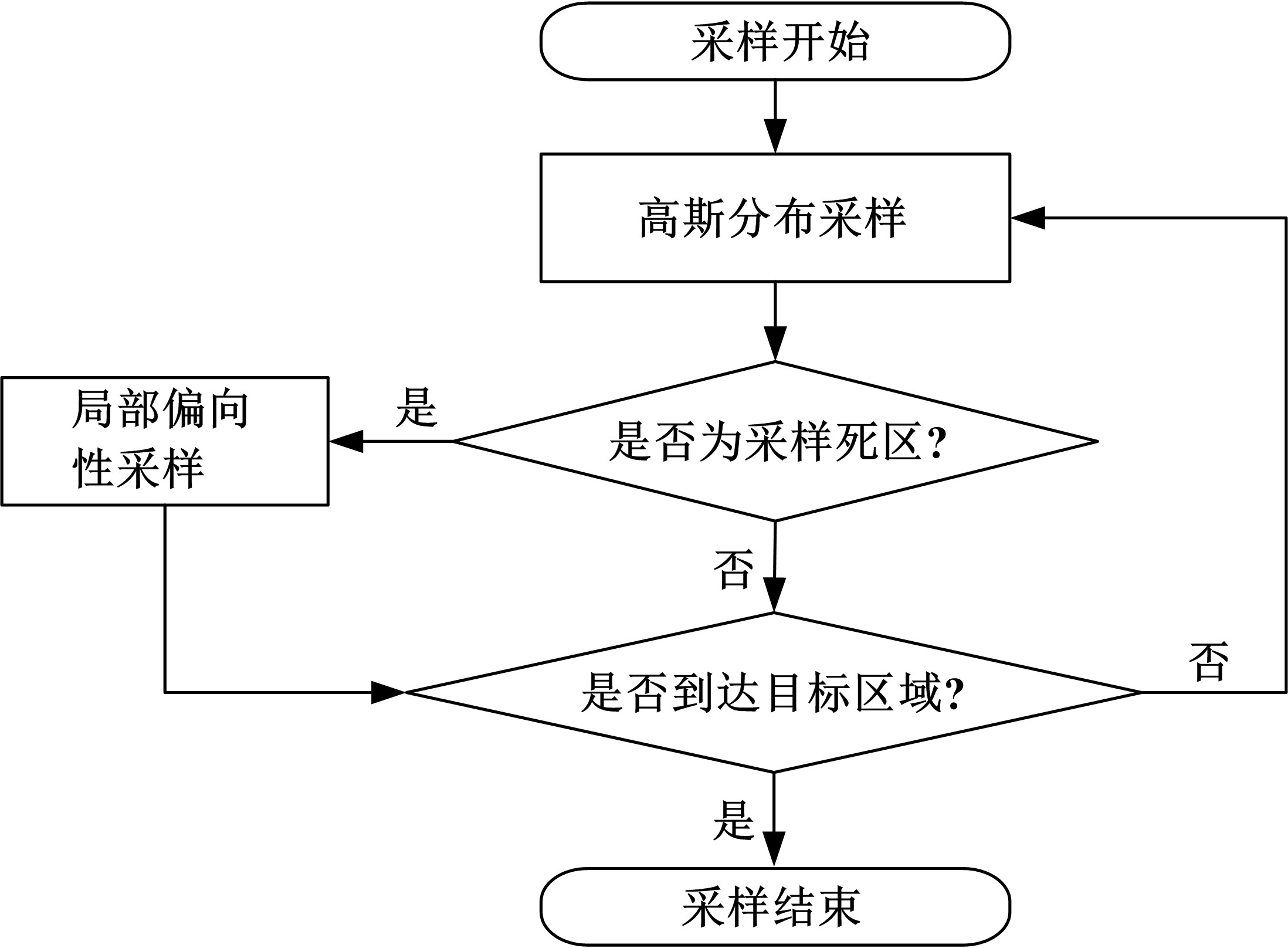
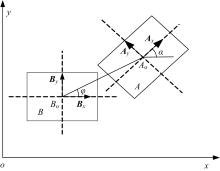
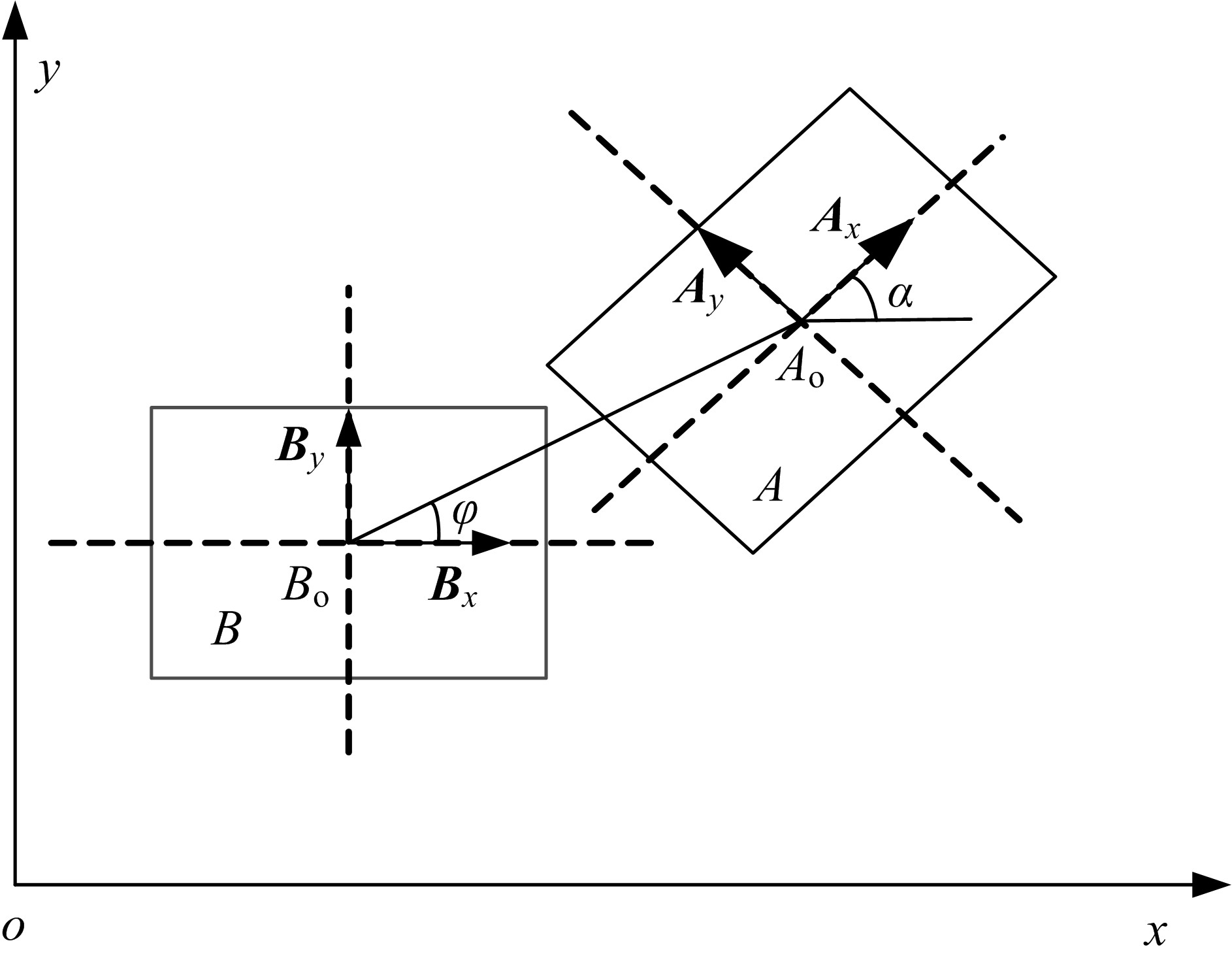
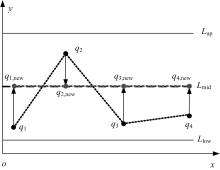
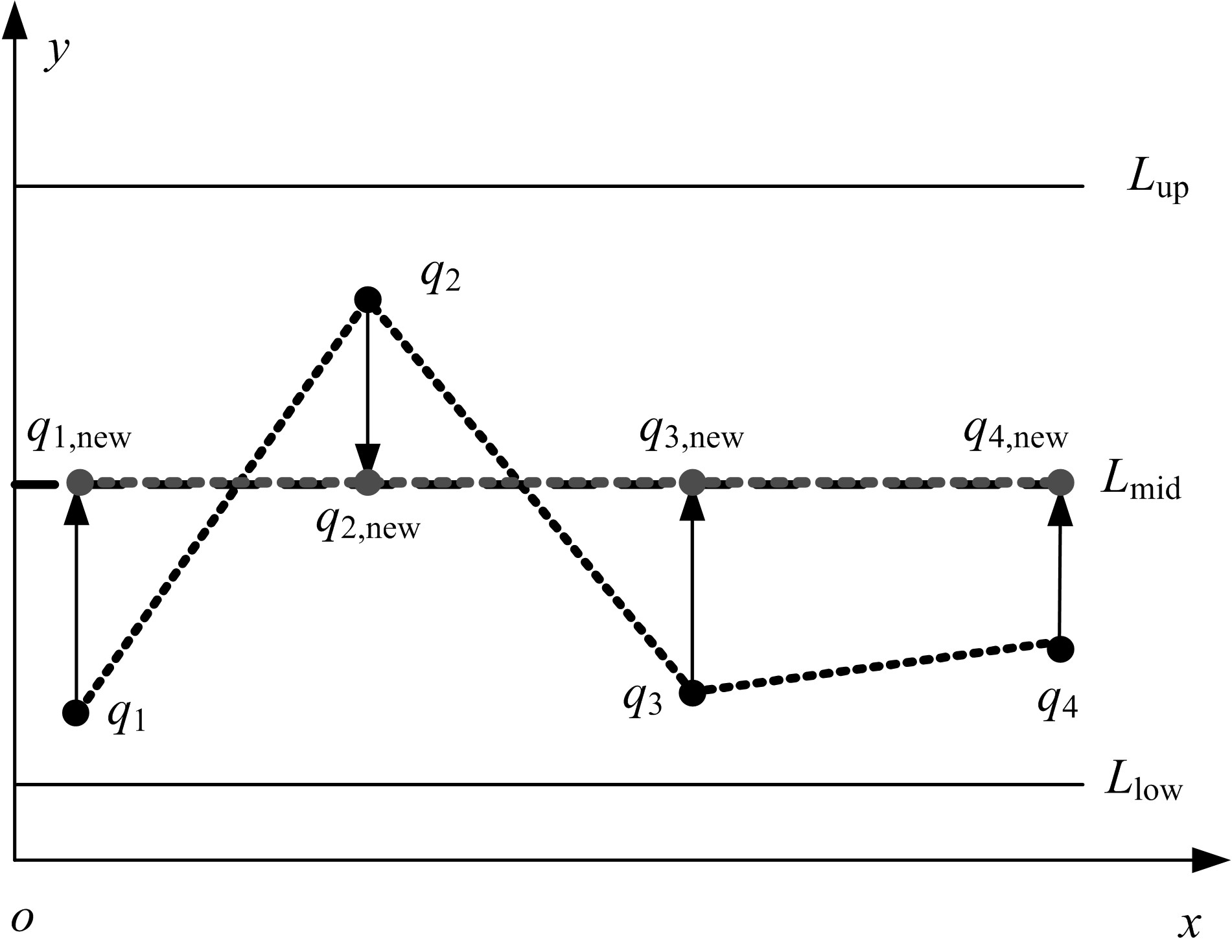
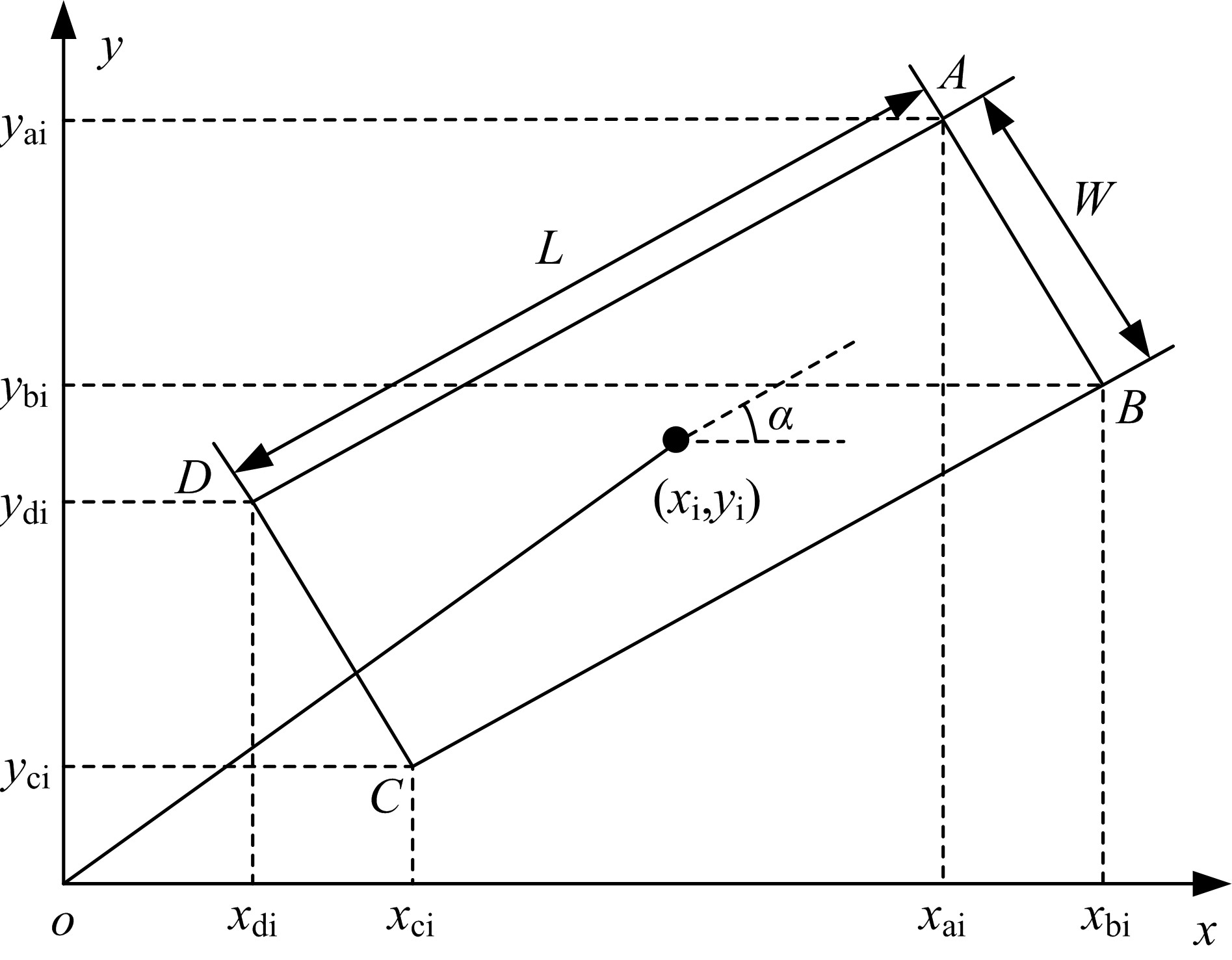
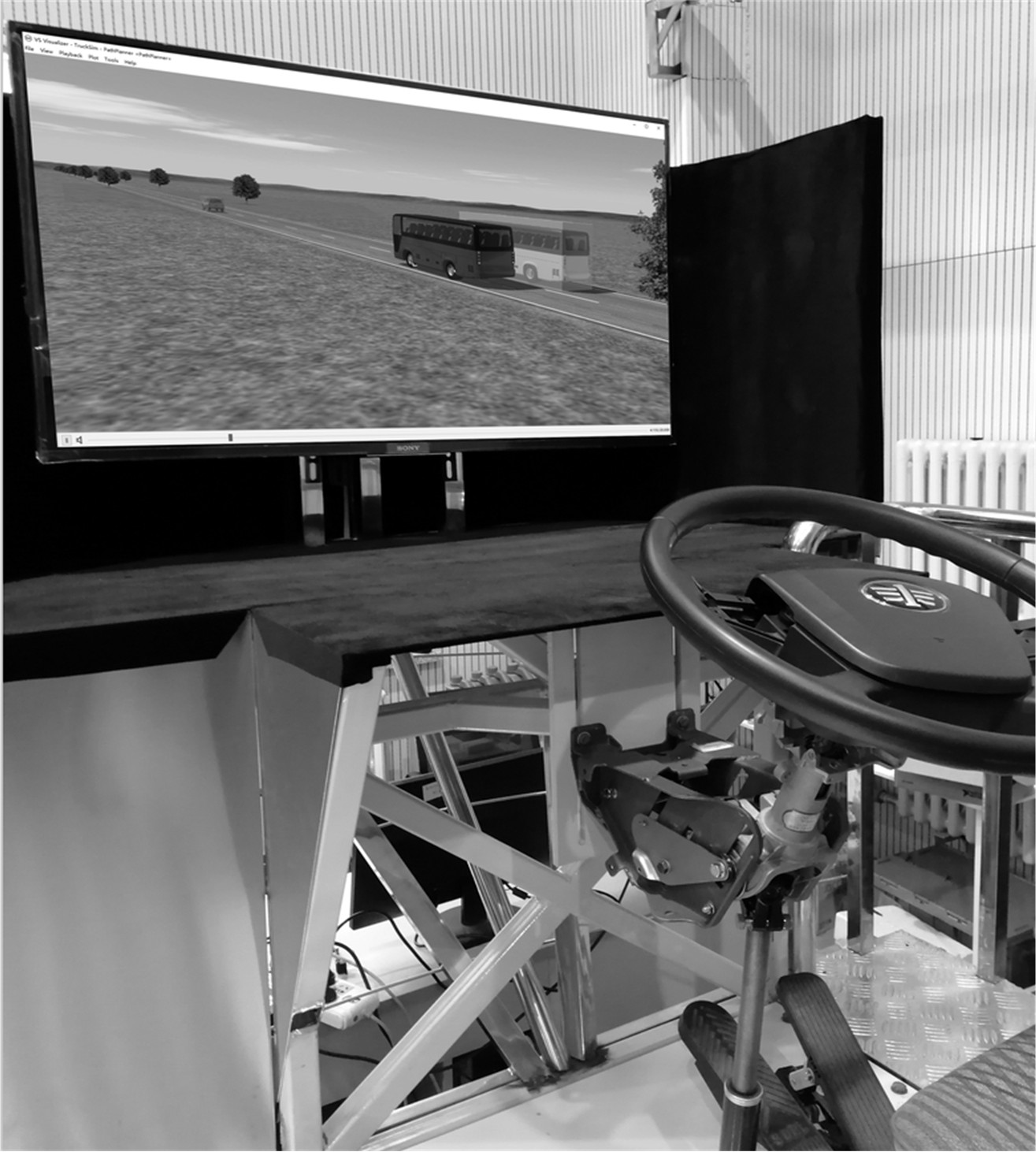
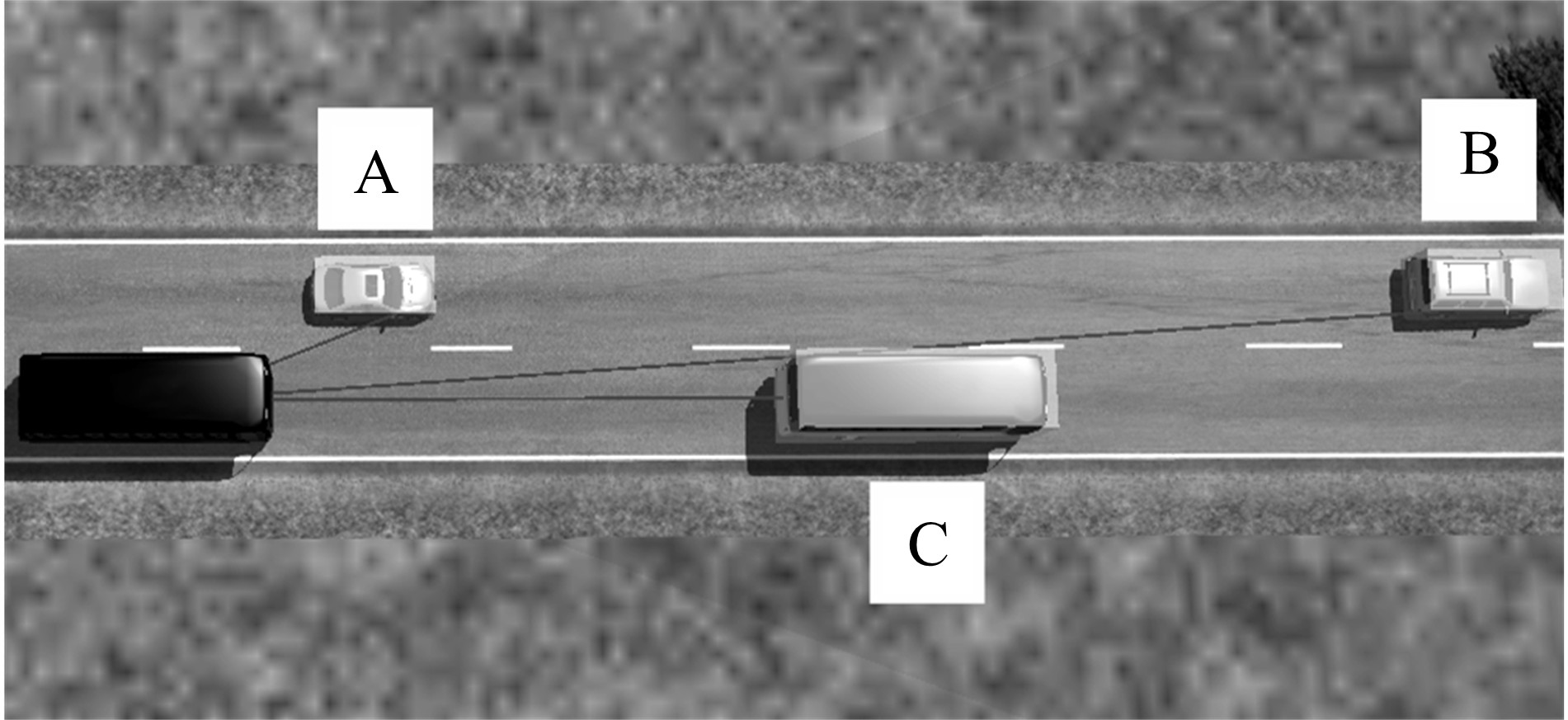
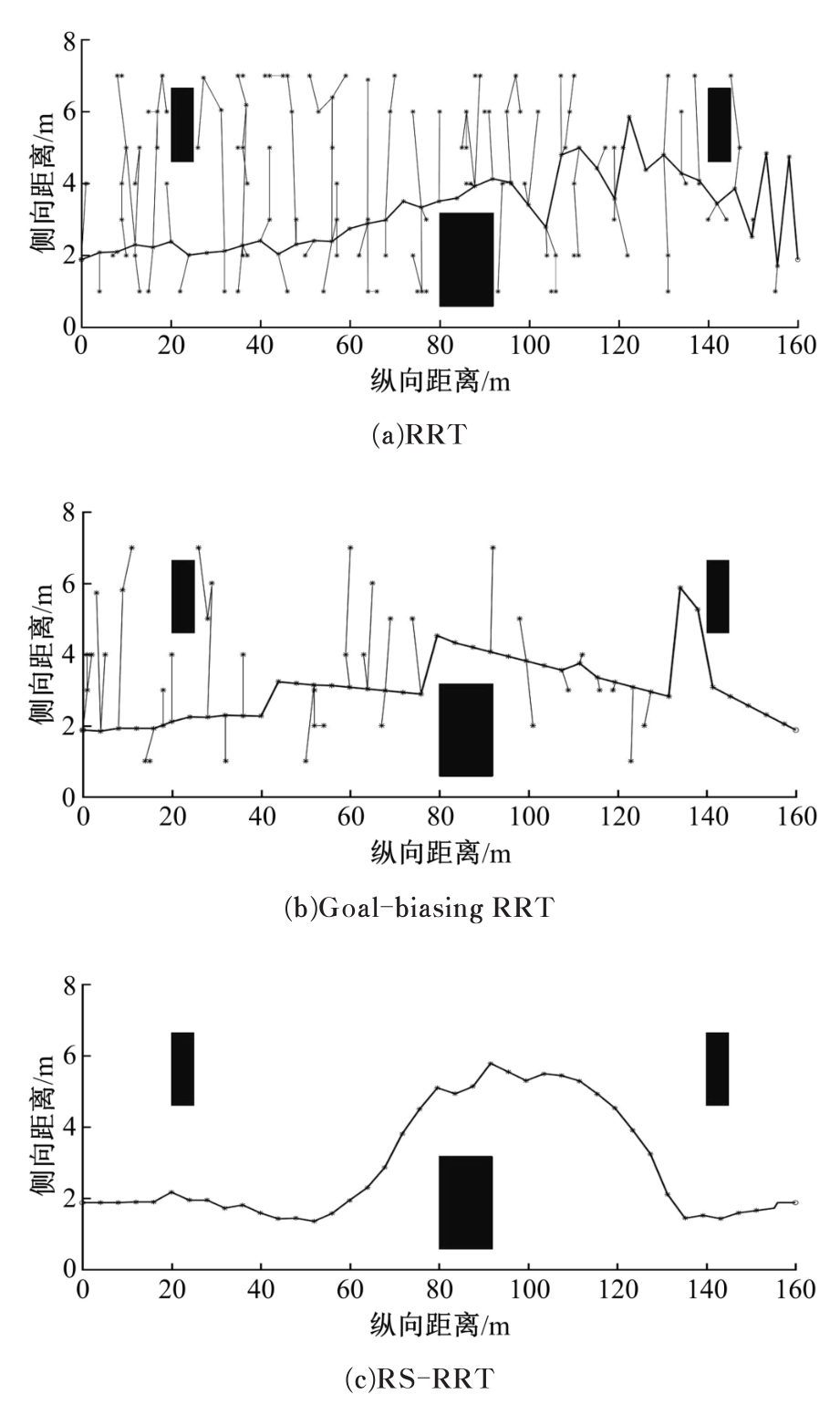
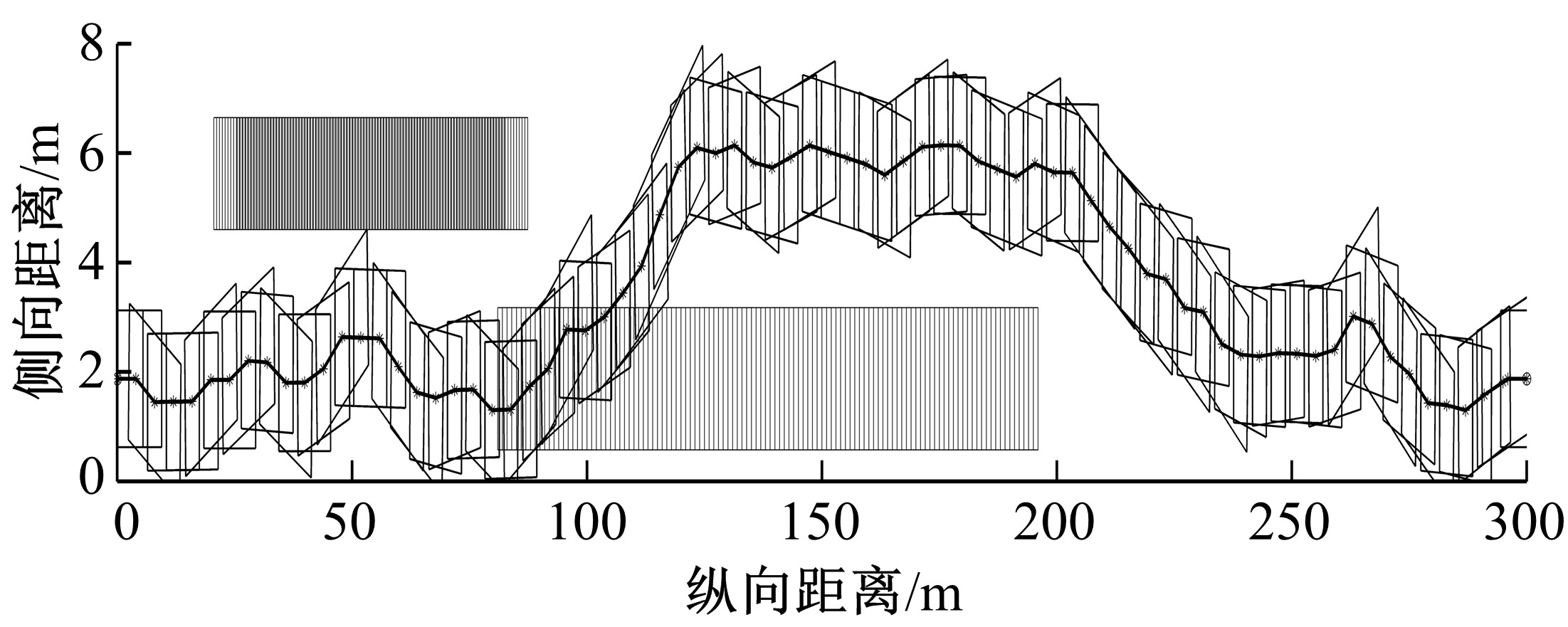
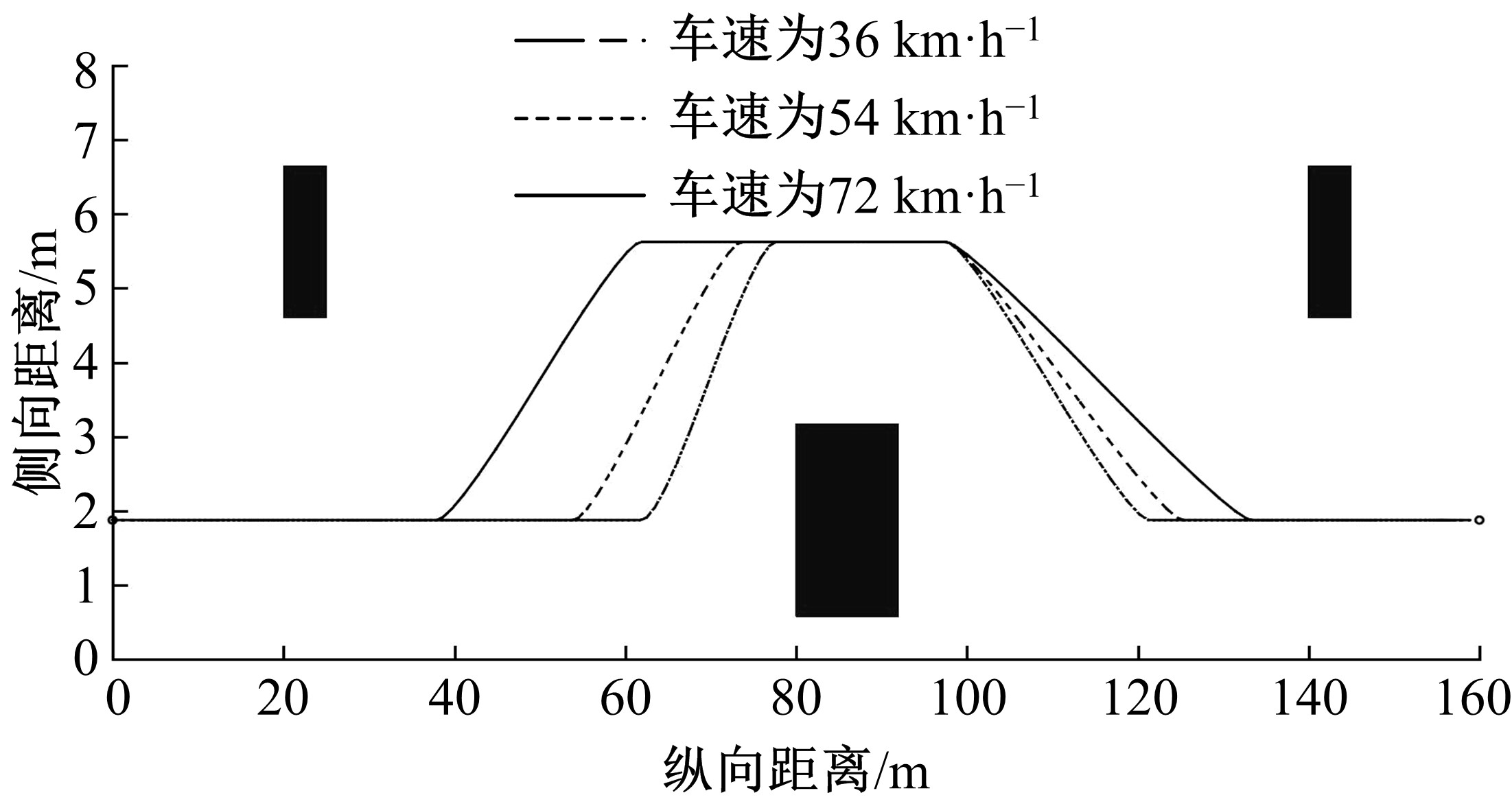
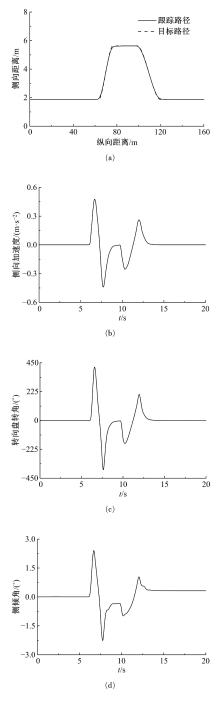
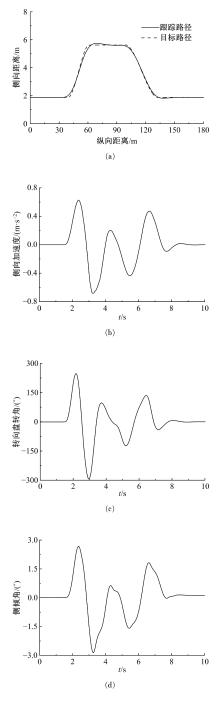
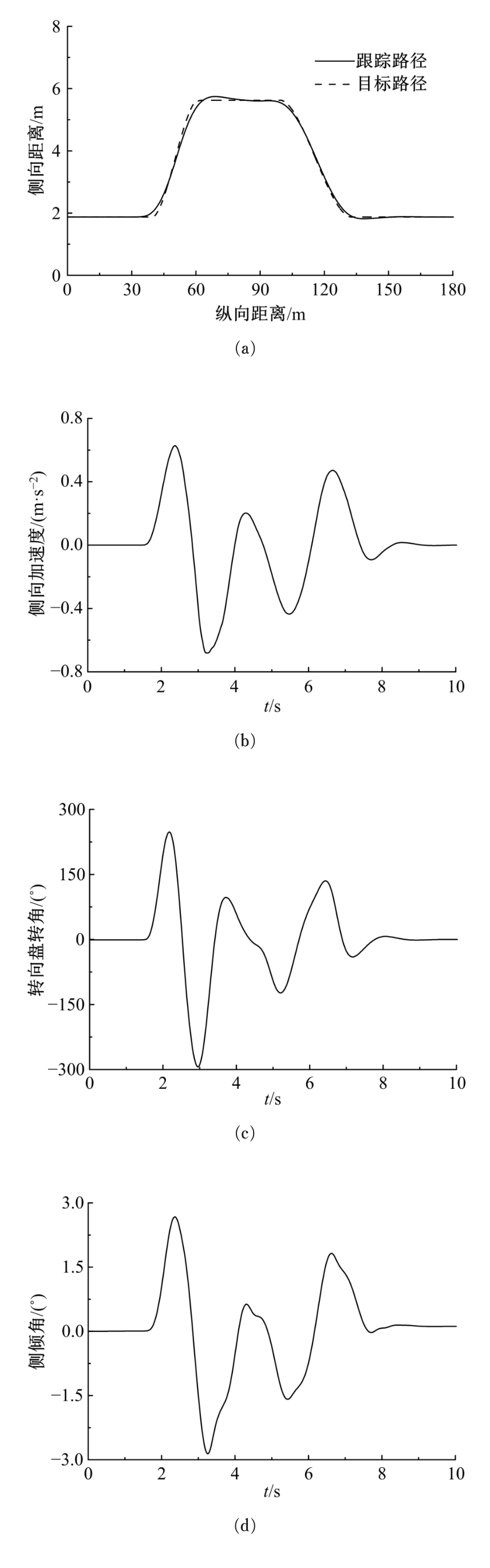
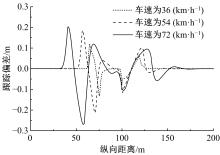
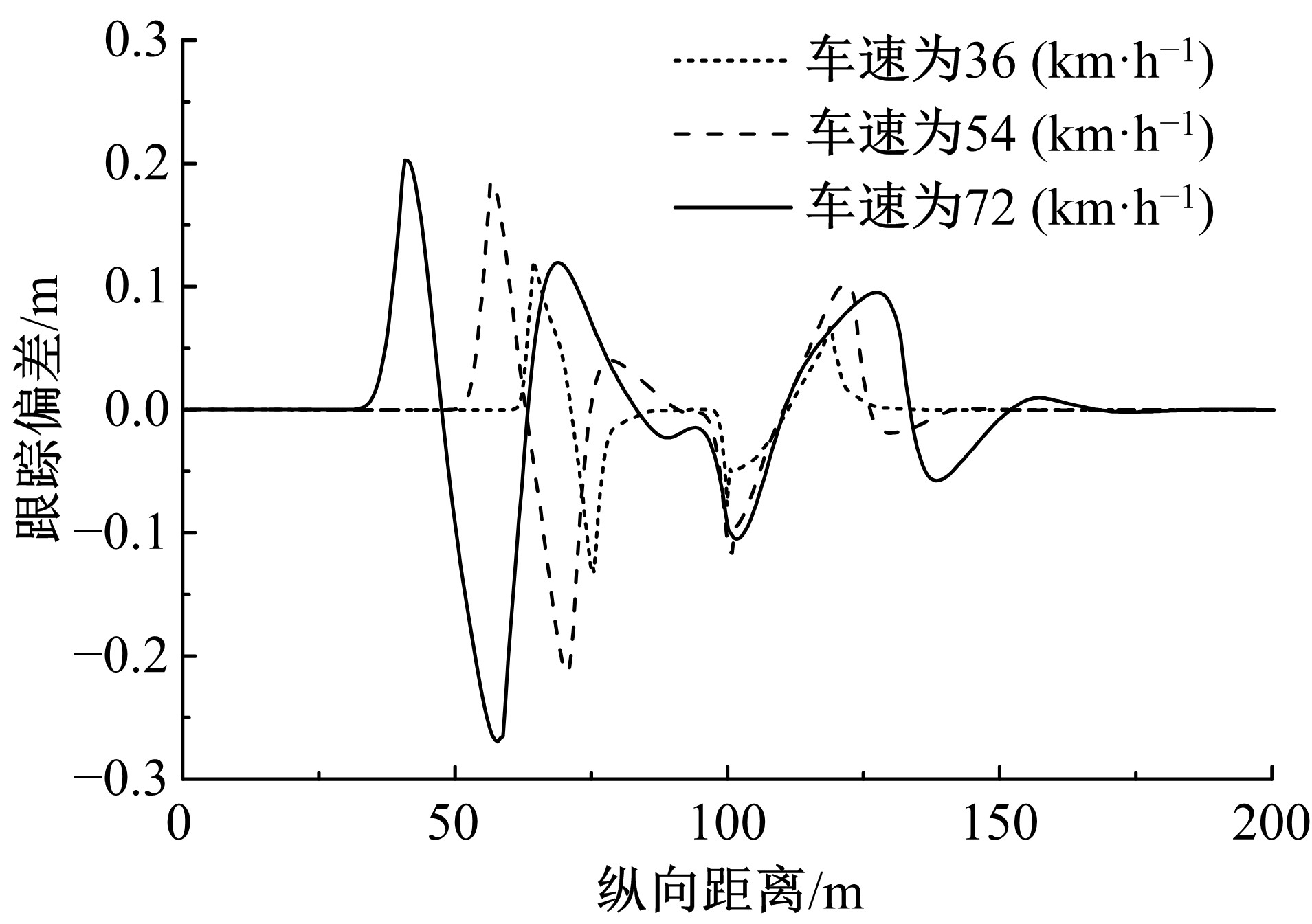
为解决结构化道路环境下自动驾驶客车的路径规划问题,针对双车道避障工况提出了一种区域采样随机树RS-RRT算法。在采样阶段,集成高斯分布采样和局部偏向性采样来提高路径规划算法的搜索效率。在随机树扩展阶段,考虑了客车和障碍物的实际尺寸,利用分离轴定律(SAT)实时检测客车和周围障碍物的碰撞风险。在后处理阶段,结合安全性和舒适性的目标,融合了驾驶共识、安全距离模型和路径平滑算法对规划的路径进行修正。为验证RS-RRT算法的有效性,搭建了商用车电液转向系统硬件在环试验台,利用TruckSim构建仿真场景,通过MATLAB和TruckSim的联合仿真实现算法的验证。试验结果表明:与基本RRT和目标偏向性RRT(Goal-biasing RRT)相比,本文算法在节点数量、路径长度和运行时间上均有优势,生成的路径满足客车动力学和路径跟踪要求。
中图分类号:
- U461.1






| 1 | 黄永, 姚文静, 龙科军 . 公路客运车辆侧翻事故特性及防控研究[J]. 公路与汽运, 2013(2): 85-88. |
| Huang Yong , Yao Wen-jing , Long Ke-jun . The characteristic and prevention research on rollover accident of highway passenger vehicles[J]. Highways & Automotive Applications, 2013(2): 85-88. | |
| 2 | Scheuer A , Fraichard T . Continuous-curvature path planning for multiple car-like vehicles[C]∥IEEE-RSJ International Conference on Intelligent Robots and Systems, Grenoble, 1997: 997-1003. |
| 3 | Elbanhawi M , Simic M , Jazar R N . Continuous path smoothing for car-like robots using B-spline curves[J]. Journal of Intelligent & Robotic Systems, 2015, 80(1): 23-56. |
| 4 | Ji J , Khajepour A , Melek W , et al . Path planning and tracking for vehicle collision avoidance based on model predictive control with multi-constraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 5 | Brown M , Funke J , Erlien S , et al . Safe driving envelopes for path tracking in autonomous vehicles[J]. Control Engineering Practice, 2017, 61: 307-316. |
| 6 | 宁江坤 . 自主行驶车辆的避障控制算法研究[D]. 西安: 西安工业大学电子信息工程学院, 2016. |
| Ning Jiang-kun . Research on obstacle avoidance control algorithm for autonomous vehicles[D]. Xi’an: School of Electronic Information Engineering, Xi’an Technological University, 2016. | |
| 7 | 宋晓琳, 潘鲁彬, 曹昊天 . 基于改进智能水滴算法的汽车避障局部路径规划[J]. 汽车工程, 2016, 38(2): 185-191. |
| Song Xiao-lin , Pan Lu-bin , Cao Hao-tian . Local path planning for vehicle obstacle avoidance based on improved intelligent water drops algorithm[J]. Automotive Engineering, 2016, 38(2): 185-191. | |
| 8 | 陈谋, 肖键, 姜长生 . 基于改进蚁群算法的无人机三维航路规划[J]. 吉林大学学报: 工学版, 2008, 38(4): 991-995. |
| Chen Mou , Xiao Jian , Jiang Chang-sheng . Three dimensional path planning of UAV with improved ant algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2008, 38(4): 991-995. | |
| 9 | 康冰, 王曦辉, 刘富 . 基于改进蚁群算法的搜索机器人路径规划[J]. 吉林大学学报: 工学版, 2014, 44(4): 1062-1068. |
| Kang Bing , Wang Xi-hui , Liu Fu . Path planning of searching robot based on improved ant colony algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2014, 44(4): 1062-1068. | |
| 10 | Karaman S , Frazzoli E . Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| 11 | Ha J S , Choi H L , Jeon J H . Iterative methods for efficient sampling-based optimal motion planning of nonlinear systems[J]. International Journal of Applied Mathematics & Computer Science, 2018, 28(1): 155-168. |
| 12 | Laumond J P , Sekhavat S , Lamiraux F . Guidelines in nonholonomic motion planning for mobile robots[J]. Robot Motion Planning & Control, 1998, 229: 1-53. |
| 13 | Kuffner J J , Lavalle S M . RRT-connect: an efficient approach to single-query path planning[C]∥IEEE International Conference on Robotics and Automation, San Francisco, 2002: 995-1001. |
| 14 | Lavalle S M . Motion planning[J]. Robotics & Automation Magazine IEEE, 2011, 18(2): 108-118. |
| 15 | 杜明博, 梅涛, 陈佳佳, 等 . 复杂环境下基于RRT的智能车辆运动规划算法[J]. 机器人, 2015, 37(4): 443-450. |
| Du Ming-Bo , Mei Tao , Chen Jia-jia , et al . RRT-based motion planning algorithm for intelligent vehicle in complex environments[J]. Robot, 2015, 37(4): 443-450. | |
| 16 | 余卓平, 卫烨, 熊璐, 等 . 城市工况下基于改进RRT的无人车运动规划算法[J]. 汽车技术, 2018(8): 10-17. |
| Yu Zhuo-ping , Wei Ye , Xiong Lu , et al . An improved RRT-based motion planning algorithm for autonomous vehicle in urban environment[J].Automobile Technology, 2018(8): 10-17. | |
| 17 | 宋晓琳, 周南, 黄正瑜, 等 . 改进RRT在汽车避障局部路径规划中的应用[J]. 湖南大学学报: 自然科学版, 2017, 44(4): 30-37. |
| Song Xiao-lin , Zhou Nan , Huang Zheng-yu , et al . An improved RRT algorithm of local path planning for vehicle collision avoidance[J]. Journal of Hunan University (Natural Sciences), 2017, 44(4): 30-37. | |
| 18 | Lavalle S M . Rapidly-exploring random trees:a new tool for path planning[J]. Algorithmic & Computational Robotics New Directions, 1998(11): 293-308. |
| 19 | 宗长富, 韩小健, 赵伟强, 等 . 基于动态LTR的客车防侧翻控制[J]. 中国公路学报, 2016, 29(9): 136-142. |
| Zong Chang-fu , Han Xiao-jian , Zhao Wei-qiang , et al . Anti-rollover control of bus based on dynamic LTR[J]. China Journal of Highway and Transport, 2016, 29(9): 136-142. | |
| 20 | Ericson C . 实时碰撞检测算法技术[M]. 刘天慧, 译. 北京: 清华大学出版社, 2010. |
| 21 | Hill J D , Boyle L N . Driver stress as influenced by driving maneuvers and roadway conditions[J]. Transportation Research Part F, 2007, 10(3): 177-186. |
| 22 | Elbenhawi M , Simic M , Nakhaie J G . Continuous-curvature bounded trajectory planning using parametric splines[J]. Frontiers in Artificial Intelligence & Applications, 2014, 262: 513-522. |
| [1] | 马芳武,韩露,周阳,王世英,蒲永锋. 采用聚乳酸复合材料的汽车零件多材料优化设计[J]. 吉林大学学报(工学版), 2019, 49(5): 1385-1391. |
| [2] | 高振海,孙天骏,何磊. 汽车纵向自动驾驶的因果推理型决策[J]. 吉林大学学报(工学版), 2019, 49(5): 1392-1404. |
| [3] | 张博,张建伟,郭孔辉,丁海涛,褚洪庆. 路感模拟用永磁同步电机电流控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1405-1413. |
| [4] | 王鹏宇,赵世杰,马天飞,熊晓勇,程馨. 基于联合概率数据关联的车用多传感器目标跟踪融合算法[J]. 吉林大学学报(工学版), 2019, 49(5): 1420-1427. |
| [5] | 胡兴军,惠政,郭鹏,张扬辉,张靖龙,王靖宇,刘飞. 基于流固耦合的汽车气动特性[J]. 吉林大学学报(工学版), 2019, 49(5): 1414-1419. |
| [6] | 李静,石求军,刘鹏,户亚威. 基于纵向车速估算的商用车ABS神经网络滑模控制[J]. 吉林大学学报(工学版), 2019, 49(4): 1017-1025. |
| [7] | 杨顺,蒋渊德,吴坚,刘海贞. 基于多类型传感数据的自动驾驶深度强化学习方法[J]. 吉林大学学报(工学版), 2019, 49(4): 1026-1033. |
| [8] | 陈鑫,李铭,阮新建,王宁,王佳宁. 基于浸入单元法和延迟分离涡模型的Ahmed车模尾流涡旋结构[J]. 吉林大学学报(工学版), 2019, 49(4): 1034-1042. |
| [9] | 周华,杨志刚,朱晖. 基于整车风洞试验的MIRA车型数值计算[J]. 吉林大学学报(工学版), 2019, 49(4): 1043-1053. |
| [10] | 陈吉清,刘蒙蒙,兰凤崇. 三元动力电池及其成组后的过充安全性试验[J]. 吉林大学学报(工学版), 2019, 49(4): 1072-1080. |
| [11] | 柳润东,毛军,郗艳红,张宏宇,彭飞. 横风下高速列车会车压力波对风障的气动冲击[J]. 吉林大学学报(工学版), 2019, 49(4): 1054-1062. |
| [12] | 秦国锋,那景新,慕文龙,谭伟,栾建泽,申浩. 高温老化对CFRP/铝合金粘接接头失效的影响[J]. 吉林大学学报(工学版), 2019, 49(4): 1063-1071. |
| [13] | 张立斌,吴岛,单洪颖,邓祥敬. 基于制动试验台架的多轴车轴荷自调系统设计[J]. 吉林大学学报(工学版), 2019, 49(4): 1081-1091. |
| [14] | 李寿涛,李秋媛,刘辉,丁辉,田彦涛,于丁力. 可实现车辆稳定性控制的滑模变结构策略[J]. 吉林大学学报(工学版), 2019, 49(4): 1288-1292. |
| [15] | 常成,宋传学,张雅歌,邵玉龙,周放. 双馈电机驱动电动汽车变频器容量最小化[J]. 吉林大学学报(工学版), 2018, 48(6): 1629-1635. |
|
||