吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (4): 1142-1162.doi: 10.13229/j.cnki.jdxbgxb.20230920
真实与虚拟场景下自动驾驶车辆的主动安全性验证与确认综述
高镇海1( ),郑程元2,赵睿2()
),郑程元2,赵睿2()
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
2.吉林大学 汽车工程学院,长春 130022
Review of active safety verification and validation for autonomous vehicles in real and virtual scenarios
Zhen-hai GAO1(),Cheng-yuan ZHENG2,Rui ZHAO2()
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.College of Automotive Engineering,Jilin University,Changchun 130022,China
摘要:
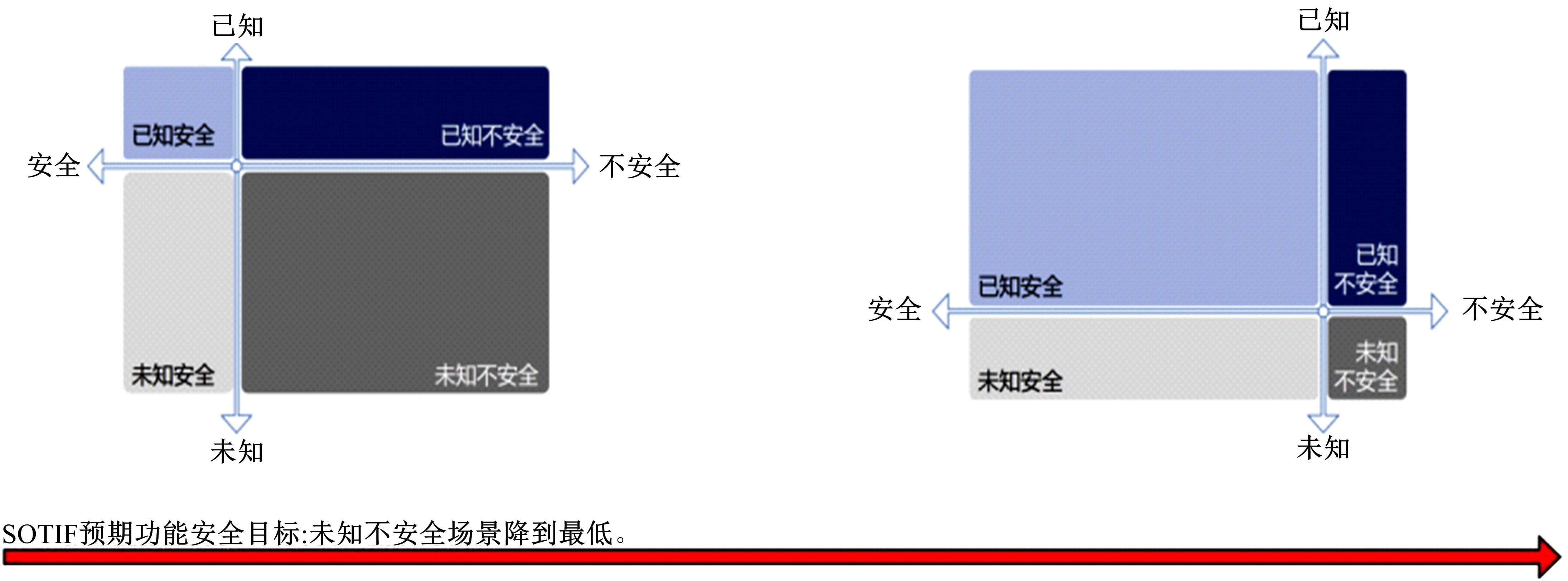
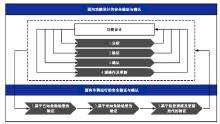
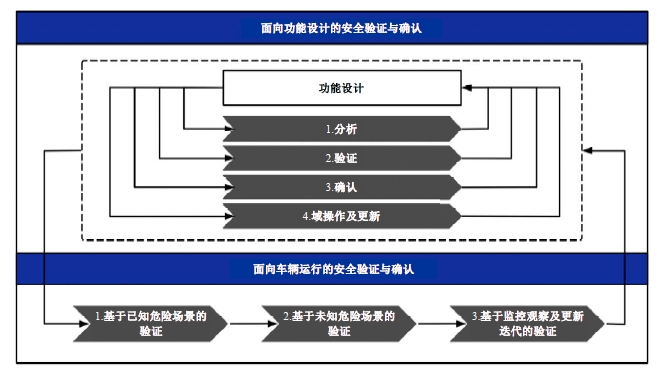
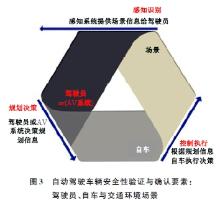
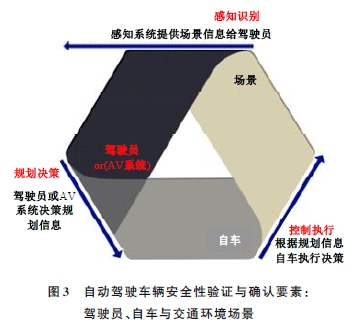
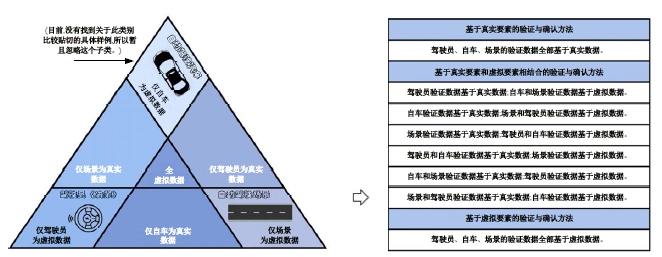
首先,概述了自动驾驶车辆安全性验证和确认的流程以及标准法规,基于人-车-路系统理论进一步提出一个新的分类方法,分类综述当前自动驾驶车辆安全性的验证和确认技术与评估标准。其次,对基于真实场景的验证和确认方法、基于虚拟场景的验证和确认方法,以及基于真实场景和虚拟场景相结合的验证和确认方法进行了归纳总结与对比解析,从8个特性维度对16种验证和确认方法的局限性和优缺点进行比较和评估。最后,对自动驾驶车辆安全验证和确认方案研究所面临的挑战和未来机遇进行简短的引申。
中图分类号:
- U495



| [1] | 刘新. 工信部: 规范智能网联汽车道路测试与示范应用[J]. 中国设备工程, 2021(16): 1. |
| Liu Xin. Ministry of Industry and Information Technology: regulating road testing and demonstration of intelligent connected vehicles[J]. China Equipment Engineering, 2021(16): 1. | |
| [2] | Ho S S. Complementary and competitive framing of driverless cars: framing effects, attitude volatility, or attitude resistance?[J]. International Journal of Public Opinion Research, 2021, 33(3): 512-531. |
| [3] | Yurtsever E, Lambert J, Carballo A, et al. A survey of autonomous driving: common practices and emerging technologies[J]. IEEE Access, 2020, 8: 58443-58469. |
| [4] | Koopman P, Wagner M. Autonomous vehicle safety: an interdisciplinary challenge[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(1): 90-96. |
| [5] | 暴爽, 李丽香, 彭海朋. 智能车联网信息安全研究[J]. 信息安全与通信保密, 2023(3): 10-20. |
| Bao Shuang, Li Li-xiang, Peng Hai-peng. Research on information security in intelligent internet of vehicles [J]. Information Security and Communications Privacy, 2023(3): 10-20. | |
| [6] | 董友建, 周文华. 关于人工智能的一些科技伦理问题——从“阿尔法狗”谈起[C]∥云南省第4、5届科学技术哲学与科学技术史研究生论坛优秀论文集, 中国, 昆明, 2015: 178-185. |
| [7] | .International Standard Organization Road Vehicles-Safety of the Intended Functionality [S]. |
| [8] | Chen L, Jiao J, Zhao T. A novel hazard analysis and risk assessment approach for road vehicle functional safety through integrating STPA with FMEA[J]. Applied Sciences, 2020, 10: No. 7400. |
| [9] | Wachenfeld W, Winner H. The release of autonomous vehicles[J]. Autonomous Driving: Technical, Legal and Social Aspects, 2016(5): 425-449. |
| [10] | ,Road vehicles—Safety and cybersecurity for automated driving systems—Design, verification and validation [S]. |
| [11] | 张鑫. 基于卡车行驶数据的驾驶行为分析评价系统研究[D].天津:天津大学机械工程学院, 2021. |
| Zhang Xin. Research on driving behavior analysis and evaluation system based on truck driving data[D].Tianjin: School of Mechanical Engineering, Tianjin University, 2021. | |
| [12] | 方一格. 基于续驶里程及安全性能的电池包轻量化设计[D]. 长沙: 湖南大学机械与运载工程学院, 2021. |
| Fang Yi-ge. Lightweight design of battery pack based on driving range and safety performance[D]. Changsha: School of Mechanical and Vehicle Engineering, Hunan University, 2021. | |
| [13] | 涂辉招, 崔航, 鹿畅, 等. 面向自动驾驶路测驾驶能力评估的避险脱离率模型[J]. 同济大学学报: 自然科学版, 2020, 48(11): 8-16. |
| Tu Hui-zhao, Cui Hang, Lu Chang, et al. Evasion disengagement rate model for assessing driving capability in autonomous road testing [J]. Journal of Tongji University(Natural Science), 2020, 48(11): 8-16. | |
| [14] | 王慧然. 基于预期功能安全的自动驾驶汽车换道控制关键技术研究[D]. 合肥:合肥工业大学汽车与交通工程学院, 2021. |
| Wang Hui-ran. Research on key technologies of lane change control of autonomous vehicles based on expected functional safety[D]. Hefei: School of Automotive and Traffic Engineering, Hefei University of Technology, 2021. | |
| [15] | 夏春艳, 黄松, 郑长友, 等. 自动驾驶交叉路口测试场景建模及验证方法[J]. 软件学报, 2023, 34(7):3002-3021. |
| Xia Chun-yan, Huang Song, Zheng Chang-you, et al. Modeling and verification methods of autonomous driving intersection test scenarios [J]. Journal of Software, 2023, 34(7): 3002-3021. | |
| [16] | 王殿林. 自动在线规约挖掘技术研究[D]. 长沙:国防科学技术大学研究生院, 2011. |
| Wang Dian-lin. Research on automatic online protocol mining technology[D]. Changsha: Graduate School of National University of Defense Technology, 2011. | |
| [17] | Pek C, Manzinger S, Koschi M, et al. Using online verification to prevent autonomous vehicles from causing accidents[J]. Nature Machine Intelligence, 2020(9): 518-528. |
| [18] | 中华人民共和国国家标准. 质量管理体系基础和术语[J]. 质量春秋, 2009(6): 12. |
| Standardization Administration of China. Fundamentals and vocabulary of quality management systems [J]. Quality Spring and Autumn, 2009(6): 12. | |
| [19] | 高雅, 朱西产. L3级自动驾驶系统安全认证方法[J].佳木斯大学学报:自然科学版, 2022, 40(3): 46-49. |
| Gao Ya, Zhu Xi-chan. Safety certification method for L3-level autonomous driving systems[J]. Journal of Jiamusi University(Natural Science Edition), 2022, 40(3): 46-49. | |
| [20] | 刘佳熙, 郭辉, 李君. 汽车电子电气系统的功能安全标准ISO26262[J]. 上海汽车, 2011(10): 57-61. |
| Liu Jia-xi, Guo Hui, Li Jun. Functional safety standard ISO 26262 for automotive electrical and electronic systems[J]. Shanghai Automobile, 2011(10): 57-61. | |
| [21] | 赵晨熙. 《道路交通安全法》大修[J]. 人民交通, 2021(10): 54-56. |
| Zhao Chen-xi. Major revision of the Road Traffic Safety Law[J]. People's Transportation, 2021(10): 54-56. | |
| [22] | Leung K, Schmerling E, Zhang M, et al. On infusing reachability-based safety assurance within planning frameworks for human-robot vehicle interactions[J]. The International Journal of Robotics Research, 2020, 39(10/11): 1326-1345. |
| [23] | 叶强. 德国自动驾驶立法评析[J]. 国外社会科学, 2022(2): 73-86, 197. |
| Ye Qiang. Review of legislation on autonomous driving in Germany [J]. Foreign Social Sciences, 2022(2): 73-86, 197. | |
| [24] | Small M M, Johnston I. Lane keeping systems for light vehicles: draft ADR 107/00[R]. Canberra: Australasian College of Road Safety, 2022. |
| [25] | Tenbrock A, König A, Keutgens T, et al. The conscend dataset: concrete scenarios from the highd dataset according to alks regulation unece r157 in openx[C]∥IEEE Intelligent Vehicles Symposium Workshops, Beijing, 2021: 174-181. |
| [26] | T/ . 自动驾驶汽车试验道路技术标准[S]. |
| [27] | 李沛盈. 《关于加强智能网联汽车生产企业及产品准入管理的意见》解读与应对[J]. 网络安全和信息化, 2021(9): 47. |
| Li Pei-ying. Interpretation and response to the opinions on strengthening the access management of intelligent connected vehicle manufacturers and products[J]. Cybersecurity and Informatization, 2021(9): 47. | |
| [28] | . 机动车运行安全技术条件 [S]. |
| [29] | 张行, 孙航. GB/T 40429—2021《汽车驾驶自动化分级》分析[J]. 中国汽车, 2022(5): 3-5, 7. |
| Zhang Xing, Sun Hang. Analysis of GB/T 40429—2021 classification of driving automation for vehicles [J]. China Auto, 2022(5): 3-5, 7. | |
| [30] | 孙航, 张路, 季国田. 智能网联汽车标准体系及重点标准研究与展望[J]. 汽车安全与节能学报, 2024,15(6): 795-812. |
| Sun Hang, Zhang Lu, Ji Guo-tian. Research and prospects of the standard system and key standards for intelligent connected vehicles[J]. Journal of Automotive Safety and Energy, 2024, 15(6): 795-812. | |
| [31] | SAE J3016_201401, Taxonomy and definitions for terms related to on-road motor vehicle automated driving systems [S]. |
| [32] | Riedmaier S, Ponn T, Ludwig D, et al. Survey on scenario-based safety assessment of automated vehicles[J]. IEEE Access, 2020, 8: 87456-87477. |
| [33] | Koopman P. UL 4600: What to include in an autonomous vehicle safety case[J]. Computer, 2023, 56(5): 101-104. |
| [34] | International SAE. SAE international releases updated J3018™ Standard for On-Road Testing of SAE Level 3, 4 and 5 Prototype Automated Driving System (ADS)[R]. Warrendale: Newswire P, 2019. |
| [35] | Forest Thomas M. Cybersecurity Guidebook for Cyber-Physical Vehicle Systems[M]. New York:SAE International, 2016. |
| [36] | van Den Berg J, Ferguson D, Kuffner J. Anytime path planning and replanning in dynamic environments[C]∥Proceedings of IEEE International Conference on Robotics and Automation, Shanghai, China, 2006: 2366-2371. |
| [37] | Schmidt C, Oechsle F, Branz W. Research on trajectory planning in emergency situations with multiple objects[C]∥IEEE Intelligent Transportation Systems Conference, Toranto, Canada, 2006: 988-992. |
| [38] | BMVI. Germany will be the World Leader in Autonomous Driving[R]. Federal Ministry of Transport and Digital Infrastructure, Germany, 2021. |
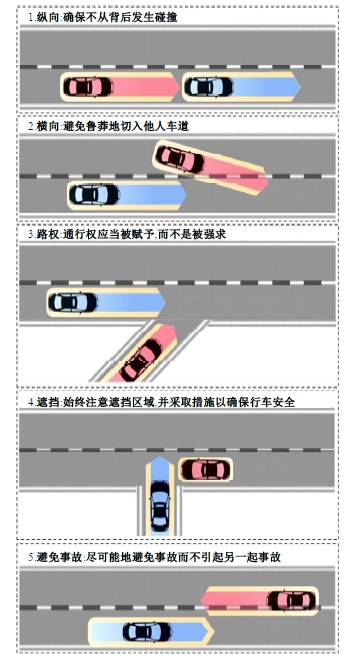
| [39] | Shalev-Shwartz S, Shammah S, Shashua A. On a formal model of safe and scalable self-driving cars[J/OL].[2023-08-22]. . |
| [40] | Wang X, Liu X, Zhong F, et al. A scenario generation method for typical operations of power systems with pv integration considering weather factors[J]. Sustainability, 2023, 15(20): No.15007. |
| [41] | Shalev-Shwartz S, Shammah S, Shashua A. On a formal model of safe and scalable self-driving cars[J/OL].[2023-08-22]. . |
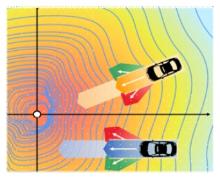
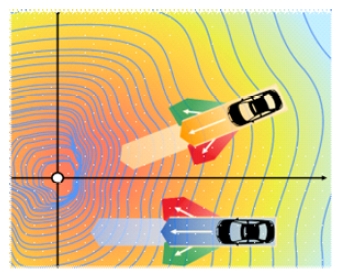
| [42] | David N, Hon-Leung L, Ng Julia, et al. An Introduction to the Safety Force Field[M]. City of Santa Clara: NVIDIA Corporation, 2019. |
| [43] | 电子发烧友网. 自动驾驶的关键技术有哪些?[EB/OL]. [2023-08-22].. |
| [44] | 梁耘瀚, 张慧珺, 刘斌, 等. 驾驶员弯道操纵能力实车测试与分析方法研究[J]. 汽车技术, 2022(6): 47-54. |
| Liang Yun-han, Zhang Hui-jun, Liu Bin, et al. Experimental testing and analysis method of driver's cornering operation ability [J]. Automotive Technology, 2022(6): 47-54. | |
| [45] | Zhang Y, Lu S, Yang Y, et al. Internet-distributed vehicle-in-the-loop simulation for HEVs[J]. IEEE Transactions on Vehicular Technology, 2018, 67(5):3729-3739. |
| [46] | 刘俊, 郭洪艳, 戴启坤, 等. 基于驾驶员在环实验的人车协同转向控制器评价方法[P]. 中国: CN111752168A, 2025-03-28. |
| [47] | 王孝鹏, 吴龙. 车辆动力学建模与仿真[M]. 成都: 西南交通大学出版社, 2020. |
| [48] | 朱冰, 张培兴, 赵健, 等. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32(6): 1-19. |
| Zhu Bing, Zhang Pei-xing, Zhao Jian, et al. Research progress of scenario-based virtual testing for autonomous vehicles[J]. China Journal of Highway and Transport, 2019,32(6): 1-19. | |
| [49] | Xu X, Wang X, Wu X, et al. Calibration and evaluation of the responsibility-sensitive safety model of autonomous car-following maneuvers using naturalistic driving study data[J]. Transportation Research Part C: Emerging Technologies, 2021, 123:No.102988. |
| [50] | Strauss M, Mitsch S. Slow down, move over: a case study in formal verification, refinement, and testing of the responsibility-sensitive safety model for self-driving cars[C]∥The 17th International Conference on Tests and Proofs,Leicester, UK, 2023: 149-167. |
| [51] | Wang X, Ye C, Quddus M, et al. Pedestrian safety in an automated driving environment: calibrating and evaluating the responsibility-sensitive safety model[J]. Accident Analysis and Prevention, 2023, 192: No.107265. |
| [52] | Suk H, Kim T, Park H, et al. Rationale-aware autonomous driving policy utilizing safety force field implemented on CARLA simulator[J/OL].[2023-08-22]. . |
| [53] | Ji X, Cui X, Li Z, et al. Research and evaluation of the allosteric protein-specific force field based on a pre-training deep learning model[J]. Journal of Chemical Information and Modeling, 2023, 63(8):2456-2468. |
| [54] | 刘秀芳, 曹凯, 杨旭, 等. 基于可达集的自主车辆安全性验证方法[J]. 广西大学学报: 自然科学版, 2018, 43(2): 488-497. |
| Liu Xiu-fang, Cao Kai, Yang Xu, et al. Safety verification method for autonomous vehicles based on reachable sets[J]. Journal of Guangxi University (Natural Science Edition), 2018, 43(2): 488-497. | |
| [55] | Althoff M, Frehse G, Girard A. Set propagation techniques for reachability analysis[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2021, 4(1): 369-395. |
| [56] | Wetzlinger M, Kulmburg A, Althoff M. Adaptive parameter tuning for reachability analysis of nonlinear systems [C]∥Proceedings of the 24th International Conference on Hybrid Systems, Nashville Tennessee, USA, 2021: 1-11. |
| [57] | Wetzlinger M, Kulmburg A, Le Penven A, et al. Adaptive reachability algorithms for nonlinear systems using abstraction error analysis[J]. Nonlinear Analysis: Hybrid Systems, 2022, 46: No.101252. |
| [58] | 邱锡鹏. 神经网络与深度学习[M]. 北京: 电子工业出版社, 2020: 448. |
| [59] | LeCun Y. 1.1 Deep learning hardware: past, present, and future[C]∥IEEE International Solid-State Circuits Conference-(ISSCC),San Francisco, USA, 2019: 12-19. |
| [60] | Ribeiro C, Pinto T, Silva M, et al. Data mining approach for decision support in real data based smart grid scenario[C]∥The 26th International Workshop on Database and Expert Systems Applications (DEXA), Valencia, Spain, 2015: 73-77. |
| [61] | Yang Y, Yuan Z, Meng R. Exploring traffic crash occurrence mechanism toward cross-area freeways via an improved data mining approach[J]. Journal of Transportation Engineering, Part A: Systems, 2022, 148(9): No.04022052. |
| [62] | Yichao Z, Zhenda H, Linyao Z, et al. Study on scenario generation based on deep clustering and its application in supply-demand imbalance assessment[C]∥ The 8th Asia Conference on Power and Electrical Engineering(ACPEE), Tianjin, China, 2023: 1903-1910. |
| [63] | Duan J, Gao F, He Y. Test scenario generation and optimization technology for intelligent driving systems[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 14(1): 115-127. |
| [64] | Guo P, Gao F. Automated scenario generation and evaluation strategy for automatic driving system[C]∥ The 7th International Conference on Information Science and Control Engineering(ICISCE),2020: 1722-1733. |
| [65] | Tian Y C, Jing D L. Towards an automatic test generation method for systems of systems based on fault injection and model-based systems engineering[J]. Applied Sciences, 2022,12(22): No.11863. |
| [66] | 陈琦. 《智能网联汽车生产企业及产品准入管理指南》为产业变革吹响号角[J]. 汽车与配件, 2021(11):28-29. |
| Chen Qi. The Guidelines for access management of enterprises and products of intelligent connected vehicles: a clarion call for industrial reform[J]. Automobile and Parts, 2021(11): 28-29. | |
| [67] | Gassmann B, Oboril F, Buerkle C, et al. Towards standardization of AV safety: C++ library for responsibility sensitive safety[C]∥IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019:2265-2271. |
| [68] | Hekmatnejad M, Yaghoubi S, Dokhanchi A, et al. Encoding and monitoring responsibility sensitive safety rules for automated vehicles in signal temporal logic[C]∥Proceedings of the 17th ACM-IEEE International Conference on Formal Methods and Models for System Design, 2019: 1-11. |
| [69] | Salay R, Czarnecki K, Elli M S, et al. PURSS: towards perceptual uncertainty aware responsibility sensitive safety with ML[C]∥Workshop on Artificial Intelligence Safety, New York,USA, 2020:91-95. |
| [70] | Chai C, Zeng X, Wu X, et al. Evaluation and optimization of responsibility-sensitive safety models on autonomous car-following maneuvers[J]. Transportation Research Record, 2020, 2674(11): 662-673. |
| [71] | Liu S, Wang X, Hassanin O, et al. Calibration and evaluation of responsibility-sensitive safety (RSS) in automated vehicle performance during cut-in scenarios[J]. Transportation Research Part C: Emerging Technologies, 2021, 125: No.103037. |
| [72] | Tran D Q, Bae S H. Improved responsibility-sensitive safety algorithm through a partially observable Markov decision process framework for automated driving behavior at non-signalized intersection[J]. International Journal of Automotive Technology, 2021, 22(2): 301-314. |
| [73] | 罗嗣卿, 陈慧. 基于生成对抗网络的图像场景转换[J].计算机工程, 2023, 49(4): 217-225. |
| Luo Si-qing, Chen Hui. Image scene transformation based on generative adversarial networks[J]. Computer Engineering, 2023, 49(4): 217-225. | |
| [74] | Junietz P, Bonakdar F, Klamann B, et al. Criticality metric for the safety validation of automated driving using model predictive trajectory optimization[C]∥2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018: 60-65. |
| [75] | Kress-Gazit H, Eder K, Hoffman G, et al. Formalizing and guaranteeing human-robot interaction[J]. Communications of the ACM, 2021, 64(9): 78-84. |
| [76] | 陶飞, 张辰源, 戚庆林, 等. 数字孪生成熟度模型[J]. 计算机集成制造系统, 2022, 28(5): 1267-1281. |
| Tao Fei, Zhang Chen-yuan, Qi Qing-lin, et al. Digital twin maturity model[J].Computer Integrated Manufacturing Systems, 2022, 28(5): 1267-1281. | |
| [77] | 李鑫武, 陈雨轩, 丁华杰, 等. 基于仿真的自动驾驶影子模式数据采集[P]. 中国: CN202211178589.5, 2022-12-2. |
| [78] | Pfeffer R, Leichsenring T. Continuous development of highly automated driving functions with vehicle-in-the-loop using the example of Euro NCAP scenarios[C]∥The 7th Conference on Simulation and Testing for Vehicle Technology, Berlin, Germany, 2016: 33-42. |
| [79] | Tettamanti T, Szalai M, Vass S, et al. Vehicle-in-the-loop test environment for autonomous driving with microscopic traffic simulation[C]∥IEEE International Conference on Vehicular Electronics and Safety (ICVES), Madrid, Spain,2018: 1-6. |
| [80] | Weng B, Capito L, Ozguner U, et al. Towards guaranteed safety assurance of automated driving systems with scenario sampling: an invariant set perspective[J]. IEEE Transactions on Intelligent Vehicles,2021, 7(3): 638-651. |
| [81] | 武小倩, 李国玄, 冷露露. 自动驾驶汽车技术研究[J]. 汽车测试报告, 2023(5): 40-42. |
| Wu Xiao-qian, Li Guo-xuan, Leng Lu-lu. Research on autonomous vehicle technology[J]. Automobile Testing Report, 2023(5): 40-42. | |
| [82] | Koopman P, Wagner M. Challenges in autonomous vehicle testing and validation[J]. SAE International Journal of Transportation Safety, 2016, 4(1): 15-24. |
| [83] | Tumova J, Hall G C, Karaman S, et al. Least-violating control strategy synthesis with safety rules[C]∥Proceedings of The 16th International Conference on Hybrid Systems: Computation and Control, Marrakech, Morocco, 2013: 1-10. |
| [84] | Kress-Gazit H, Fainekos G E, Pappas G J. Temporal-logic-based reactive mission and motion planning[J]. IEEE Transactions on Robotics, 2009, 25(6): 1370-1381. |
| [85] | Fraichard T, Asama H. Inevitable collision states—a step towards safer robots? [J]. Advanced Robotics, 2004, 18(10): 1001-1024. |
| [86] | Chan N, Kuffner J, Zucker M. Improved motion planning speed and safety using regions of inevitable collision[C]∥The 17th CISM-IFToMM Symposium on Robot Design, Dynamics, and Control, Tokyo, Japan, 2008 :103-114. |
| [87] | Dahl J, de Campos G R, Olsson C, et al. Collision avoidance: a literature review on threat-assessment techniques[J]. IEEE Transactions on Intelligent Vehicles, 2018, 4(1): 101-113. |
| [88] | 聂隐愚. 数据驱动的车辆动力学建模与仿真研究[D]. 成都: 西南交通大学牵引动力国家实验室, 2016. |
| Nie Yin-yu. Research on data-driven vehicle dynamics modeling and simulation[D]. Chengdu: State Key Laboratory of Traction Power,Southwest Jiaotong University, 2016. | |
| [89] | 徐学进. 基于驾驶模拟器的车辆动力学建模研究[D].武汉: 武汉理工大学汽车工程学院, 2007. |
| Xu Xue-jin. Research on vehicle dynamics modeling based on driving simulator[D]. Wuhan: School of Automotive Engineering, Wuhan University of Technology, 2007. | |
| [90] | Huang H M, Pavek K, Albus J, et al. Autonomy levels for unmanned systems(ALFUS) framework: an update[J].Unmanned Ground Vehicle Technology VII,2005, 5804: 439-448. |
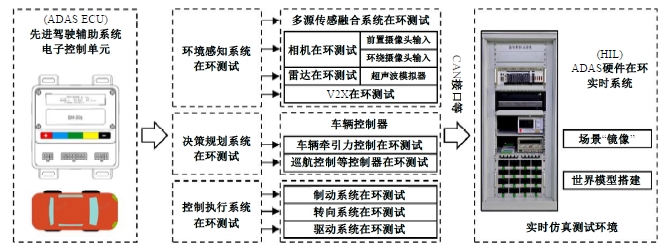
| [91] | 赵文博. 智能汽车行人避撞系统相机在环测试方法研究[D]. 长春: 吉林大学汽车工程学院, 2021. |
| Zhao Wen-bo. Research on camera-in-the-loop test method of pedestrian collision avoidance system for intelligent vehicles[D].Changchun: College of Automotive Engineering, Jilin University, 2021. | |
| [92] | 邢星飞, 翟洪涛, 郑英东, 等. 智能网联汽车毫米波雷达在环测试研究[J]. 汽车电器, 2022(6): 4-7. |
| Xing Xing-fei, Zhai Hong-tao, Zheng Ying-dong, et al. Hardware-in-the-loop testing of millimeter-wave radar for intelligent connected vehicles [J]. Automotive Electronics, 2022(6): 4-7. | |
| [93] | 马谦. 车辆V2X功能硬件在环仿真测试系统研究[J].上海汽车, 2023(4): 27-30. |
| Ma Qian. Hardware-in-the-loop simulation test system for V2X functions of vehicles [J]. Shanghai Automobile, 2023(4): 27-30. | |
| [94] | 夏宋鹏程, 裴凌, 朱一帆, 等. 基于GNSS硬件在环的多源融合定位高逼真仿真方法[J]. 中国惯性技术学报, 2020, 28(2): 8-12. |
| peng-cheng Xia-Song, Pei Ling, Zhu Yi-fan, et al. High-fidelity simulation method for multi-source fusion positioning based on GNSS hardware-in-the-loop [J]. Journal of China Inertial Technology, 2020, 28(2): 8-12. | |
| [95] | 呼啸. 应用ECU在环仿真的EPS系统嵌入式软件测试研究[D]. 长春:吉林大学汽车工程学院, 2012. |
| Hu Xiao. Research on embedded software testing of EPS system using ECU-in-the-loop simulation[D].Changchun: College of Automotive Engineering, Jilin University, 2012. | |
| [96] | Drolia U, Wang Z, Vemuri S, et al. Demo abstract: AutoPlug—an automotive test-bed for ECU testing, validation and verification[C]∥Proceedings of the 10th ACM/IEEE International Conference on Information Processing in Sensor Networks, Chicago, USA, 2011: 131-132. |
| [97] | Zhao T, Yurtsever E, Paulson J A, et al. Formal certification methods for automated vehicle safety assessment[J]. IEEE Transactions on Intelligent Vehicles, 2022,8(1): 232-249. |
| [98] | 卜磊, 解定宝. 混成系统形式化验证[J]. 软件学报, 2014, 25(2): 15-25. |
| Bu Lei, Xie Ding-bao. Formal verification of hybrid systems[J]. Journal of Software, 2014, 25(2): 15-25. | |
| [99] | Domenici A, Fagiolini A, Palmieri M. Integrated simulation and formal verification of a simple autonomous vehicle[C]∥Software Engineering and Formal Methods: SEFM 2017 Collocated Workshops: DataMod, FAACS, MSE, CoSim-CPS, and FOCLASA, Trento, Italy, 2017: 300-314. |
| [100] | 刘秉政, 曹凯, 马建军. 自主车辆行为决策的安全验证方法[J]. 山东理工大学学报: 自然科学版, 2011, 25(6): 7-10. |
| Liu Bing-zheng, Cao Kai, Ma Jian-jun. Safety verification method for behavior decision-making of autonomous vehicles [J]. Journal of Shandong University of Technology(Natural Science Edition), 2011, 25(6): 7-10. | |
| [101] | 张雅顺. 混合系统的形式验证方法及其应用[D].合肥:合肥工业大学电气与自动化工程学院, 2006. |
| Zhang Ya-shun. Formal verification method of hybrid system and its application[D].Hefei: School of Electrical Engineering and Automation, Hefei University of Technology, 2006. | |
| [102] | Mitchell I M. A toolbox of level set methods version 1.0[J]. Journal of Molecular Graphics & Modelling, 2004, 25(4): 442-454. |
| [103] | Kiran B R, Sobh I, Talpaert V, et al. Deep reinforcement learning for autonomous driving: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(6): 4909-4926. |
| [104] | Li L, Lin Y L, Cao D P, et al. Parallel learning-a new framework for machine learning[J]. Acta Automatica Sinica, 2017, 43(1): 1-8. |
| [105] | Ly A O, Akhloufi M. Learning to drive by imitation: an overview of deep behavior cloning methods[J]. IEEE Transactions on Intelligent Vehicles, 2020, 6(2): 195-209. |
| [106] | Ma Y, Wang Z, Yang H, et al. Artificial intelligence applications in the development of autonomous vehicles: a survey[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 315-329. |
| [107] | Chauhan N K, Singh K. A review on conventional machine learning vs deep learning[C]∥International Conference on Computing, Power and Communication Technologies(GUCON), Beijing, China, 2018: 347-352. |
| [108] | Sun C, Su L, Gu S, et al. Cross validation for CNN based affordance learning and control for autonomous driving[C]∥IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 2019: 1519-1524. |
| [109] | Al-Sharman M, Murdoch D, Cao D, et al. A sensorless state estimation for a safety-oriented cyber-physical system in urban driving: deep learning approach[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 8(1): 169-178. |
| [110] | Ding W, Wang W, Zhao D. A multi-vehicle trajectories generator to simulate vehicle-to-vehicle encountering scenarios[C]∥International Conference on Robotics and Automation (ICRA), Montreal,Canada, 2019: 4255-4261. |
| [111] | Wang W, Ramesh A, Zhu J, et al. Clustering of driving encounter scenarios using connected vehicle trajectories[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5(3): 485-496. |
| [112] | Krajewski R, Moers T, Nerger D, et al. Data-driven maneuver modeling using generative adversarial networks and variational autoencoders for safety validation of highly automated vehicles[C]∥The 21st International Conference on Intelligent Transportation Systems(ITSC), Maui, USA, 2018: 2383-2390. |
| [113] | Rowe J, Smith A, Pokorny B, et al. Toward automated scenario generation with deep reinforcement learning in GIFT[C]∥Proceedings of the Sixth Annual GIFT User Symposium,Orlando,USA, 2018: 65-74. |
| [114] | Littman M L. Reinforcement learning improves behaviour from evaluative feedback[J]. Nature, 2015, 521(7553): 445-451. |
| [115] | Li N, Oyler D W, Zhang M, et al. Game theoretic modeling of driver and vehicle interactions for verification and validation of autonomous vehicle control systems[J]. IEEE Transactions on Control Systems Technology, 2017, 26(5): 1782-1797. |
| [116] | Oyler D W, Yildiz Y, Girard A R, et al. A game theoretical model of traffic with multiple interacting drivers for use in autonomous vehicle development[C]∥American Control Conference (ACC), Boston, USA, 2016: 1705-1710. |
| [117] | Albaba B M, Yildiz Y. Driver modeling through deep reinforcement learning and behavioral game theory[J]. IEEE Transactions on Control Systems Technology, 2021, 30(2): 885-892. |
| [118] | Feng S, Feng Y, Sun H, et al. Testing scenario library generation for connected and automated vehicles, part Ⅱ: case studies[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(9):5635-5647. |
| [119] | Kang S, Guo H, Su P, et al. Ecsas: exploring critical scenarios from action sequence in autonomous driving[C]∥2023 IEEE 32nd Asian Test Symposium (ATS), Beijing, China, 2023: 1-6. |
| [120] | Humeniuk D, Khomh F, Antoniol G. Reinforcement learning informed evolutionary search for autonomous systems testing[J]. ACM Transactions on Software Engineering and Methodology, 2024, 33(8): 1-45. |
| [121] | Wang X, Zhang S, Peng H. Comprehensive safety evaluation of highly automated vehicles at the roundabout scenario[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 20873-20888. |
| [122] | Lu C. Test scenario generation for autonomous driving systems with reinforcement learning[C]∥IEEE/ACM 45th International Conference on Software Engineering: Companion Proceedings(ICSE-Companion), Melbourne,Australia, 2023: 317-319. |
| [123] | Gao J, Li S, Tao C, et al. An approach to GUI test scenario generation using machine learning[C]∥ IEEE International Conference on Artificial Intelligence Testing(AITest), Newark, USA, 2022: 79-86. |
| [124] | Wachi A. Failure-scenario maker for rule-based agent using multi-agent adversarial reinforcement learning and its application to autonomous driving[J/OL].[2023-08-22]. |
| [125] | Ma Y, Sun C, Chen J, et al. Verification and validation methods for decision-making and planning of automated vehicles: a review[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 480-498. |
| [126] | Niu H, Ren K, Xu Y, et al. (Re) 2H2O: Autonomous driving scenario generation via reversely regularized hybrid offline-and-online reinforcement learning[C]∥IEEE Intelligent Vehicles Symposium(IV), Anchorage, Alaska, USA, 2023 :1-8. |
| [127] | Behzadan V, Munir A. Adversarial reinforcement learning framework for benchmarking collision avoidance mechanisms in autonomous vehicles[J]. IEEE Intelligent Transportation Systems Magazine, 2019,13(2): 236-241. |
| [128] | Chen B, Chen X, Wu Q, et al. Adversarial evaluation of autonomous vehicles in lane-change scenarios[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(8): 10333-10342. |
| [129] | Erdogan A, Kaplan E, Leitner A, et al. Parametrized end-to-end scenario generation architecture for autonomous vehicles[C]∥The 6th International Conference on Control Engineering & Information Technology(CEIT),Hong Kong, China, 2018:1-6. |
| [130] | Pütz A, Zlocki A, Küfen J, et al. Database approach for the sign-off process of highly automated vehicles[C]∥25th International Technical Conference on the Enhanced Safety of Vehicles (ESV) National Highway Traffic Safety Administration, Detroit, Michigan, USA, 2017: 1-8. |
| [131] | Hsueh M C, Tsai T K, Iyer R K. Fault injection techniques and tools[J]. Computer, 1997,30(4): 75-82. |
| [132] | Juez G, Amparan E, Lattarulo R, et al. Early safety assessment of automotive systems using sabotage simulation-based fault injection framework[C]∥International Conference on Computer Safety, Reliability, and Security,Vienna, Austria, 2017: 255-269. |
| [133] | Fu Y, Terechko A, Bijlsma T, et al. A Retargetable Fault Injection Framework for Safety Validation of Autonomous Vehicles[M]. Hamburg:ICSA-C,2019:69-76. |
| [134] | Juez G, Amparan E, Lattarulo R, et al. Early safety assessment of automotive systems using sabotage simulation-based fault injection framework[C]∥International Conference on Computer Safety, Reliability, and Security, Vienna, Austria, 2017: 255-269 |
| [135] | Karunakaran D, Berrio JS, Worrall S, et al. Critical concrete scenario generation using scenario-based falsification[C]∥IEEE International Conference on Recent Advances in Systems Science and Engineering (RASSE), Tainan, China, 2022: 1-8. |
| [136] | Leung K, Schmerling E, Zhang M, et al. On infusing reachability-based safety assurance within planning frameworks for human-robot vehicle interactions[J]. The International Journal of Robotics Research, 2020, 39(10-11): 1326-1345. |
| [137] | Chen M, Tam Q, Livingston S C, et al. Signal temporal logic meets reachability: connections and applications[C]∥International Workshop on the Algorithmic Foundations of Robotics, Shenzhen, China, 2018:581-601. |
| [1] | 卢荡,索艳茹,孙宇航,吴海东. 基于无量纲格式的轮胎侧倾侧偏力学特性预测[J]. 吉林大学学报(工学版), 2025, 55(5): 1516-1524. |
| [2] | 李伟东,马草原,史浩,曹衡. 基于分层强化学习的自动驾驶决策控制算法[J]. 吉林大学学报(工学版), 2025, 55(5): 1798-1805. |
| [3] | 张涛,林黄达,余中军. 混合动力车辆换挡的实时滚动优化控制方法[J]. 吉林大学学报(工学版), 2025, 55(4): 1215-1224. |
| [4] | 卢荡,王晓凡,吴海东. TWEEL轮胎接地压力均布特性分析[J]. 吉林大学学报(工学版), 2025, 55(3): 811-819. |
| [5] | 曲俊龙,史文库,玄圣夷,陈志勇. 面向汽车传动系统多挡共振的多级吸振器参数设计方法[J]. 吉林大学学报(工学版), 2025, 55(2): 444-455. |
| [6] | 朱冰,范天昕,赵文博,李伟男,张培兴. 自动驾驶汽车连续测试场景复杂度评估方法[J]. 吉林大学学报(工学版), 2025, 55(2): 456-467. |
| [7] | 陈鑫,张祥源,武子涛,于贵申,杨立飞. 工艺顺序对车用铝薄板胶-PFSSW接头拉剪性能的影响[J]. 吉林大学学报(工学版), 2025, 55(2): 468-475. |
| [8] | 刘展鹏,马振超. 考虑隐私信息安全性的极少样本条件指纹图像细节加密算法[J]. 吉林大学学报(工学版), 2025, 55(2): 687-692. |
| [9] | 王军年,曹宇靖,罗智仁,李凯旋,赵文伯,孟盈邑. 基于双目视觉的道路水深在线检测算法[J]. 吉林大学学报(工学版), 2025, 55(1): 175-184. |
| [10] | 谭草,任浩鑫,葛文庆,宋亚东,陆佳瑜. 直驱阀控液压振动平台改进自抗扰控制[J]. 吉林大学学报(工学版), 2025, 55(1): 84-92. |
| [11] | 胡宏宇,张争光,曲优,蔡沐雨,高菲,高镇海. 基于双分支和可变形卷积网络的驾驶员行为识别方法[J]. 吉林大学学报(工学版), 2025, 55(1): 93-104. |
| [12] | 李寿涛,杨路,屈如意,孙鹏鹏,于丁力. 基于模型预测控制的滑移率控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2687-2696. |
| [13] | 吴量,顾义凡,邢彪,马芳武,倪利伟,贾微微. 基于线性二次型调节器的四轮转向与分布式集成控制方法[J]. 吉林大学学报(工学版), 2024, 54(9): 2414-2422. |
| [14] | 王玉海,李晓之,李兴坤. 面向高速工况的混合动力卡车预见性节能算法[J]. 吉林大学学报(工学版), 2024, 54(8): 2121-2129. |
| [15] | 常胜,刘宏飞,邹乃威. 汽车变曲率路径循迹H∞回路成形鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(8): 2141-2148. |
|