吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (7): 1923-1934.doi: 10.13229/j.cnki.jdxbgxb.20221225
• 交通运输工程·土木工程 • 上一篇
超高速公路车路协同路侧单元感知融合方法
何永明1,2( ),权聪1,2,魏堃3(),冯佳1,万亚楠1,陈世升1
),权聪1,2,魏堃3(),冯佳1,万亚楠1,陈世升1
- 1.东北林业大学 土木与交通学院,哈尔滨 150000
2.东北林业大学 工程咨询设计研究院有限公司,哈尔滨 150000
3.长安大学 道路结构与材料交通运输行业重点实验室,西安 710000
Perceptual fusion method of vehicle road cooperation roadside unit in superhighway
Yong-ming HE1,2(),Cong QUAN1,2,Kun WEI3(),Jia FENG1,Ya-nan WAN1,Shi-sheng CHEN1
- 1.College of Civil Engineering and Transportation,Northeast Forestry University,Harbin 150000,China
2.Engineering Consulting and Design Co. ,Ltd. ,Northeast Forestry University,Harbin 150000,China
3.Key Laboratory of Road Structure and Material Transportation Industry,Chang'an University,Xi'an 710000,China
摘要:
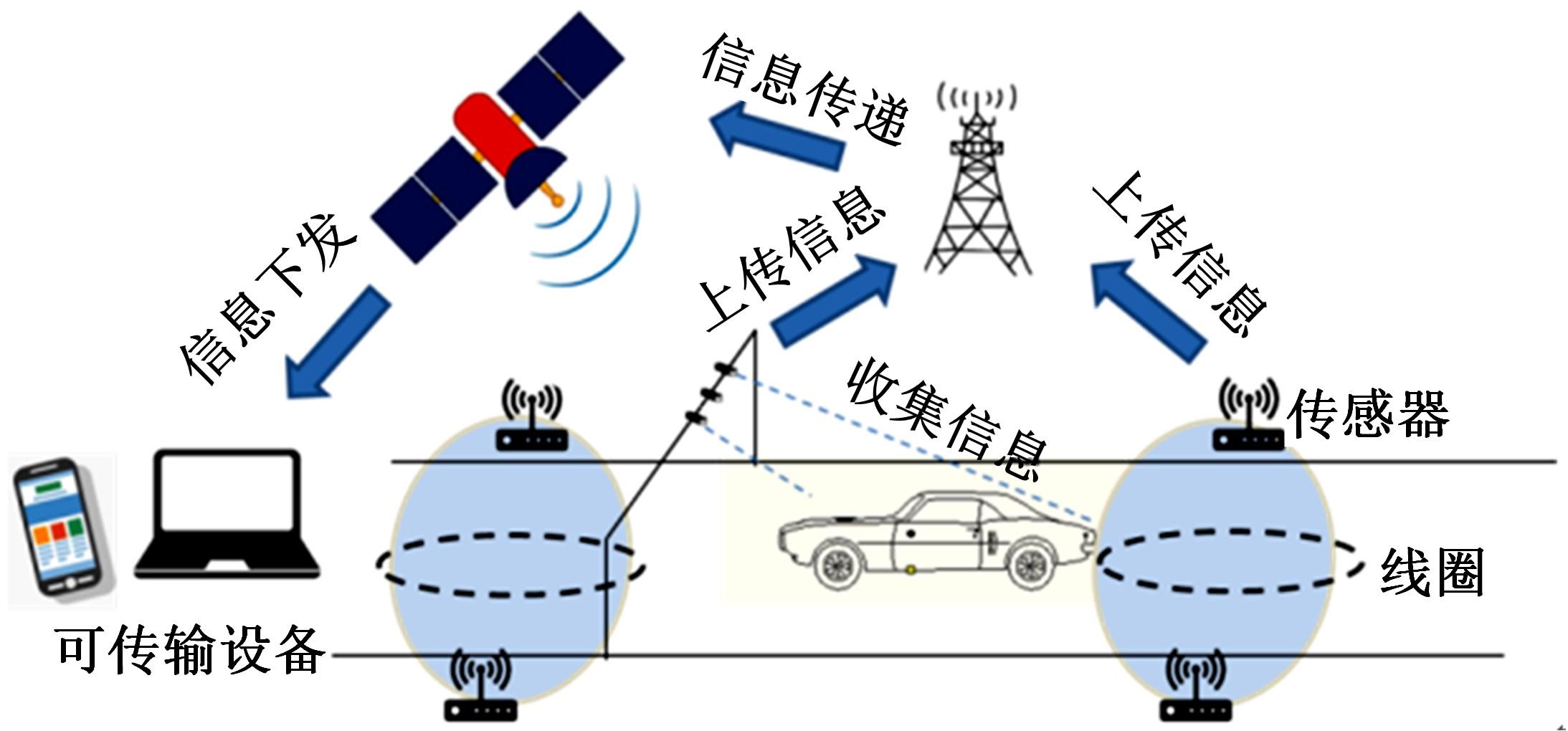
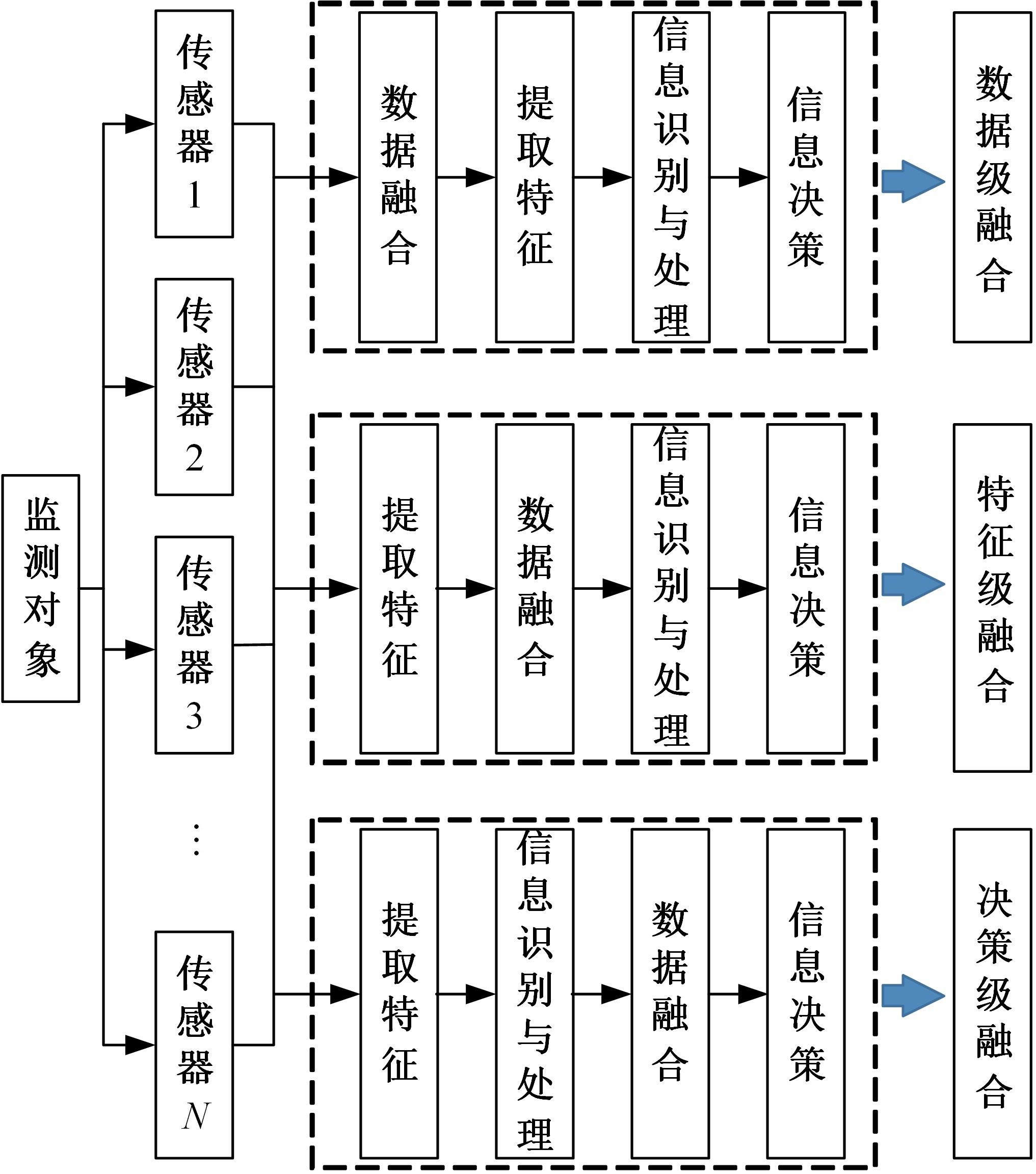
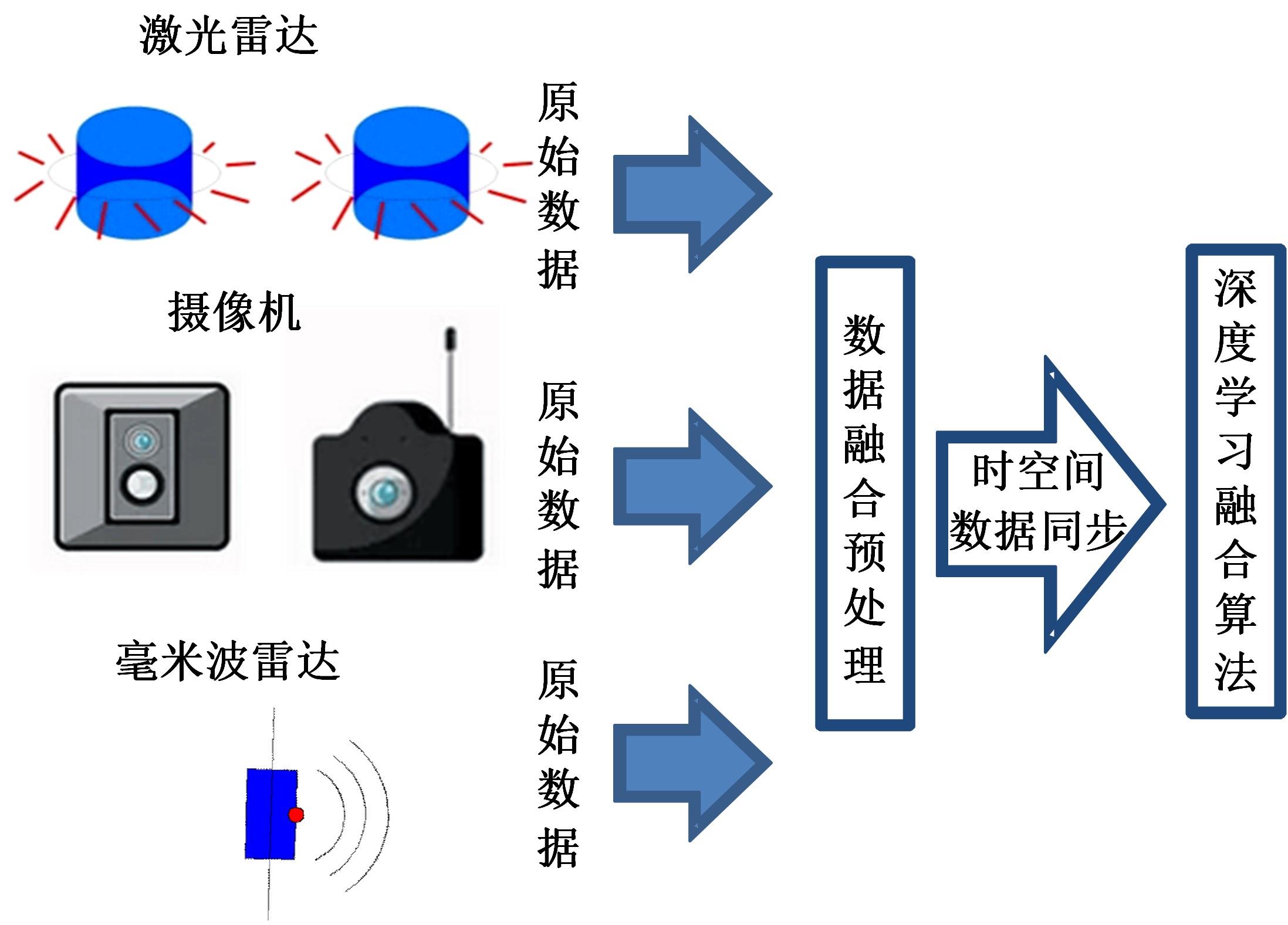
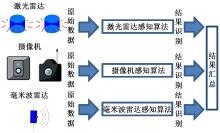
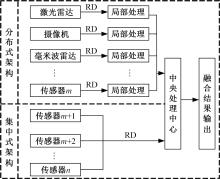
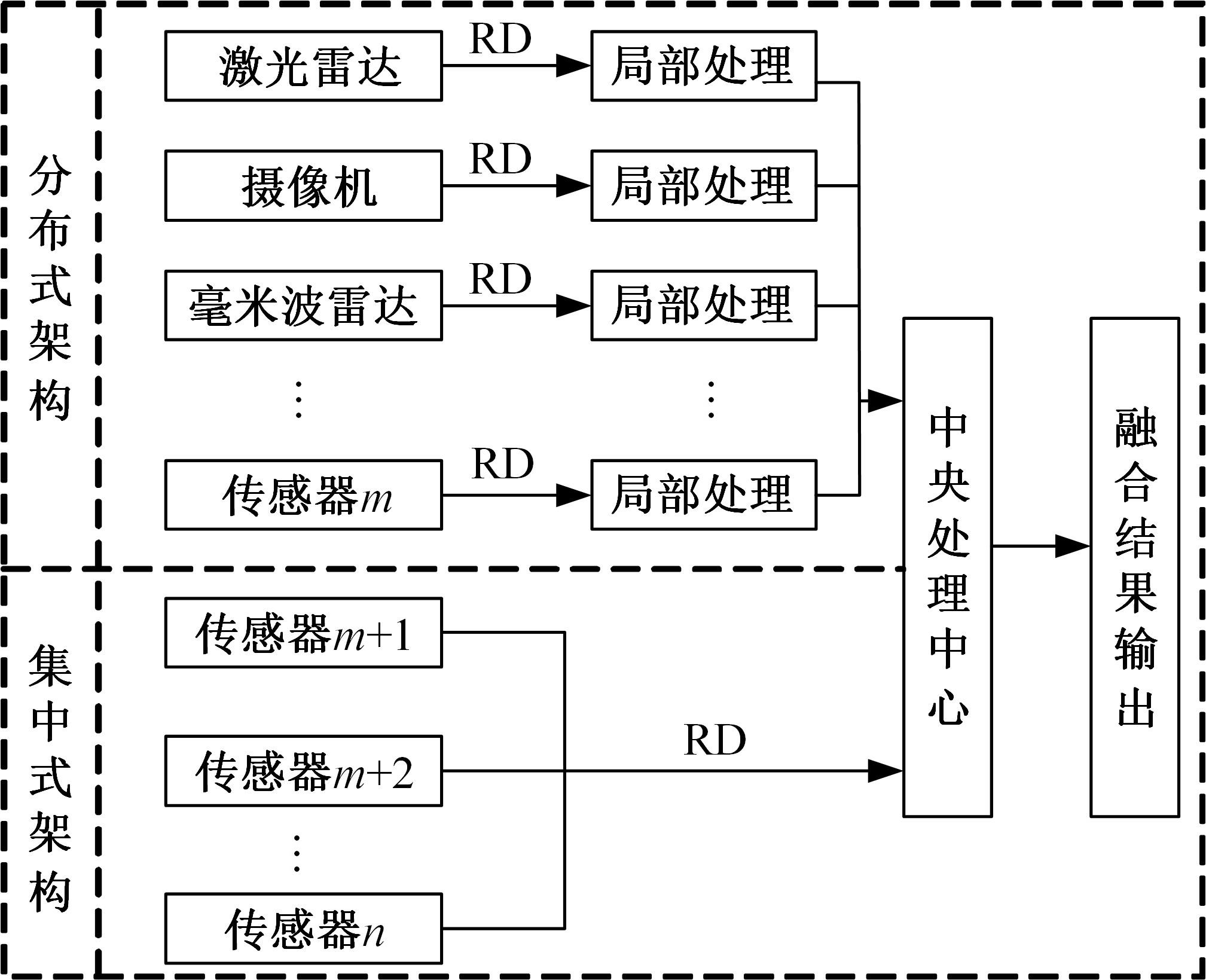
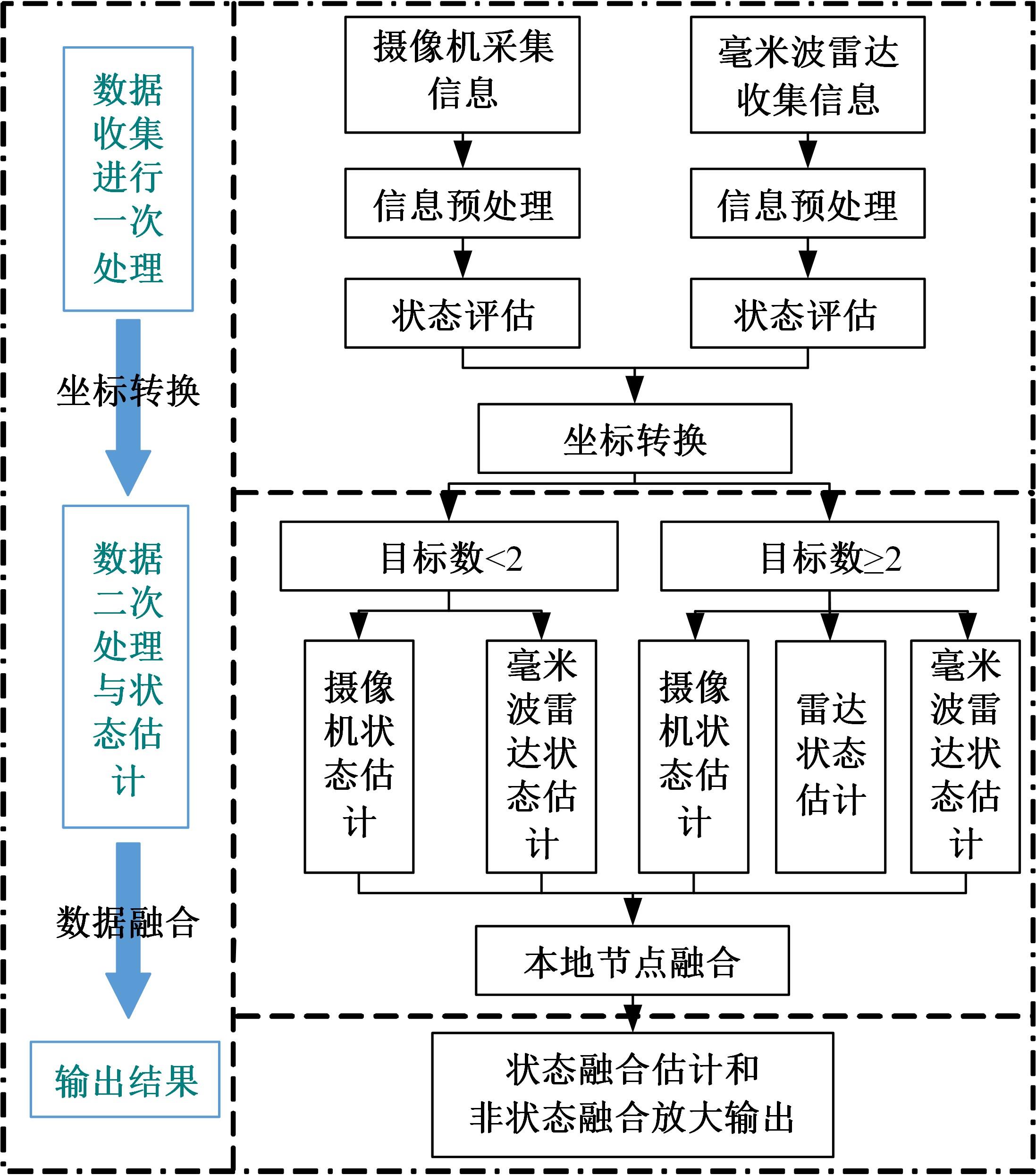
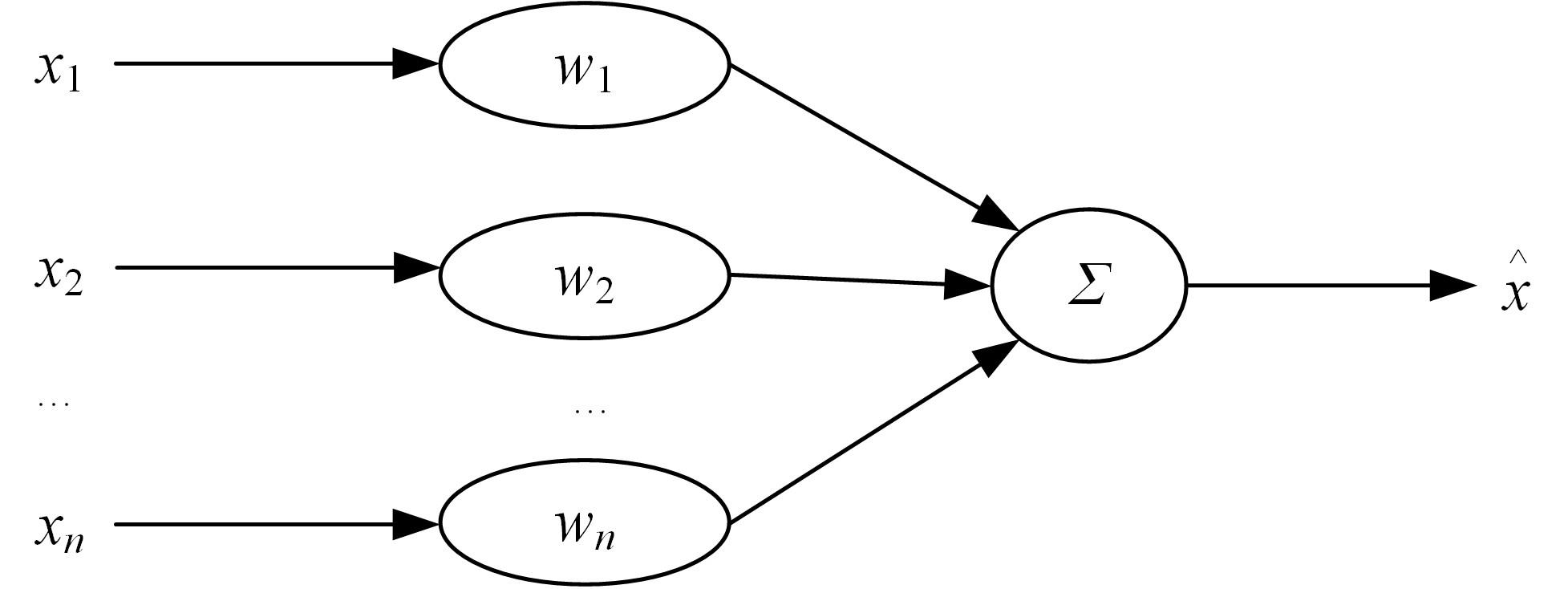
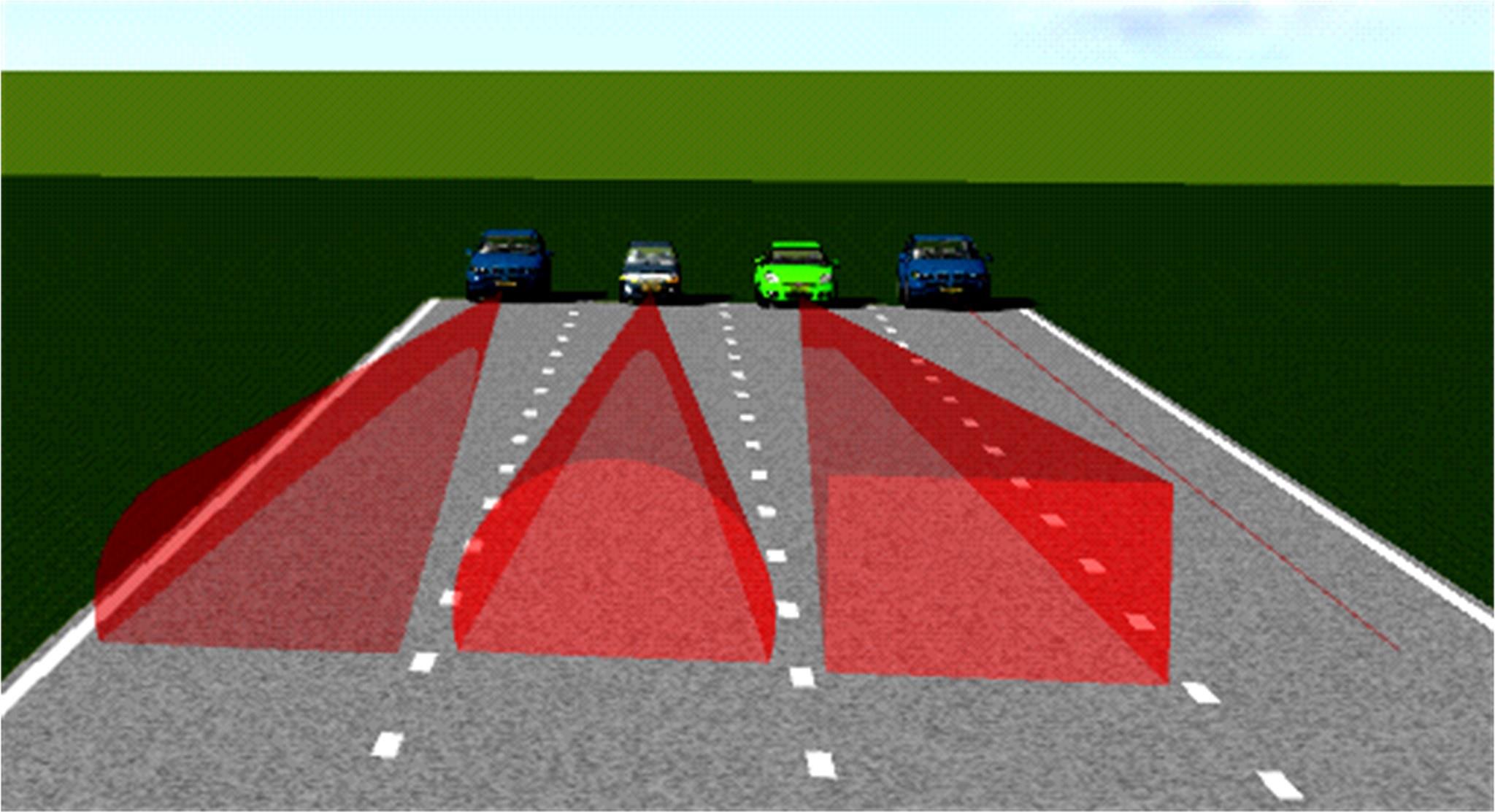
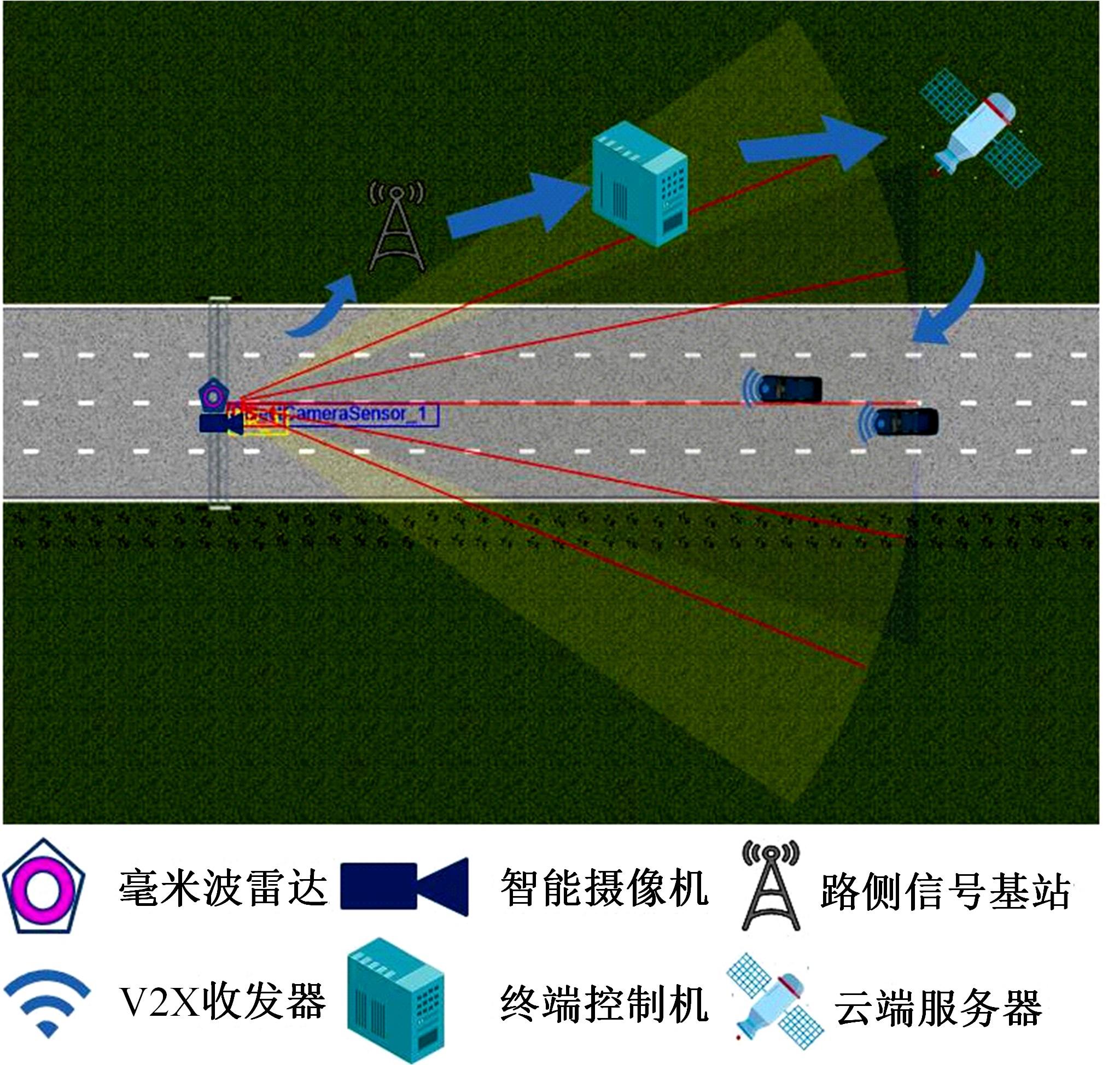
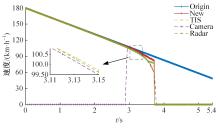
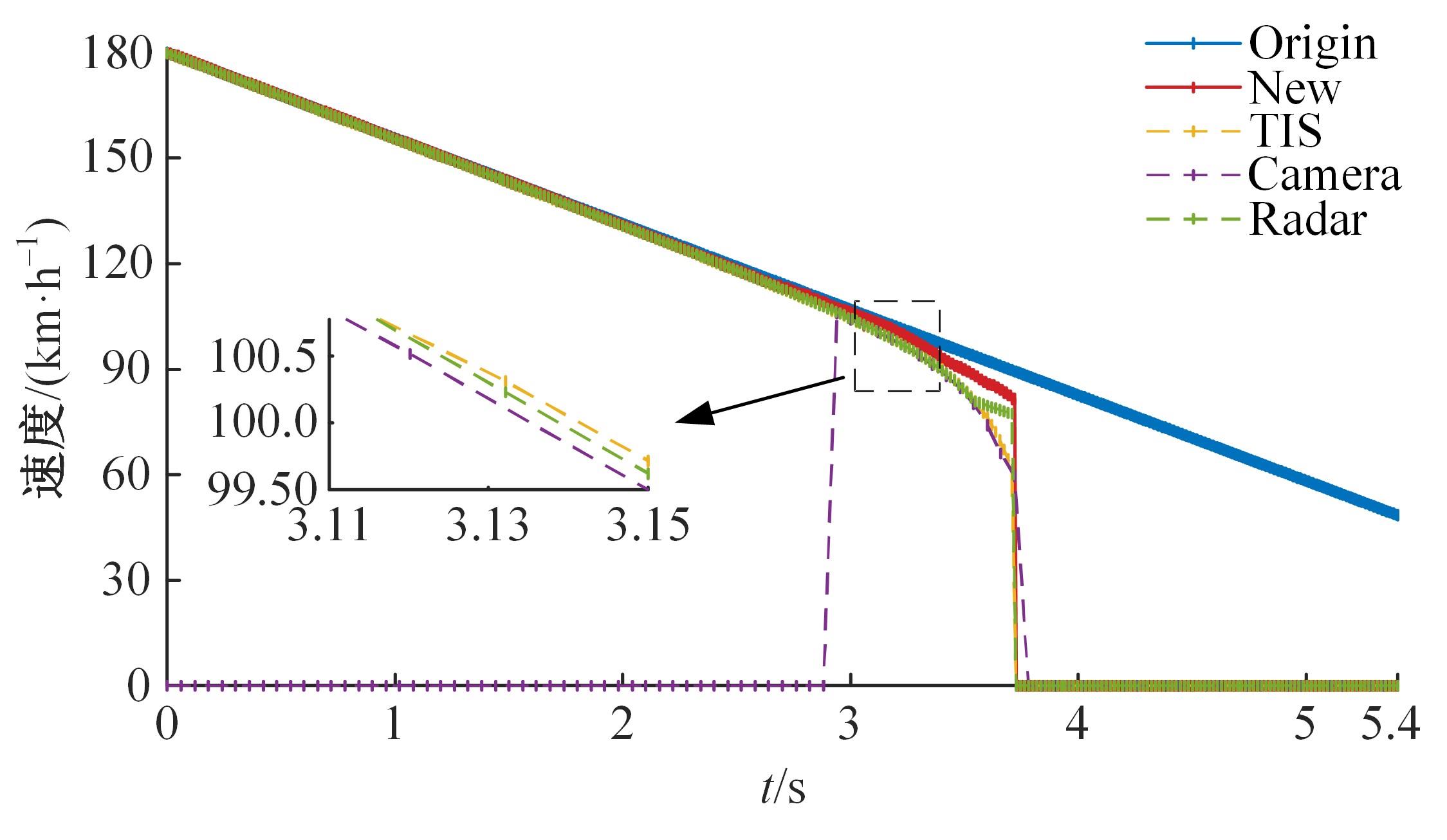
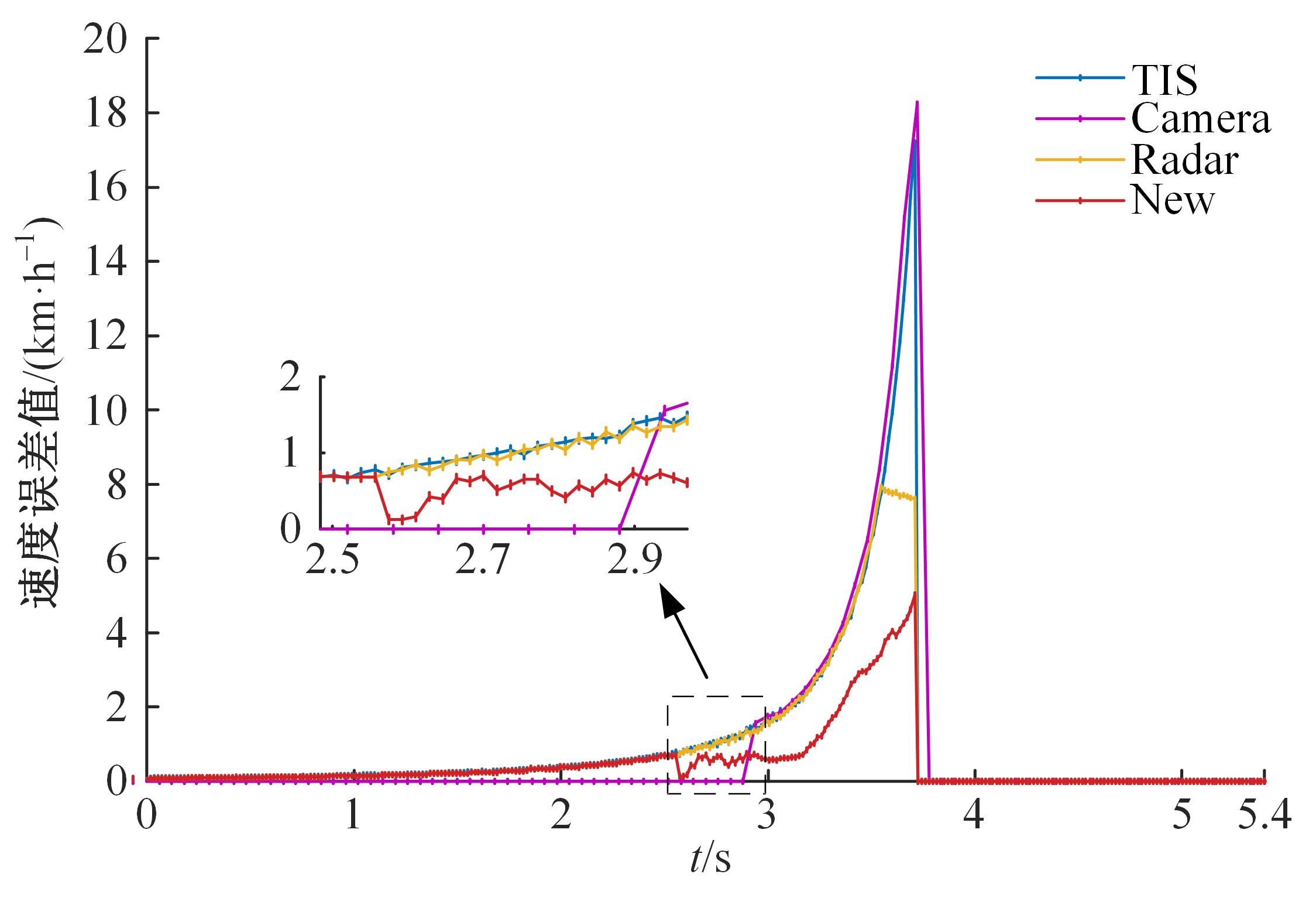
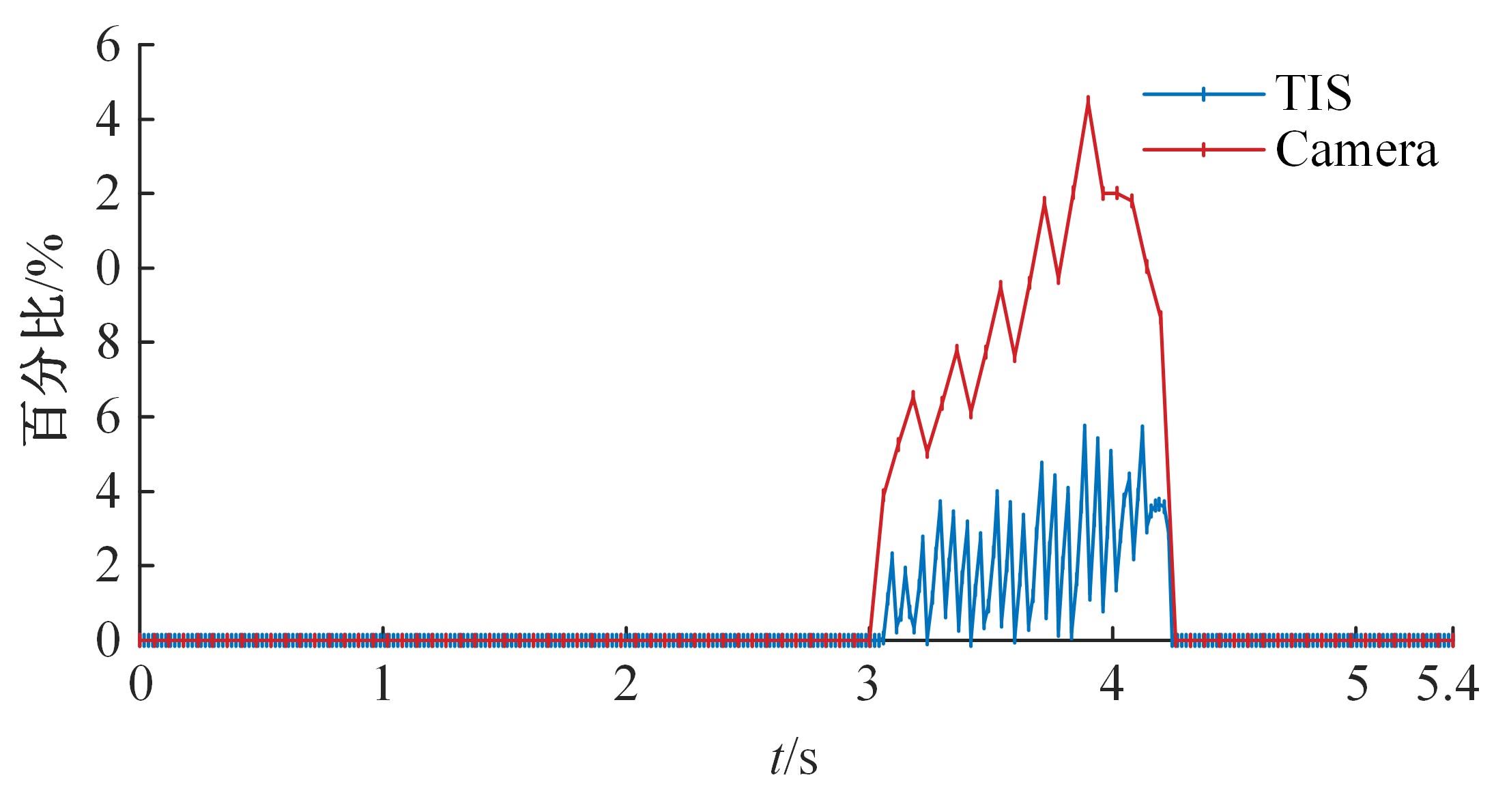
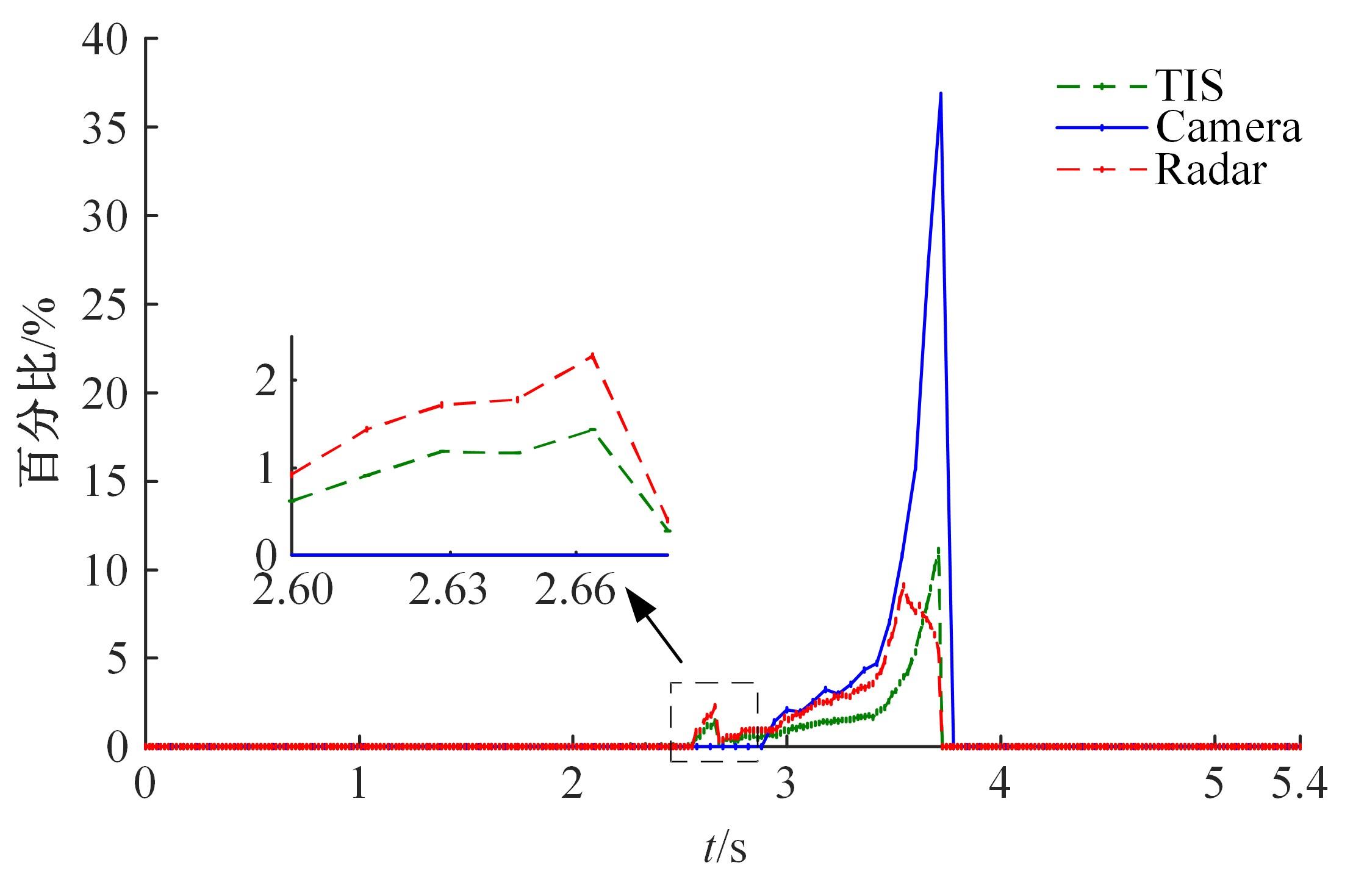
为提高超高速公路行车安全性,验证多传感器融合算法在超高速公路的可行性,从车路协同中路侧感知单元入手,利用PreScan建立了多传感器感知融合系统模型。该模型基于多传感器融合方法,通过了解多传感器融合方法的种类和架构,分析了不同方法的优缺点。采取混合式多传感器信息数据融合作为整体架构,采用后端式融合作为数据处理和分析的方式。该方法提高了超高速公路上传感器对目标距离和速度探测的精度,对Camera距离和速度的提升最大可分别达到7.2%和36.8%。研究结果表明,该方法提高了路侧单元检测能力,验证了自适应加权融合算法在超高速公路上的可行性和有效性。
中图分类号:
- U495









| 1 | 何永明, 裴玉龙. 超高速公路发展可行性论证与必要性研究[J]. 公路, 2016, 61(1): 158-162. |
| He Yong-ming, Pei Yu-long. Feasibility demonstration and necessity analysis on superhighway[J]. Highway, 2016, 61(1): 158-162. | |
| 2 | 何永明. 超高速公路安全保障与经济评价研究[D]. 哈尔滨: 东北林业大学交通学院, 2017. |
| He Yong-ming. Research safety support and economy evalution of superhighway[D]. Harbin: School of Traffic and Transportation, Northeast Forestry University, 2017. | |
| 3 | He Y M, Song Y T, Pei Y L, et al. Theoretical research on longitudinal profile design of superhighways[J]. Journal of Advanced Transportation, 2020, 2020(1): 1-14. |
| 4 | Pei Y L, He Y M, Ran B, et al. Horizontal alignment security design theory and application of superhighways[J]. Sustainability, 2020, 12(6): 33-47. |
| 5 | 何永明, 陈世升, 冯佳, 等. 基于高精地图的超高速公路虚拟轨道系统[J]. 吉林大学学报: 工学版, 2023, 53(7): 2016-2028. |
| He Yong-ming, Chen Shi-sheng, Feng Jia, et al. Superhighway virtual track system based on high precision map[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(7): 2016-2028.. | |
| 6 | 何永明, 冯佳, 权聪, 等. 超高速公路圆曲线加宽设计理论与应用研究[J]. 公路, 2022, 67(8): 44-49. |
| He Yong-ming, Feng Jia, Quan Cong, et al. Research on design theory and application of circular curve widening for superhighway[J]. Highway, 2022, 67(8): 44-49. | |
| 7 | 王云鹏, 鲁光泉, 于海洋. 车路协同环境下的交通工程[J]. 中国工程科学, 2018, 20(2): 106-110. |
| Wang Yun-peng, Lu Guang-quan, Yu Hai-yang. Traffic engineering considering cooperative vehicle infrastructure system[J]. Strategic Study of CAE, 2018, 20(2): 106-110. | |
| 8 | 李雪玮, 赵晓华, 李振龙, 等. 基于雾天高速车路协同模拟驾驶的驾驶人视觉信息加工模式[J]. 华南理工大学学报: 自然科学版, 2021, 49(3): 131-138, 148. |
| Li Xue-wei, Zhao Xiao-hua, Li Zhen-long, et al. Driver's visual information processing mode in foggy highway cooperative vehicle-infrastructure system environment based on simulated driving[J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(3): 131-138, 148. | |
| 9 | Ji H, Xie H, Liu Z. Research on urban traffic signal control methods under vehicle-road coordination environment[J]. Journal of Research in Science and Engineering, 2020, 2(10): 47-56. |
| 10 | Sovani S. Simulation accelerates development of autonomous driving[J]. ATZ Worldwide, 2017, 119(9): 36-47. |
| 11 | 王玉姣. 基于V2X的高速公路车路协同应用研究[J]. 智能城市, 2020, 6(20): 157-158. |
| Wang Yu-jiao. Research on vehicle road collaborative application of expressway based on V2X[J]. Intelligent City, 2020, 6(20): 157-158. | |
| 12 | 刘睿健.“协同”有道,“无人”驾成!——车路协同自动驾驶系统发展漫谈[J]. 中国交通信息化, 2020, 2020(10): 18-25. |
| Liu Rui-jian. "Synergy" has its way, and "nobody" can drive it!—discussion on the development of vehicle road cooperative automatic driving system[J]. China ITS Journal. 2020, 2020(10): 18-25. | |
| 13 | Moharm K I, Zidane E F, El-Mahdy M M, et al. Big data in ITS: concept, case studies, opportunities, and challenges[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(8): 3189-3194. |
| 14 | Jakub S, Anna S, Marina C. Multi-sensor data fusion and parallel factor analysis reveals kinetics of wood weathering[J]. The International Journal of Pure and Applied Analytical Chemistry, 2021, 18(7): 218-245. |
| 15 | Kennedy J O. Sensor data fusion for improving traffic mobility in smart cities[D]. Sheffield: Department of Automatic Control and Systems Engineering,University of Sheffield, 2020. |
| 16 | 李文钊. 基于多传感器数据融合的高速公路事件检测方法研究[D]. 重庆:重庆交通大学信息科学与工程学院, 2018. |
| Li Wen-zhao. Research on expressway event detectionbased on multi-sensor data fusion[D]. Chongqing: School of Information Science and Engineering, Chongqing Jiaotong University, 2018. | |
| 17 | 安鑫, 蔡伯根, 上官伟. 车路协同路侧感知融合方法的研究[J]. 测控技术, 2022, 41(2): 1-12, 35. |
| An Xin, Cai Bo-gen, Shang Guan-wei. Vehicle road cooperative roadside perception fusion method[J]. Measurement & Control Technology, 2022, 41(2): 1-12, 35. | |
| 18 | 方文杰. 基于CSI幅度信息和相位信息的室内定位技术研究[D]. 南京: 南京邮电大学通信与信息工程学院, 2021. |
| Fang Wen-jie. Key research on csi based indoor localization technology using amplitude and phase information[D]. Nanjing: School of Communications and Information Engineering, Nanjing University of Posts and Telecommunications, 2021. | |
| 19 | 吕继亮. 基于多传感器信息融合的无人小车避障算法研究[D]. 广州:华南理工大学机械与汽车工程学院, 2020. |
| Lv Ji-liang. Research on obstacle avoidance algorithm of unmanned vehicle based on multi-sensor information fusion[D]. Guangzhou: School of Mechanical & Automotive Engineering, South China University of Technology, 2020. | |
| 20 | 金红新, 杨涛, 王小刚, 等. 多传感器信息融合理论在无人机相对导航中的应用[J]. 国防科技大学学报, 2017, 39(5): 90-95. |
| Jin Hong-xin, Yang Tao, Wang Xiao-gang, et al. Application of multi-sensor information fusion in UAV relative navigation method[J]. Journal of National University of Defense Technology, 2017, 39(5): 90-95. | |
| 21 | Liu P F, Yu G Z, Wang Z Y, et al. Object classification based on enhanced evidence theory: radar-vision fusion approach for roadside application[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71(1): 1-12. |
| 22 | Li A J, Chen Z H, Ning D H, et al. Front vehicle detection based on improved fusion method for lidar and visual image[J]. Proceedings of the Institution of Mechanical Engineers Part D—Journal of Automobile Engineering, 2022, 188(10): 67-78. |
| 23 | 陈磊, 王江锋, 谷远利, 等. 基于思维进化优化的多源交通数据融合算法[J]. 吉林大学学报: 工学版, 2019, 49(3): 705-713. |
| Chen Lei, Wang Jiang-feng, Gu Yuan-li, et al. Multi-source traffic data fusion algorithm based onmind evolutionary algorithm optimization[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(3): 705-713. | |
| 24 | 邓淇天. 基于激光雷达和视觉传感器融合的障碍物识别技术研究[D]. 南京: 东南大学仪器科学与工程学院, 2019. |
| Deng Qi-tian. Research on object recognition based on lidar and camera fusion[D]. Nanjing: School of Instrument Science Engineering, Southeast University, 2019. |
| [1] | 程国柱,盛林,王浩宇,冯天军. 考虑右转车二次冲突的信号交叉口行人过街安全评价方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1903-1912. |
| [2] | 许清津,付锐,郭应时,吴付威. 载货汽车弯道侧翻路侧预测方法[J]. 吉林大学学报(工学版), 2024, 54(5): 1302-1310. |
| [3] | 秦雅琴,钱正富,谢济铭. 协同换道避障模型和轨迹数据驱动的车辆协同避障策略[J]. 吉林大学学报(工学版), 2024, 54(5): 1311-1322. |
| [4] | 张明业,杨敏,黎彧,黄世玉,李清韵. 考虑有序充电策略的多车型电动公交调度优化[J]. 吉林大学学报(工学版), 2024, 54(5): 1293-1301. |
| [5] | 胡钊政,孙勋培,张佳楠,黄戈,柳雨婷. 基于时空图模型的车-路-图协同定位方法[J]. 吉林大学学报(工学版), 2024, 54(5): 1246-1257. |
| [6] | 涂辉招,王万锦,乔鹏,郭静秋,鹿畅,吴海飞. 自动驾驶卡车路测安全员接管干预行为解析[J]. 吉林大学学报(工学版), 2024, 54(3): 727-740. |
| [7] | 马潇驰,陆建. 基于基因表达式编程的高架道路事故实时预测[J]. 吉林大学学报(工学版), 2024, 54(3): 719-726. |
| [8] | 严利鑫,冯进培,郭军华,龚毅轲. 不同险态情景下共驾型智能车辆接管行为特征分析[J]. 吉林大学学报(工学版), 2024, 54(3): 683-691. |
| [9] | 曲大义,张可琨,顾原,王韬,宋慧,戴守晨. 自动驾驶车辆换道决策行为分析及分子动力学建模[J]. 吉林大学学报(工学版), 2024, 54(3): 700-710. |
| [10] | 张健,李青扬,李丹,姜夏,雷艳红,季亚平. 基于深度强化学习的自动驾驶车辆专用道汇入引导[J]. 吉林大学学报(工学版), 2023, 53(9): 2508-2518. |
| [11] | 郑植,袁佩,金轩慧,魏思斯,耿波. 桥墩复合材料柔性防撞护舷试验[J]. 吉林大学学报(工学版), 2023, 53(9): 2581-2590. |
| [12] | 李建华,王泽鼎. 考虑路径耗时的城市汽车分布式充电桩选点规划[J]. 吉林大学学报(工学版), 2023, 53(8): 2298-2303. |
| [13] | 李洪涛,王琳虹,李俊达. 公路交叉口照明和限速对视觉搜索能力的影响[J]. 吉林大学学报(工学版), 2023, 53(8): 2287-2297. |
| [14] | 巫威眺,曾坤,周伟,李鹏,靳文舟. 基于多源数据和响应面优化的公交客流预测深度学习方法[J]. 吉林大学学报(工学版), 2023, 53(7): 2001-2015. |
| [15] | 程国柱,盛林,赵浩,冯天军. 基于危险度分析的信号交叉口专用相位设置条件[J]. 吉林大学学报(工学版), 2023, 53(7): 1962-1969. |
|
||