吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 923-932.doi: 10.13229/j.cnki.jdxbgxb20221166
• 通信与控制工程 • 上一篇
基于方位测量的固定时间多目标定位和环航控制
胡江平1,2( ),周子粲1,陈波1
),周子粲1,陈波1
- 1.电子科技大学 自动化工程学院,成都 611731
2.电子科技大学 长三角研究院(湖州),浙江 湖州 313001
On fixed⁃time multi⁃target localization and circumnavigation control using bearing measurements
Jiang-ping HU1,2(),Zi-can ZHOU1,Bo CHEN1
- 1.School of Automation Engineering,University of Electronic Science and Technology of China,Chengdu 611731,China
2.Yangtze Delta Region Institute (Huzhou),University of Electronic Science and Technology of China,Huzhou 313001,China
摘要:
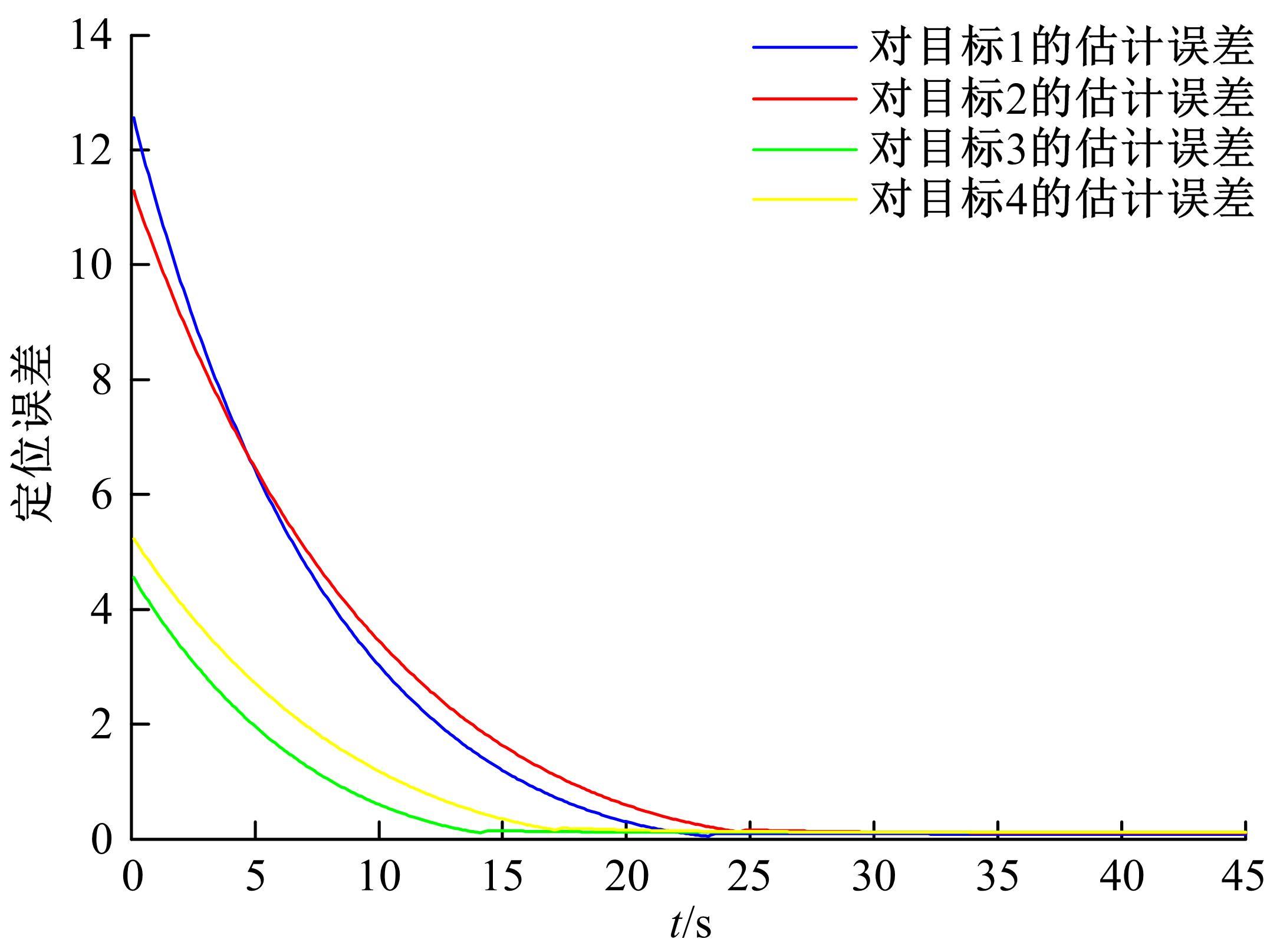
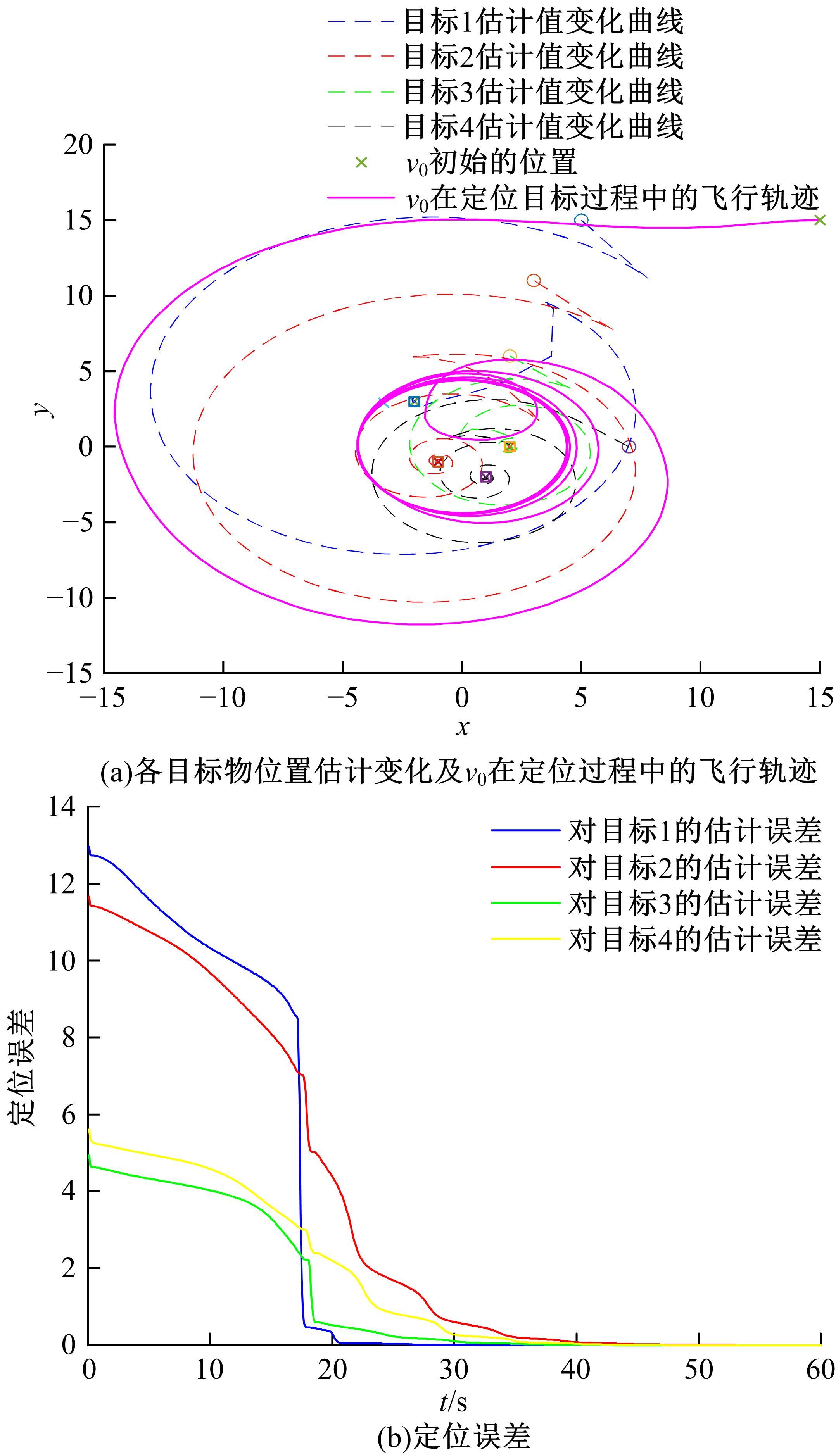
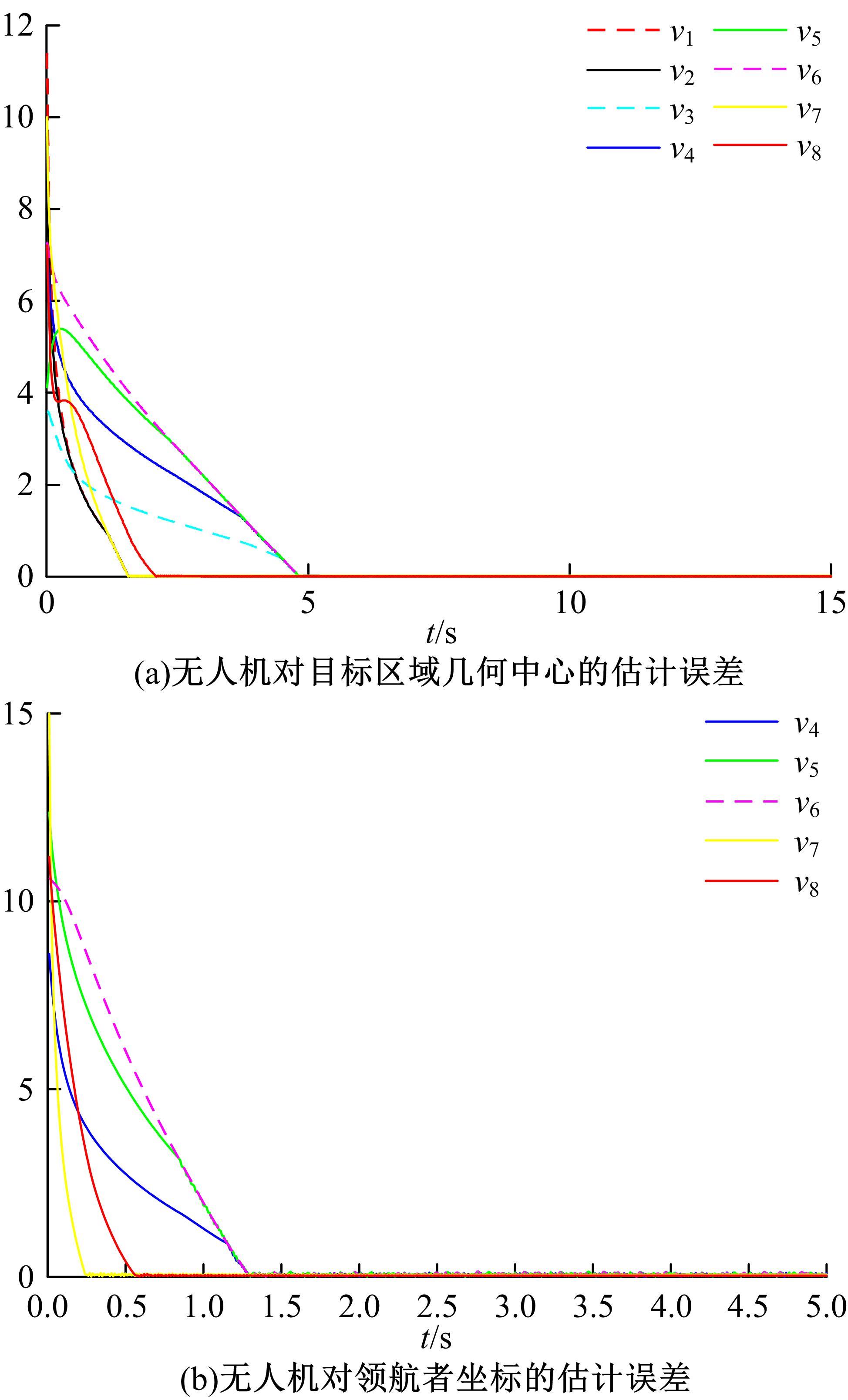
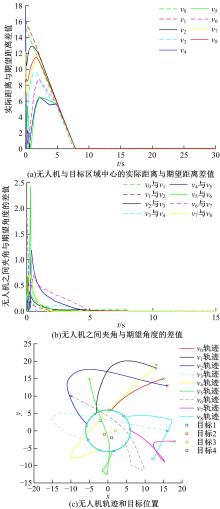
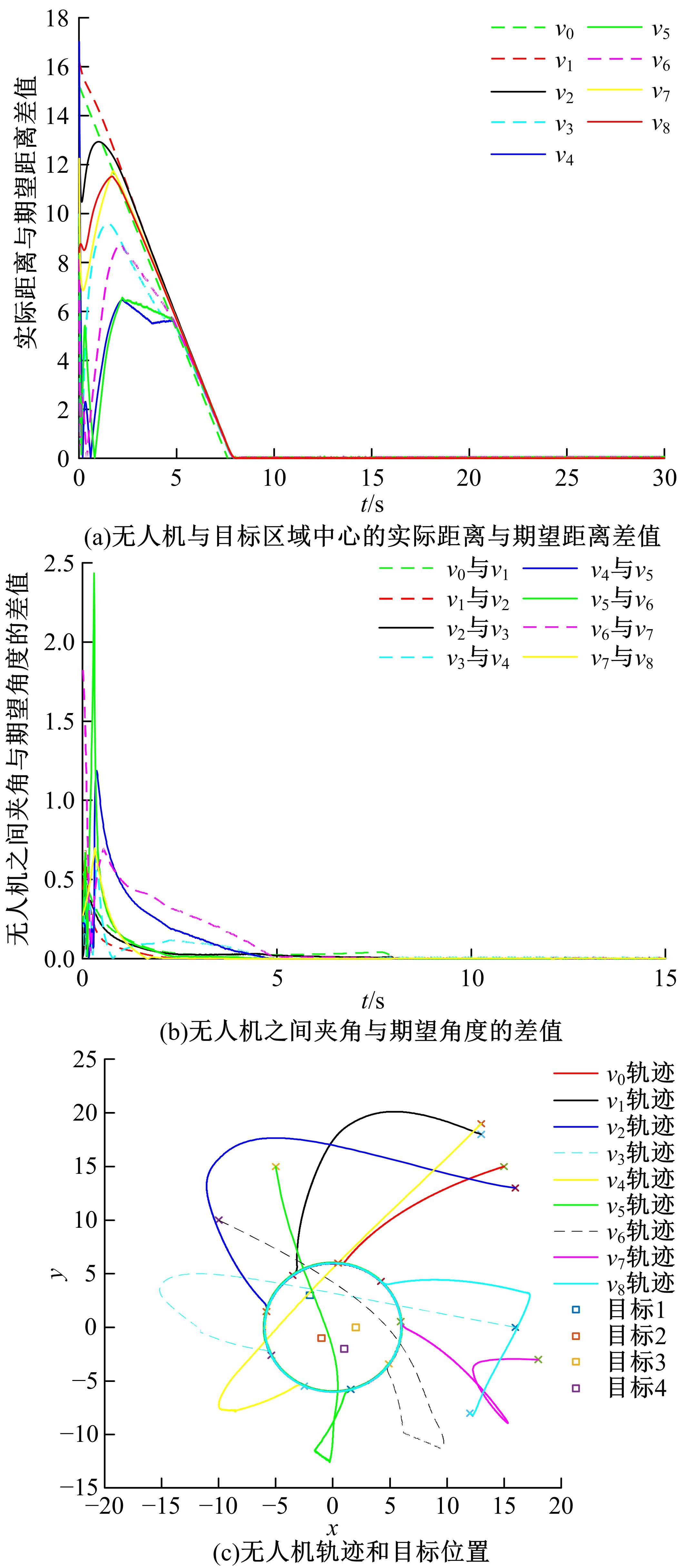
针对多无人机系统对多静态目标的环航控制问题,提出了一种基于方位测量的目标定位和环航控制算法,以确保系统能在固定时间内实现对目标的定位和环航包围。首先,为领航者无人机设计了基于方位测量的目标定位算法以计算目标位置,并为跟随者无人机设计了状态观测器以估计目标中心和领航者位置。然后,对多无人机系统设计了分布式环航控制算法,使多无人机系统实现对多目标物的均匀分布环航。最后,数值仿真实验验证了本文控制算法的有效性。
中图分类号:
- TP13



| 1 | 王祥科,沈林成,李杰,等. 无人机集群控制理论与方法[M]. 上海: 上海交通大学出版社, 2021. |
| 2 | Hu Jiang-ping, Feng Gang.Quantized tracking control for a multi-agent system with high-order leader dynamics[J]. Asian Journal of Control,2011, 13(6): 988-997. |
| 3 | 于雅静,郭健,王荣浩,等. 基于状态观测器的多四旋翼无人机时变编队控制[J/OL]. [2022-09-04]. |
| 4 | Chen Ke, Qi Guo-qing, Li Yin-ya, et al. Target localization and multicircular circumnavigation with bearing-only measurements[J]. International Journal of Adaptive Control and Signal Processing, 2022, 37(11): No.3517. |
| 5 | Nadler Nathaniel, Cohen Eliashiv, Medina Oded, et al. Bearing sensor for 3D localization and swarm centroid detection[J]. IEEE Sensors Journal, 2021, 21(23): 26716-26723. |
| 6 | Hu Jiang-ping, Hu Xiao-ming. Optimal target trajectory estimation and filtering using networked sensors [C]∥27th Chinese Control Conference (CCC), Kunming,China,2008: 540-545. |
| 7 | Deghat M, Lu Xia, Anderson B D O,et al. Multi-target localization and circumnavigation by a single agent using bearing measurements[J]. International Journal of Robust Nonlinear Control, 2015, 25: 2362-2374. |
| 8 | Shao Jing-ping, Tian Yu-ping. Multi-target localisation and circumnavigation by a multi-agent system with bearing measurements in 2D space[J]. International Journal of Systems Science, 2018, 49(1): 15-26. |
| 9 | Li Rui, Shi Ying-jing, Wu Xiao-qin, et al. Safe-circumnavigation of one single agent around a group of targets with only bearing information[J]. Journal of the Franklin Institute, 2019, 356(18): 11546-11560. |
| 10 | Cao Shi-da, Li Rui, Shi Ying-jing, et al. A low-cost estimator for target localization and circumnavigation using bearing measurements[J]. Journal of the Franklin Institute, 2020, 57(14): 9654-9672. |
| 11 | Cao Shi-da, Li Rui, Shi Ying-jing, et al. Safe convex-circumnavigation of one agent around multiple targets using bearing-only measurements[J]. Automatica, 2021, 134: No.109934. |
| 12 | Chen Bo, Hu Jiang-ping, Zhao Yi-yi, et al. Finite-time velocity-free rendezvous control of multiple AUV systems with intermittent communication[J]. IEEE Transactions on Systems, Man and Cybernetics: Systems, 2022, 52(10): 6618-6629. |
| 13 | Bhat S P, Bernstein D S. Finite-time stability of continuous autonomous systems[J]. SIAM Journal on Control and Optimization, 2000, 38(3): 751-766. |
| 14 | Shen Yan-jun, Huang Yue-hua. Global finite-time stabilisation for a class of non-linear systems[J]. International Journal of Systems Science, 2012, 43(1): 73-78. |
| 15 | Fu Jun, Chai Tian-you, Su Chun-yi, et al. Motion/force tracking control of nonholonomic mechanical systems via combining cascaded design and backstepping[J]. Automatica, 2013, 49(12): 3682-3686. |
| 16 | Mo Li-po, Yuan Xiao-lin, Li Qin. Finite-time rotating target-encirclement motion of multi-agent system with a leader[J]. Chinese Journal of Physics, 2018, 56(5): 2265-2274. |
| 17 | Zhang Chun-yan, Li Yin-ya, Qi Guo-qing, et al. Distributed finite-time control for coordinated circumnavigation with multiple non-holonomic robots[J]. Nonlinear Dynamics, 2019, 98(1):573-588. |
| 18 | Zhang Chun-yan, Li Yin-ya, Qi Guo-qing, et al. Distributed finite-time control for coordinated circumnavigation with multiple agents under directed topology[J]. Journal of the Franklin Institute, 2020, 357(16): 11710-11729. |
| 19 | Ma Zhou-jian, Kirubarajan Thiagalingam, Li Yin-ya. Finite-time encirclement rotating tracking for surface formation targets with bearing-only measurements[J]. Nonlinear Dynamics, 2021, 105(4): 3323-3339. |
| 20 | Polyakov A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE Transactions on Automatic Control, 2012, 57(8): 2106-2110. |
| 21 | Cheng Ye, Shi Bao, Liu Hong-liang. An improved class of fixed-time consensus protocols for multi-agent systems[J]. Journal of Applied Mathematics and Computing, 2020, 63(1/2): 439-454. |
| 22 | Wu Yan-zhi, Hu Jiang-ping, Xiang Lin-ying, et al. Finite-time output regulation of linear heterogeneous multi-agent systems[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(3): 1248-1252. |
| 23 | Zhang Teng-fei, Ling Jian-heng, Mo Li-po. Distributed finite-time rotating encirclement control of multiagent systems with nonconvex input constraints[J]. IEEE Access, 2019, 7: 102477-102486. |
| 24 | Zhang Teng-fei, Ling Jian-heng, Mo Li-po. Distributed multi-target rotating encirclement control of second-order multi-agent systems with nonconvex input constraints[J]. IEEE Access, 2020, 8: 27624-27633. |
| 25 | Trinh M H, Nguyen T T, Nguyen N H, et al. Fixed-time network localization based on bearing measurements[C]∥2020 American Control Conference,Denver, CO, USA, 2020: 903-908. |
| [1] | 张冲,胡云峰,宫洵,孙耀. 燃料电池阴极流量无模型自适应滑模控制器设计[J]. 吉林大学学报(工学版), 2022, 52(9): 2085-2095. |
| [2] | 王聪,马彦,王国光. 电动汽车充电站内的实时最优功率分配[J]. 吉林大学学报(工学版), 2021, 51(4): 1490-1495. |
| [3] | 王春阳, 辛瑞昊, 史红伟. 针对大滞后系统的滞后时间削弱自抗扰控制方法[J]. 吉林大学学报(工学版), 2017, 47(4): 1231-1237. |
| [4] | 赵刚, 孙壮志, 郭华君, 隋志阳, 李芳, 赵华兴. 基于离子聚合物金属基复合材料线性驱动单元的性能[J]. 吉林大学学报(工学版), 2016, 46(1): 221-227. |
| [5] | 王春阳, 蔡年春, 李明秋, 刘雪莲. 基于向量的鲁棒分数阶比例微分控制器参数求解算法[J]. 吉林大学学报(工学版), 2015, 45(6): 1933-1940. |
| [6] | 马修真,赵加凤. 基于Laguerre-Fuzzy Hammerstein模型的增压锅炉非线性预测控制[J]. 吉林大学学报(工学版), 2015, 45(1): 209-215. |
| [7] | 杨小军, 宋青松, 马祥, 李东海. 基于多模型信息滤波器的故障容错目标跟踪[J]. 吉林大学学报(工学版), 2013, 43(05): 1381-1385. |
| [8] | 贾鹤鸣, 宋文龙, 陈子印. 基于反馈增益反步法的非完整约束移动机器人路径跟踪控制[J]. , 2012, 42(04): 1003-1007. |
| [9] | 周淼磊, 高巍, 高琳琳, 刘富. 磁控形状记忆合金执行器迟滞非线性模型 [J]. , 2012, (03): 714-718. |
| [10] | 贾鹤鸣, 宋文龙, 郭婧. 基于神经网络滑模的采摘机械臂控制设计 [J]. , 2012, (03): 709-713. |
| [11] | 刘旺中, 陈照波, 黄山云, 焦映厚. 形状记忆合金迟滞模型 [J]. , 2012, (03): 719-725. |
| [12] | 贾秋菊, 陈增强. Hindmarsh-Rose神经元全局指数同步[J]. 吉林大学学报(工学版), 2011, 41(增刊1): 235-239. |
| [13] | 陈进东, 张相胜, 潘丰. 基于Wiener模型的非线性预测函数控制[J]. 吉林大学学报(工学版), 2011, 41(增刊1): 264-269. |
| [14] | 王艳敏,王常虹,冯勇. 具有逆变器死区补偿的永磁同步电动机滑模控制[J]. 吉林大学学报(工学版), 2010, 40(04): 1096-1101. |
| [15] | 徐涛, 杨晓光, 左文杰, 于征磊, 郝亮. 基于迭代线性矩阵不等式的模糊静态输出反馈控制[J]. 吉林大学学报(工学版), 2010, 40(03): 795-0799. |
|
||