吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (1): 361-374.doi: 10.13229/j.cnki.jdxbgxb20180739
• 农业工程·仿生工程 • 上一篇
植保无人机变量喷雾处方图实时解译系统的设计与试验
高锐涛1( ),单建1,杨洲1(),文晟2,兰玉彬1,2,张泉勇1,2,汪洋1
),单建1,杨洲1(),文晟2,兰玉彬1,2,张泉勇1,2,汪洋1
- 1. 华南农业大学 工程学院,广州 510642
2. 国家精准农业航空施药技术国际联合中心,广州 510642
Real⁃time interpretation system of variable spray prescription map based on plant protection UAV
Rui-tao GAO1(),Jian SHAN1,Zhou YANG1(),Sheng WEN2,Yu-bin LAN1,2,Quan-yong ZHANG1,2,Yang WANG1
- 1. College of Engineering, South China Agricultural University, Guangzhou 510642, China
2. National Center for International Collaboration Research on Precision Agriculture Aviation Pesticides Spraying Technology, Guangzhou 510642, China
摘要:
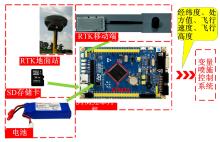
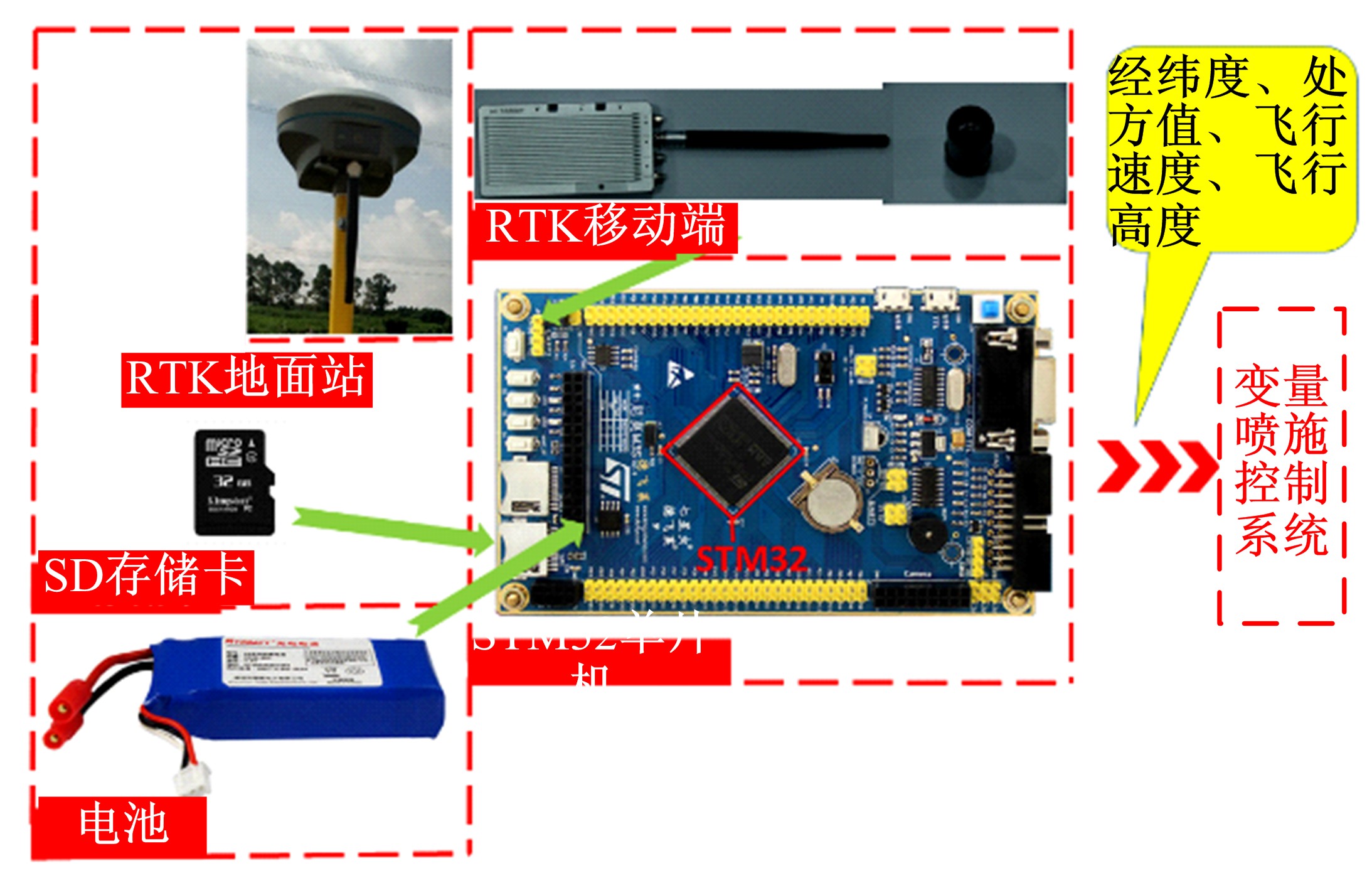
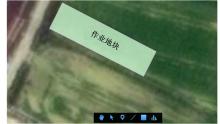
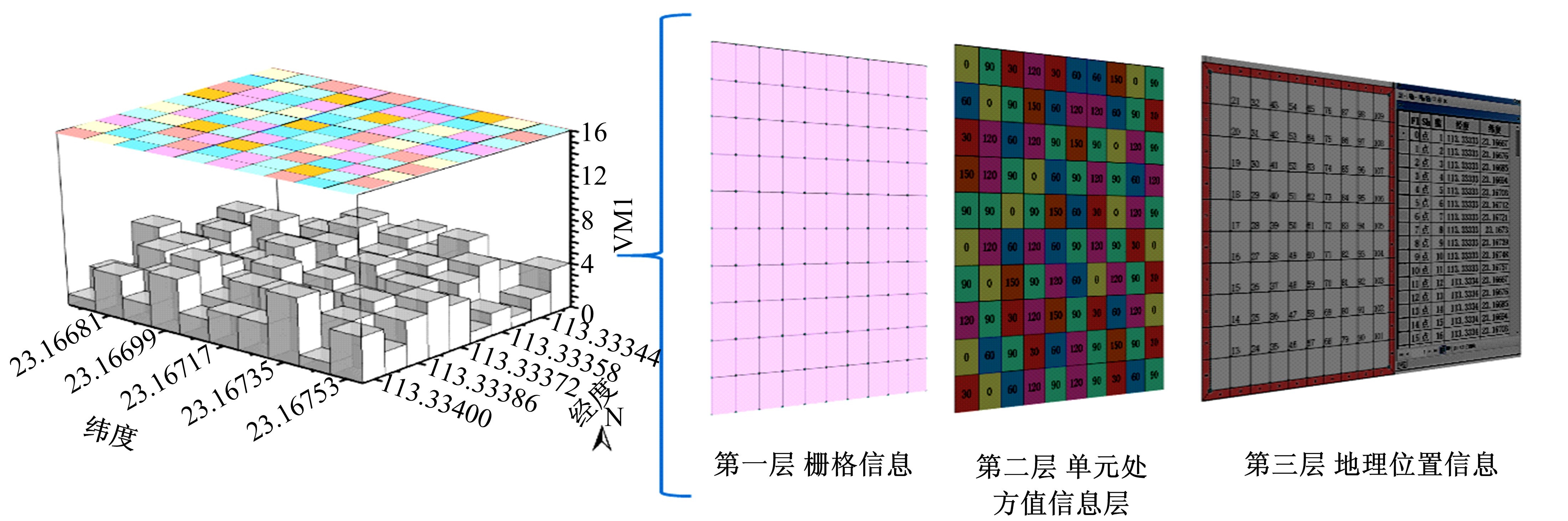
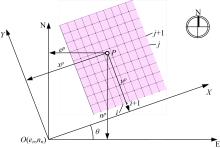
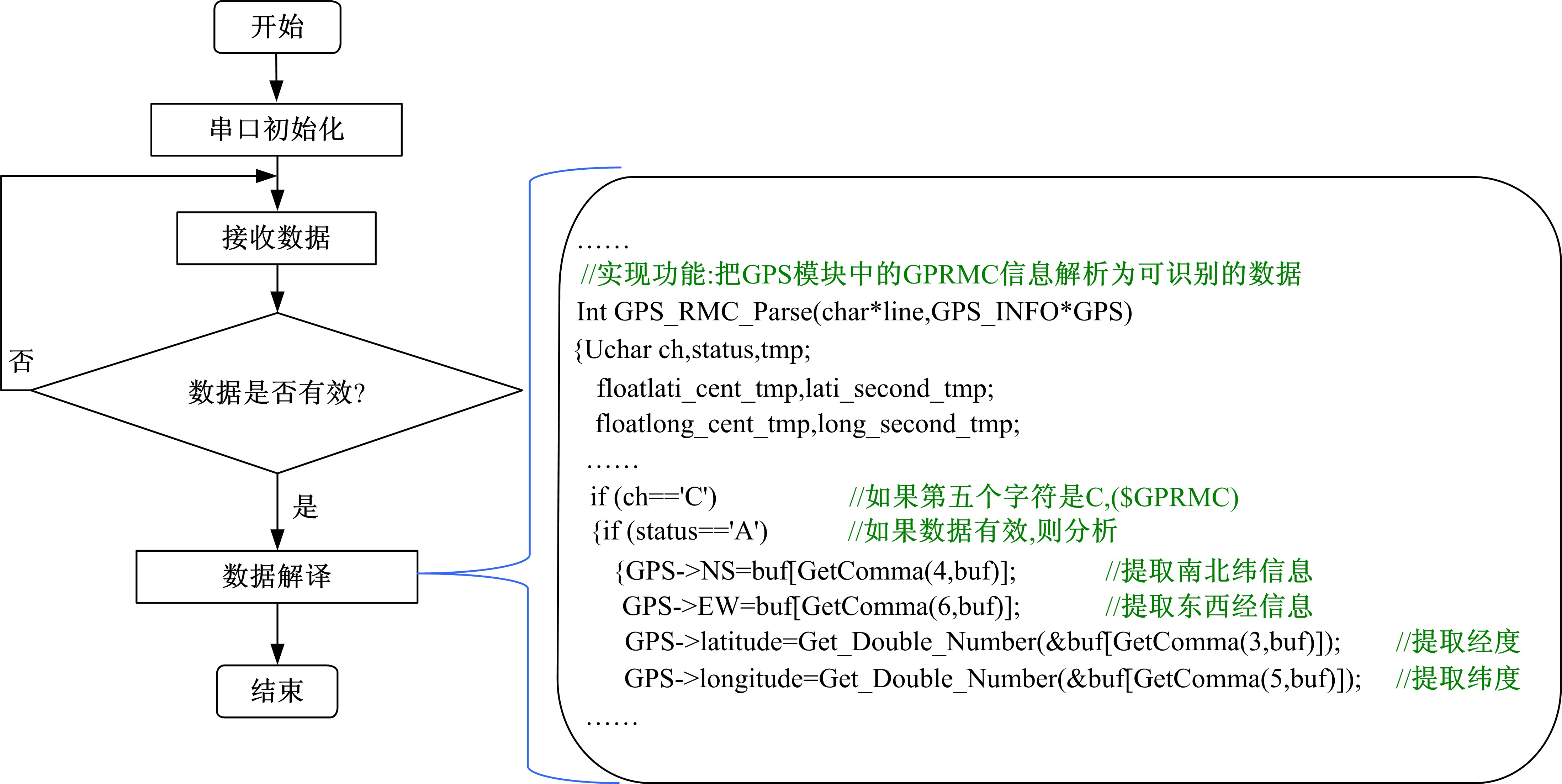
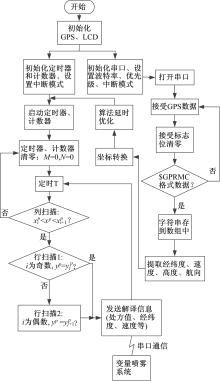
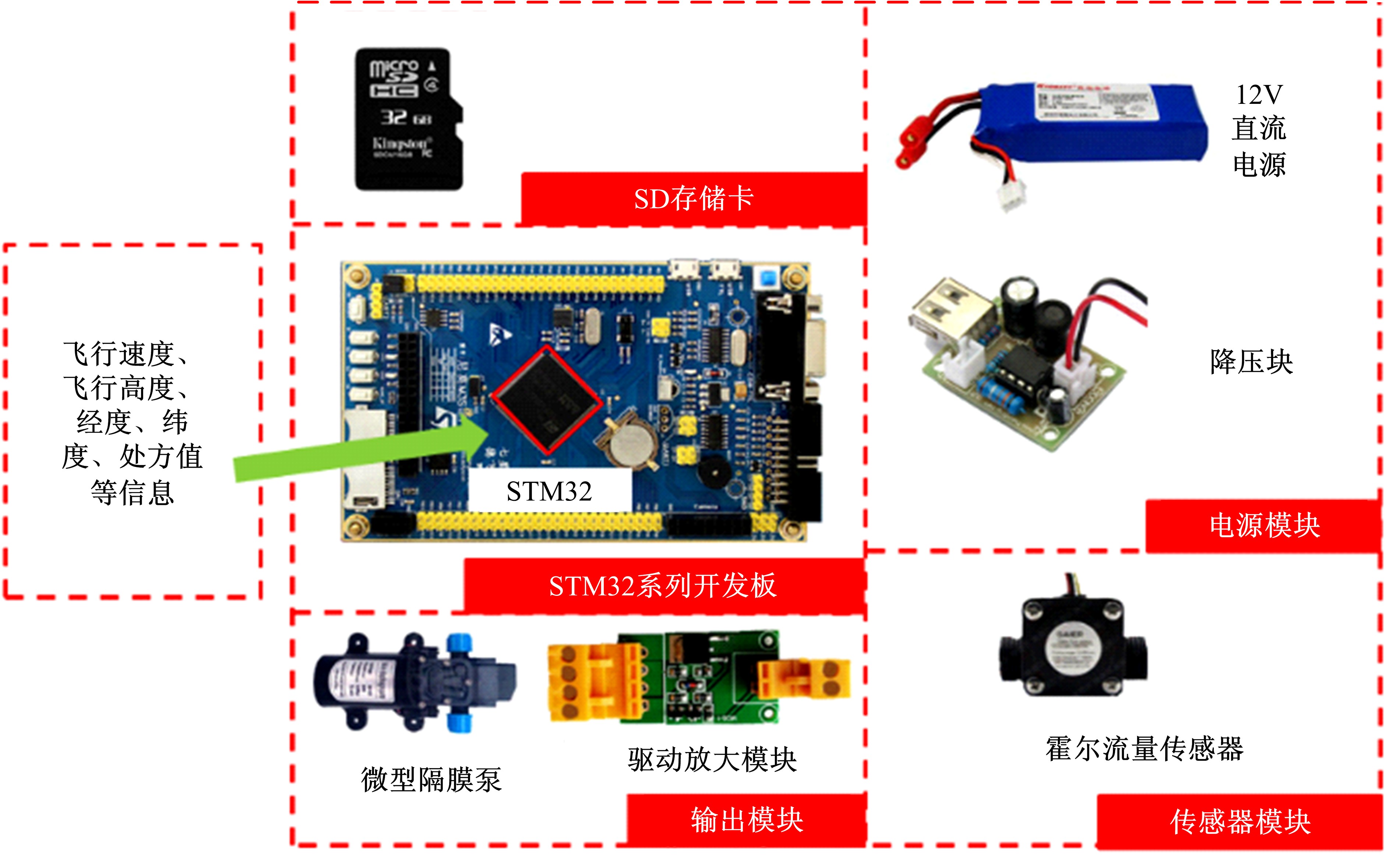
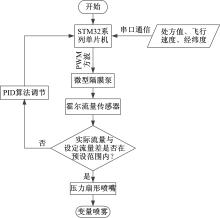
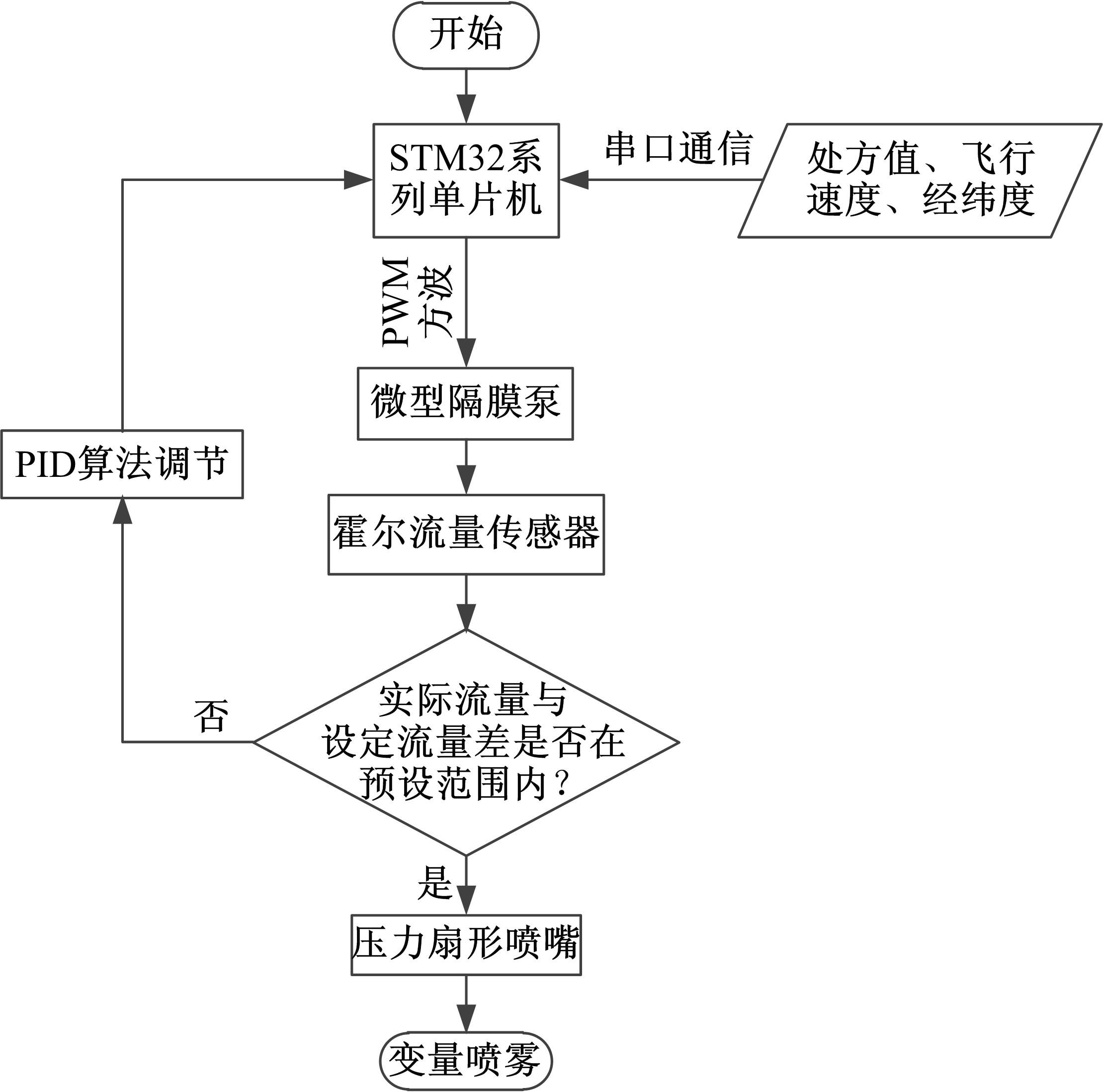
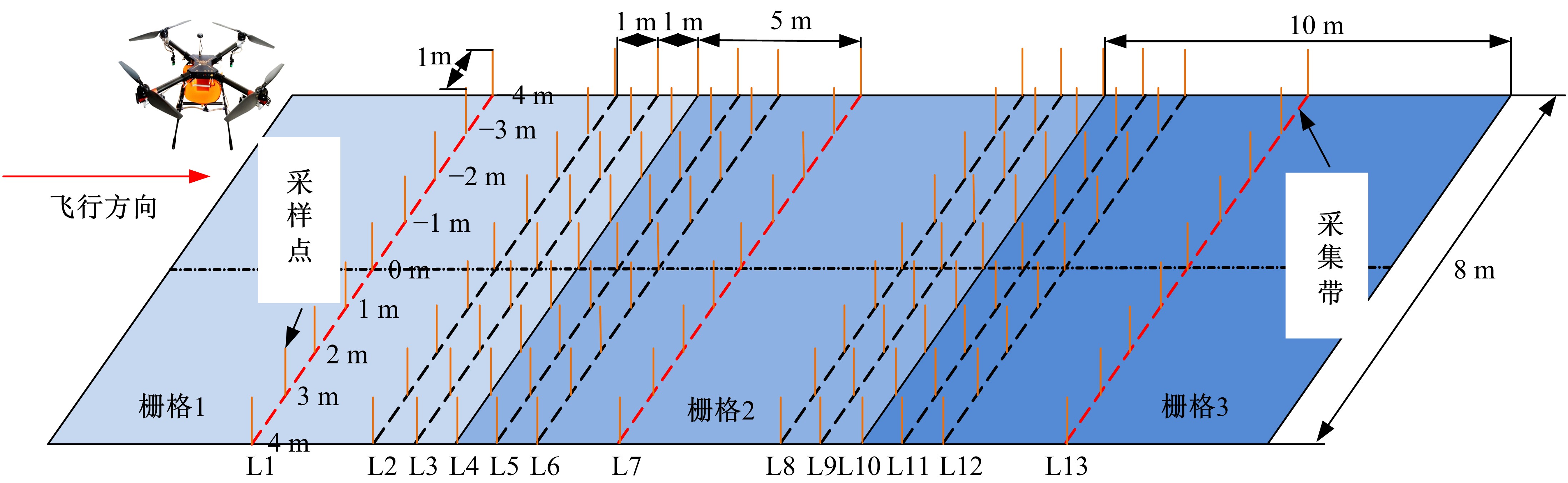
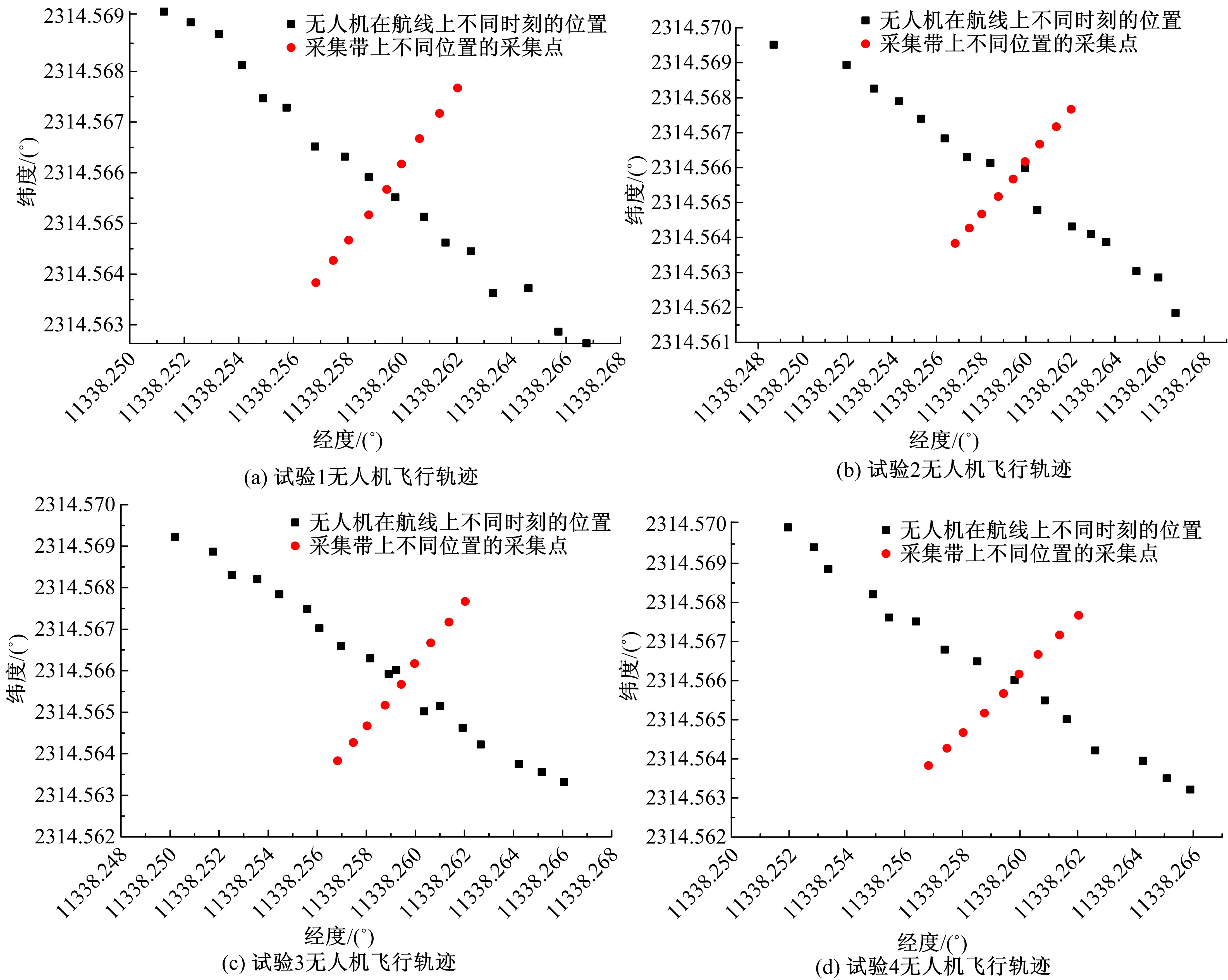
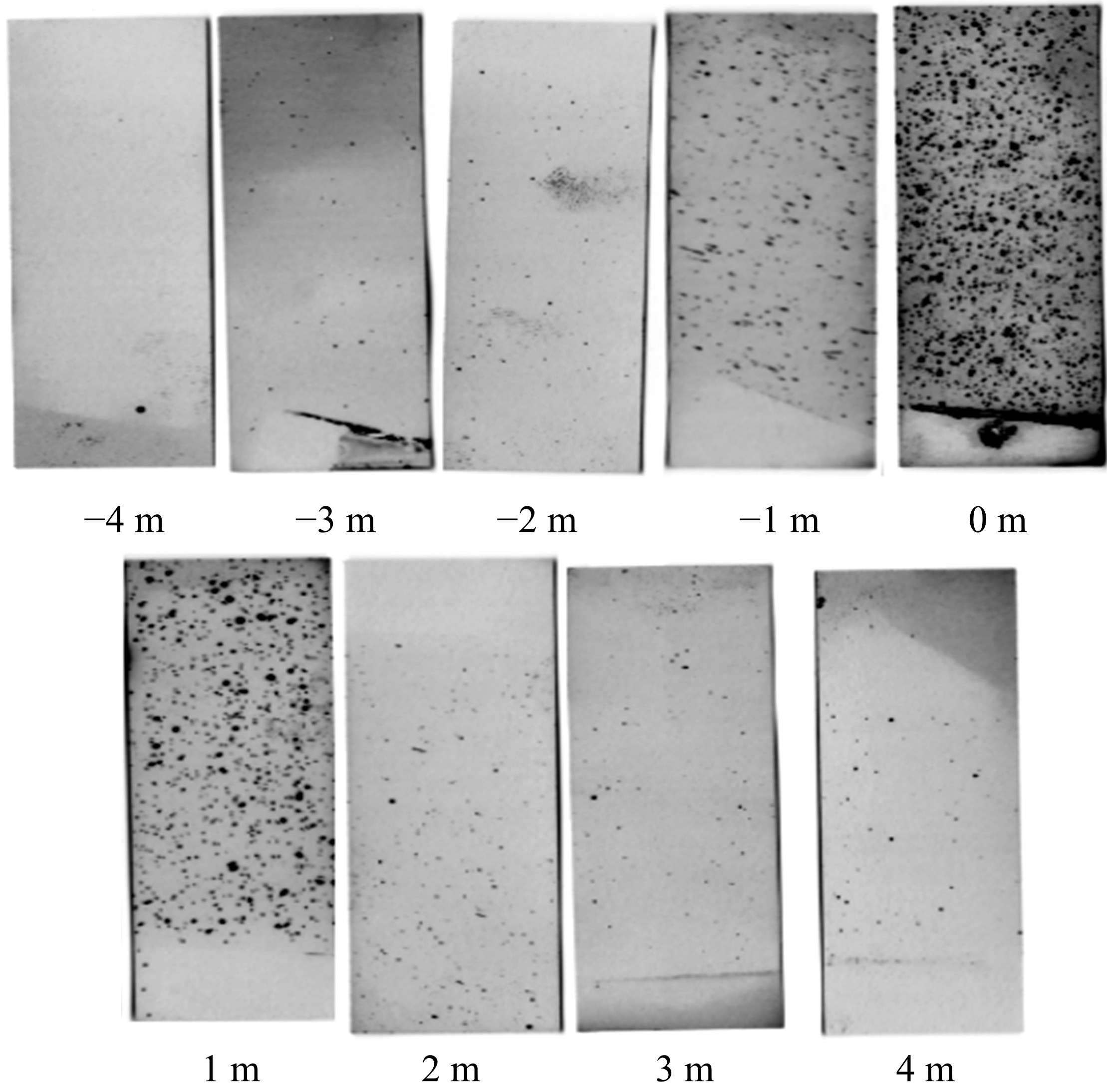
研制了基于ARM架构的变量喷雾处方图实时解译系统,此系统可以实时提取无人机作业位置、速度、高度等参数,并在处方图中进行寻址从而读取对应的栅格处方值发送至变量喷雾系统。寻址采用了延时算法优化设计,使解译结果满足作业需求。解译系统与变量系统搭建在大疆MG-1植保无人机上,通过试验测试解译系统的可实施性与精确性。试验结果表明,此系统可成功实时解译变量施药处方图,在有效喷幅内,栅格中心与栅格边界变量结果显著,与预设处方值相符,采集带雾滴沉积量为0.005~0.765 8 μL/cm2,雾滴覆盖密度为12~72个/cm2,变量转换时间约为0.5 s,变量精度为1 m。
中图分类号:
- S25

















| 1 | 赵啸宇, 翟恩昱, 赵德天, 等. 面向设施农业的背负式喷杆喷雾机结构改进与性能试验[J]. 中国农机化学报, 2017, 38(11): 43-47. |
| Zhao Xiao-yu, Zhai En-yu, Zhao De-tian, et al. Structural improvement and performance test of knapsack sprayer for facility agriculture[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(11): 43-47. | |
| 2 | Al-Gaadi K A, Ayers P D. Integrating GIS and GPS into a spatially-variable-rate herbicide application system[J]. Applied Engineering in Agriculture, 1999, 15(4): 255-262. |
| 3 | 张东彦, 兰玉彬, 陈立平, 等. 中国农业航空施药技术研究进展与展望[J]. 农业机械学报, 2014, 45(10): 53-59. |
| Zhang Dong-yan, Lan Yu-bin, Chen Li-ping, et al. Current status and future trends of agricultural aerial spraying technology in China[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 53-59. | |
| 4 | Mohammadzamani D, Minaei S, Alimardani R, et al. Variable rate herbicide application using the global positioning system for generating a digital management map[J]. International Journal of Agriculture and Biology, 2009, 11(2): 178-182. |
| 5 | Yang Chen-hai. Integration of aerial imaging and variable-rate technology for site-specific aerial herbicide application[J]. 2017, 60(3): 635-644. |
| 6 | Guan Y, Chen D, He K, et al. Review on research and application of variable rate spray in agriculture[C]∥ IEEE 10th Conference on Industrial Electronics and Applications, New Zealand, 2015: 1575-1580. |
| 7 | 尹东富, 陈树人, 裴文超, 等. 基于处方图的室内变量喷药除草系统设计[J]. 农业工程学报, 2011, 27(4): 131-135. |
| Yin Dong-fu, Chen Shu-ren, Pei Wen-chao, et a1. Design of map-based indoor variable weed spraying system[J]. Transactions of the Chinese Society of Agricultural Engineering,2011, 27(4): 131-135. | |
| 8 | 王玲, 兰玉彬, Hoffmann W C, 等. 微型无人机低空变量喷药系统设计与雾滴沉积规律研究[J]. 农业机械学报, 2016, 47(1): 15-22. |
| Wang Ling, Lan Yu-bin, Hoffmann W C, et al. Design of variable spraying system and influencing factors on droplets deposition of small UAV[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 15-22. | |
| 9 | 陈志刚, 陈梦溪, 魏新华, 等. 基于北斗定位的农田变量处方施药喷雾系统[J]. 排灌机械工程学报, 2015, 33(11): 965-970. |
| Chen Zhi-gang, Chen Meng-xi, Wei Xin-hua, et al. Variable prescription pesticide spraying system for farmland based on the Beidou navigation satellite system[J]. Journal of Drainage and Irrigation Machinery Engineering, 2015, 33(11): 965-970. | |
| 10 | 蒋焕煜, 周鸣川, 李华融, 等. PWM变量喷雾系统动态雾滴分布均匀性实验[J]. 农业机械学报, 2015, 46(3): 73-77. |
| Jiang Huan-yu, Zhou Ming-chuan, Li Hua-rong, et al. Experiment on dynamic droplet distribution uniformity forPWMvariablespray system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 73-77. | |
| 11 | 邱白晶, 闫润, 马靖, 等. 变量喷雾技术研究进展分析[J]. 农业机械学报, 2015, 46(3): 59-72. |
| Qiu Bai-jing, Yan Run, Ma Jing, et al. Research progress analysis of variable rate sprayer technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 59-72. | |
| 12 | 朴丽丽, 陈英义, 申维, 等. 基于ArcGIS Engine的农用地定级决策支持系统[J]. 农业工程学报, 2008, 24(增刊2): 93-96. |
| Li-li Piao, Chen Ying-yi, Shen Wei, et al. Grading decision support system for farmland based on ArcGIS Engine[J]. Transactions of the CSAE, 2008, 24(Sup.2): 93-96. | |
| 13 | 宋宜洛. 精准施肥处方图生成系统研究与实现[D]. 成都: 电子科技大学计算机科学与工程学院, 2013. |
| Song Yi-luo. Variable precision agriculture research and implementation fertilization prescription map generation system[D]. Chengdu: School of Computer Science and Engineering, University of Electronic Science and Technology of China, 2013. | |
| 14 | 周舟, 王秀, 王俊, 等. 基于GIS的变量喷药决策支持系统[J]. 农业工程学报, 2008, 24(增刊2): 123-126. |
| Zhou Zhou, Wang Xiu, Wang Jun, et al. Decision support system for variable-rate spraying based on GIS[J]. Transactions of the Chinese Society of Agricultural Engineering, 2008, 24(Sup.2): 123-126. | |
| 15 | Thorp K R, Tian L F. Performance Study of variable-rate herbicide applications based on remote sensing imagery[J]. Biosystems Engineering, 2004, 88(1): 35-47. |
| 16 | 王利霞, 张书慧, 马成林, 等. 基于ARM 的变量喷药控制系统设计[J]. 农业工程学报, 2010, 26(4): 113-118. |
| Wang Li-xia, Zhang Shu-hui, Ma Cheng-lin, et al. Design of variable spraying system based on ARM[J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(4): 113-118. | |
| 17 | Sökefeld M. Variable Rate Technology for Herbicide Application[M]. Berlin: Springer, 2010: 335-347. |
| 18 | Fulton J P, Shearer S A, Higgins S F, et al. Rate response assessment from various granular VRT applicators[J]. Transactions of the American Society of Agricultural Engineers, 2005, 48(6): 2095-2103. |
| 19 | Yuan D B, Cui X M, Wang G, et al. Research on improving the accuracy of positioning data obtained by GPS module[J]. Key Engineering Materials, 2012, 500: 609-615. |
| 20 | 李冰, 曾连荪. GPS定位信息提取及应用[J]. 电子设计工程, 2012, 20(12): 72-74. |
| Li Bing, Zeng Lian-sun. GPS positioning information extraction and application[J]. Electronic Design Engineering, 2012, 20(12): 72-74. | |
| 21 | 邓巍, 丁为民, 何雄奎. PWM间歇式变量喷雾的雾化特性[J]. 农业机械学报, 2009, 40(1): 74-78. |
| Deng Wei, Ding Wei-min, He Xiong-kui. Spray characteristics of PWM-based intermittent pulse variable spray[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(1): 74-78. | |
| 22 | 邱白晶, 李佐鹏, 吴昊, 等. 变量喷雾装置响应性能的试验研究[J]. 农业工程学报, 2007, 23(11): 148-152. |
| Qiu Bai-jing, Li Zuo-peng, Wu Hao, et al. Experimental study on variable-rate spraying equipment response capability[J]. Transactions of the Chinese Society of Agricultural Engineering, 2007, 23(11): 148-152. | |
| 23 | 陈盛德, 兰玉彬, 李继宇, 等. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J]. 农业工程学报, 2016, 32(17): 40-46. |
| Chen Sheng-de, Lan Yu-bin, Li Ji-yu, et al. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy[J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(17): 40-46. | |
| 24 | 王大帅, 张俊雄, 李伟,等. 植保无人机动态变量施药系统设计与试验[J]. 农业机械学报, 2017, 48(5): 86-93. |
| Wang Da-shuai, Zhang Jun-xiong, Li Wei, et al. Design and test of the dynamic variable spraying system of plant protection UAV[J]. Transactions of the Chinese Society of agricultural Machinery, 2017, 48(5): 86-93. | |
| 25 | 张吉利. 农用航空喷雾系统的试验与研究[J]. 农业技术与装备, 2014(5): 56-59. |
| Zhang Ji-li. Experiment and research on agricultural aerosol spray system[J] Agricultural Technology and Equipment, 2014(5): 56-59. | |
| 26 | 中国民用航空总局运输管理司.中华人民共和国民用航空行业标准:第一部分 农业航空作业质量技术指标:MH/T1002-2016[M]. 北京:中国民用航空局,2016. |
| 27 | 陈盛德, 兰玉彬, 李继宇, 等. 植保无人机航空喷施作业有效喷幅的评定与试验[J]. 农业工程学报, 2017, 33(7): 82-90. |
| Chen Sheng-de, Lan Yu-bin, Li Ji-yu, et al. Evaluation and test of effective spraying width of aerial spraying on plant protection UAV[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(7): 82-90. |
| [1] | 刘恩泽,吴文福. 基于综合指标品质评价算法的单色水果生长状态检测互联网架构[J]. 吉林大学学报(工学版), 2019, 49(6): 2019-2026. |
| [2] | 秦嘉浩,李臻,光岡宗司,井上英二,宋正河,朱忠祥. 基于模型实验的拖拉机配置对稳定性的影响差异[J]. 吉林大学学报(工学版), 2019, 49(4): 1236-1245. |
| [3] | 梁方,尤泳,王德成,王光辉,贺长彬,李帅. 运动参数对草地切根刀具与土壤作用关系的影响[J]. 吉林大学学报(工学版), 2019, 49(3): 903-911. |
| [4] | 吴蔚楠,崔乃刚,郭继峰,赵杨杨. 多异构无人机任务规划的分布式一体化求解方法[J]. 吉林大学学报(工学版), 2018, 48(6): 1827-1837. |
| [5] | 王扬, 王晓梅, 陈泽仁, 于建群. 基于离散元法的玉米籽粒建模[J]. 吉林大学学报(工学版), 2018, 48(5): 1537-1547. |
| [6] | 陈东辉, 吕建华, 龙刚, 张宇晨, 常志勇. 基于ADAMS的半悬挂式农业机组静侧翻稳定性[J]. 吉林大学学报(工学版), 2018, 48(4): 1176-1183. |
| [7] | 贾洪雷, 王万鹏, 陈志, 庄健, 王文君, 刘慧力. 基于土壤坚实度的仿形弹性镇压辊镇压力实时测量方法[J]. 吉林大学学报(工学版), 2018, 48(4): 1169-1175. |
| [8] | 王扬, 吕凤妍, 徐天月, 于建群. 大豆籽粒形状和尺寸分析及其建模[J]. 吉林大学学报(工学版), 2018, 48(2): 507-517. |
| [9] | 贾洪雷, 郑嘉鑫, 袁洪方, 郭明卓, 王文君, 于路路. 大豆播种机双V型筑沟器设计与试验[J]. 吉林大学学报(工学版), 2017, 47(1): 323-331. |
| [10] | 陈强, 许洪国, 谭立东. 基于小型无人机摄影测量的交通事故现场勘查[J]. 吉林大学学报(工学版), 2016, 46(5): 1439-1446. |
| [11] | 肖志锋, 乐建波, 吴南星, 刘相东. 操作压力对过热蒸汽流化床干燥的影响[J]. 吉林大学学报(工学版), 2015, 45(4): 1375-1380. |
| [12] | 张金波,佟金,马云海. 仿生肋条结构表面深松铲刃的磨料磨损特性[J]. 吉林大学学报(工学版), 2015, 45(1): 174-180. |
| [13] | 齐龙, 谭祖庭, 马旭, 陈国锐, 谢俊锋, 邝健霞. 气动振动式匀种装置工作参数的优化及试验[J]. 吉林大学学报(工学版), 2014, 44(6): 1684-1691. |
| [14] | 齐龙, 廖文强, 马旭, 林建衡, 区志行, 詹志勋. 水田小型除草机器人平台控制系统设计与测试[J]. 吉林大学学报(工学版), 2013, 43(04): 991-996. |
| [15] | 翟治芬, 严昌荣, 张建华, 张燕卿, 刘爽. 基于蚁群算法和支持向量机的节水灌溉技术优选[J]. 吉林大学学报(工学版), 2013, 43(04): 997-1003. |
|
||