吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (3): 1097-1105.doi: 10.13229/j.cnki.jdxbgxb20200065
• 通信与控制工程 • 上一篇
基于扰动观测器的轮式移动机器人滚动时域路径跟踪控制
于树友1,2( ),常欢2,孟凌宇2,郭洋2,曲婷1()
),常欢2,孟凌宇2,郭洋2,曲婷1()
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.吉林大学 通信工程学院,长春 130022
Disturbance observer based moving horizon control for path following problems of wheeled mobile robots
Shu-you YU1,2(),Huan CHANG2,Ling-yu MENG2,Yang GUO2,Ting QU1()
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
摘要:
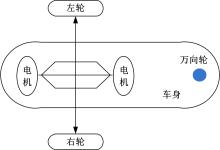
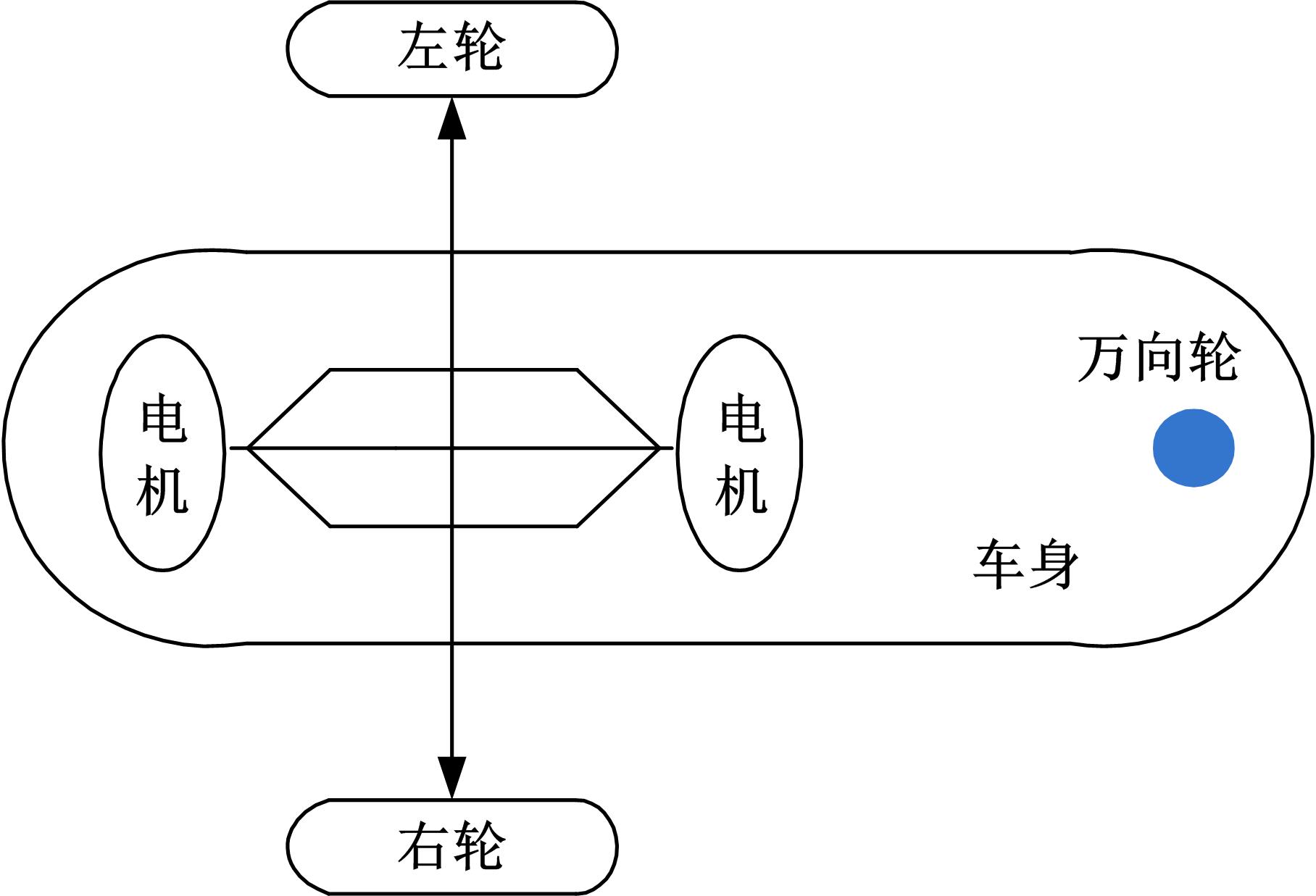
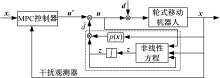
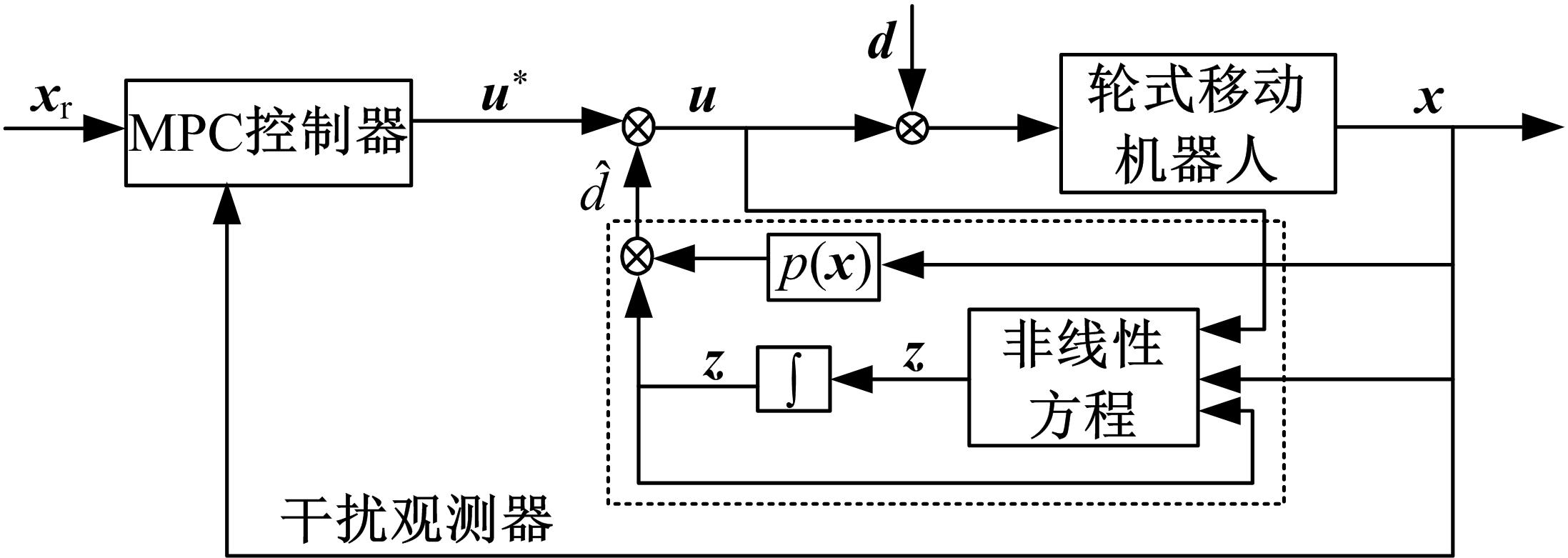
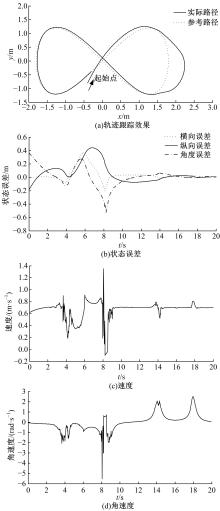
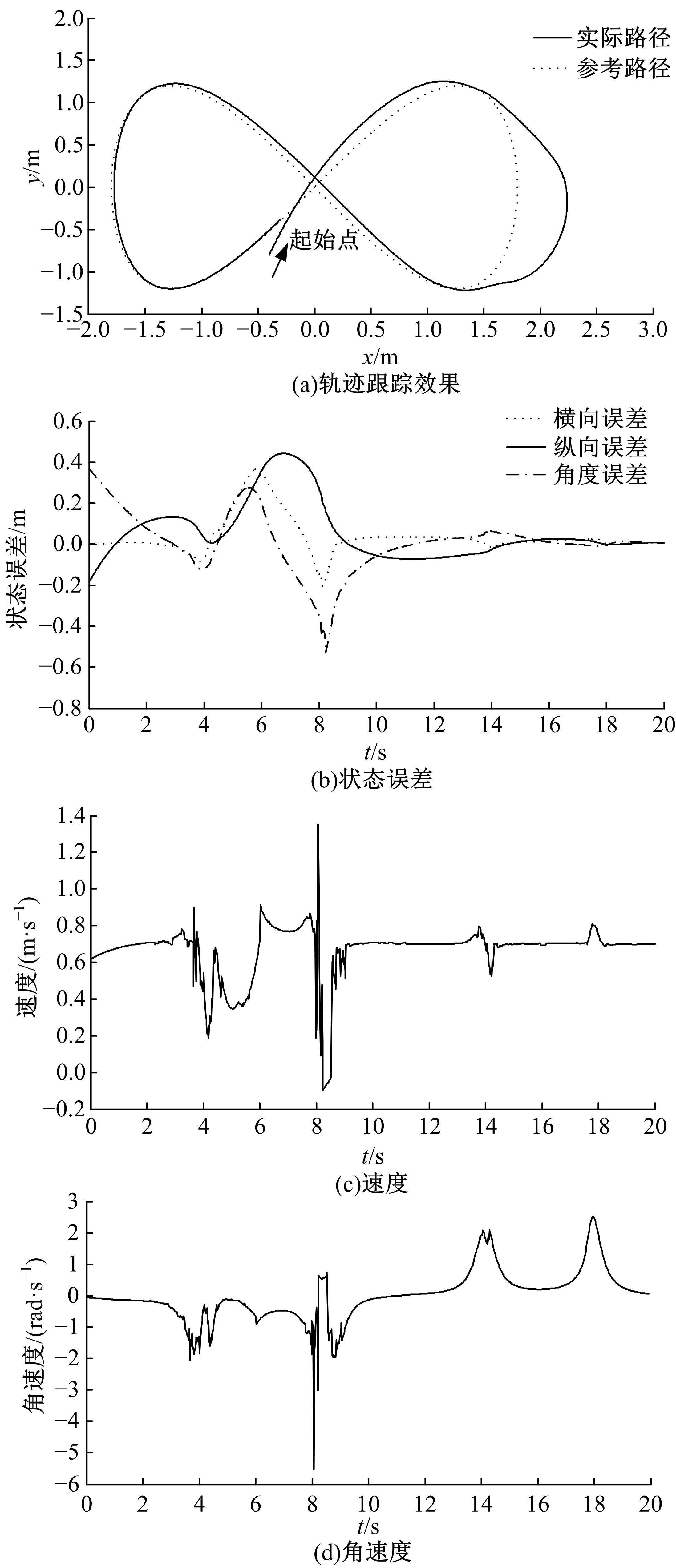
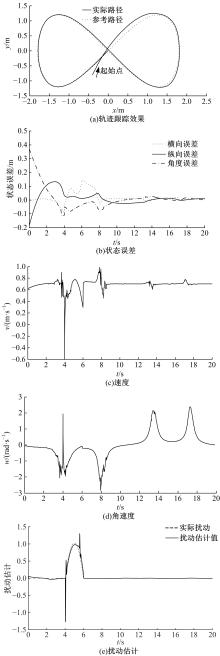
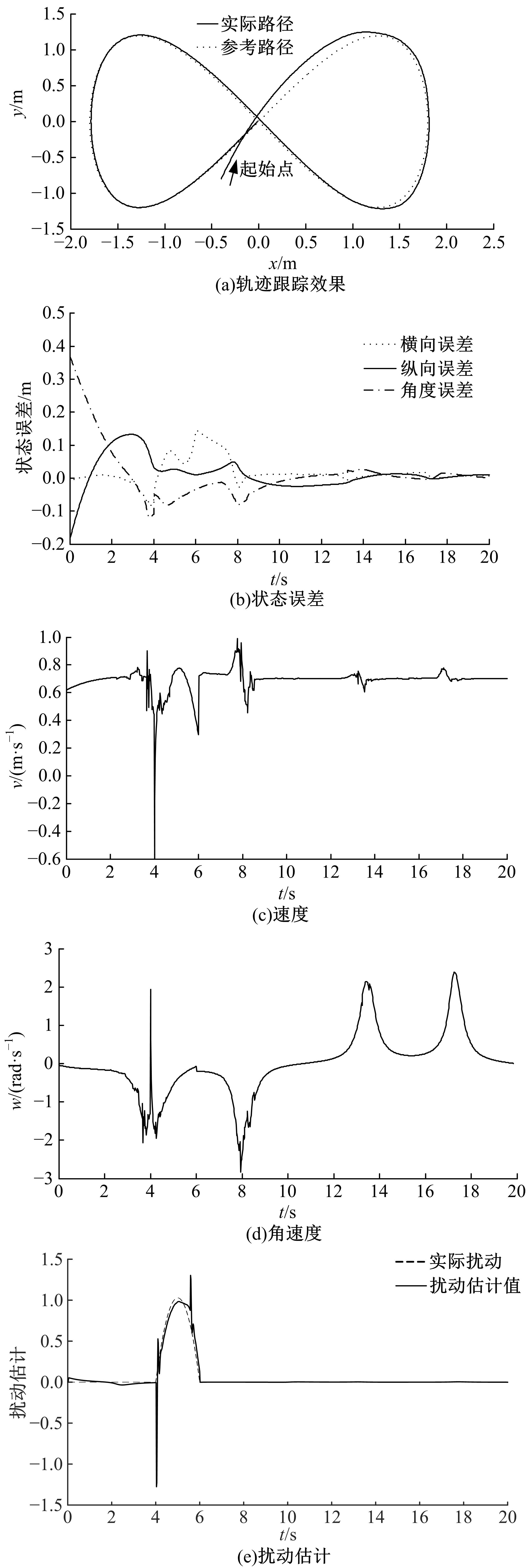
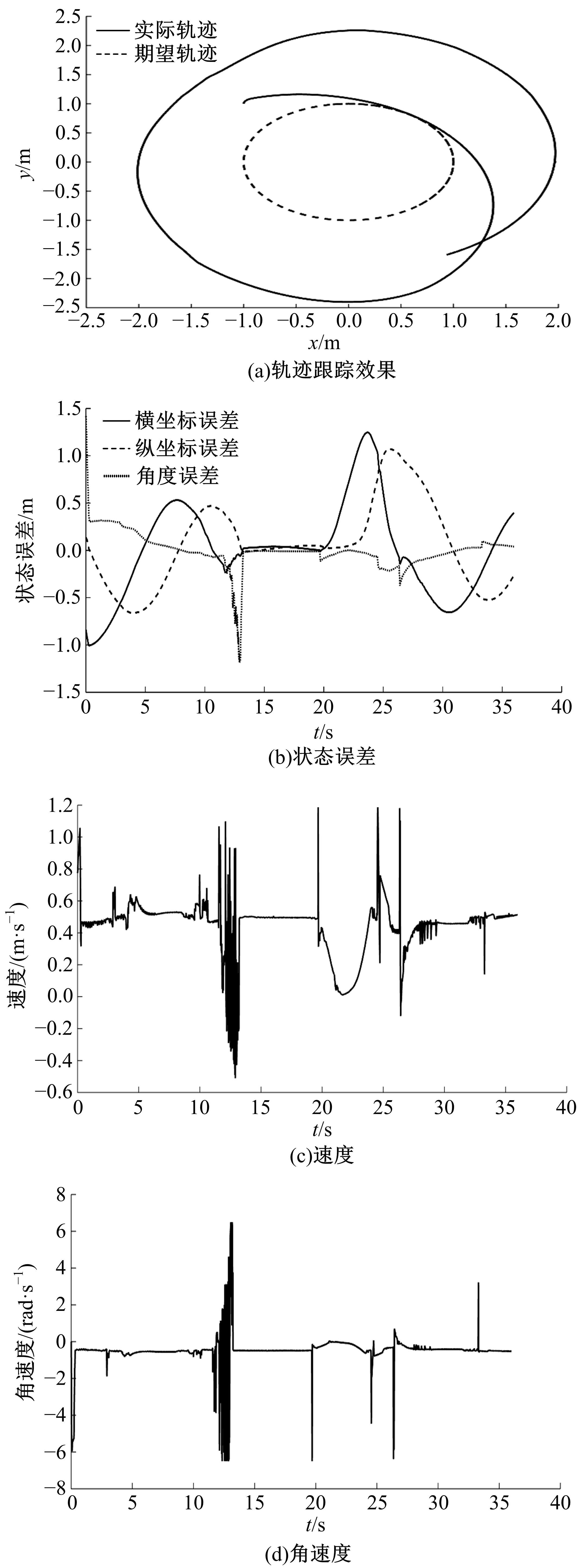
轮式移动机器人路径跟踪控制问题中通常存在状态约束和输入约束,并且系统运行时容易受到外部扰动的影响。本文基于非线性扰动观测器提出了一种轮式移动机器人滚动时域路径跟踪控制策略。当没有外部扰动作用于系统时,滚动时域控制算法可以满足控制约束和状态约束,并且使得轮式移动机器人跟踪期望的轨迹;当存在外部干扰,尤其是慢变扰动时,非线性扰动观测器能够估计扰动,并通过反馈补偿扰动对轮式移动机器人移动轨迹的影响。仿真结果表明,在外部干扰存在的情况下该控制策略能够保证移动机器人渐近跟踪期望路径。
中图分类号:
- TP273





| 1 | Brockett R. Asymptotic stability and feedback stabilization[J]. Differential Geometry Control Theory, 1983, 27(3): 181-191. |
| 2 | Kanayama Y, Kimura Y, Miyazaki F, et al. A stable tracking control method for an autonomous mobile robot[C]∥IEEE International Conference on Robotics & Automation, Cincinnati, USA, 1990: 384-389. |
| 3 | Luca A D, Benedetto M D D. Control of non-holonomic systems via dynamic compensation[J]. Kybernetika Praha, 1993, 29(6): 593-608. |
| 4 | D' Andrea-Novel B, Campion G, Bastin G. Control of nonholonomic wheeled mobile robots by state feedback linearization[J]. International Journal of Robotics Research, 1995, 14(6): 543-559. |
| 5 | Samson C, Ait-Abderrahim K. Feedback control of a nonholonomic wheeled cart in Cartesian sp- ace[C]∥IEEE International Conference on Robotics & Automation, California, USA, 1991:1136-1141. |
| 6 | Fierro R, Lewis F L. Control of a nonholonomic mobile robot: backstepping kinematics into dynamics[C]∥Proceedings of 34th IEEE Conference on Decision and Control, New Orleans, LA, 1995: 3805-3810. |
| 7 | Indiveri G. Kinematic time-invariant control of a 2-D nonholonomic vehicle[C]∥Proceedings of 38th IEEE Conference on Decision and Control, Phoenix, USA, 1999: 2112-2117. |
| 8 | Jiang Z P, Nijmeijer H. Tracking control of mobile robots: a case study in backstepping[J]. Automatica, 1997, 33(7): 1393-1399. |
| 9 | Bloch A, Drakunov S. Tracking in nonholonomic dynamic systems via sliding modes[C]∥IEEE Conference on Decision & Control, New Orleans, USA, 1995: 2103-2106. |
| 10 | 朱亮, 姜长生, 张春雨. 基于径向基神经网络干扰观测器的空天飞行器自适应轨迹线性化控制[J]. 航空学报,2007,28(3):673-677. |
| Zhu Liang,Jiang Chang-sheng,Zhang Chun-yu. Adaptive trajectory linearization control for aerospace vehicle based on RBFNN disturbance observer[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(3): 673-677. | |
| 11 | 于靖,陈谋,姜长生. 基于观测器的非线性不确定系统自适应滑模控制[J]. 控制理论与应用,2014,31(8):993-999. |
| Yu Jing,Chen Mou,Jiang Chang-sheng. Adaptive sliding mode control for nonlinear uncertain systems based on disturbance observer[J]. Control Theory & Applications, 2014, 31(8):993-999. | |
| 12 | 王晓飞,邹早建,李铁山,等. 欠驱动船舶鲁棒路径跟踪控制器设计[J].航海工程, 2009, 38(5):16-18. |
| Wang Xiao-fei,Zou Zao-jian,Li Tie-shan,et al. Robust path following controller design of under-actuated ships[J]. Ship & Ocean Engineering, 2009,38(5):16-18. | |
| 13 | Chen Wen-hua, Yang Jun, Guo Lei, et al. Disturbance-observer-based control and related methos—an overview[J]. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1083-1095. |
| 14 | Liu Cun-jia, Chen Wen-hua, Andrews J. Trajectory tracking of small helicopters using explicit nonlinear MPC and DOBC[J]. IFAC Proceedings Volumes, 2011,44(1):1498-1503. |
| 15 | 许坤,陈谋. 基于干扰观测器的移动机器人轨迹跟踪控制[J]. 应用科学学报,2016,34(2):177-189. |
| Xu Kun,Chen Mou. Control of trajectory tracking of mobile robots based on disturbance observer[J]. Journal of Applied Sciences, 2016,34(2):177-189. | |
| 16 | Yu S, Li X, Chen H, et al. Nonlinear model predictive control for path following problem[J]. International Journal of Robust & Nonlinear Control, 2015, 25(8):1168-1182. |
| 17 | Faulwasser T. Optimization-based Solutions to Constrained Trajectory-tracking and Path Following Problems[M]. Germany: Aachen, Shaker Verlag, 2013. |
| 18 | Liu Y, Yu S, Gao B, et al. Receding horizon following control of wheeled mobile robots: a case study[C]∥IEEE International Conference on Mechatronics & Automation, Beijing, China, 2015: 2571-2576. |
| 19 | 刘洋. 基于模型预测控制的移动机器人路径跟踪控制[D]. 长春:吉林大学通信工程学院,2016. |
| Liu Yang. Path following control of wheeled mobile robots based on model predictive control[D]. Chang-chun:College of Communication Engineering, Jilin University, 2016. | |
| 20 | Chen Wen-hua. Disturbance observer based control for nonlinear system[J]. IEEE/ASME Transaction on Mechatronics, 2004,9(4):706-710. |
| 21 | Yu S Y, Guo Y, Meng L Y, et al. MPC for path following problems of wheeled mobile robots[J]. IFAC, 2018,51(20):247-252. |
| 22 | 胡准庆,房海容,彭俊斌,等. 机器人奇异性分析[J]. 机器人技术与应用,2001(6):32-35. |
| Hu Huai-qing,Fang Hai-rong,Peng Jun-bin,et al. Robot singularity analysis[J]. Robot Technique and Application, 2001(6):32-35. | |
| 23 | 赵韩, 尹晓红, 吴焱明. 非完整约束AGV轨迹跟踪的非线性预测控制[J]. 中国机械工程, 2011,22(6):681-686. |
| Zhao Han,Yin Xiao-hong,Wu Yan-ming. Nonlinear model pridictive control of trajectory tracking for nonholonomic AGV[J]. China Mechanical Engineering, 2011,22(6):681-686. | |
| 24 | Khalil H K. Nonlinear Systems[M]. 3rd ed. Upper Saddle River: Prentice Hall, 2002. |
| [1] | 何德峰,罗捷,舒晓翔. 自主网联车辆时滞反馈预测巡航控制[J]. 吉林大学学报(工学版), 2021, 51(1): 349-357. |
| [2] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [3] | 王伟,赵健廷,胡宽荣,郭永仓. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(2): 464-471. |
| [4] | 刘富,安毅,董博,李元春. 基于ADP的可重构机械臂能耗保代价分散最优控制[J]. 吉林大学学报(工学版), 2020, 50(1): 342-350. |
| [5] | 曲兴田,王学旭,孙慧超,张昆,闫龙威,王宏一. 熔融沉积成型技术3D打印机加热系统的模糊自适应PID控制[J]. 吉林大学学报(工学版), 2020, 50(1): 77-83. |
| [6] | 马常友, 高海波, 丁亮, 于海涛, 邢宏军, 邓宗全. 机器人末端执行器自更换机构设计及对接策略[J]. 吉林大学学报(工学版), 2019, 49(6): 2027-2037. |
| [7] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [8] | 于树友,谭雷,王伍洋,陈虹. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报(工学版), 2019, 49(3): 934-942. |
| [9] | 温海营,任翔,徐卫良,丛明,秦文龙,胡书海. 咀嚼机器人颞下颌关节仿生设计及试验测试[J]. 吉林大学学报(工学版), 2019, 49(3): 943-952. |
| [10] | 顾万里,王萍,胡云峰,蔡硕,陈虹. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1811-1819. |
| [11] | 李战东,陶建国,罗阳,孙浩,丁亮,邓宗全. 核电水池推力附着机器人系统设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1820-1826. |
| [12] | 赵爽,沈继红,张刘,赵晗,陈柯帆. 微细电火花加工表面粗糙度快速高斯评定[J]. 吉林大学学报(工学版), 2018, 48(6): 1838-1843. |
| [13] | 王德军, 魏薇郦, 鲍亚新. 考虑侧风干扰的电子稳定控制系统执行器故障诊断[J]. 吉林大学学报(工学版), 2018, 48(5): 1548-1555. |
| [14] | 闫冬梅, 钟辉, 任丽莉, 王若琳, 李红梅. 具有区间时变时滞的线性系统稳定性分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1556-1562. |
| [15] | 张茹斌, 占礼葵, 彭伟, 孙少明, 刘骏富, 任雷. 心肺功能评估训练系统的恒功率控制[J]. 吉林大学学报(工学版), 2018, 48(4): 1184-1190. |
|
||