吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (9): 2732-2740.doi: 10.13229/j.cnki.jdxbgxb.20211187
• 农业工程·仿生工程 • 上一篇
仿生扑翼微型飞行器动态避障策略
郑皓1( ),余立均1,智鹏鹏1,2,汪忠来1,2()
),余立均1,智鹏鹏1,2,汪忠来1,2()
- 1.电子科技大学 机械与电气工程学院,成都 611731
2.电子科技大学 长三角研究院(湖州),浙江 湖州 313099
Dynamic obstacle avoidance strategy for flapping⁃wing micro air vehicles
Hao ZHENG1(),Li-jun YU1,Peng-peng ZHI1,2,Zhong-lai WANG1,2()
- 1.School of Mechanical and Electrical Engineering,University of Electronic Science and Technology of China,Chengdu 611731,China
2.Yangtze Delta Region Institute (Huzhou),University of Electronic Science and Technology of China,Huzhou 313099,China
摘要:
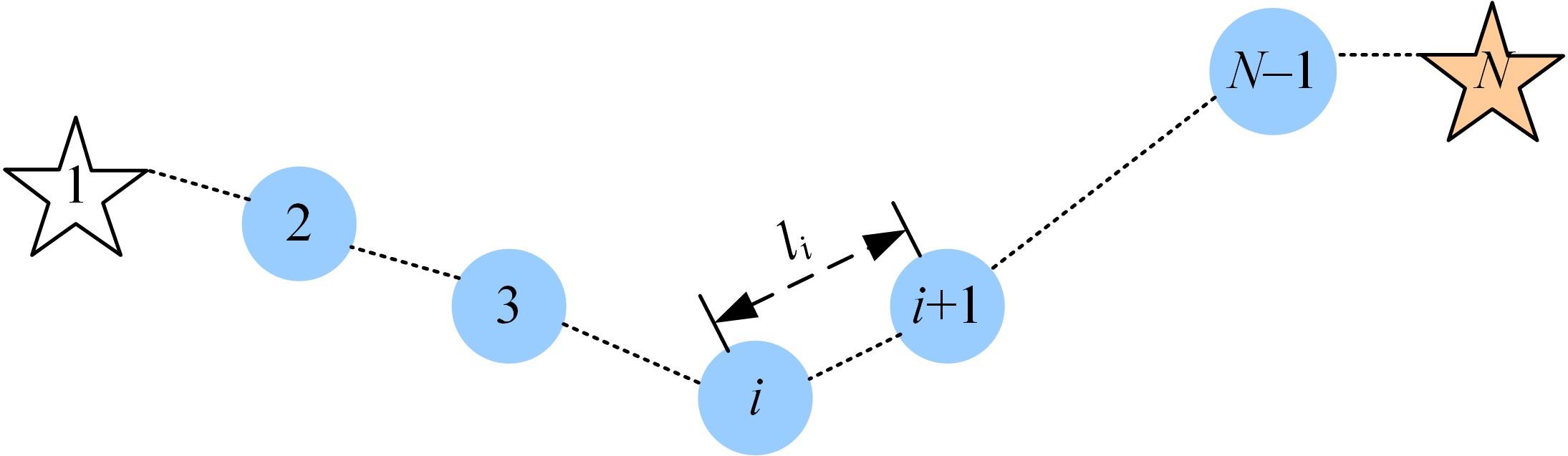
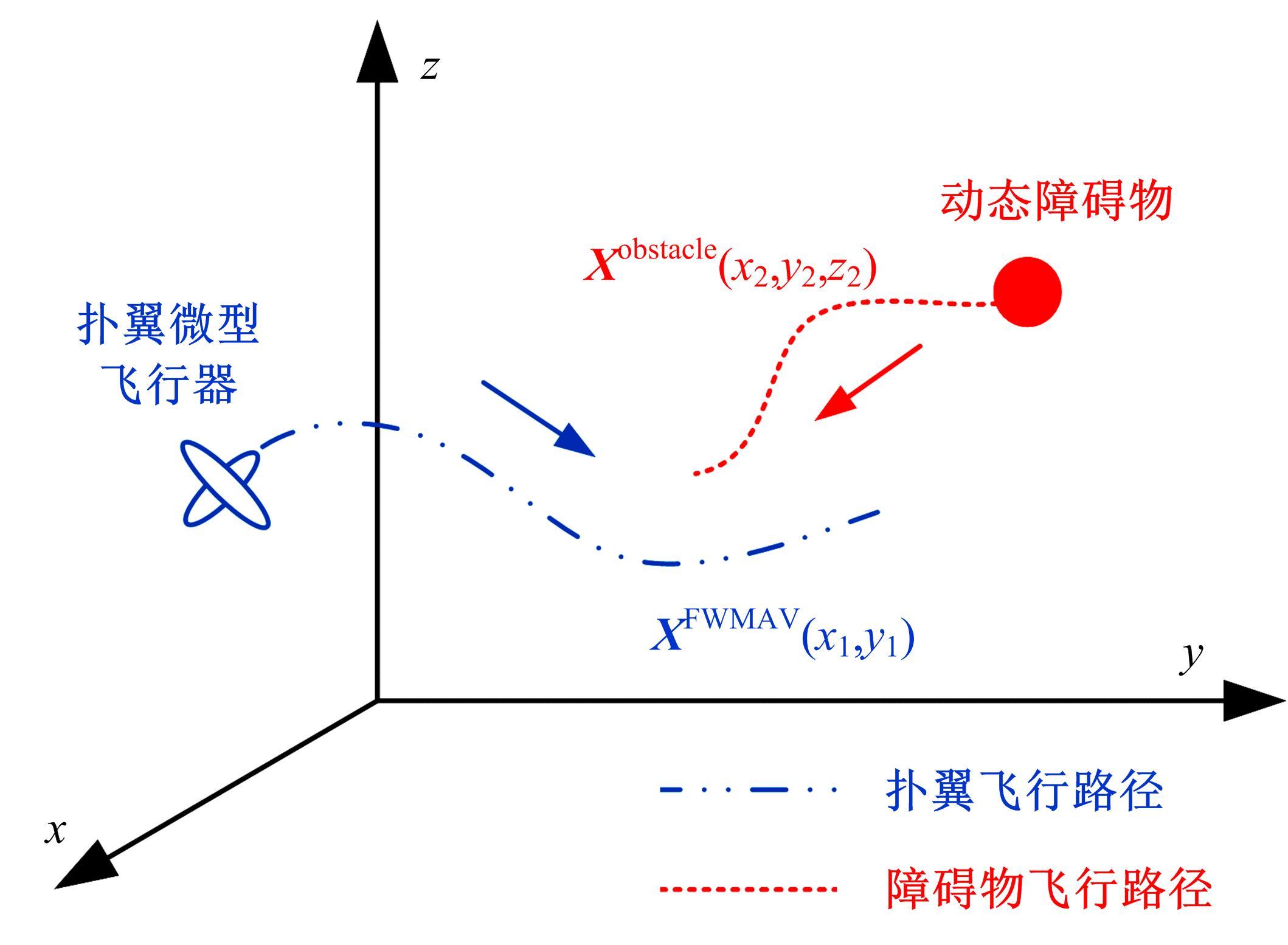
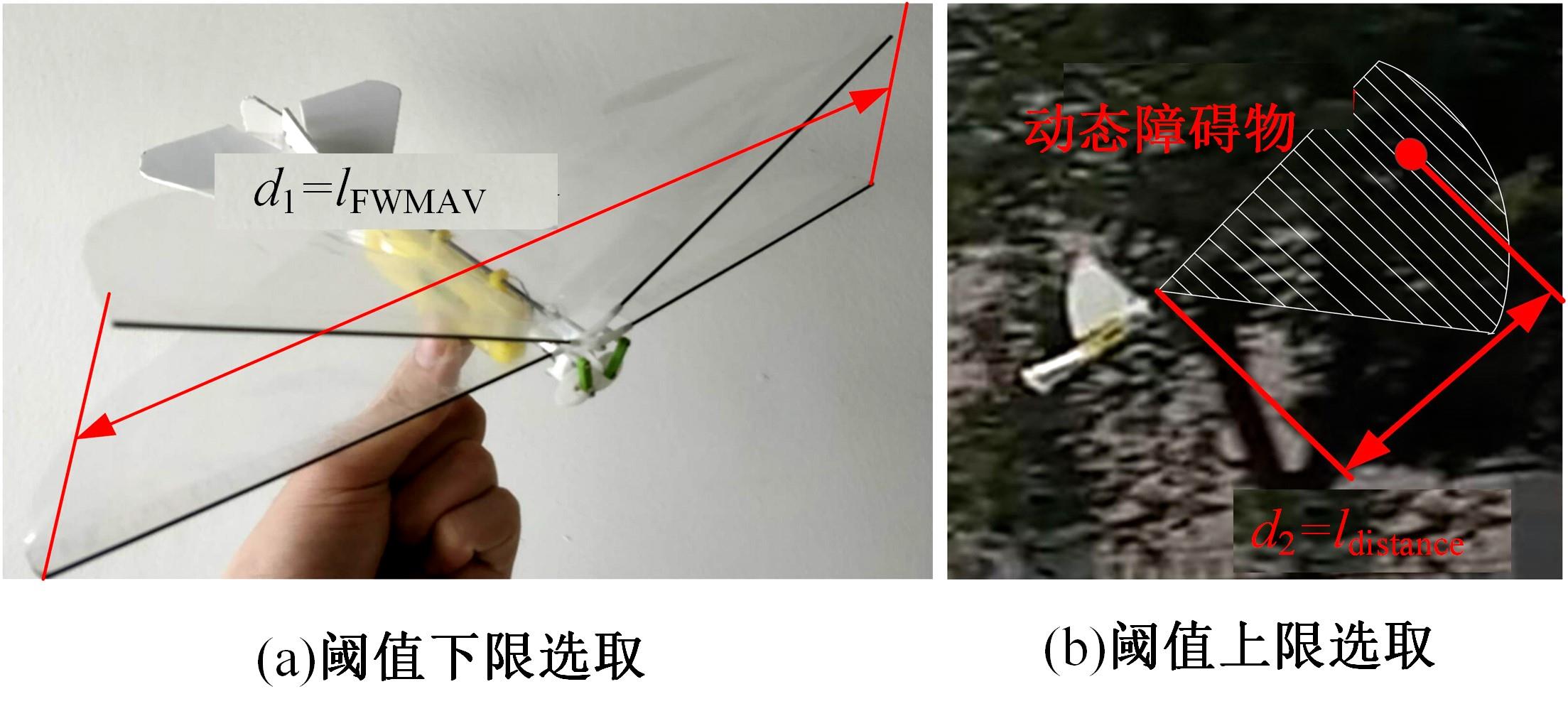
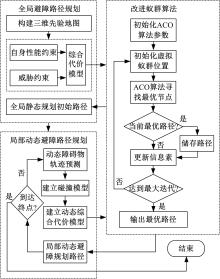
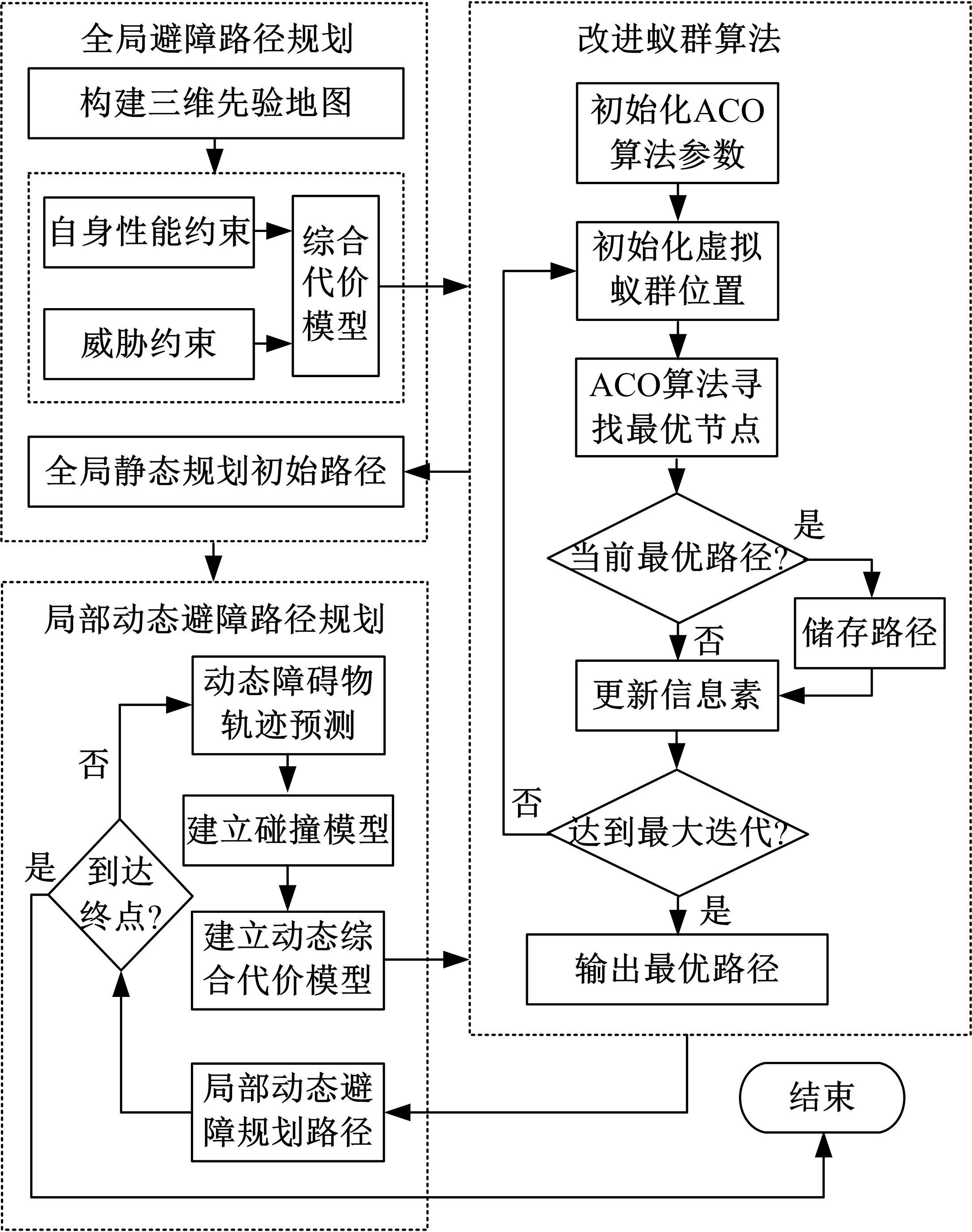
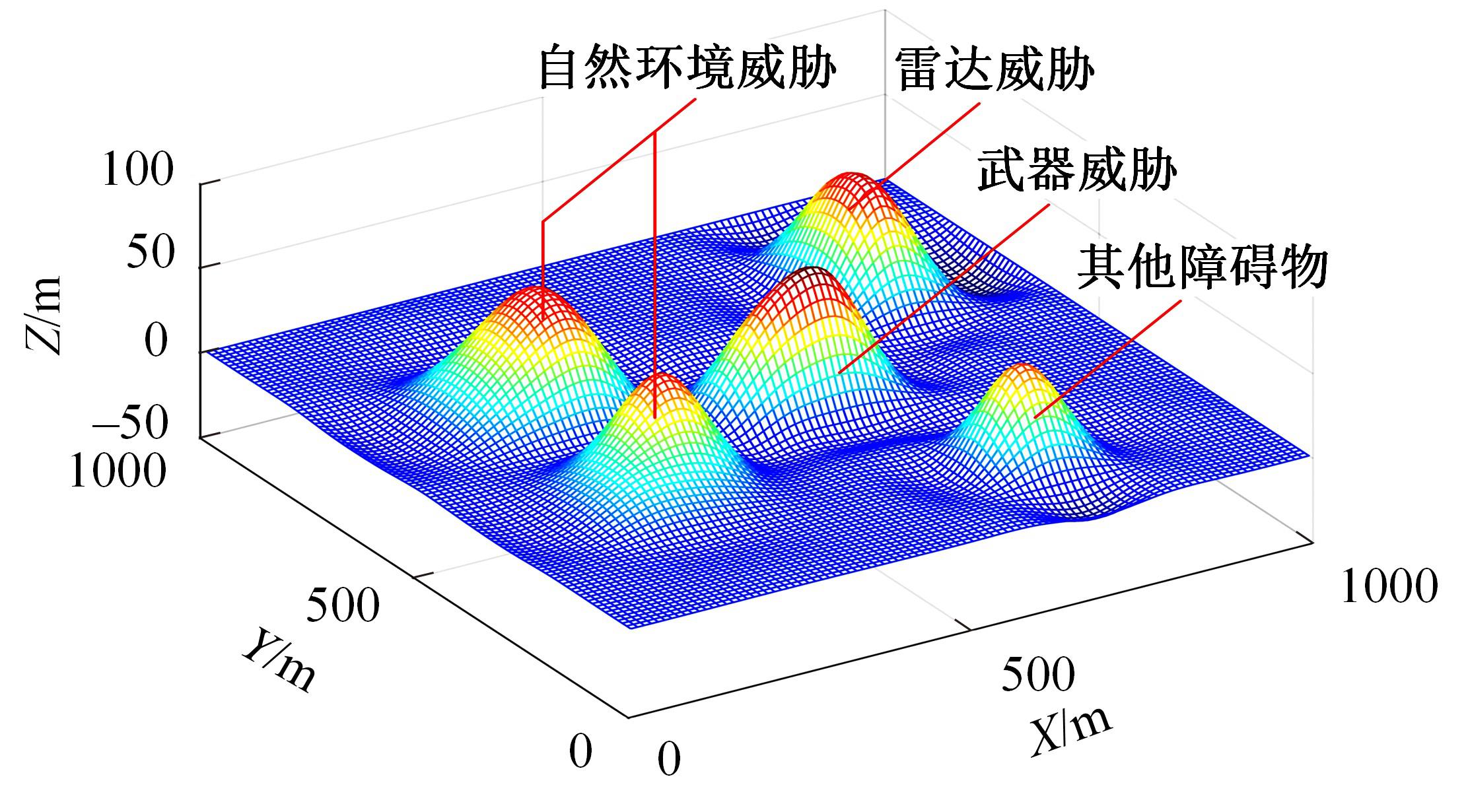
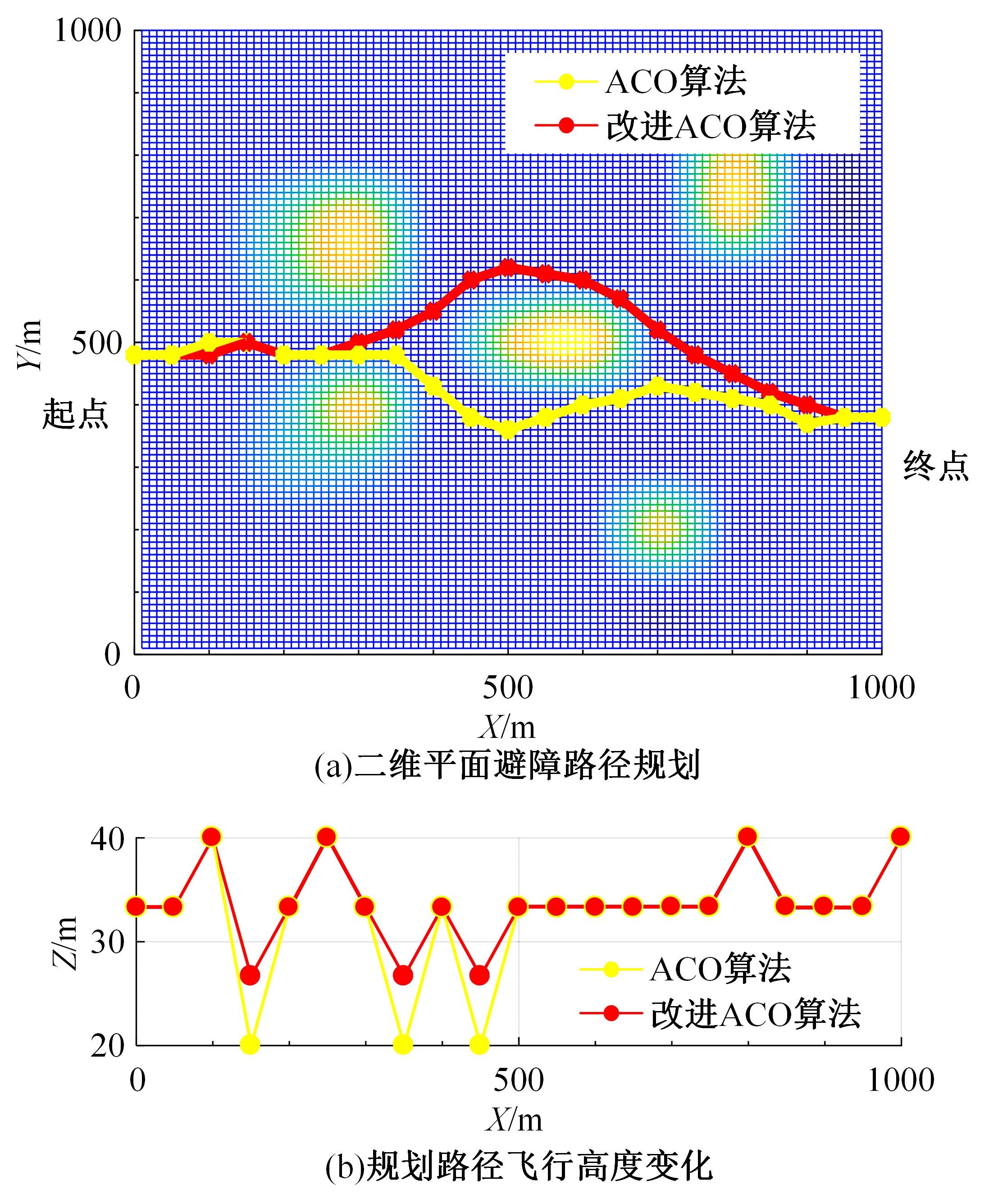
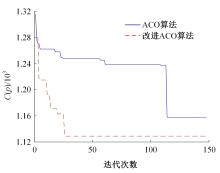
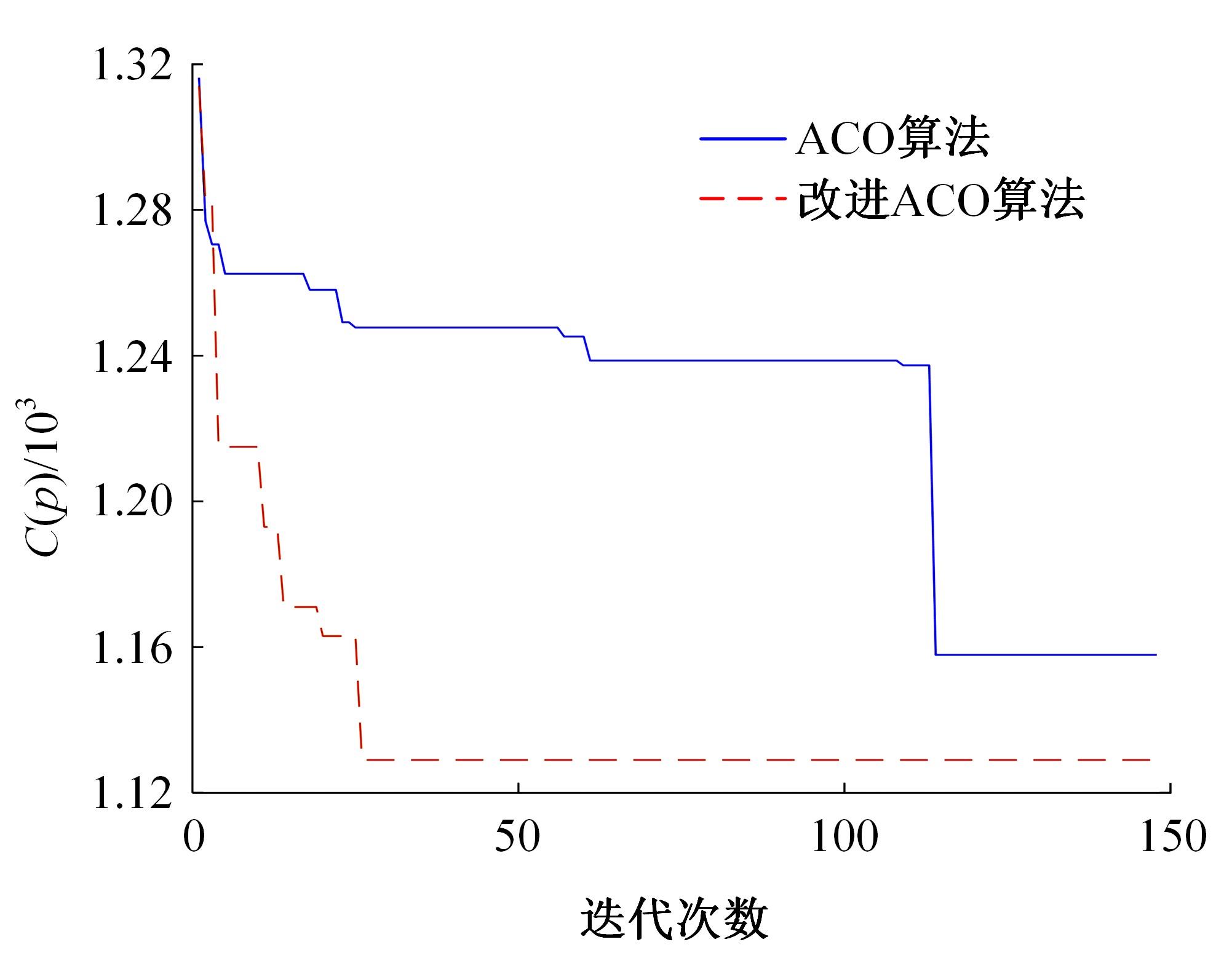
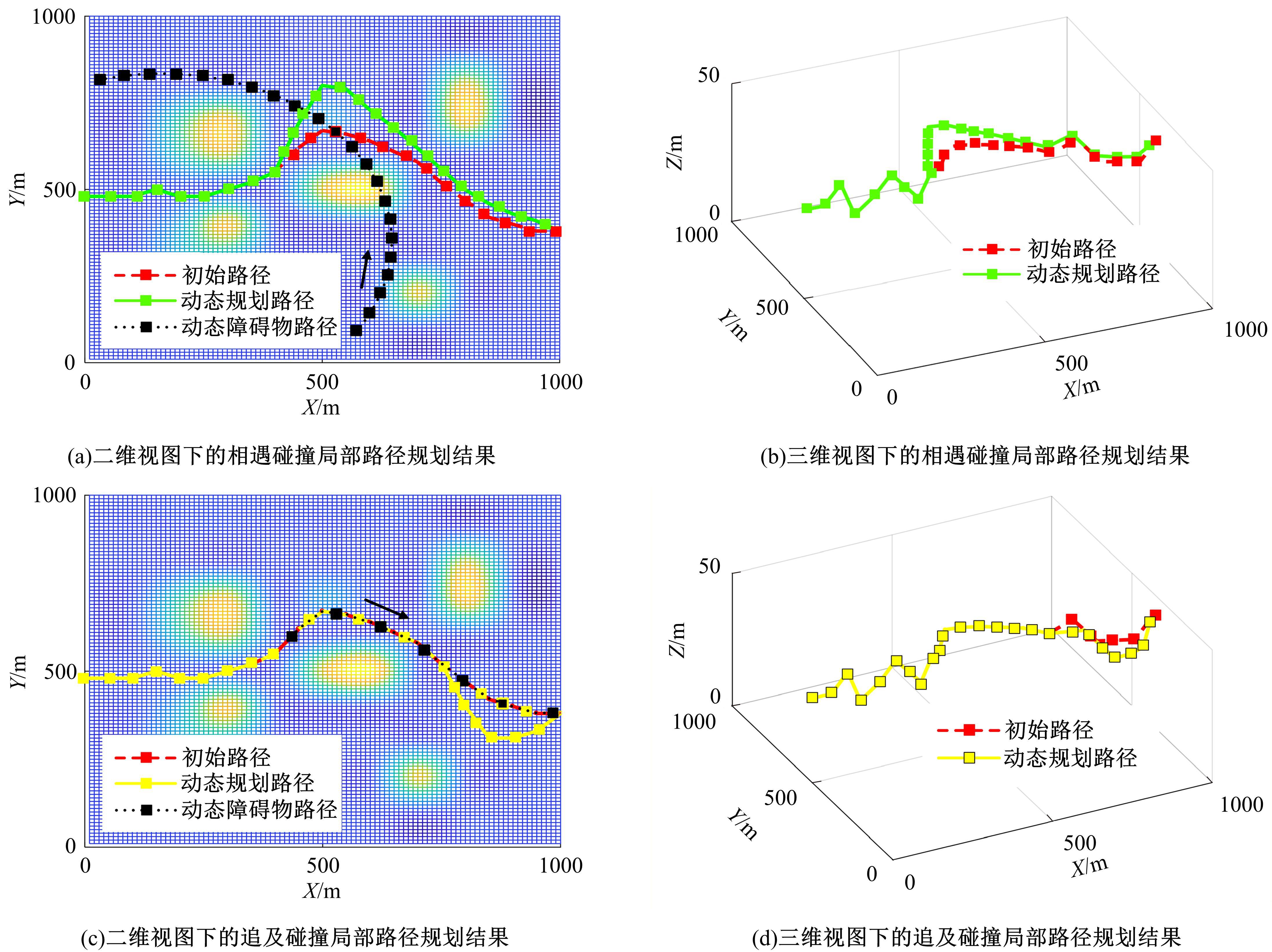
针对仿生扑翼微型飞行器飞行过程中的动态避障问题,提出了一种全局静态路径规划与局部动态路径规划相结合的避障路径规划策略。首先,综合考虑仿生扑翼微型飞行器的性能及其飞行环境,定义了路径规划的约束条件和代价函数,构建了全局静态避障的综合代价模型;其次,在此基础上考虑了动态障碍对其飞行性能的影响,提出基于时间窗口的碰撞约束,建立了融合局部动态避障规划的综合代价模型;最后,提出了改进蚁群算法,对综合全局静态路径规划与局部动态路径规划的避障路径规划进行优化求解。结果表明:本文综合动态避障路径规划策略可以有效地解决仿生扑翼微型飞行器在先验地图下的动态避障问题,一定程度上改进了动态障碍物下的避障路径寻优的不足;本文改进蚁群算法提升了动态路径寻优效率,保证了仿生扑翼微型飞行器避障控制的实时性要求。
中图分类号:
- V276

| 1 | Phan H V, Aurecianus S, Au T K L, et al. Towards long-endurance flight of an insect-inspired, tailless, two-winged, flapping-wing flying robot[J]. IEEE Robotics and Automation Letters, 2020, 5(4): 5059-5066. |
| 2 | Zhi P, Xu Y, Chen B. Time-dependent reliability analysis of the motor hanger for EMU based on stochastic process[J]. International Journal of Structural Integrity, 2020, 11(3): 453-469. |
| 3 | Li Y H, Sheng Z, Zhi P, et al. Multi-objective optimization design of anti-rolling torsion bar based on modified NSGA-III algorithm[J]. International Journal of Structural Integrity, 2021, 12(1): 17-30. |
| 4 | 霍凤财, 迟金, 黄梓健, 等. 移动机器人路径规划算法综述[J]. 吉林大学学报: 工学版, 2018, 36(6): 639-647. |
| Huo Feng-cai, Chi Jin, Huang Zi-jian, et al. Review of path planning for mobile robots[J]. Journal of Jilin University (Engineering and Technology Edition), 2018, 36(6): 639-647. | |
| 5 | Triharminto H H, Prabuwono A S, Adji T B, et al. UAV dynamic path planning for intercepting of a moving target: a review[J]. Communications in Computer & Information Science, 2013, 376: 206-219. |
| 6 | 程谦, 高嵩, 曹凯, 等. 基于PRM优化算法的移动机器人路径规划[J]. 计算机应用与软件, 2020, 37(12): 254-259. |
| Cheng qian, Gao song, Cao kai, et al. Path planning of mobile robot based on PRM optimization algorithm[J]. Computer Applications and Software, 2020, 37(12): 254-259. | |
| 7 | Kong X D, Pan B, Cherkashin E, et al. Multi-constraint UAV fast path planning based on improved A* algorithm[J]. Journal of Physics: Conference Series, 2020, 1624(4): No.042009. |
| 8 | 林韩熙, 向丹, 欧阳剑, 等. 移动机器人路径规划算法的研究综述[J]. 计算机工程与应用, 2021, 57(18): 38-48. |
| Lin Han-xi, Xiang Dan, Ouyang Jian, et al. Review of path planning algorithms for mobile robots[J]. Computer Engineering and Applications, 2021, 57(18): 38-48. | |
| 9 | 戴健, 许菲, 陈琪锋. 多无人机协同搜索区域划分与路径规划[J]. 航空学报, 2020, 41(): 149-156. |
| Dai Jian, Xu Fei, Chen Qi-feng. Multi-UAV cooperative search on region division and path planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(Sup.1): 149-156. | |
| 10 | 李波, 杨志鹏, 贾卓然, 等. 一种无监督学习型神经网络的无人机全区域侦察路径规划[J]. 西北工业大学学报, 2021, 39(1): 77-84. |
| Li Bo, Yang Zhi-peng, Jia Zhuo-ran. An unsupervised learning neural network for planning UAV full-area reconnaissance path[J]. Journal of Northwestern Polytechnical University, 2021, 39(1): 77-84. | |
| 11 | 王巍, 梁桥. 基于单目视觉和惯性测量的飞行器自定位研究[J]. 吉林大学学报: 工学版, 2016, 34(6): 774-780. |
| Wang Wei, Liang Qiao. Research of ego-positioning for micro air vehicles based on monocular vision and inertial measurement[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 34(6): 774-780. | |
| 12 | 王晓东, 张永强, 薛红. 基于改进蚁群算法对VRP线路优化[J]. 吉林大学学报: 工学版, 2017, 35(2): 198-203. |
| Wang Xiao-dong, Zhang Yong-qiang, Xue Hong. Improved ant colony algorithm for VRP[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 35(2): 198-203. | |
| 13 | Ho H W, Wagter C D, Remes B D W, et al. Optical-flow based self-supervised learning of obstacle appearance applied to MAV landing[J]. Robotics and Autonomous Systems, 2018, 100: 78-94. |
| 14 | Tijmons S, Croon D G C H E, Remes B D W, et al. Obstacle avoidance strategy using onboard stereo vision on a flapping wing MAV[J]. IEEE Transactions on Robotics, 2017, 33(4): 858-874. |
| 15 | Tu Z, Fei F, Zhang J, et al. Acting is seeing: navigating tight space using flapping wings[C]∥2019 International Conference on Robotics and Automation, Montreal, Canada, 2019: 95-101. |
| 16 | 余立均. 仿生扑翼微型飞行器路径规划研究[D]. 成都: 电子科技大学航空学院, 2021. |
| Yu Li-jun. Study on path planning of bio-inspired flapping-wing micro aerial vehicles[D]. Chengdu: College of Aeronautics, University of Electronic Science and Technology of China, 2021. |
| [1] | 武小花,余忠伟,朱张玲,高新梅. 燃料电池公交车模糊能量管理策略[J]. 吉林大学学报(工学版), 2022, 52(9): 2077-2084. |
| [2] | 刘兴涛,林思源,武骥,何耀,刘新天. 计及电池功率状态的再生制动优化策略[J]. 吉林大学学报(工学版), 2022, 52(12): 2796-2805. |
| [3] | 宋大凤,杨丽丽,曾小华,王星琦,梁伟智,杨南南. 基于行驶工况合成的混合动力汽车电池寿命优化[J]. 吉林大学学报(工学版), 2021, 51(3): 781-791. |
| [4] | 刘富,安毅,董博,李元春. 基于ADP的可重构机械臂能耗保代价分散最优控制[J]. 吉林大学学报(工学版), 2020, 50(1): 342-350. |
| [5] | 杨毅,王斯财,南英. 大型水陆两栖飞机海上最优搜索航路规划算法[J]. 吉林大学学报(工学版), 2019, 49(3): 963-971. |
| [6] | 赖晴鹰,刘军,赵若愚,骆泳吉,孟令云,徐亚之. 基于变间距动态规划的中高速磁悬浮列车 速度曲线优化[J]. 吉林大学学报(工学版), 2019, 49(3): 749-756. |
| [7] | 席利贺,张欣,孙传扬,王泽兴,姜涛. 增程式电动汽车自适应能量管理策略[J]. 吉林大学学报(工学版), 2018, 48(6): 1636-1644. |
| [8] | 周炳海, 徐佳惠, 彭涛. 基于新型线边集成超市的周期性物料配送优化[J]. 吉林大学学报(工学版), 2018, 48(2): 588-595. |
| [9] | 宋传学, 周放, 肖峰. 基于动态规划的复合电源能量管理优化[J]. 吉林大学学报(工学版), 2017, 47(1): 8-14. |
| [10] | 潘义勇, 马健霄, 孙璐. 基于可靠度的动态随机交通网络耗时最优路径[J]. 吉林大学学报(工学版), 2016, 46(2): 412-417. |
| [11] | 潘义勇, 孙璐. 随机交通网络环境下自适应最可靠路径问题[J]. 吉林大学学报(工学版), 2014, 44(6): 1622-1627. |
| [12] | 门朝光, 边继龙, 李香. 基于限制搜索空间的快速立体匹配方法[J]. 吉林大学学报(工学版), 2012, 42(02): 423-428. |
| [13] | 李誌, 刘元宁, 张浩, 沈廷杰, 李杰, 翟洪亮. 基于动态规划RNA二级结构的比较[J]. 吉林大学学报(工学版), 2011, 41(增刊2): 250-253. |
| [14] | 左义和1,2,项昌乐1,2,闫清东1,2,王伟达1. 基于动态规划算法的混联混合动力汽车控制策略[J]. 吉林大学学报(工学版), 2011, 41(4): 898-903. |
| [15] | 余军, 张长海, 张浩, 赵冠男, 刘元宁. 基于茎区的动态规划算法的核糖核酸二级结构预测[J]. 吉林大学学报(工学版), 2011, 41(02): 452-0457. |
|