吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (5): 1545-1555.doi: 10.13229/j.cnki.jdxbgxb20190535
• 车辆工程·机械工程 •
基于车辆状态估计的商用车ESC神经网络滑模控制
李静1( ),石求军1,洪良2,刘鹏1
),石求军1,洪良2,刘鹏1
- 1.吉林大学 汽车仿真与控制国家重点实验室, 长春 130022
2.一汽解放汽车有限公司 商用车开发院,长春 130011
Commercial vehicle ESC neural network sliding mode control based on vehicle state estimation
Jing LI1(),Qiu-jun SHI1,Liang HONG2,Peng LIU1
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.Commercial Vehicle Development Institute, FAW Jiefang Automotive CO. LTD. , Changchun 130011, China
摘要:
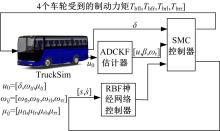
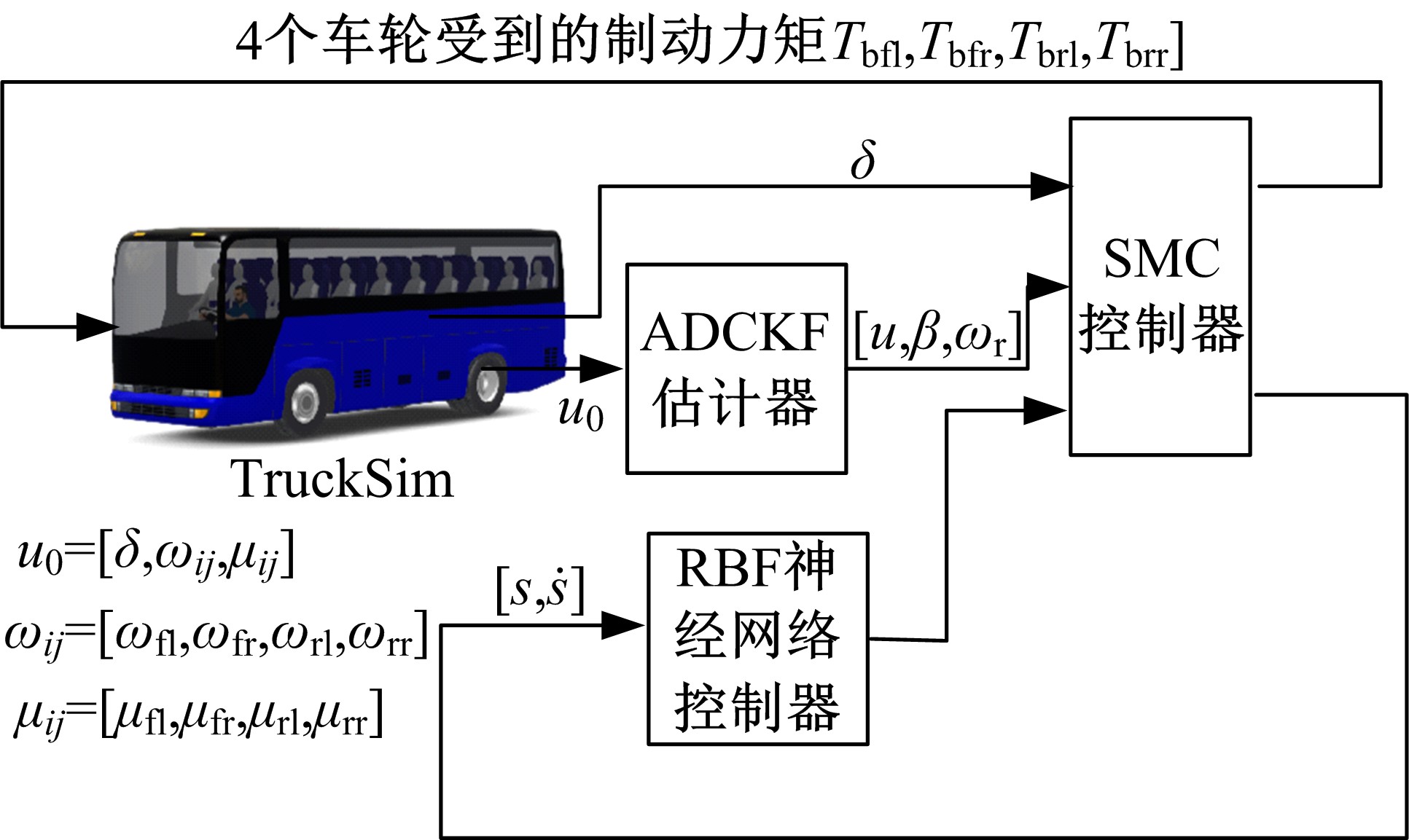
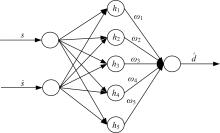
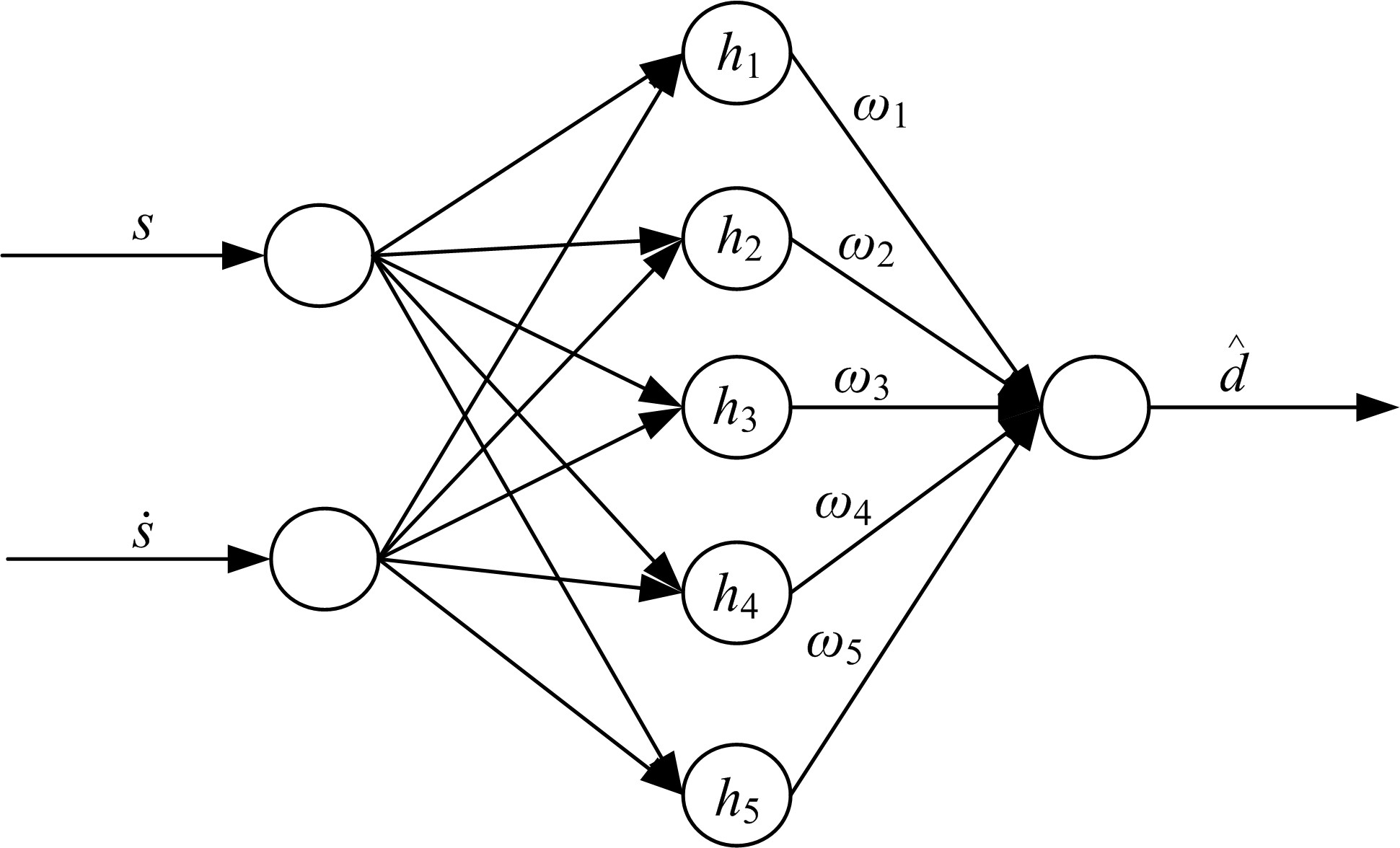
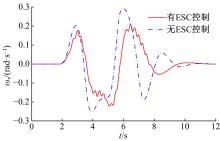
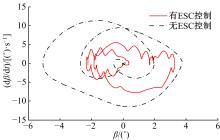
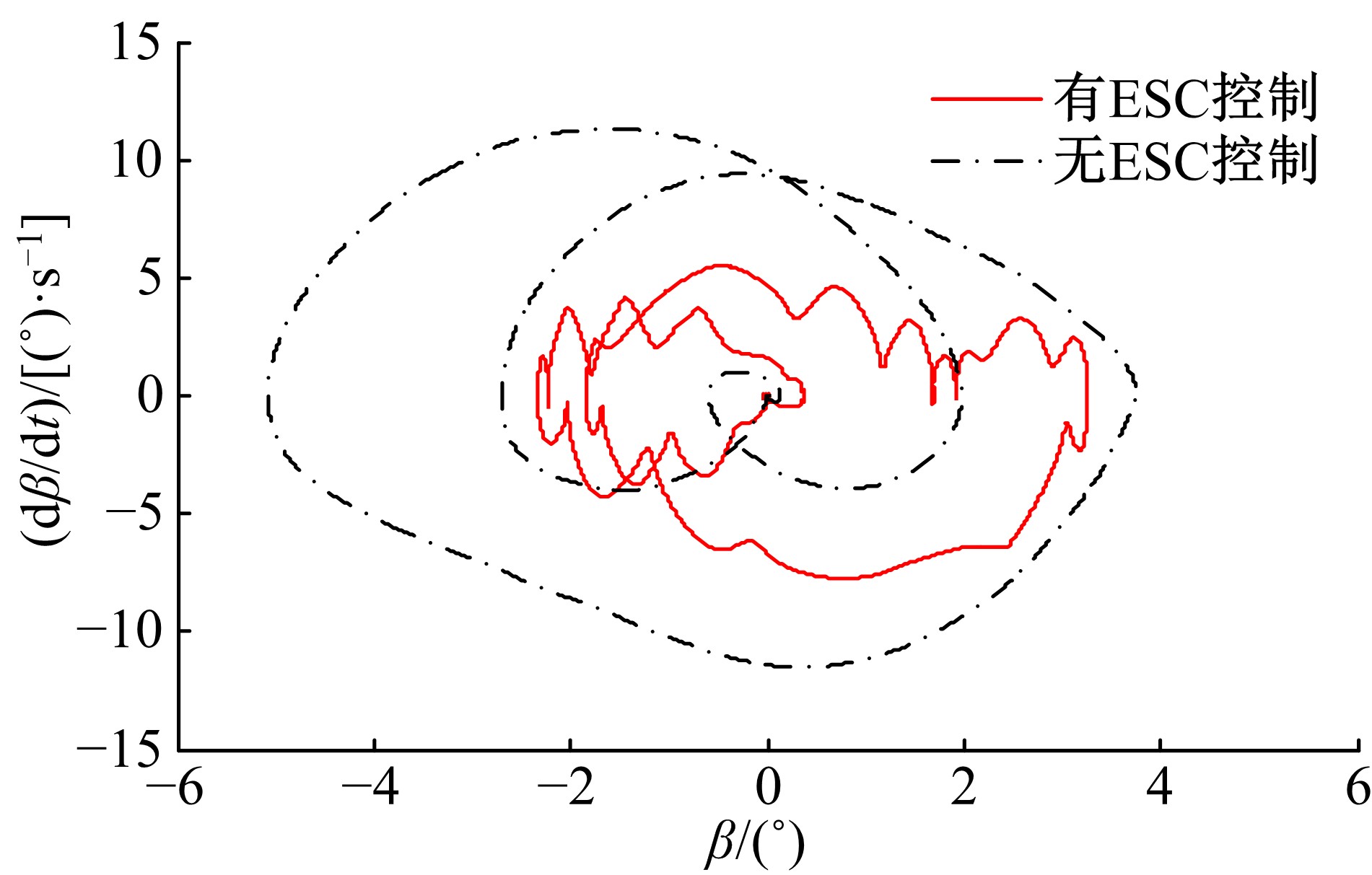
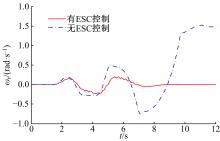
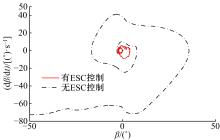
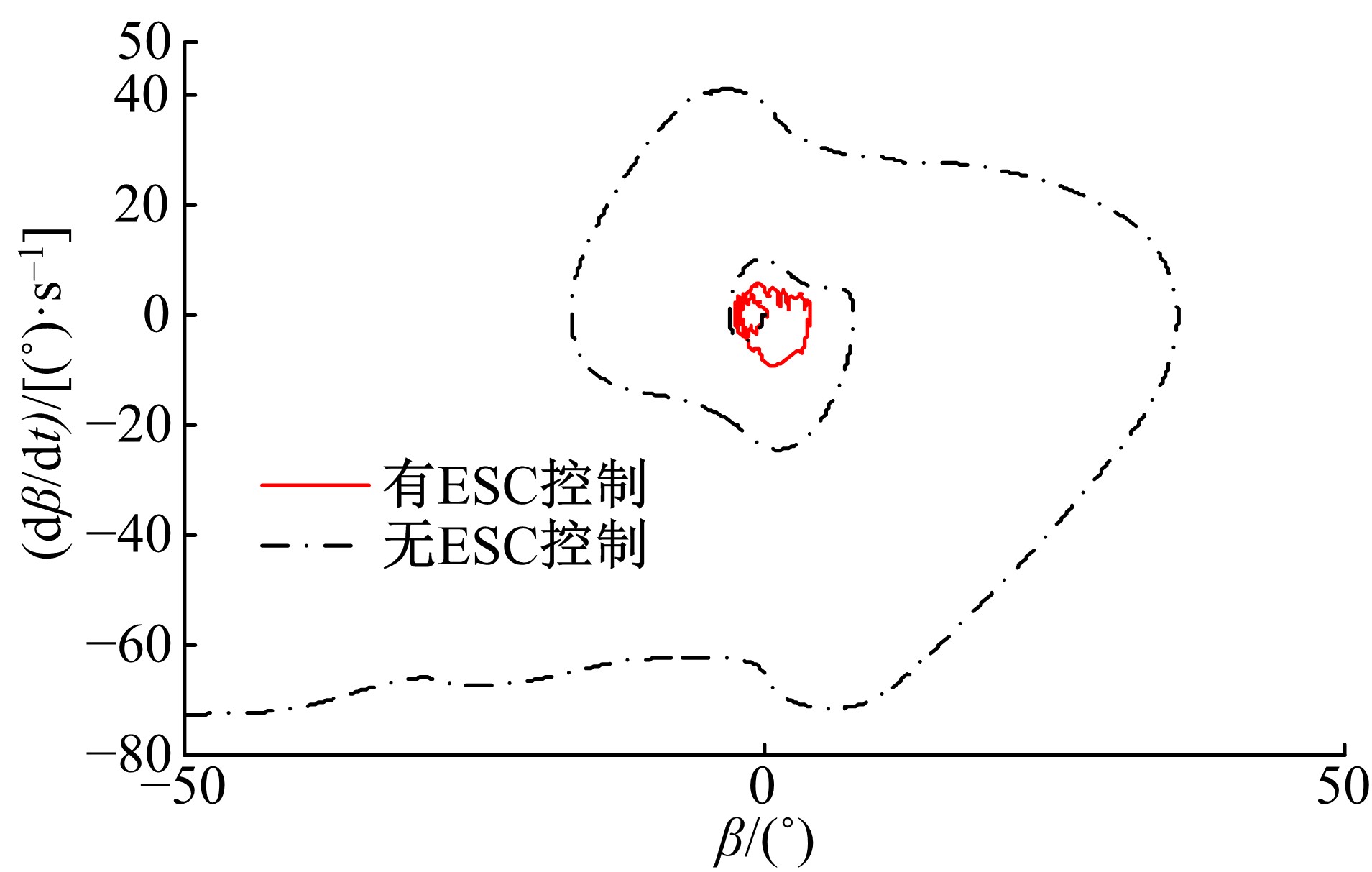
针对商用车电子稳定性控制系统(ESC)中纵向车速、侧向车速、质心侧偏角等部分车辆状态参数难以直接获得、车辆系统传感器过程噪声一般为时变且未知等问题,提出了自适应容积卡尔曼滤波(ADCKF)算法,将标准容积卡尔曼滤波(CKF)算法与次优Sage-Husa噪声估计算法结合在一起,对部分车辆状态参数进行实时在线估计;然后根据商用车ESC的控制需求,并考虑建模不确定性和外界扰动,提出了商用车ESC径向基(RBF)神经网络滑模控制算法,利用径向基神经网络对干扰项进行估计。最后,通过MATLAB/Simulink与TruckSim联合仿真,对上述算法进行仿真验证。仿真结果表明:ADCKF算法对商用车的车辆部分状态参数估计较为精确,基于车辆状态估计的商用车ESC神经网络滑模算法控制效果良好,能满足商用车ESC控制需求。
中图分类号:
- U461.6





| 1 | Antonov S, Fehn A, Kugi A. Unscented Kalman filter for vehicle state estimation[J]. Vehicle System Dynamics, 2011, 49(9): 1497-1520. |
| 2 | Reif K, Renner K, Saeger M. Using the unscented Kalman filter and a non-linear two-track model for vehicle state estimation[J]. Ifac Proceedings Volumes, 2008, 41(2): 8570-8575. |
| 3 | 宋传学, 肖峰, 刘思含, 等. 基于无迹卡尔曼滤波的轮毂电机驱动车辆状态观测[J]. 吉林大学学报: 工学版, 2016, 46(2): 333-339. |
| Song Chuan-xue, Xiao Feng, Liu Si-han, et al. State estimation of electric vehicle with in-wheel motors based on UKF[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(2): 333-339. | |
| 4 | 田彦涛, 张宇, 王晓玉, 等. 基于平方根无迹卡尔曼滤波算法的电动汽车质心侧偏角估计[J]. 吉林大学学报: 工学版, 2018, 48(5): 845-852. |
| Tian Yan-tao, Zhang Yu, Wang Xiao-yu, et al. Estimation of side-slip angle of electric vehicle based on square-root unscented Kalman fliter algorithm[J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 845-852. | |
| 5 | 张家旭, 李静. 采用自适应无迹卡尔曼滤波器的车速和路面附着系数估计[J]. 西安交通大学学报, 2016, 50(3): 68-75. |
| Zhang Jia-xu, Li Jing. Estimation of vehicle speed and tire-road adhesion coefficient by adaptive unscented Kalman filter[J]. Journal of Xi’an Jiaotong University, 2016, 50(3): 68-75. | |
| 6 | 金贤建, 殷国栋, 陈南, 等. 分布式驱动电动汽车的平方根容积卡尔曼滤波状态观测[J]. 东南大学学报: 自然科学版, 2016, 46(5): 992-996. |
| Jin Xian-jian, Yin Guo-dong, Chen Nan, et al. State observation of distributed drive electric vehicle using square root cubature Kalman filter[J]. Journal of Southeast University(Natural Science Edition), 2016, 46(5): 992-996. | |
| 7 | 李静, 石求军, 刘鹏, 等. 基于纵向车速估算的商用车ABS神经网络滑模控制[J]. 吉林大学学报: 工学版, 2019, 49(4): 1017-1025. |
| Li Jing, Shi Qiu-jun, Liu Peng, et al. Neural network sliding mode control of commercial vehicle ABS based on longitudinal vehicle speed estimation[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1017-1025. | |
| 8 | 张召友, 郝燕玲, 吴旭. 3种确定性采样非线性滤波算法的复杂度分析[J]. 哈尔滨工业大学学报, 2013, 45(12): 111-115. |
| Zhang Zhao-you, Hao Yan-ling, Wu Xu. Complexity analysis of three deterministic sampling nonlinear filtering algorithms[J]. Journal of Harbin Institute of Technology, 2013, 45(12): 111-115. | |
| 9 | 唐李军. Cubature卡尔曼滤波及其在导航中的应用研究[D]. 哈尔滨: 哈尔滨工程大学自动化学院, 2012. |
| Tang Li-jun. Cubature Kalman filter and application research on navigation[D]. Harbin: College of Automation, Harbin Engineering University, 2012. | |
| 10 | 金辉, 李世杰. 基于极限车速的车辆稳定性控制研究[J]. 汽车工程, 2018, 40(1): 48-56. |
| Jin Hui, Li Shi-jie. A research on vehicle stability control based on limited speed[J]. Automotive Engineering, 2018, 40(1): 48-56. | |
| 11 | 李寿涛, 马用学, 郭鹏程, 等. 一种变逻辑门限值的车辆稳定性控制策略研究[J]. 汽车工程, 2015, 37(7): 782-787. |
| Li Shou-tao, Ma Yong-xue, Guo Peng-cheng, et al. A study on vehicle stability control strategy with variable threshold[J]. Automotive Engineering, 2015, 37(7): 782-787. | |
| 12 | Chen Y H, Hedrick J K, Guo K H. A novel direct yaw moment controller for in-wheel motor electric vehicles[J]. Vehicle System Dynamics, 2013, 51(6): 925-942. |
| 13 | 周磊, 张向文. 基于Dugoff轮胎模型的爆胎车辆运动学仿真[J]. 计算机仿真, 2012, 29(6): 308-311. |
| Zhou Lei, Zhang Xiang-wen. Simulation of vehicle dynamics in tire blow-out process based on Dugoff tire model[J]. Computer Simulation, 2012, 29(6): 308-311. | |
| 14 | 张汉国, 张洪钺. 阻止自适应Kalman滤波发散的补救方法[J]. 控制与决策, 1991, 6(1): 53-56. |
| Zhang Han-guo, Zhang Hong-yue. Remedy to prevent adaptive Kalman filter divergence[J]. Control and Decision, 1991, 6(1): 53-56. | |
| 15 | Ding S H, Liu L, Zhang W X. Sliding mode direct yaw-moment control design for in-wheel electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6752-6762. |
| 16 | 刘金坤. 滑模变结构控制MATLAB仿真(第3版)基本理论与设计方法[M]. 北京: 清华大学出版社, 2015. |
| [1] | 赖晨光,王擎宇,胡博,文凯平,陈彦宇. 静气动弹性影响下带小翼汽车尾翼的设计与优化[J]. 吉林大学学报(工学版), 2020, 50(2): 399-407. |
| [2] | 叶辉,刘畅,闫康康. 纤维增强复合材料在汽车覆盖件中的应用[J]. 吉林大学学报(工学版), 2020, 50(2): 417-425. |
| [3] | 欧阳丹彤,马骢,雷景佩,冯莎莎. 知识图谱嵌入中的自适应筛选[J]. 吉林大学学报(工学版), 2020, 50(2): 685-691. |
| [4] | 李银平,靳添絮,刘立. 纯电动铲运机弓网续能系统设计与动态特性仿真[J]. 吉林大学学报(工学版), 2020, 50(2): 454-463. |
| [5] | 陈鑫,王宁,沈传亮,冯晓,杨昌海. 后视镜造型对前侧窗气动噪声的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 426-436. |
| [6] | 马彦,黄健飞,赵海艳. 基于车间通信的车辆编队控制方法设计[J]. 吉林大学学报(工学版), 2020, 50(2): 711-718. |
| [7] | 李小雨,许男,仇韬,郭孔辉. 各向异性刚度对轮胎力学特性及车辆操纵性的影响[J]. 吉林大学学报(工学版), 2020, 50(2): 389-398. |
| [8] | 王伟,赵健廷,胡宽荣,郭永仓. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(2): 464-471. |
| [9] | 史文库,陈龙,张贵辉,陈志勇. 多级刚度双质量飞轮扭转特性建模与试验验证[J]. 吉林大学学报(工学版), 2020, 50(1): 44-52. |
| [10] | 刘富,安毅,董博,李元春. 基于ADP的可重构机械臂能耗保代价分散最优控制[J]. 吉林大学学报(工学版), 2020, 50(1): 342-350. |
| [11] | 郭孔辉,黄世庆,吴海东. 适用于高频激励的面内轮胎动态模型[J]. 吉林大学学报(工学版), 2020, 50(1): 19-28. |
| [12] | 王哲,谢怡,臧鹏飞,王耀. 基于极小值原理的燃料电池客车能量管理策略[J]. 吉林大学学报(工学版), 2020, 50(1): 36-43. |
| [13] | 马芳武,梁鸿宇,赵颖,杨猛,蒲永锋. 内凹三角形负泊松比结构耐撞性多目标优化设计[J]. 吉林大学学报(工学版), 2020, 50(1): 29-35. |
| [14] | 马芳武,倪利伟,吴量,聂家弘,徐广健. 轮腿式全地形移动机器人位姿闭环控制[J]. 吉林大学学报(工学版), 2019, 49(6): 1745-1755. |
| [15] | 靳立强, 田端洋, 田浩, 刘蒙蒙. 汽车电子稳定系统制动增力辅助技术[J]. 吉林大学学报(工学版), 2019, 49(6): 1764-1776. |
|
||