吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (4): 1482-1489.doi: 10.13229/j.cnki.jdxbgxb20200374
• 通信与控制工程 • 上一篇
非合作目标强跟踪容积卡尔曼滤波运动状态估计
谢少彪1,2( ),张宇3,温凯瑞3,张硕3,刘宗明3(),齐乃明1
),张宇3,温凯瑞3,张硕3,刘宗明3(),齐乃明1
- 1.哈尔滨工业大学 航天学院,哈尔滨 150090
2.上海航天技术研究院,上海 201109
3.上海航天控制技术研究所,上海 201109
Motion estimation for non-cooperative target based on strong tracking cubature Kalman filter
Shao-biao XIE1,2(),Yu ZHANG3,Kai-rui WEN3,Shuo ZHANG3,Zong-ming LIU3(),Nai-ming QI1
- 1.School of Astronautics,Harbin Institute of Technology,Harbin 150090,China
2.Shanghai Academy of Spaceflight Technology,Shanghai 201109,China
3.Shanghai Institute of Spaceflight Control Technology,Shanghai 201109,China
摘要:
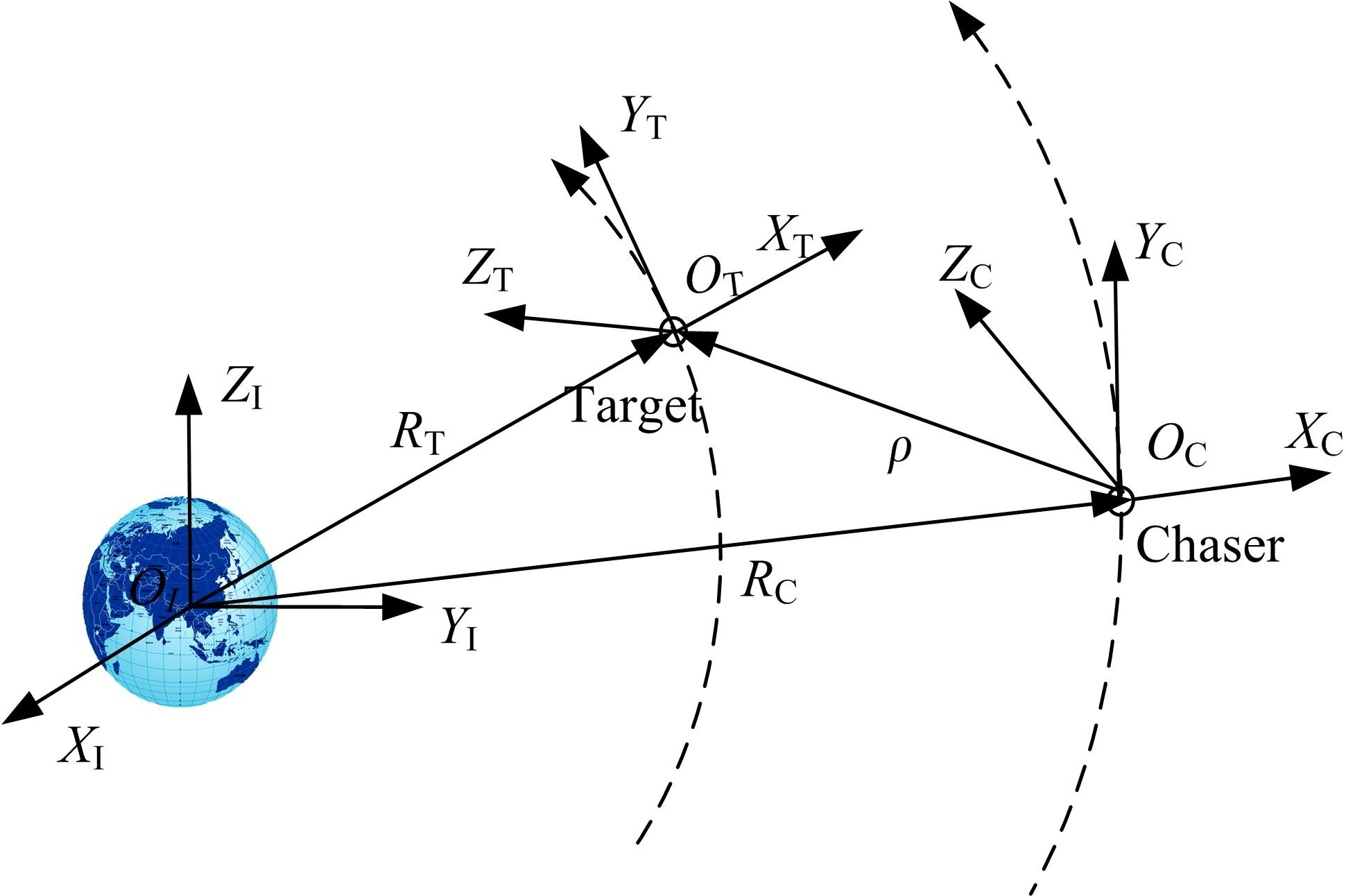
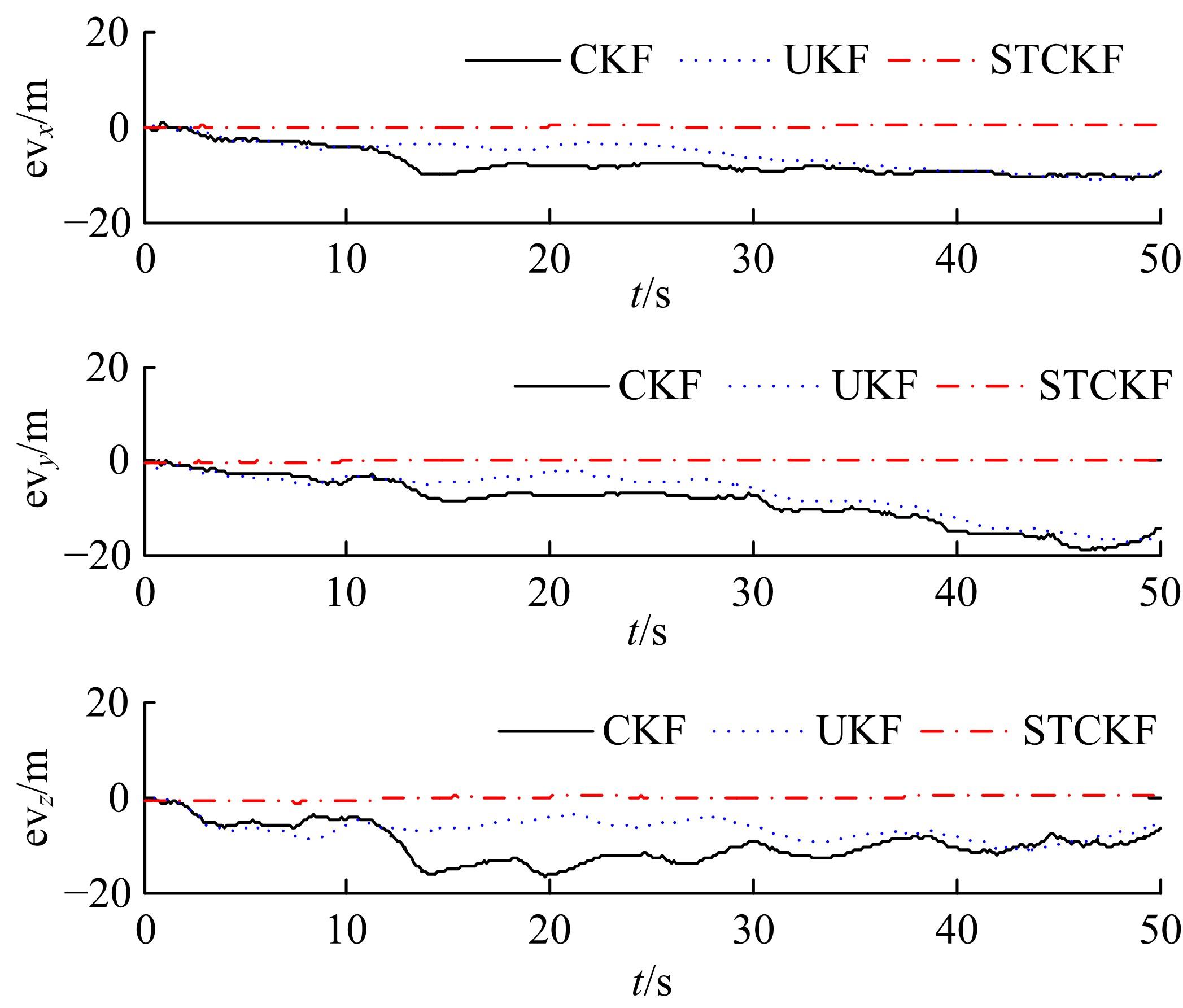
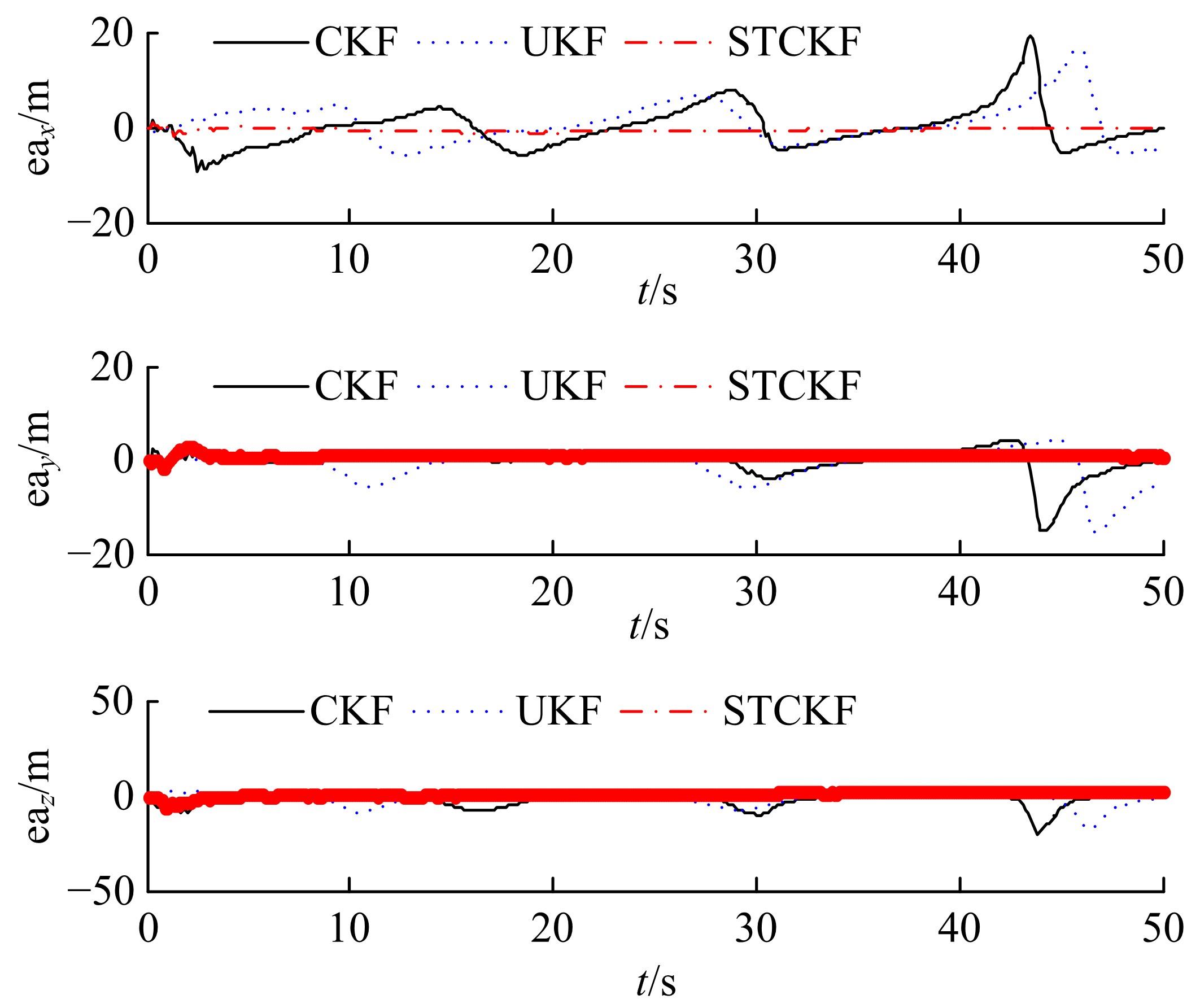
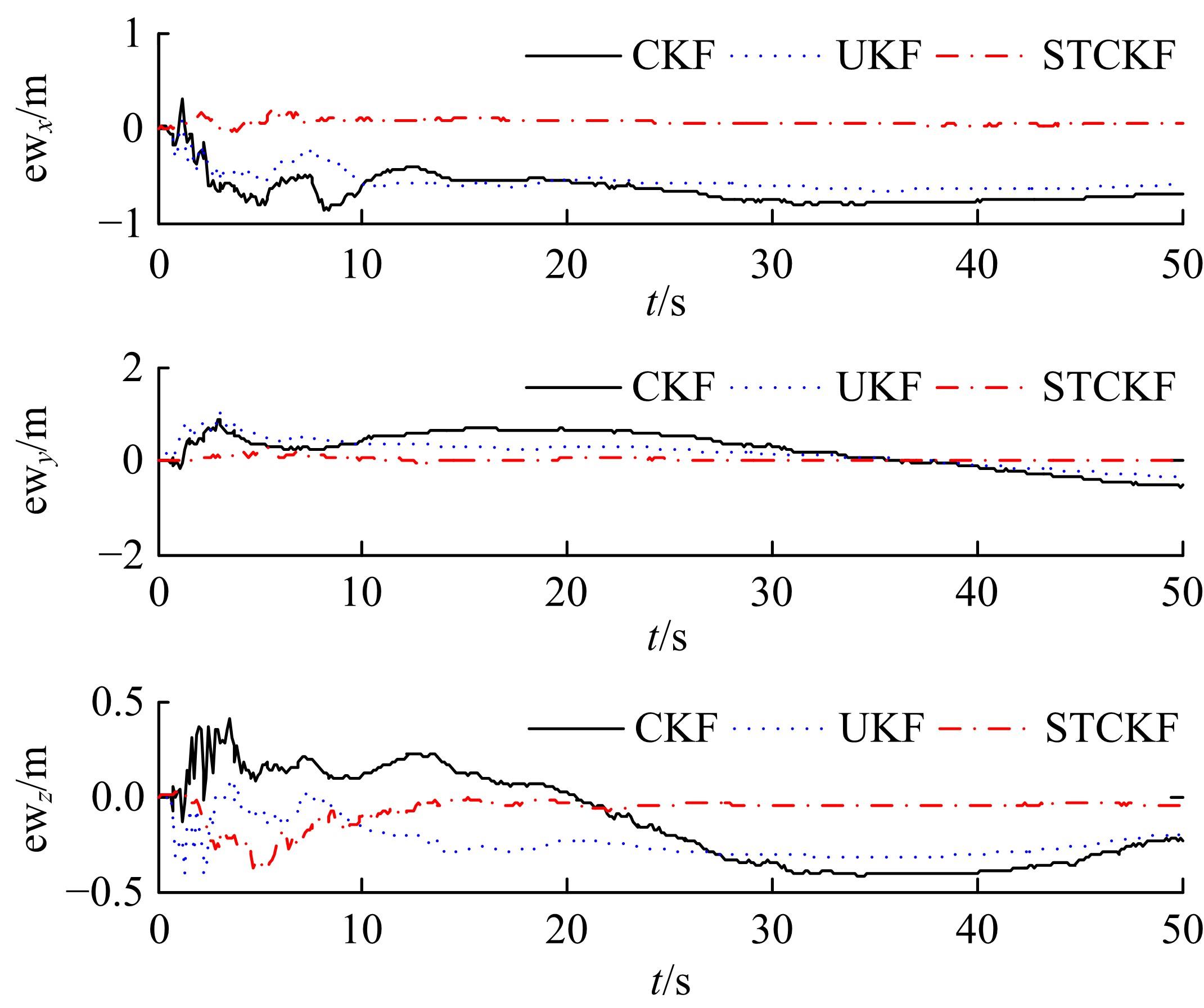
针对飞机、卫星等空天非合作目标运动状态估计时,由于视觉系统检测的特征发生变化会导致系统估计误差增大甚至发散等问题,提出了一种强跟踪容积卡尔曼滤波算法(STCKF)。在利用CW方程描述卫星相对运动时,考虑视觉测量系统的偏心安装,在STCKF预测状态误差协方差阵中引入次优渐消因子,通过在线调整增益,保证残差序列相互正交,使得当系统状态发生突变时仍能保证对系统跟踪的可靠性和稳定性。仿真结果表明,与标准无迹卡尔漫滤波(UKF)和容积卡尔曼滤波(CKF)算法相比,STCKF能够适应目标特征时变的情况,明显改善了目标跟踪的精度和稳定度。
中图分类号:
- V19






| 1 | Kelsey J M, Byrne J, Cosgrove M, et al. Vision-based relative pose estimation for autonomous rendezvous and docking[C]∥IEEE Conference on Aerospace,Big Sky, USA,2006:1-20. |
| 2 | Cropp A, Palmer P, Underwood C I. Pose estimation of target satellite for proximity operations[C]∥The 14th USU Conference on Small Satellites, Logan, USA, 2000,21:1-7. |
| 3 | Arantes G, Rocco E M, da Fonseca I M, et al. Far and proximity maneuvers of a constellation of service satellites and autonomous pose estimation of customer satellite using machine vision [J]. Acta Astronautica, 2010, 66 (9/10): 1493-1505. |
| 4 | Priggemeyer M, Dimartino M, Rossmann J. Pose estimation and trajectory calculation for autonomous close-range rendezvous and docking[C]∥IEEE International conference on Advanced Intelligent Mechatronics (AIM), Xiamen, China, 2015: 15-20. |
| 5 | Xu A, Namit G. SURF: speeded‐up robust features [C]∥The 9th European Conference on Computer Vision,Beijing, China, 2006:404-417. |
| 6 | Oumer N W, Panin G. Tracking and pose estimation of non-cooperative satellite for on-orbit servicing[C]∥ Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space, Kyoto, Japan,2012:379-387. |
| 7 | Segal S, Carmi A, Gurfil P. Vision-based relative state estimation of non-cooperative spacecraft under modeling uncertainty[C]∥Proceedings of the IEEE Aerospace Conference, New York, USA, 2011:1-8. |
| 8 | 刘宗明, 曹姝清, 张宇, 等. 非合作航天器逆深度参数化姿态估计[J]. 光学精密工程, 2017, 25(2): 451-459. |
| Liu Zong-ming, Cao Shu-qing, Zhang Yu. Inverse depth parametrization for attitude estimation of a non-cooperative spacecraft[J]. Optics and Precision Engineering, 2017, 25(2): 451-459. | |
| 9 | 刘宗明, 张宇, 卢山, 等. 非合作旋转目标闭环检测与位姿优化[J]. 光学精密工程, 2017, 25(4): 1036-1043. |
| Liu Zong-ming, Zhang Yu, Lu Shan. Loop detection and pose optimization for a rotating non-cooperative target[J]. Optics and Precision Engineering, 2017, 25(4): 1036-1043. | |
| 10 | Maessen D, Gill E. Relative state estimation and observability analysis for formation flying satellites[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(1): 321-326. |
| 11 | Julier S J, Uhlmann J K, Durrant-Whyte H F. New approach for filtering nonlinear systems[C]∥Proceedings of the American Control Conference, Seattle,USA,1995: 1628-1632. |
| 12 | Giannitrapani A, Ceccarelli N, Scortecci F, et al. Comparison of EKF and UKF for spacecraft localization via angle measurements[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(1): 75-84. |
| 13 | Burguera A, Oliver G, Gonzalez Y. Scan-based SLAM with trajectory correction in underwater environment[C]∥IEEE/RSJ International Conference on Inlelligent Robots and Systems, Taipei ,China, 2010:2546-2551. |
| 14 | Mallios A, Ridao P, Carreras M, et al. Navigating and mapping with the SPARUS AUV in natural and unstructured underwater enviroment[C]∥Processdings of the Oceans MTS/IEEE, Kona,USA, 2011:201-204. |
| 15 | Wang H J, Li C, Lv H L, et al. Research on com-pressed EKF based SLAM algorithm for unmanned underwater vehicle[C]∥Proceedings of 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, USA, 2012:402-407. |
| 16 | He B, Zang H J, Li C H, et al. Autonomous navigation for autonomous underwater vehicles based on information filters and active sensing[J]. Sensors, 2011, 11(11):10598-10980. |
| 17 | Arasaratnam I, Haykin S. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269. |
| 18 | Segal S, Gurfil P. Effect of kinematic rotation translation coupling on relative spacecraft translational dynamics[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(3): 1045-1050. |
| 19 | Kim S G, Crassidis J L, Cheng Y, et al. Kalman filtering for relative spacecraft attitude and position estimation[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(1): 133-143. |
| [1] | 周婧,张小宝,白云龙,侯丽新. 阈值迭代的单目视觉系统中像点质心定位[J]. 吉林大学学报(工学版), 2020, 50(5): 1796-1801. |
| [2] | 李静,石求军,洪良,刘鹏. 基于车辆状态估计的商用车ESC神经网络滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1545-1555. |
| [3] | 李静,石求军,刘鹏,户亚威. 基于纵向车速估算的商用车ABS神经网络滑模控制[J]. 吉林大学学报(工学版), 2019, 49(4): 1017-1025. |
| [4] | 贾洪飞, 李永行, 杨丽丽. 基于交通状态估计的快速路交通联合控制[J]. 吉林大学学报(工学版), 2017, 47(1): 76-81. |
| [5] | 刘瑜,何友,王海鹏,董凯. 基于平方根容积卡尔曼滤波的目标状态与传感器偏差扩维联合估计算法[J]. 吉林大学学报(工学版), 2015, 45(1): 314-321. |
| [6] | 高振海, 王竣, 佟静, 李红建, 郭章勇, 娄方明. 车载毫米波雷达对前方目标的运动状态估计[J]. 吉林大学学报(工学版), 2014, 44(6): 1537-1544. |
| [7] | 李学军, 杨晟, 李振举, 杨阿华, 刘涛. 与高精度单点匹配式定位算法[J]. 吉林大学学报(工学版), 2014, 44(4): 1197-1202. |
| [8] | 杨澜, 赵祥模, 惠飞, 周经美, 史昕. 入侵式野草优化粒子滤波方法[J]. 吉林大学学报(工学版), 2013, 43(04): 1070-1075. |
| [9] | 周婧, 高印寒, 陈小林, 刘长英, 刘静. 基于单摄像机视觉测量系统的网络化数据融合[J]. 吉林大学学报(工学版), 2013, 43(01): 92-97. |
| [10] | 刘长英, 高乐, 高印寒, 车仁生. 单目视觉坐标测量方法[J]. 吉林大学学报(工学版), 2010, 40(05): 1278-1282. |
| [11] | 田承伟,宗长富,王祥,姜国彬,何磊. 线控转向汽车传感器的容错控制[J]. 吉林大学学报(工学版), 2010, 40(01): 6-0012. |
| [12] | 李立涛, 杨旭,李顺利 . 针对非合作目标的中距离相对导航方法[J]. 吉林大学学报(工学版), 2008, 38(04): 986-990. |
|
||