吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 913-922.doi: 10.13229/j.cnki.jdxbgxb20220557
• 通信与控制工程 • 上一篇
无人机空地安全通信与航迹规划的多目标联合优化方法
何颖1( ),樊俊松2,王巍1,孙庚2(),刘衍珩1,2
),樊俊松2,王巍1,孙庚2(),刘衍珩1,2
- 1.长春财经学院 信息工程学院,长春 130122
2.吉林大学 软件学院,长春 130012
Joint optimization of secure communication and trajectory planning in unmanned aerial vehicle air⁃to⁃ground
Ying HE1(),Jun-song FAN2,Wei WANG1,Geng SUN2(),Yan-heng LIU1,2
- 1.College of Information and Engineering,Changchun University of Finance and Economics,Changchun 130122,China
2.College of Software,Jilin University,Changchun 130012,China
摘要:
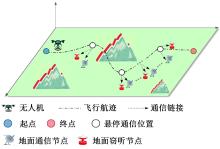
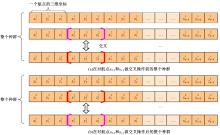
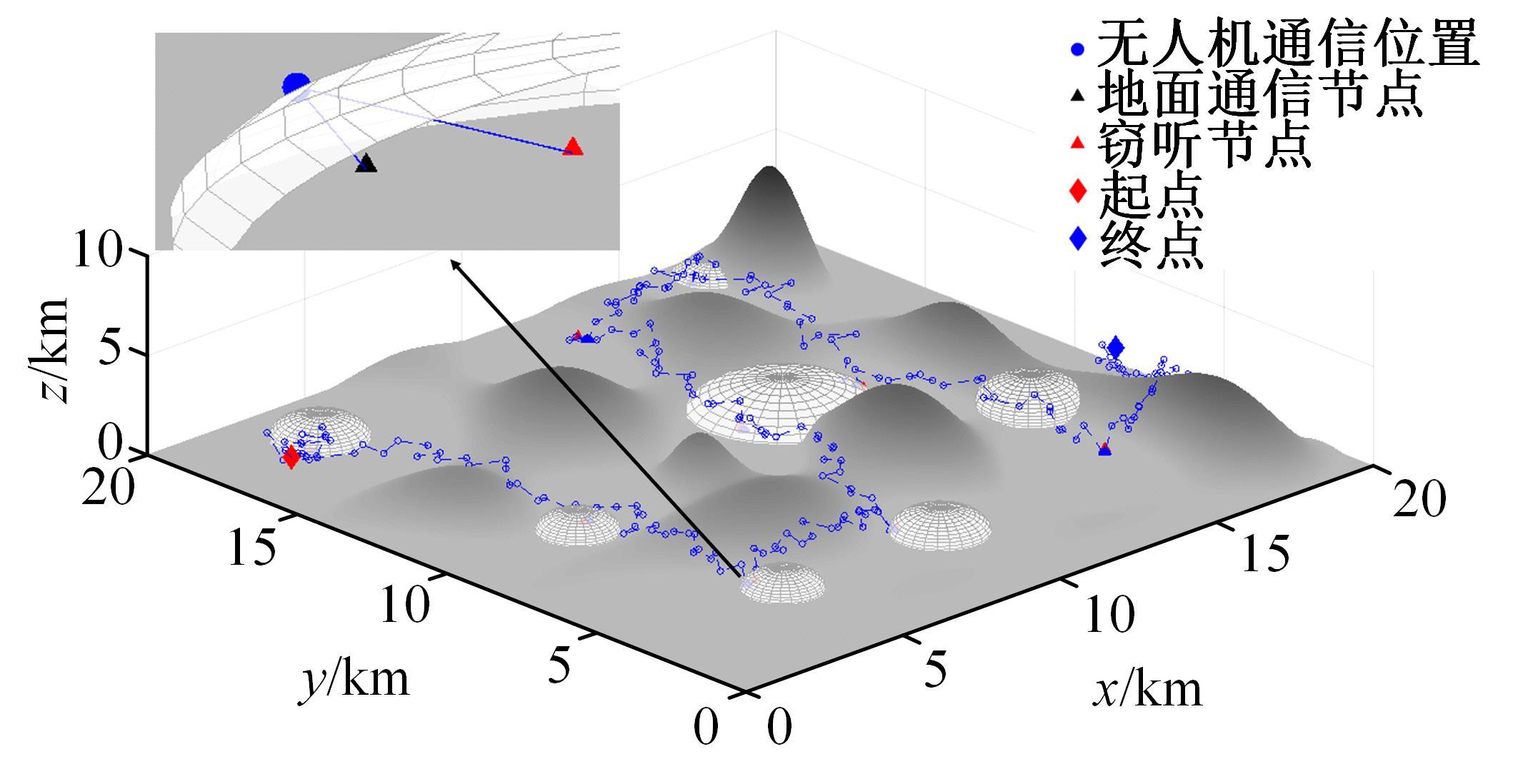
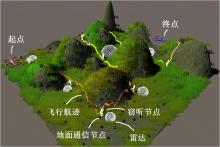
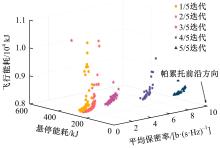
针对无人机在无线通信网络场景中的保密通信和飞行过程中保证安全节能问题,提出了一种多目标优化设计方案。基于无人机通信模型、无人机能耗模型和环境限制模型构建了无人机调度和航迹规划问题(USPOP)的多目标优化模型,以无人机无线通信的平均保密率、无人机悬停能耗和无人机飞行能耗3个目标为优化目标进行优化,并通过改进的第三代非支配排序遗传算法对问题进行求解。仿真结果表明,本文改进算法能有效解决构建的优化问题,并且相对于其他对比算法有更好的收敛效果。
中图分类号:
- TP393








| 1 | 鲜斌, 张诗婧, 韩晓薇, 等.基于强化学习的无人机吊挂负载系统轨迹规划[J]. 吉林大学学报: 工学版, 2021, 51(6): 2259-2267. |
| Xian Bin, Zhang Shi-jing, Han Xiao-wei, et al. Trajectory planning for unmanned aerial vehicle slung⁃payload aerial transportation system based on reinforcement learning[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(6): 2259-2267. | |
| 2 | Zeng Y, Wu Q, Zhang R. Accessing from the sky: a tutorial on UAV communications for 5G and beyond[J]. Proceedings of the IEEE, 2019, 107(12): 2327-2375. |
| 3 | Zhang G, Wu Q, Cui M, et al. Securing UAV communications via joint trajectory and power control[J]. IEEE Transactions on Wireless Communications, 2019, 18(2): 1376-1389. |
| 4 | Li A, Wu Q, Zhang R. UAV-enabled cooperative jamming for improving secrecy of ground wiretap channel[J]. IEEE Wireless Communications Letters, 2018, 8(1): 181-184. |
| 5 | 陈谋, 肖健, 姜长生.基于改进蚁群算法的无人机三维航路规划[J]. 吉林大学学报: 工学版, 2008, 38(4):991-995. |
| Chen Mou, Xiao Jian, Jiang Chang-sheng. Three dimensional path planning of UAV with improved ant algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2008, 38(4): 991-995. | |
| 6 | Chen H, Lu P, Xiao C. Dynamic obstacle avoidance for UAVs using a fast trajectory planning approach[C]∥2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 2019: 1459-1464. |
| 7 | Choi H H, Rubenecia A, Contreras P V, et al. Collision avoidance scheme for micro UAVs delivering information[C]∥2016 International Conference on Information Networking (ICOIN), Kota Kinabalu, Malaysia, 2016: 45-50. |
| 8 | Yin C, Xiao Z, Cao X, et al. Offline and online search: UAV multiobjective path planning under dynamic urban environment[J]. IEEE Internet of Things Journal, 2017, 5(2): 546-558. |
| 9 | Zeng Y, Xu J, Zhang R. Energy minimization for wireless communication with rotary-wing UAV[J]. IEEE Transactions on Wireless Communications, 2019, 18(4): 2329-2345. |
| 10 | Li J, Kang H, Sun G, et al. Physical layer secure communications based on collaborative beamforming for UAV networks: a multi-objective optimization approach[C]∥IEEE Conference on Computer Communications, Vancouver, BC, Canada, 2021: 1-10. |
| 11 | Shao S, Peng Y, He C, et al. Efficient path planning for UAV formation via comprehensively improved particle swarm optimization[J]. ISA Transactions, 2020, 97: 415-430. |
| 12 | Deb K, Jain H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part i: solving problems with box constraints[J]. IEEE Transactions on Evolutionary Computation, 2013, 18(4): 577-601. |
| 13 | Kasturi K, Nayak C K, Nayak M R. Electric vehicles management enabling G2V and V2G in smart distribution system for maximizing profits using MOMVO[J]. International Transactions on Electrical Energy Systems, 2019, 29(6): e12013. |
| 14 | Jain A, Lalwani S, Lalwani M. A comparative analysis of MOPSO, NSGA-II, SPEA2 and PESA2 for multi-objective optimal power flow[C]∥2018 2nd International Conference on Power, Energy and Environment: Towards Smart Technology (ICEPE), Shillong, India, 2018: 1-6. |
| 15 | 朱文强, 杨卫莉, 库硕, 等. 基于SPEA2算法的UCAV多目标机动轨迹规划[J]. 无人系统技术,2019, 2(6): 23-33. |
| Zhu Wen-qiang, Yang Wei-li, Ku Shuo, et al. Multi-objective maneuvering trajectory planning based on SPEA2 algorithm for UCAV[J]. Unmanned Systems Technology, 2019, 2(6): 23-33. |
| [1] | 薛珊,张亚亮,吕琼莹,曹国华. 复杂背景下的反无人机系统目标检测算法[J]. 吉林大学学报(工学版), 2023, 53(3): 891-901. |
| [2] | 吴振宇,刘小飞,王义普. 基于DKRRT*-APF算法的无人系统轨迹规划[J]. 吉林大学学报(工学版), 2023, 53(3): 781-791. |
| [3] | 陶博,颜伏伍,尹智帅,武冬梅. 基于高精度地图增强的三维目标检测算法[J]. 吉林大学学报(工学版), 2023, 53(3): 802-809. |
| [4] | 潘弘洋,刘昭,杨波,孙庚,刘衍珩. 基于新一代通信技术的无人机系统群体智能方法综述[J]. 吉林大学学报(工学版), 2023, 53(3): 629-642. |
| [5] | 郭鹏,赵文超,雷坤. 基于改进Jaya算法的双资源约束柔性作业车间调度[J]. 吉林大学学报(工学版), 2023, 53(2): 480-487. |
| [6] | 刘近贞,高国辉,熊慧. 用于脑组织分割的多尺度注意网络[J]. 吉林大学学报(工学版), 2023, 53(2): 576-583. |
| [7] | 时小虎,吴佳琦,吴春国,程石,翁小辉,常志勇. 基于残差网络的弯道增强车道线检测方法[J]. 吉林大学学报(工学版), 2023, 53(2): 584-592. |
| [8] | 祁贤雨,王巍,王琳,赵玉飞,董彦鹏. 基于物体语义栅格地图的语义拓扑地图构建方法[J]. 吉林大学学报(工学版), 2023, 53(2): 569-575. |
| [9] | 刘汉武,雷雨龙,阴晓峰,付尧,李兴忠. 增程式电动汽车增程器多点控制策略优化[J]. 吉林大学学报(工学版), 2022, 52(8): 1741-1750. |
| [10] | 周丰丰,朱海洋. 基于三段式特征选择策略的脑电情感识别算法SEE[J]. 吉林大学学报(工学版), 2022, 52(8): 1834-1841. |
| [11] | 曲福恒,丁天雨,陆洋,杨勇,胡雅婷. 基于邻域相似性的图像码字快速搜索算法[J]. 吉林大学学报(工学版), 2022, 52(8): 1865-1871. |
| [12] | 白天,徐明蔚,刘思铭,张佶安,王喆. 基于深度神经网络的诉辩文本争议焦点识别[J]. 吉林大学学报(工学版), 2022, 52(8): 1872-1880. |
| [13] | 赵宏伟,张健荣,朱隽平,李海. 基于对比自监督学习的图像分类框架[J]. 吉林大学学报(工学版), 2022, 52(8): 1850-1856. |
| [14] | 秦贵和,黄俊锋,孙铭会. 基于双手键盘的虚拟现实文本输入[J]. 吉林大学学报(工学版), 2022, 52(8): 1881-1888. |
| [15] | 胡丹,孟新. 基于时变网格的对地观测卫星搜索海上船舶方法[J]. 吉林大学学报(工学版), 2022, 52(8): 1896-1903. |
|
||