吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (3): 610-619.doi: 10.13229/j.cnki.jdxbgxb.20220537
• 车辆工程·机械工程 • 上一篇
基于模型预测反馈技术的救援车辆液压悬挂系统控制方法
李文航1( ),倪涛1,2(),赵丁选3,邓英杰3,师小波2
),倪涛1,2(),赵丁选3,邓英杰3,师小波2
- 1.吉林大学 机械与航空航天工程学院,长春 130022
2.燕山大学 车辆与能源学院,秦皇岛 066004
3.燕山大学 机械工程学院,秦皇岛 066004
Control method on hydraulic suspension systems of rescue vehicles based on model predictive feedback technology
Wen-hang LI1(),Tao NI1,2(),Ding-xuan ZHAO3,Ying-jie DENG3,Xiao-bo SHI2
- 1.School of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China
2.School of Vehicle and Energy,Yanshan University,Qinhuangdao 066004,China
3.School of Mechanical Engineering,Yanshan University,Qinhuangdao 066004,China
摘要:
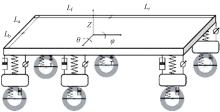
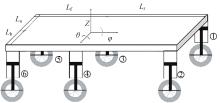
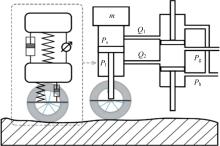
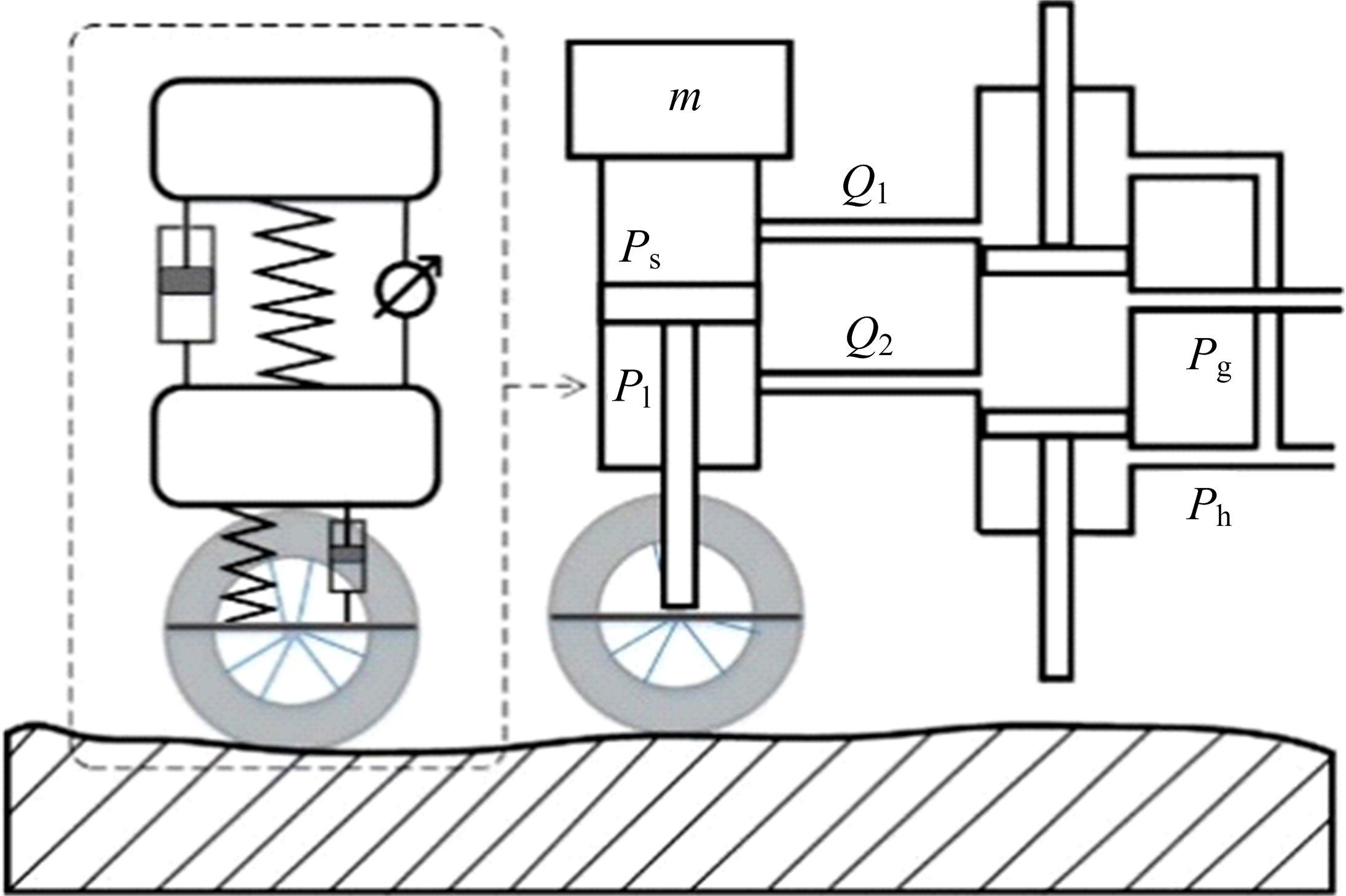
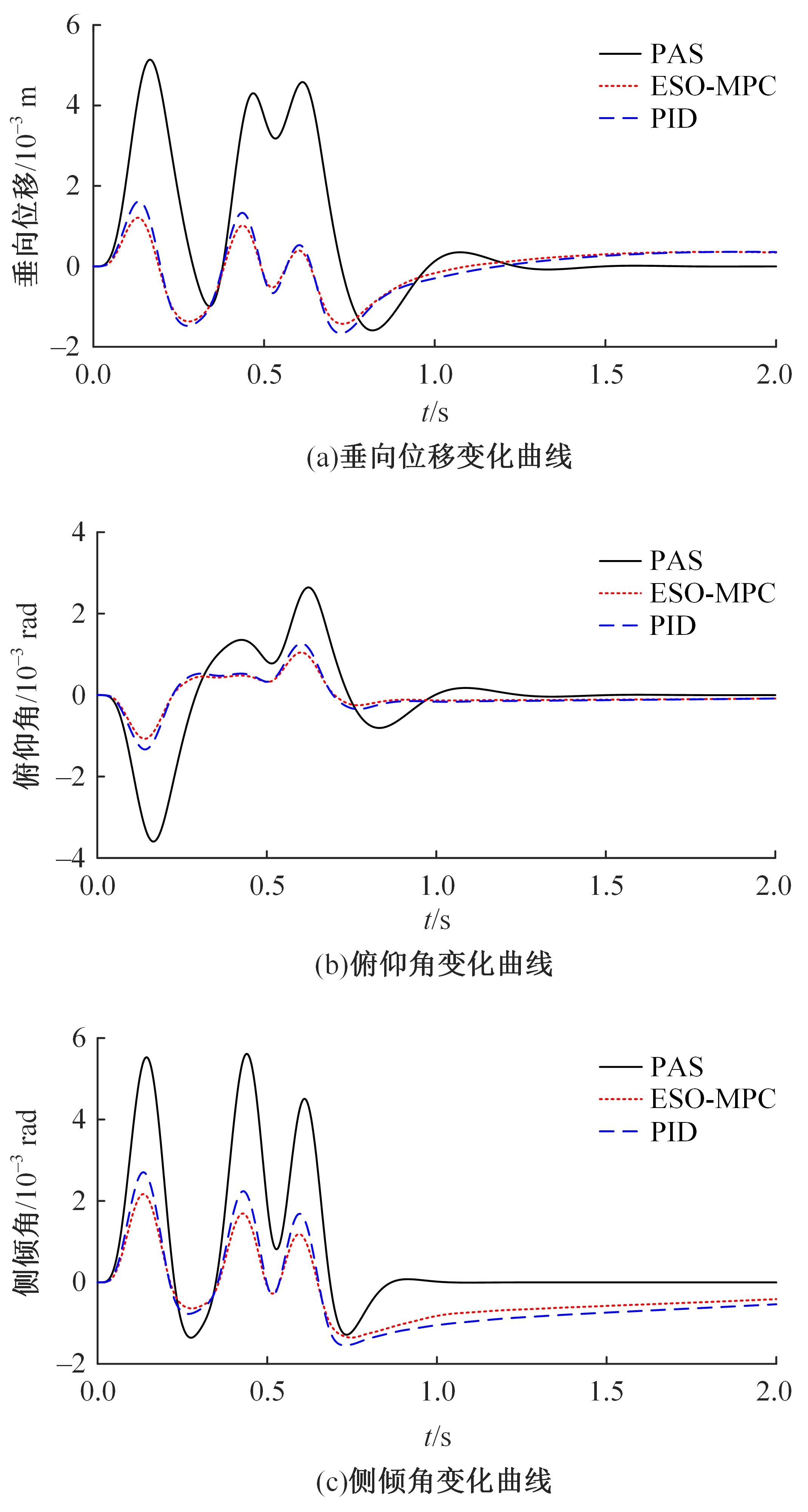
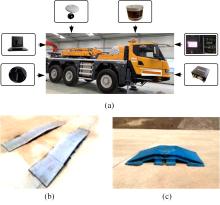
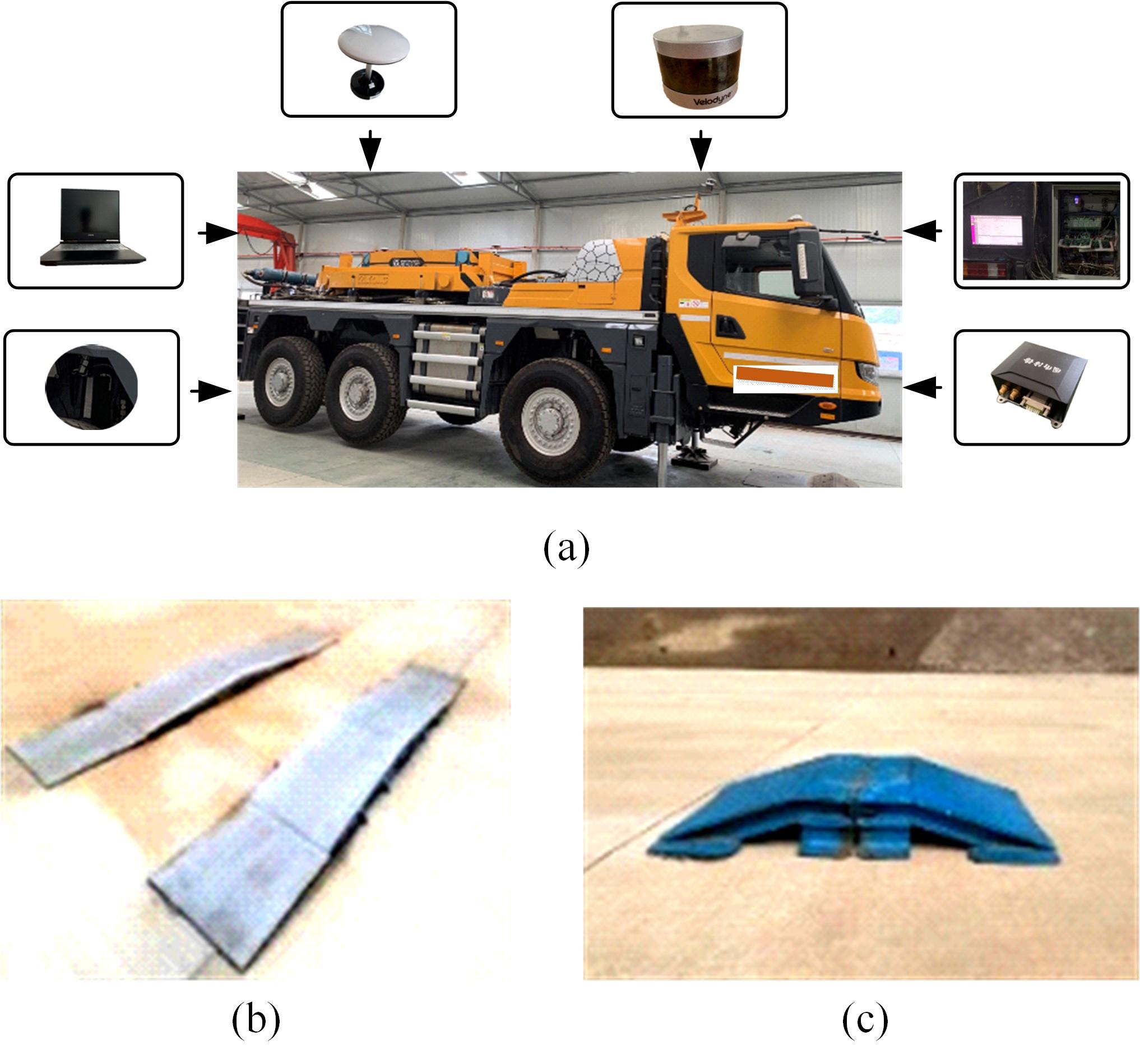
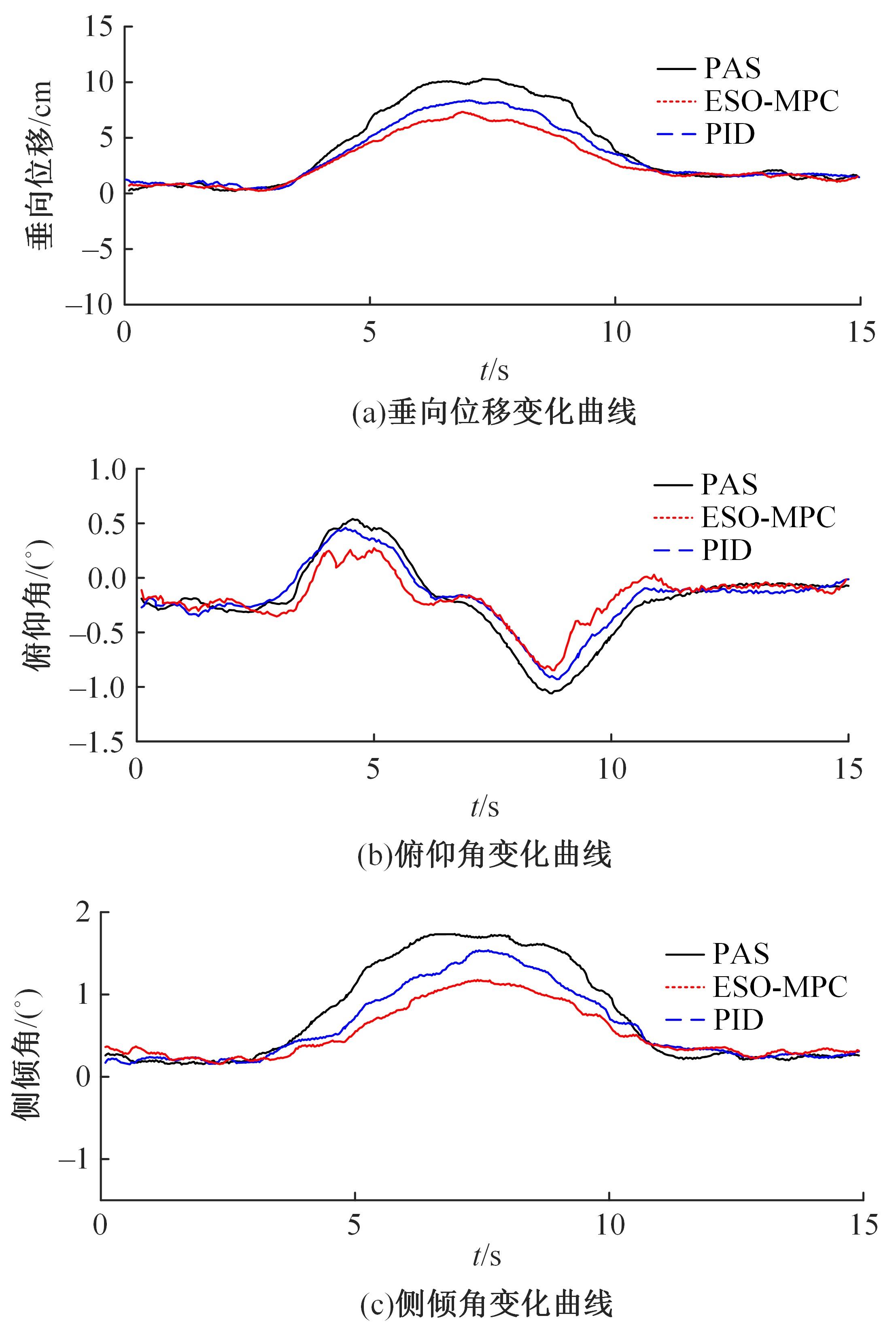
针对现有救援车辆的液压悬挂系统存在作动器非线性、参数不确定性以及对动力学模型依赖性较强等问题,提出了一种液压主动悬挂系统控制方法——基于扩张状态观测器的模型预测控制方法(ESO-MPC)。首先,通过车载惯性导航系统实时获取车辆位姿信息,并基于位姿偏差方法计算出各个液压作动器的输出位移量。其次,完成救援车辆液压悬挂系统动力学建模,通过扩张状态观测器估计系统中的非线性扰动和未知输出信号。最后,基于扩张状态观测器的模型预测控制方法,使每个液压作动器的输出在限制范围内对期望位移信号进行有效追踪。为验证该控制方法的有效性,搭建了液压悬架整车试验平台,并与被动悬架和传统PID控制方法进行了多种路面对比试验。结果表明,相比于被动悬挂和传统的PID控制方法,本文提出的基于扩张状态观测器的模型预测控制方法可以降低垂向高度均方根值35%,俯仰角度均方根值17%,侧倾角度均方根值23%,显著提升了车辆的行驶平顺性和操纵稳定性。
中图分类号:
- TP273




| 1 | 高路路, 马飞, 周志鸿, 等. 应急救援车辆产品概况[J]. 凿岩 机械气动工具, 2017(1): 52-61. |
| Gao Lu-lu, Ma Fei, Zhou Zhi-hong, et al. Products overview of emergency rescue vehicle[J]. Rock Drilling Machinery & Pneumatic Tools, 2017(1): 52-61. | |
| 2 | 王大壮. 高机动多轴应急救援车辆主动悬挂技术研究[D]. 长春: 吉林大学机械与航空航天工程学院, 2019. |
| Wang Da-zhuang. Research on active suspension technology of high-mobility multi-axle emergency rescue vehicles[D]. Changchun: School of Mechanical and Aerospace Engineering, Jilin University, 2019. | |
| 3 | Hao R, Wang H, Liu S, et al. Multi-objective command filtered adaptive control for nonlinear hydraulic active suspension systems[J]. Nonlinear Dynamics, 2021, 105(2): 1559-1579. |
| 4 | Yao Z K, Yao J Y, Sun W C. Adaptive RISE control of hydraulic systems with multilayer neural-networks[J]. IEEE Transactions on Industrial Electronics, 2018, 66(11): 8638-8647. |
| 5 | Guo Q, Yin J, Yu T, et al. Saturated adaptive control of an electrohydraulic actuator with parametric uncertainty and load disturbance[J]. IEEE Transactions on Industrial Electronics, 2017, 64(10): 7930-7941. |
| 6 | Guo Q, Chen Z. Neural adaptive control of single-rod electrohydraulic system with lumped uncertainty[J]. Mechanical Systems and Signal Processing, 2021, 146: No. 106869. |
| 7 | Sun J W, Zhao K. Adaptive neural network sliding mode control for active suspension systems with electrohydraulic actuator dynamics[J/OL]. [2022-04-20]. |
| 8 | Wang M, Wang Y, Yang R, et al. A sliding mode control strategy for an electro hydrostatic actuator with damping variable sliding surface[J]. Actuators, 2020, 10(1): 3-20. |
| 9 | Ma W, Deng W, Yao J. Continuous integral robust control of electro-hydraulic systems with modeling uncertainties[J]. IEEE Access, 2018, 6: 46146-46156. |
| 10 | Li X, Yao J, Zhou C. Adaptive robust output-feedback motion control of hydraulic actuators[J]. International Journal of Adaptive Control and Signal Processing, 2017, 31(11): 1544-1566. |
| 11 | Du M, Zhao D, Ni T, et al. Output feedback control for active suspension electro-hydraulic actuator systems with a novel sampled-data nonlinear extended state observer[J/OL]. [2022-04-25]. |
| 12 | Gu W W, Yao J Y, Yao Z K, et al. Output feedback model predictive control of hydraulic systems with disturbances compensation[J]. ISA Transactions, 2018, 88: 216-224. |
| 13 | Yao J, Jiao Z, Ma D. Extended state observer based output feedback nonlinear robust control of hydraulic systems with backstepping[J]. IEEE Transactions on Industrial Electronics, 2014, 61(11): 6285-6293. |
| 14 | Morato M M, Nguyen M Q, Sename O. Design of a fast real-time LPV model predictive control system for semi-active suspension control of a full vehicle[J]. Journal of the Franklin Institute, 2019, 356(3): 1196-1224. |
| 15 | Mai V N, Yoon D S, Choi S B, et al. Explicit model predictive control of semi-active suspension systems with magneto-rheological dampers subject to input constraints[J]. Journal of Intelligent Material Systems and Structures, 2020, 31(9): 1157-1170. |
| 16 | Wang D Z, Zhao D X, Gong M D, et al. Research on robust model predictive control for electro-hydraulic servo active suspension systems[J/OL]. [2022-04-25]. |
| 17 | Göhrle C, Schindler A, Wagner A, et al. Design and vehicle implementation of preview active suspension controllers[J]. IEEE Transactions on Control Systems Technology, 2014, 22(3): 1135-1142. |
| 18 | Theunissen J, Sorniotti A, Gruber P. Regionless explicit model predictive control of active suspension systems with preview[J]. IEEE Transactions on Industrial Electronics, 2019, 67(6): 4877-4888. |
| 19 | 陈虹. 模型预测控制[M]. 北京: 科学出版社, 2013. |
| 20 | Ghaleb F A, Zainal A, Rassam M A, et al. Improved vehicle positioning algorithm using enhanced innovation-based adaptive Kalman filter[J]. Pervasive and Mobile Computing, 2017, 40: 139-155. |
| 21 | Gao Z, Shen W, Zhang H, et al. Application of helmert variance component based adaptive kalman filter in multi-GNSS PPP/INS tightly coupled integration[J]. Remote Sensing, 2016, 8(7): No. 553. |
| 22 | Huang Y, Wang J Z, Shi D W. On convergence of extended state observers for discrete-time nonlinear systems[J/OL]. [2022-04-25]. |
| [1] | 赵靖华,张雨彤,曹派,王忠恕,李小平,孙亚南,解方喜. 压缩天然气发动机增程式电动汽车能量管理优化[J]. 吉林大学学报(工学版), 2024, 54(3): 600-609. |
| [2] | 江和耀,王永海,吴幼冬,王萍. 四轮毂驱动电动车辆横向稳定与侧倾预防协同控制策略[J]. 吉林大学学报(工学版), 2024, 54(2): 540-549. |
| [3] | 赵靖华,杜世豪,刘靓葳,胡云峰,孙耀,解方喜. 基于改进混沌优化的选择性催化还原系统参数辨识方法[J]. 吉林大学学报(工学版), 2024, 54(2): 550-557. |
| [4] | 赵又群,林涛,林棻,沈峘. 基于ESO的机械弹性电动轮式车辆稳定性控制[J]. 吉林大学学报(工学版), 2024, 54(1): 44-54. |
| [5] | 王德军,张凯然,徐鹏,顾添骠,于文雅. 基于车辆执行驱动能力的复杂路况速度规划及控制[J]. 吉林大学学报(工学版), 2023, 53(3): 643-652. |
| [6] | 谢波,高榕,许富强,田彦涛. 低附着路况条件下人车共享转向系统稳定控制[J]. 吉林大学学报(工学版), 2023, 53(3): 713-725. |
| [7] | 何德峰,周丹,罗捷. 跟随式车辆队列高效协同弦稳定预测控制[J]. 吉林大学学报(工学版), 2023, 53(3): 726-734. |
| [8] | 申富媛,李炜,蒋栋年. 四旋翼无人机寿命预测和自主维护方法[J]. 吉林大学学报(工学版), 2023, 53(3): 841-852. |
| [9] | 王守瑞,靳伍银,芮执元,张霞. 基于快速非奇异终端滑模的三维天车负载摆动控制[J]. 吉林大学学报(工学版), 2023, 53(12): 3508-3517. |
| [10] | 孙耀,胡云峰,周杰敏,程欢,曲婷,赵靖华,陈虹. 基于分层控制器的SCR系统滚动时域优化控制方法[J]. 吉林大学学报(工学版), 2023, 53(1): 61-71. |
| [11] | 胡云峰,于彤,杨惠策,孙耀. 低温环境下燃料电池启动优化控制方法[J]. 吉林大学学报(工学版), 2022, 52(9): 2034-2043. |
| [12] | 高金武,王义琳,刘华洋,王艺达. 基于滑模观测器的质子交换膜燃料电池阴极进气系统解耦控制[J]. 吉林大学学报(工学版), 2022, 52(9): 2156-2167. |
| [13] | 高金武,贾志桓,王向阳,邢浩. 基于PSO-LSTM的质子交换膜燃料电池退化趋势预测[J]. 吉林大学学报(工学版), 2022, 52(9): 2192-2202. |
| [14] | 李昂,杨泓渊,雷小萌,宋凯文,千承辉. 基于等效连杆模型的六足机器人行进姿态闭环控制[J]. 吉林大学学报(工学版), 2022, 52(7): 1696-1708. |
| [15] | 吴文静,战勇斌,杨丽丽,陈润超. 考虑安全间距的合流区可变限速协调控制方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1315-1323. |
|
||