吉林大学学报(工学版) ›› 2022, Vol. 52 ›› Issue (8): 1926-1933.doi: 10.13229/j.cnki.jdxbgxb20210155
• 通信与控制工程 • 上一篇
基于非线性扰动观测器的无人机地面效应补偿
鲜斌1( ),李杰奇1,古训1,2
),李杰奇1,古训1,2
- 1.天津大学 电气自动化与信息工程学院,天津 300072
2.贵阳学院 电子与通信工程学院,贵阳 550005
Ground effects compensation for an unmanned aerial vehicle via nonlinear disturbance observer
Bin XIAN1(),Jie-qi LI1,Xun GU1,2
- 1.School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China
2.School of Electronics and Communication Engineering,Guiyang University,Guiyang 550005,China
摘要:
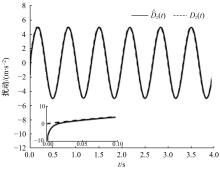
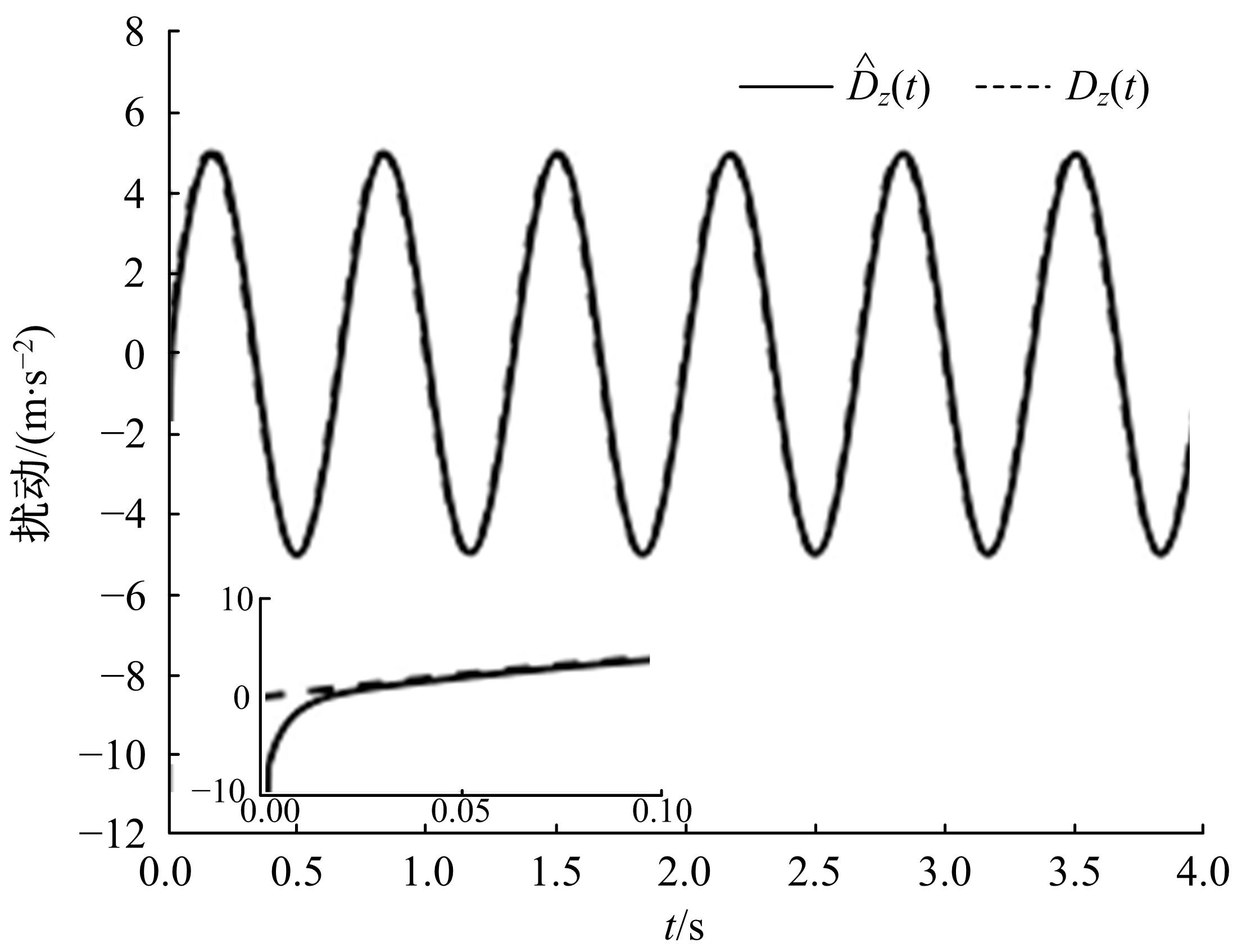
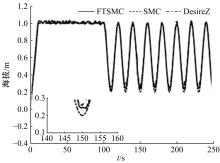
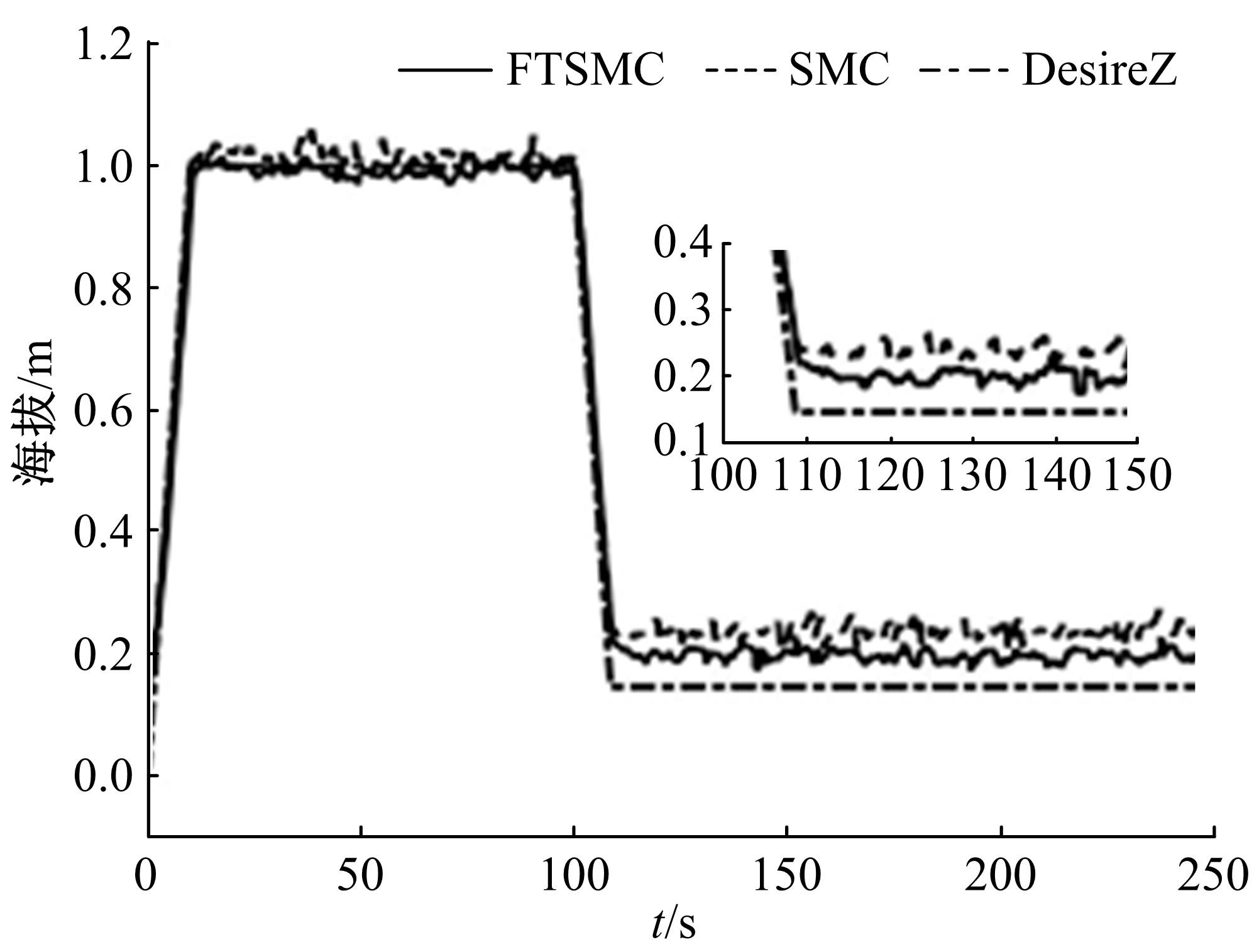
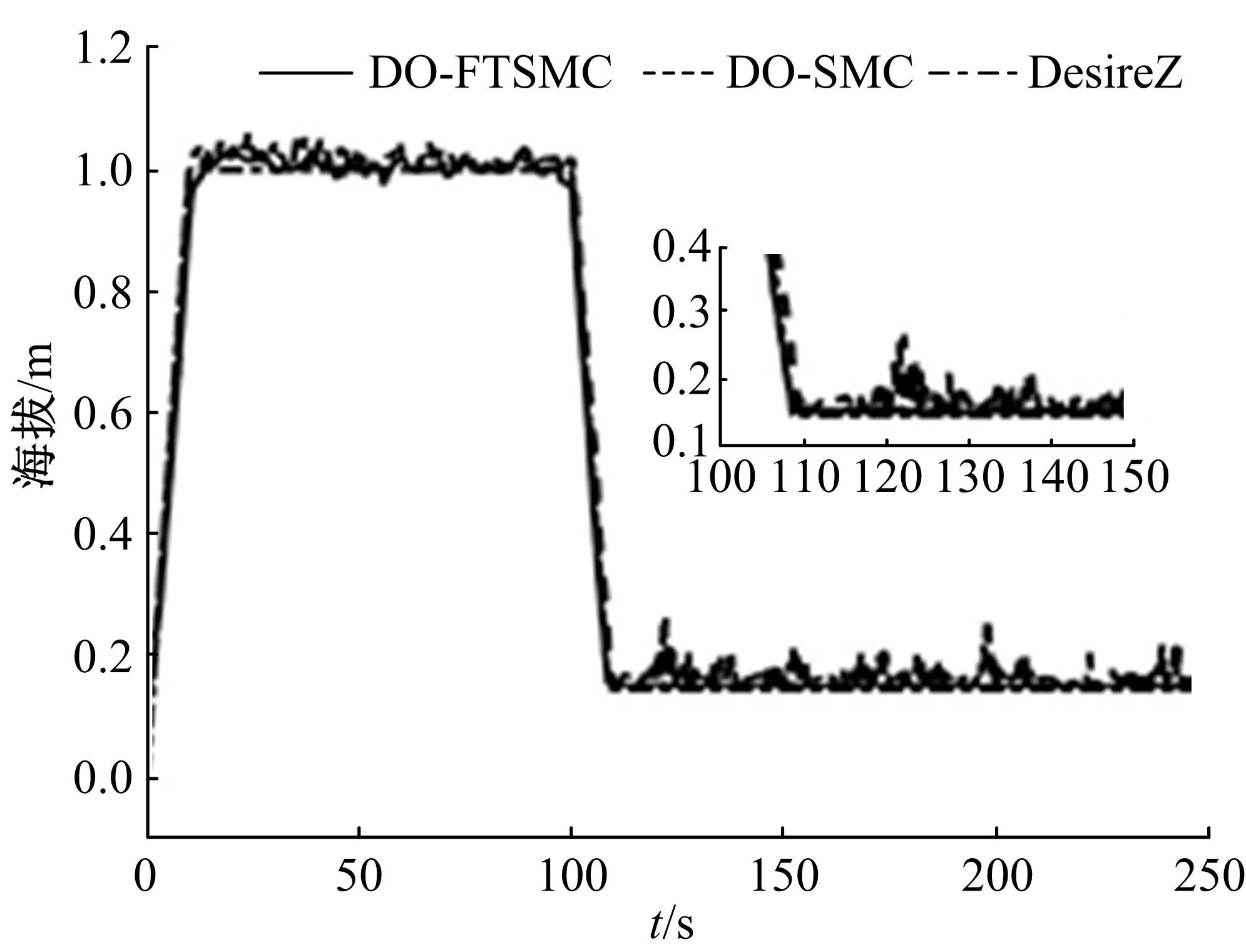
本文针对地面效应对四旋翼无人机在降落过程中控制性能有较大影响的问题,在四旋翼无人机地面效应复杂、难以建立机理模型的限制下,提出一种基于非线性扰动观测器的新型非线性鲁棒控制策略。这种控制策略利用扰动观测器估计和补偿地面效应带来的扰动,采用快速终端滑模控制器提高了无人机位置控制误差的收敛速度,实现了无人机降落过程中的精确控制。通过基于李雅普诺夫分析的方法证明了闭环系统的稳定性,以及观测器估计误差和控制器跟踪误差的有限时间收敛特性。飞行实验效果表明:本文提出的控制补偿策略取得了良好的无人机降落控制效果。
中图分类号:
- TP273




| 1 | 鲜斌, 张诗婧, 韩晓薇, 等. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报: 工学版, 2021, 51(6): 2259-2267. |
| Xian Bin, Zhang Shi-jing, Han Xiao-wei, et al. Trajectory planning for unmanned aerial vehicle slung⁃payload aerial transportation system based on reinforcement learning[J].Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2259-2267. | |
| 2 | 王征宇, 鲜斌. 倾转式三旋翼无人机的有限时间收敛控制设计[J]. 控制理论与应用, 2019, 36(9): 1442-1452. |
| Wang Zheng-yu, Xian Bin. Finite time convergence control design of the tilt tri-rotor unmanned aerial vehicle[J]. Control Theory & Applications, 2019, 36(9): 1442-1452. | |
| 3 | Yi F, Cong Z, Stanley B, et al. Autonomous landing of a UAV on a moving platform using model predictive control[J]. Drones, 2018, 2(4): 2040034. |
| 4 | 韩晓薇, 鲜斌, 杨森. 无人机吊挂空运系统的自适应控制设计[J]. 控制理论与应用, 2020, 37(5): 999-1006. |
| Han Xiao-wei, Xian Bin, Yang Sen. Adaptive controller design for an unmanned quadrotor transportation system[J]. Control Theory & Applications, 2020, 37(5): 999-1006. | |
| 5 | 张勇, 陈增强, 张兴会, 等. 基于自抗扰的四旋翼无人机动态面姿态控制[J]. 吉林大学学报: 工学版, 2019, 49(2): 562-569. |
| Zhang Yong, Cheng Zeng-qiang, Zhang Xing-hui, et al. Dynamic surface attitude xontrol of quad-rotor UVA based on ADRC[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(2): 562-569. | |
| 6 | 李正平, 鲜斌. 基于虚拟结构法的分布式多无人机鲁棒编队控制[J]. 控制理论与应用, 2020, 37(11): 2423-2431. |
| Li Zheng-ping, Xian Bin. Robust distributed formation control of multiple unmanned aerial vehicles based on virtual structure[J]. Control Theory & Applications, 2020, 37(11): 2423-2431. | |
| 7 | Kan Y X, Justin T, Teng H Z, et al. Analysis of ground effect for small-scale UAVs in forward flight[J]. IEEE Robotics and Automation Letters, 2019, 4(4): 3860-3867. |
| 8 | Matus-Vargas A, Rodríguez-Gómez G, Martínez-Carranza J. Aerodynamic disturbance rejection acting on a quadcopter near ground[C]∥Proc of 2019 6th International Conference on Control, Decision and Information Technologies(CoDIT), Paris, France, 2019: 1516-1521. |
| 9 | Lee L, Nguyen A T, Xuan-Mung N, et al. Quadrotor trajectory tracking control against uncertainties for autonomous landing task[C]∥Proc of 2019 19th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea (South), 2019: 55-60. |
| 10 | Nathan N D, Green R B. The flow around a model helicopter main rotor in ground effect[J]. Experiments in Fluids, 2012, 52(1): 151-166. |
| 11 | Li D J, Zhou Y, Shi Z Y, et al. Autonomous landing of quadrotor based on ground effect modelling[C]∥Proc of 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 2015: 5647-5652. |
| 12 | Shi G Y, Shi X C, Michael O'Connell, et al. Neural lander: stable drone landing control using learned dynamics[C]∥Proc of 2019 IEEE International Conference on Robotics and Automation(ICRA), Montreal, QC, Canada, 2019: 9784-9790. |
| 13 | Lee D, Ryan T, Jin H. Autonomous landing of a VTOL UAV on a moving platform using image-based visual servoing[C]∥Proc of 2012 IEEE International Conference on Robotics and Automation(ICRA), St Paul, USA, 2012: 971-976. |
| 14 | Filiberto M, González-Hernández I, Sergio S, et al. Second order sliding mode controllers for altitude control of a quadrotor UAS: real-time implementation in outdoor environments[J]. Neurocomputing, 2017, 233: 61-71. |
| 15 | Man Z H, Yu X H. Terminal sliding mode control of MIMO linear systems[J]. IEEE Transactions on Circuits and Systems, 1997, 44(11): 1065-1070. |
| 16 | Yu X H, Man Z H. Fast terminal sliding mode control design for nonlinear dynamical systems[J]. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 2002, 49(2): 261-264. |
| 17 | Yong F, Yu X H, Man Z H. Nonsingular terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38(12): 2159-2167. |
| [1] | 曲优,李文辉. 基于锚框变换的单阶段旋转目标检测方法[J]. 吉林大学学报(工学版), 2022, 52(1): 162-173. |
| [2] | 鲜斌,张诗婧,韩晓薇,蔡佳明,王岭. 基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报(工学版), 2021, 51(6): 2259-2267. |
| [3] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [4] | 王伟,赵健廷,胡宽荣,郭永仓. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(2): 464-471. |
| [5] | 高锐涛,单建,杨洲,文晟,兰玉彬,张泉勇,汪洋. 植保无人机变量喷雾处方图实时解译系统的设计与试验[J]. 吉林大学学报(工学版), 2020, 50(1): 361-374. |
| [6] | 陈鑫,阮新建,李铭,王宁,王佳宁,潘凯旋. 基于大涡模拟的离散格式改进方法及应用[J]. 吉林大学学报(工学版), 2019, 49(6): 1756-1763. |
| [7] | 吴蔚楠,崔乃刚,郭继峰,赵杨杨. 多异构无人机任务规划的分布式一体化求解方法[J]. 吉林大学学报(工学版), 2018, 48(6): 1827-1837. |
| [8] | 王宏朝, 单希壮, 杨志刚. 地面效应模拟对环境风洞中车辆冷却系统试验影响的数值模拟[J]. 吉林大学学报(工学版), 2017, 47(5): 1373-1378. |
| [9] | 陈强, 许洪国, 谭立东. 基于小型无人机摄影测量的交通事故现场勘查[J]. 吉林大学学报(工学版), 2016, 46(5): 1439-1446. |
| [10] | 熊海良,孙德春,田红心,杨宏,易克初. 无人机上行链路数据传输方案[J]. 吉林大学学报(工学版), 2010, 40(01): 276-0280. |
| [11] | 陈谋,肖健,姜长生 . 基于改进蚁群算法的无人机三维航路规划[J]. 吉林大学学报(工学版), 2008, 38(04): 991-995. |
| [12] | 傅立敏, 扶原放. 轿车地面效应的数值模拟[J]. 吉林大学学报(工学版), 2003, (2): 11-14. |
|
||