吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (1): 342-350.doi: 10.13229/j.cnki.jdxbgxb20181217
• 通信与控制工程 • 上一篇
基于ADP的可重构机械臂能耗保代价分散最优控制
刘富1,2( ),安毅1,董博3,李元春2,3()
),安毅1,董博3,李元春2,3()
- 1. 吉林大学 通信工程学院,长春 130022
2. 北京理工大学 智能机器人与系统高精尖创新中心,北京 100081
3. 长春工业大学 电气与电子工程学院,长春 130012
Decentralized energy guaranteed cost decentralized optimal control of reconfigurable robots based on ADP
Fu LIU1,2(),Yi AN1,Bo DONG3,Yuan-chun LI2,3()
- 1. College of Communication Engineering,Jilin University, Changchun 130022, China
2. Beijing Advanced Innovation Center for Intelligent Robots and Systems, Beijing Institute of Technology, Beijing 100081, China
3. College of Electrical and Electronic Engineering,Changchun University of Technology, Changchun 130012, China
摘要:
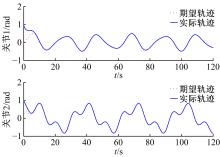
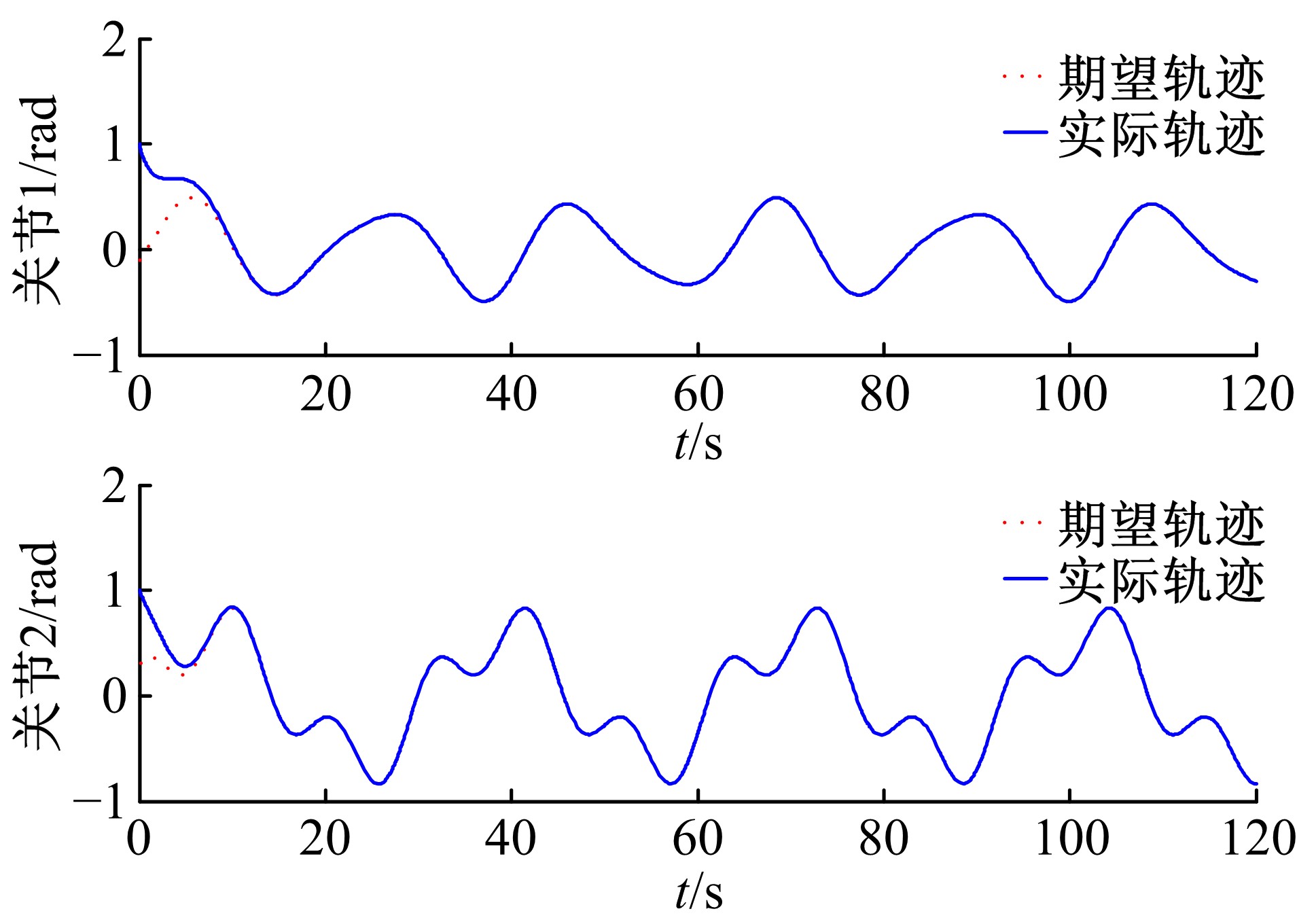
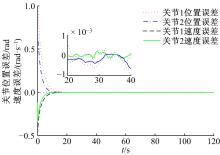
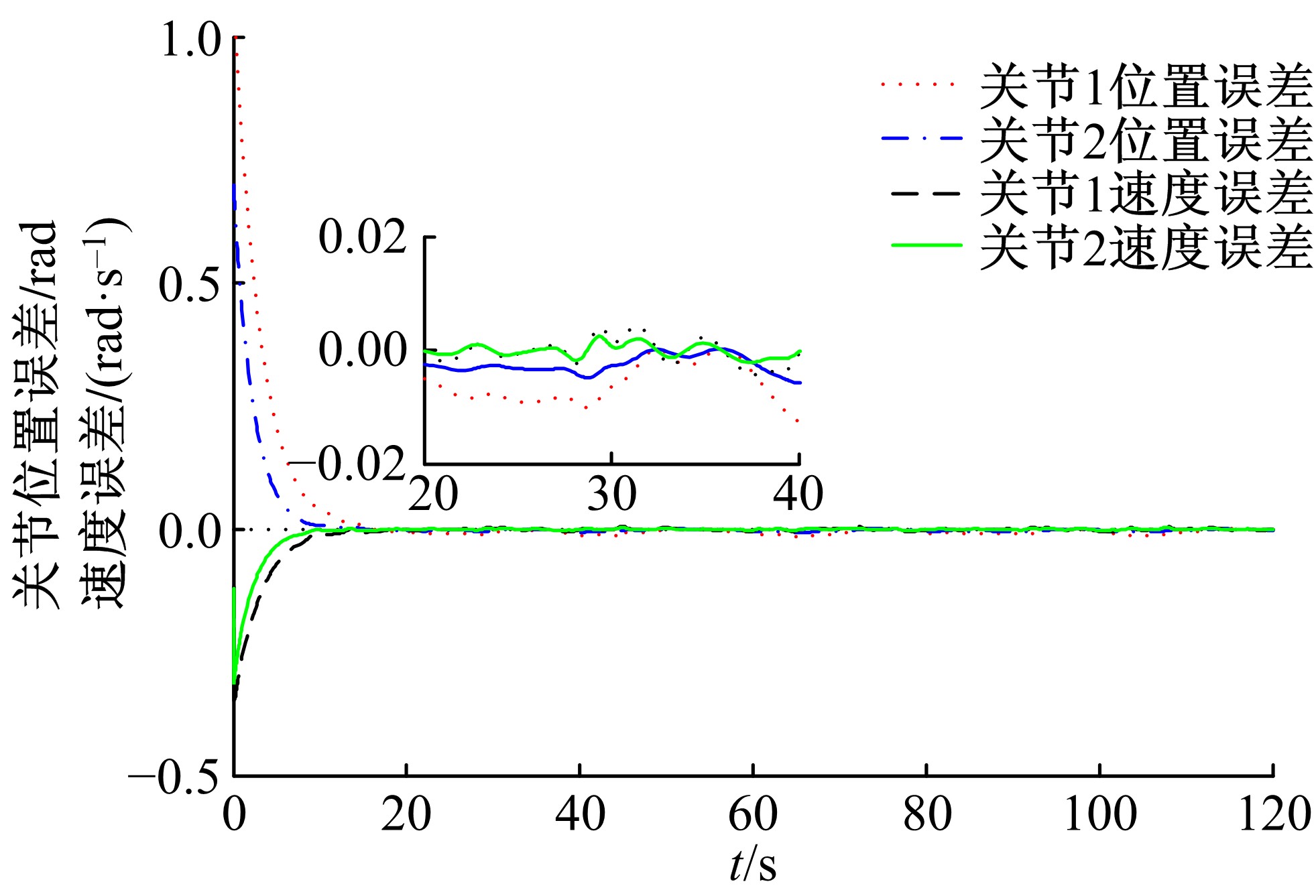
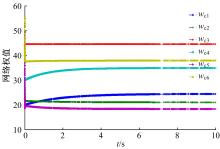
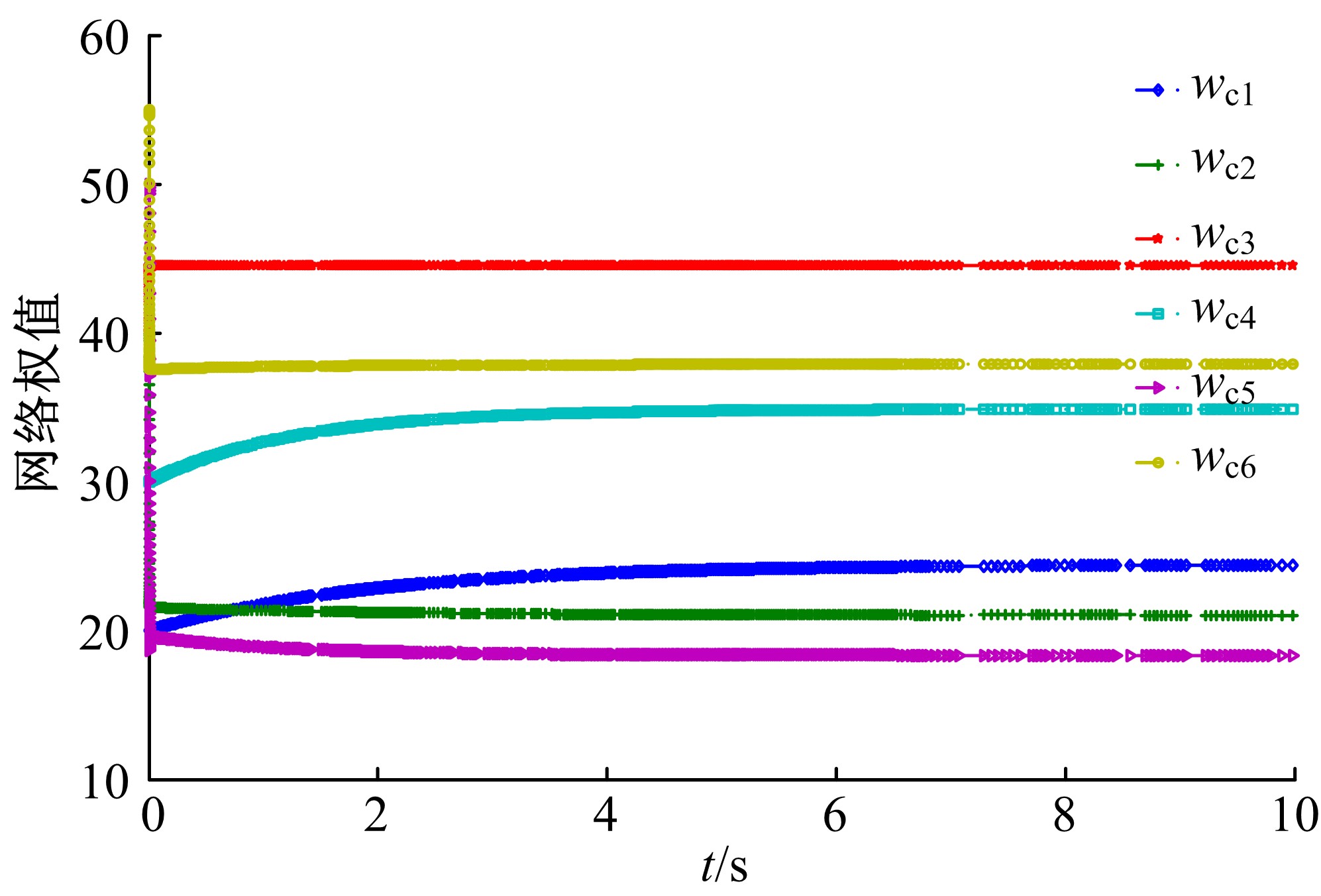
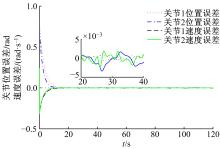
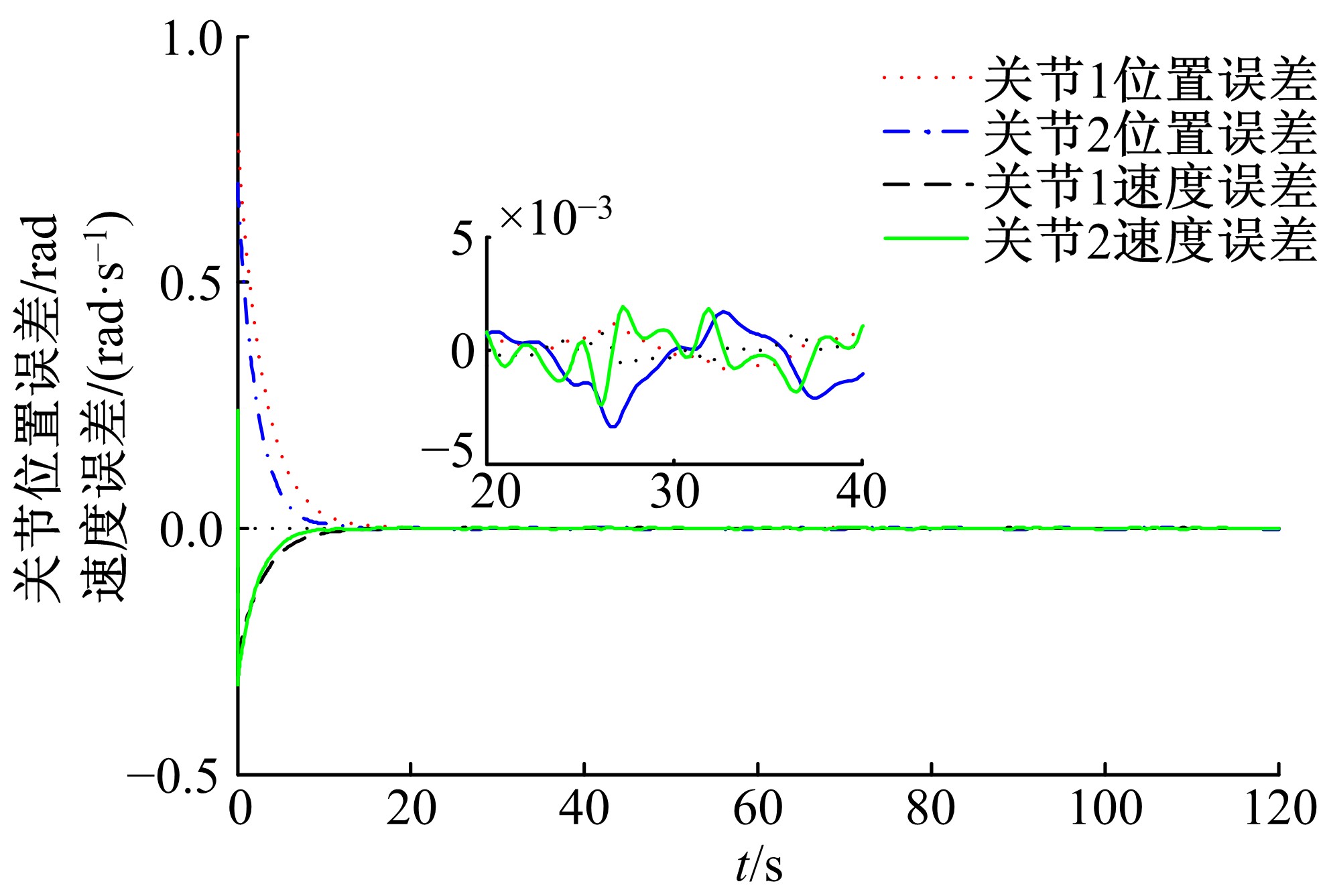
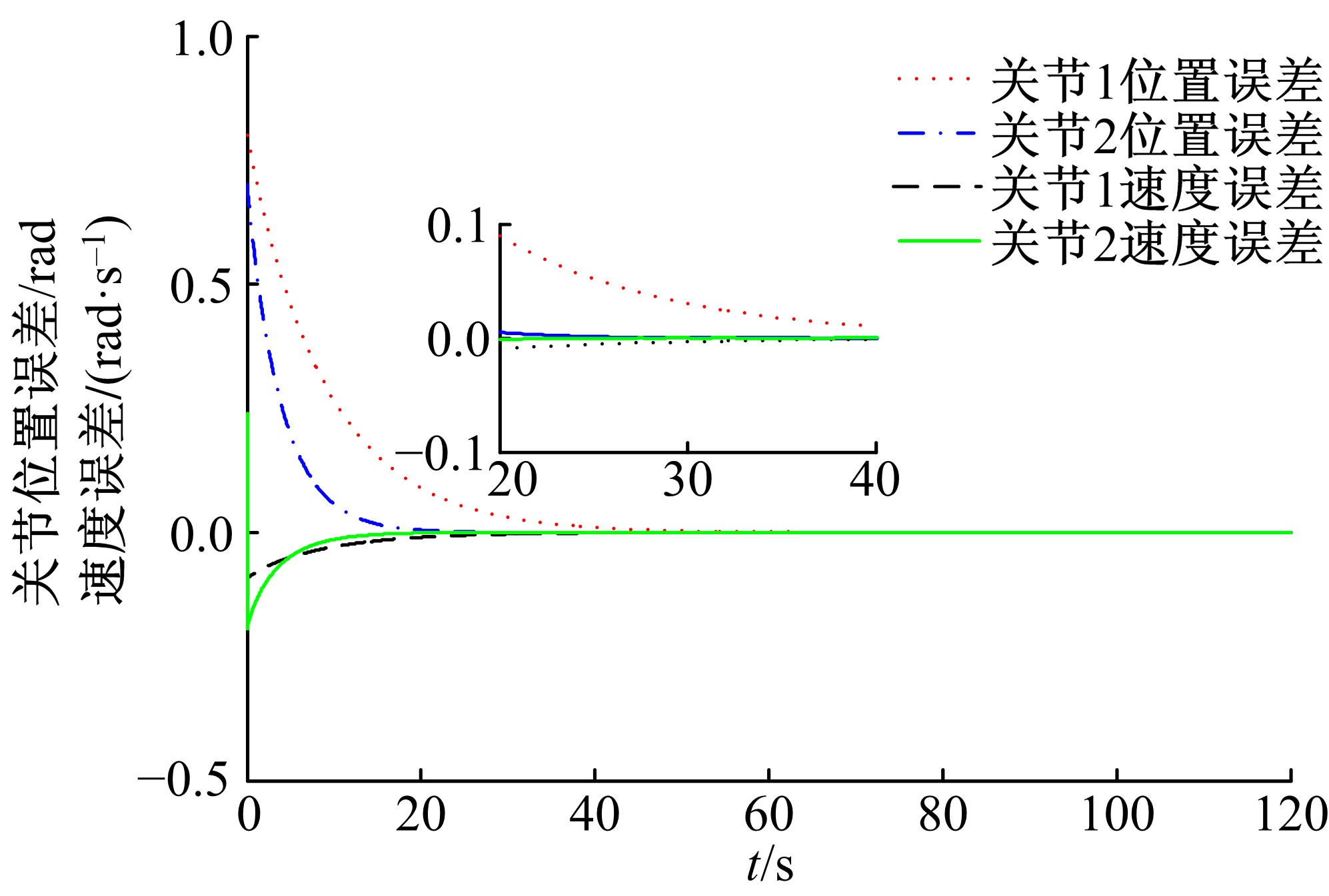
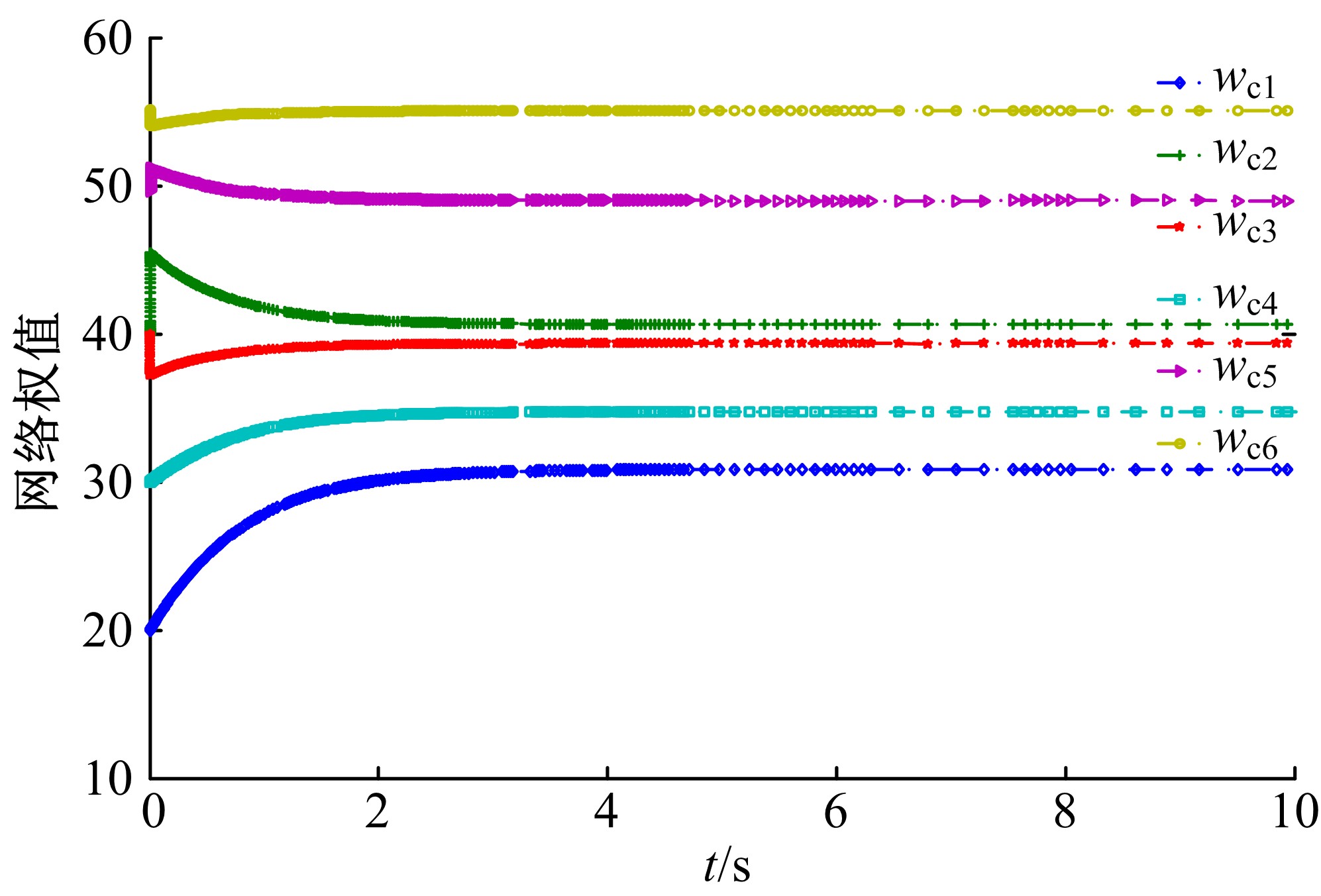
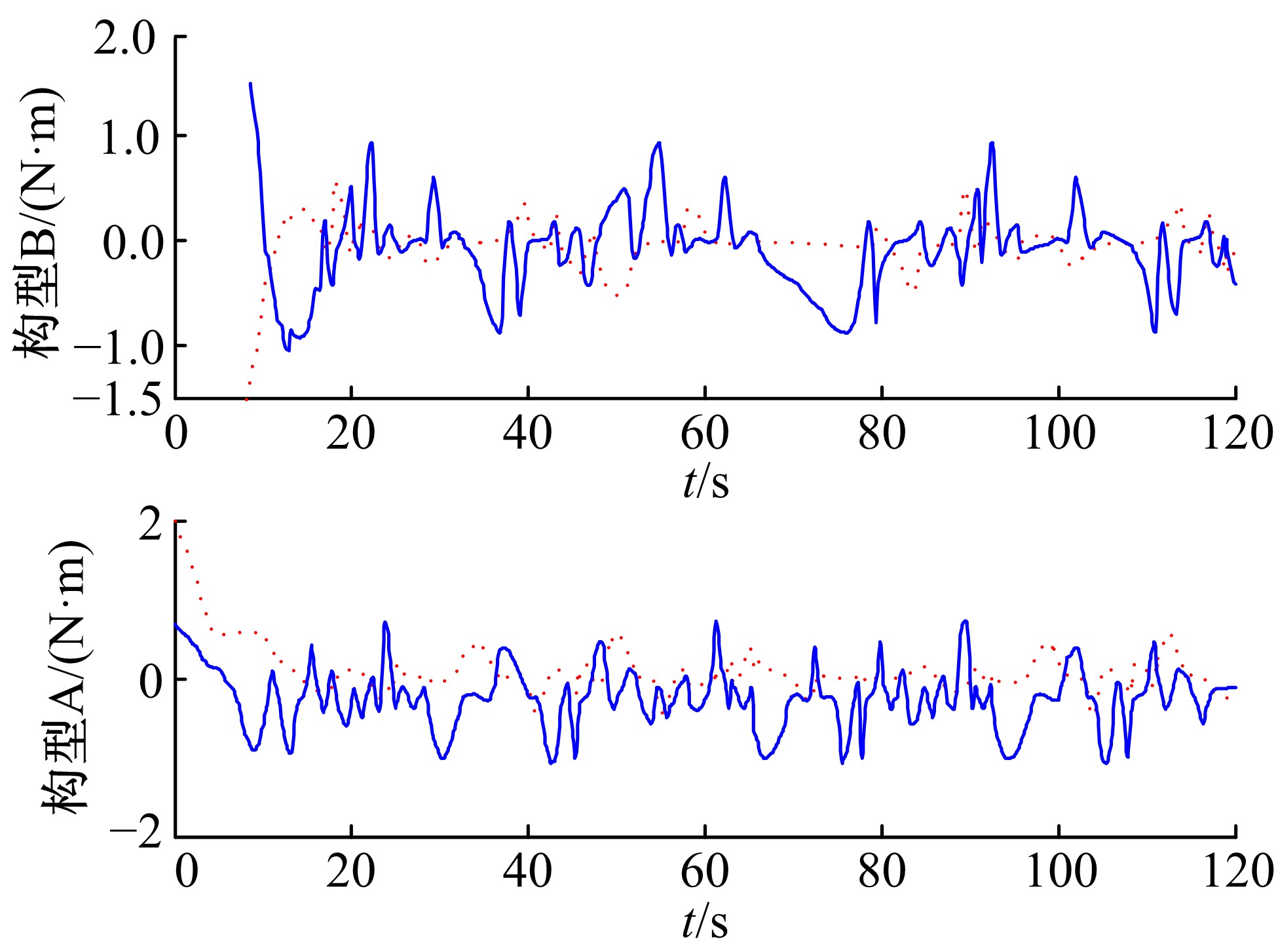
针对存在耦合交联不确定性的可重构机械臂系统分散控制问题,提出一种基于自适应动态规划(ADP)的能耗保代价最优控制方法。基于关节力矩量测信息,建立了可重构机械臂系统的动力学模型,通过定义兼顾控制精度与能耗的性能指标函数构建哈密顿雅可比贝尔曼(HJB)方程,采用基于策略迭代(PI)的ADP算法对HJB方程进行求解,继而得到近似最优控制策略。基于Lyapunov理论对闭环可重构机械臂系统渐近稳定性进行证明,数值仿真结果验证了本文算法有效性。
中图分类号:
- TP273



| 1 | Dong B , Zhou F , Liu K , et al . Torque sensorless decentralized neuro-optimal control for modular and reconfigurable robots with uncertain environments[J]. Neurocomputing, 2018, 282: 60-73. |
| 2 | Zhang T , Zhang W , Gupta M M . An underactuated self-reconfigurable robot and the reconfiguration evolution[J]. Mechanism and Machine Theory, 2018, 124: 248-258. |
| 3 | Zhou F , Dong B , Li Y . Torque sensorless force/position decentralized control for constrained, reconfigurable manipulator with harmonic drive transmission[J]. International Journal of Control, Automation and Systems, 2017, 15(5): 2364-2375. |
| 4 | 董博, 刘克平, 李元春 . 受动态约束的谐波传动式可重构模块[J] .控制与决策, 2016, 31(3): 441-447. |
| Dong Bo , Liu Ke-ping , Li Yuan-chun . Decentralized integral sliding mode control for time varying constrained modular and reconfigurable robot based on harmonic drive transmission[J]. Control and Decision, 2016, 31(3): 441-447. | |
| 5 | Dong B , Liu K , Li Y . Decentralized control of harmonic drive based modular robot manipulator using only position measurements: theory and experimental verification[J]. Journal of Intelligent and Robotic Systems, 2017, 88(1): 3-18. |
| 6 | Zhao B , Liu D , Li Y . Online fault compensation control based on policy iteration algorithm for a class of affine nonlinear systems with actuator failures[J]. IET Control Theory & Applications, 2016, 10(15): 1816-1823. |
| 7 | 张化光, 张欣, 罗艳红, 等 . 自适应动态规划综述[J] .自动化学报, 2013, 39(4): 303-311. |
| Zhang Hua-guang , Zhang Xin , Luo Yan-hong , et al . An overview of research on adaptive dynamic programming[J]. Acta Automatica Sinica, 2013, 39(4): 303-311. | |
| 8 | 殷林飞, 余 涛, 张泽宇, 等 . 基于深度自适应动态规划的孤岛主动配电网发电控制与优化一体化算法[J] .控制理论与应用, 2018, 35(2): 169-183. |
| Yin Lin-fei , Yu Tao , Zhang Ze-yu , et al . Deep adaptive dynamic programming based integration algorithm for generation control and optimization of islanded active distribution network[J]. Control Theory & Applications, 2018, 35(2): 169-183. | |
| 9 | 孙景亮, 刘春生 . 基于自适应动态规划的导弹制导律研究综述[J] .自动化学报, 2017, 43(7): 1101-1113. |
| Sun Jing-liang , Liu Chun-sheng . An overview on the adaptive dynamic programming based missile guidance law[J]. Acta Automatica Sinica, 2017, 43(7): 1101-1113. | |
| 10 | Yang Xiong , He Hai-bo . Adaptive critic designs for optimal control of uncertain nonlinear systems with unmatched interconnections[J]. Neural Networks, 2018, 105: 142-153. |
| 11 | Wang D , Liu D , Mu C , et al . Decentralized guaranteed cost control of interconnected systems with uncertainties: a learning-based optimal control strategy[J]. Neurocomputing, 2016, 214: 297-306. |
| 12 | Liu G , Abdul S , Goldenberg A A . Distributed control of modular and reconfigurable robot with torque sensing[J]. Robotica, 2008, 26(1): 75-84. |
| 13 | Liu G , Liu Y , Goldenberg A A , et al . Design, analysis, and control of a spring-assisted modular and reconfigurable robot[J]. ASME Transactions on Mechatronics, 2011, 16(4): 695-706. |
| 14 | Yi An , Bo Dong , Fan Zhou , et al . Decentralized guaranteed cost control of modular and reconfigurable robots based on adaptive dynamic programming[C]∥Proceedings of the 30th Chinese Control and Decision Conference, Shenyang, China,2018: 1237-1242. |
| [1] | 马常友, 高海波, 丁亮, 于海涛, 邢宏军, 邓宗全. 机器人末端执行器自更换机构设计及对接策略[J]. 吉林大学学报(工学版), 2019, 49(6): 2027-2037. |
| [2] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [3] | 于树友,谭雷,王伍洋,陈虹. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报(工学版), 2019, 49(3): 934-942. |
| [4] | 温海营,任翔,徐卫良,丛明,秦文龙,胡书海. 咀嚼机器人颞下颌关节仿生设计及试验测试[J]. 吉林大学学报(工学版), 2019, 49(3): 943-952. |
| [5] | 顾万里,王萍,胡云峰,蔡硕,陈虹. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1811-1819. |
| [6] | 李战东,陶建国,罗阳,孙浩,丁亮,邓宗全. 核电水池推力附着机器人系统设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1820-1826. |
| [7] | 赵爽,沈继红,张刘,赵晗,陈柯帆. 微细电火花加工表面粗糙度快速高斯评定[J]. 吉林大学学报(工学版), 2018, 48(6): 1838-1843. |
| [8] | 王德军, 魏薇郦, 鲍亚新. 考虑侧风干扰的电子稳定控制系统执行器故障诊断[J]. 吉林大学学报(工学版), 2018, 48(5): 1548-1555. |
| [9] | 闫冬梅, 钟辉, 任丽莉, 王若琳, 李红梅. 具有区间时变时滞的线性系统稳定性分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1556-1562. |
| [10] | 张茹斌, 占礼葵, 彭伟, 孙少明, 刘骏富, 任雷. 心肺功能评估训练系统的恒功率控制[J]. 吉林大学学报(工学版), 2018, 48(4): 1184-1190. |
| [11] | 董惠娟, 于震, 樊继壮. 基于激光测振仪的非轴对称超声驻波声场的识别[J]. 吉林大学学报(工学版), 2018, 48(4): 1191-1198. |
| [12] | 张士涛, 张葆, 李贤涛, 王正玺, 田大鹏. 基于零相差轨迹控制方法提升快速反射镜性能[J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
| [13] | 田彦涛, 张宇, 王晓玉, 陈华. 基于平方根无迹卡尔曼滤波算法的电动汽车质心侧偏角估计[J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [14] | 王林, 王洪光, 宋屹峰, 潘新安, 张宏志. 输电线路悬垂绝缘子清扫机器人行为规划[J]. 吉林大学学报(工学版), 2018, 48(2): 518-525. |
| [15] | 胡云峰, 王长勇, 于树友, 孙鹏远, 陈虹. 缸内直喷汽油机共轨系统结构参数优化[J]. 吉林大学学报(工学版), 2018, 48(1): 236-244. |
|
||