吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (2): 529-536.doi: 10.13229/j.cnki.jdxbgxb.20230395
• 交通运输工程·土木工程 • 上一篇
路侧多源感知数据集规范化构建方法
李立1( ),鲍宇健1,杨文臣2,楚庆玲1,汪贵平1
),鲍宇健1,杨文臣2,楚庆玲1,汪贵平1
- 1.长安大学 电子与控制工程学院,西安 710064
2.云南省交通规划设计研究院有限公司 陆地交通气象灾害防治技术国家工程实验室,昆明 650200
Standardized constructing method of a roadside multi-source sensing dataset
Li LI1(),Yu-jian BAO1,Wen-chen YANG2,Qing-ling CHU1,Gui-ping WANG1
- 1.School of Electronic and Control Engineering,Chang'an University,Xi'an 710064,China
2.National Engineering Laboratory For Surface Transportation Weather Impacts Prevention,Broadvision Engineering Consultants Co. ,Ltd. ,Kunming 650200,China
摘要:
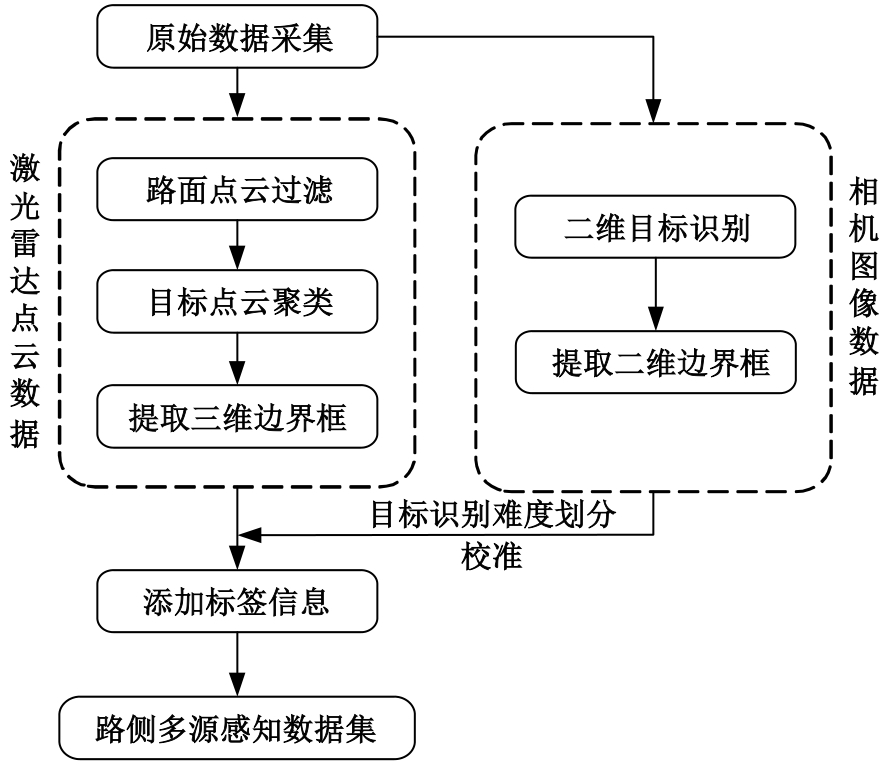
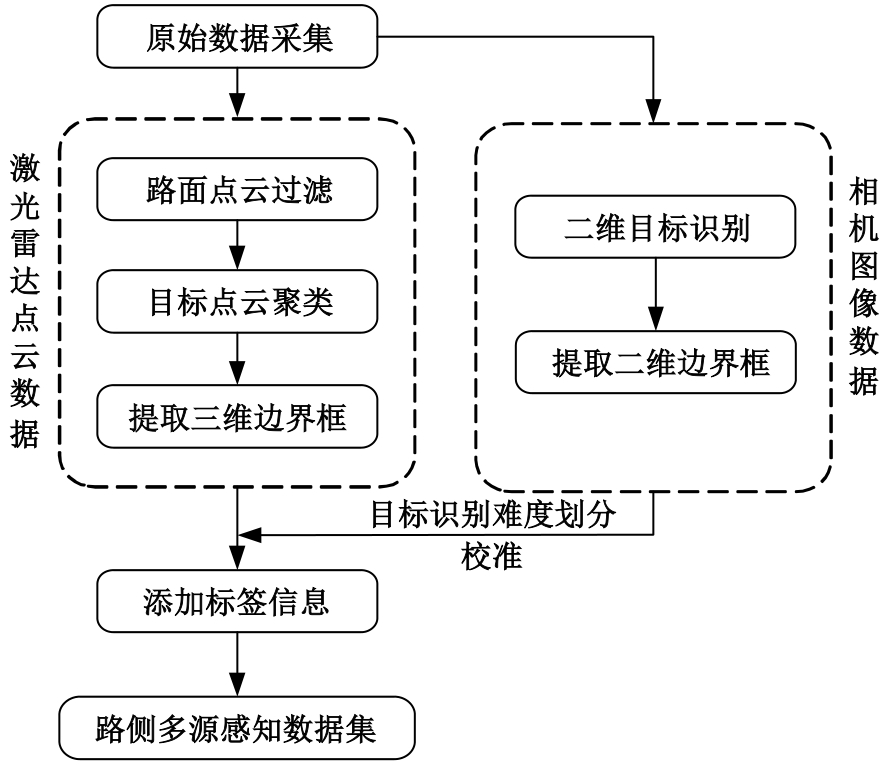
为满足路侧多源融合感知算法研究对标准公开数据的需求,提出一种路侧多源感知数据集规范化构建方法。在城市T型交叉口采集激光雷达和图像数据并进行时空匹配,提出包括道路空间划分、路面分割和激光点云聚类等步骤的车辆三维外形尺寸提取方法,提出涵盖目标过滤和分类、识别难度划分、三维边界框校准、标签信息补充等步骤的车辆标注方法,构建了昼夜条件下含有9 794个小汽车和重车标签的规范化路侧多源感知数据集;使用YOLOv5算法和PointRCNN算法对本文数据集的车辆二维和三维目标识别效果进行测试。测试结果表明:由于场景复杂度、采集设备以及车辆类型的差别,本文数据集与公开车载数据集中车辆平均激光点数量、车辆三维边界框尺寸方面存在明显差异;YOLOv5算法和PointRCNN算法对路侧多源感知数据集中的车辆目标具有与公开车载数据集相近的目标识别精度。
中图分类号:
- U495
| 1 | 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息, 2021, 21(5): 40-51. |
| Zhang Yi, Yao Dan-ya, Li Li, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. | |
| 2 | Geiger A, Lenz P, Urtasun R. Are we ready for autonomous driving? The KITTI vision benchmark suite[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Providence, USA, 2012: 3354-3361. |
| 3 | Chang M F, Lambert J, Sangkloy P, et al. Argoverse: 3D tracking and forecasting with rich maps[C]∥ IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 8740-8749. |
| 4 | Wang J, Fu T. TJRD TS [DB/OL]. [2023-04-22]. , 2021. |
| 5 | Ye X, Shu M, Li H Y, et al. Rope3D: the roadside perception dataset for autonomous driving and monocular 3D object detection task[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, USA, 2022: 21341-21350. |
| 6 | Lin C, Tian D, Duan X, et al. CL3D: camera-lidar 3D object detection with point feature enhancement and point-guided fusion[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 18040-18050. |
| 7 | 王新竹, 李骏, 李红建, 等. 基于三维激光雷达和深度图像的自动驾驶汽车障碍物检测方法[J]. 吉林大学学报: 工学版, 2016, 46(2): 360-365. |
| Wang Xin-zhu, Li Jun, Li Hong-jian, et al. Obstacle detection based on 3D laser scanner and range image for intelligent vehicle[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(2): 360-365. | |
| 8 | Wang Y, Chen X, You Y, et al. Train in Germany, test in the USA: making 3D object detectors generalize[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 11713-11723. |
| 9 | 中国汽车工程学会. 《智能网联汽车融合感知系统 第2部分:数据格式规范》标准立项[EB/OL]. [2023-04-22]. |
| 10 | Ester M, Kriegel H P, Sander J, et al. A density-based algorithm for discovering clusters in large spatial databases with noise[C]∥ Proceedings of 2nd International Conference on Knowledge Discovery and Data Mining, Portland, USA, 1996: 226-231. |
| 11 | Sun P, Kretzschmar H, Dotiwalla X, et al. Scalability in perception for autonomous driving: waymo open dataset[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 2443-2451. |
| 12 | Upesh N, Hossein E. Comparing YOLOV3, YOLOV4 and YOLOV5 for autonomous landing spot detection in faulty UAVs[J]. Sensors, 2022, 22(2): 2202464. |
| 13 | Zhao J, Xu H, Liu H, et al. Detection and tracking of pedestrians and vehicles using roadside lidar sensors[J]. Transportation Research Part C: Emerging Technologies, 2019, 100: 68-87. |
| 14 | Shi S S, Wang X G, Li H S. Pointrcnn: 3D object proposal generation and detection from point cloud[C]∥IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 770-779. |
| [1] | 杨楠,肖军. 序列二次规划算法下城市智能交通运行节能优化控制[J]. 吉林大学学报(工学版), 2024, 54(8): 2223-2228. |
| [2] | 张辉,温鑫,陈海宇,黄世淳. 基于激光测距传感器的车辆轨迹全息感知方法[J]. 吉林大学学报(工学版), 2024, 54(8): 2378-2384. |
| [3] | 李立,吴晓强,杨文臣,周瑞杰,汪贵平. 基于路侧毫米波雷达的群体车辆目标识别与跟踪[J]. 吉林大学学报(工学版), 2024, 54(7): 2104-2114. |
| [4] | 何永明,权聪,魏堃,冯佳,万亚楠,陈世升. 超高速公路车路协同路侧单元感知融合方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1923-1934. |
| [5] | 许清津,付锐,郭应时,吴付威. 载货汽车弯道侧翻路侧预测方法[J]. 吉林大学学报(工学版), 2024, 54(5): 1302-1310. |
| [6] | 杨秀建,贾晓寒,张生斌. 考虑汽车队列动态特性的混合交通流特性[J]. 吉林大学学报(工学版), 2024, 54(4): 947-958. |
| [7] | 程鑫,刘升贤,周经美,周洲,赵祥模. 融合密集连接和高斯距离的三维目标检测算法[J]. 吉林大学学报(工学版), 2024, 54(12): 3589-3600. |
| [8] | 傅丽芳,陈卓,敖长林. 基于分类和回归树决策树的网络大数据集离群点动态检测算法[J]. 吉林大学学报(工学版), 2023, 53(9): 2620-2625. |
| [9] | 康耀龙,冯丽露,张景安,曹素娥. 基于谱聚类的不确定数据集中快速离群点挖掘算法[J]. 吉林大学学报(工学版), 2023, 53(4): 1181-1186. |
| [10] | 高海龙,徐一博,侯德藻,王雪松. 基于深度异步残差网络的路网短时交通流预测算法[J]. 吉林大学学报(工学版), 2023, 53(12): 3458-3464. |
| [11] | 宋世军,樊敏. 基于谱聚类的多维数据集异常数据检测方法[J]. 吉林大学学报(工学版), 2023, 53(10): 2917-2922. |
| [12] | 高明华,杨璨. 基于改进卷积神经网络的交通目标检测方法[J]. 吉林大学学报(工学版), 2022, 52(6): 1353-1361. |
| [13] | 李雪梅,王春阳,刘雪莲,谢达. 基于SESTH的线性调频连续波激光雷达信号时延估计[J]. 吉林大学学报(工学版), 2022, 52(4): 950-958. |
| [14] | 田皓宇,马昕,李贻斌. 基于骨架信息的异常步态识别方法[J]. 吉林大学学报(工学版), 2022, 52(4): 725-737. |
| [15] | 车翔玖,陈赫元. 基于改进YOLOv4的多目标光盘检测算法[J]. 吉林大学学报(工学版), 2022, 52(11): 2662-2668. |
|
||