吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (9): 2414-2422.doi: 10.13229/j.cnki.jdxbgxb.20221440
• 车辆工程·机械工程 • 上一篇
基于线性二次型调节器的四轮转向与分布式集成控制方法
吴量1( ),顾义凡1,邢彪1,马芳武1,倪利伟1,2,贾微微3()
),顾义凡1,邢彪1,马芳武1,倪利伟1,2,贾微微3()
- 1.吉林大学 汽车底盘集成与仿生全国重点实验室,长春 130022
2.河南工程学院 机械工程学院,郑州 451191
3.吉林财经大学 管理科学与信息工程学院,长春 130117
Steering four-wheel distributed integrated control method based on LQR
Liang WU1(),Yi-fan GU1,Biao XING1,Fang-wu MA1,Li-wei NI1,2,Wei-wei JIA3()
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.School of Mechanical Engineering,Henan Institute of Engineering,Zhengzhou 451191,China
3.School of Management Science and Information Engineering,Jilin University of Finance and Economics,Changchun 130117,China
摘要:
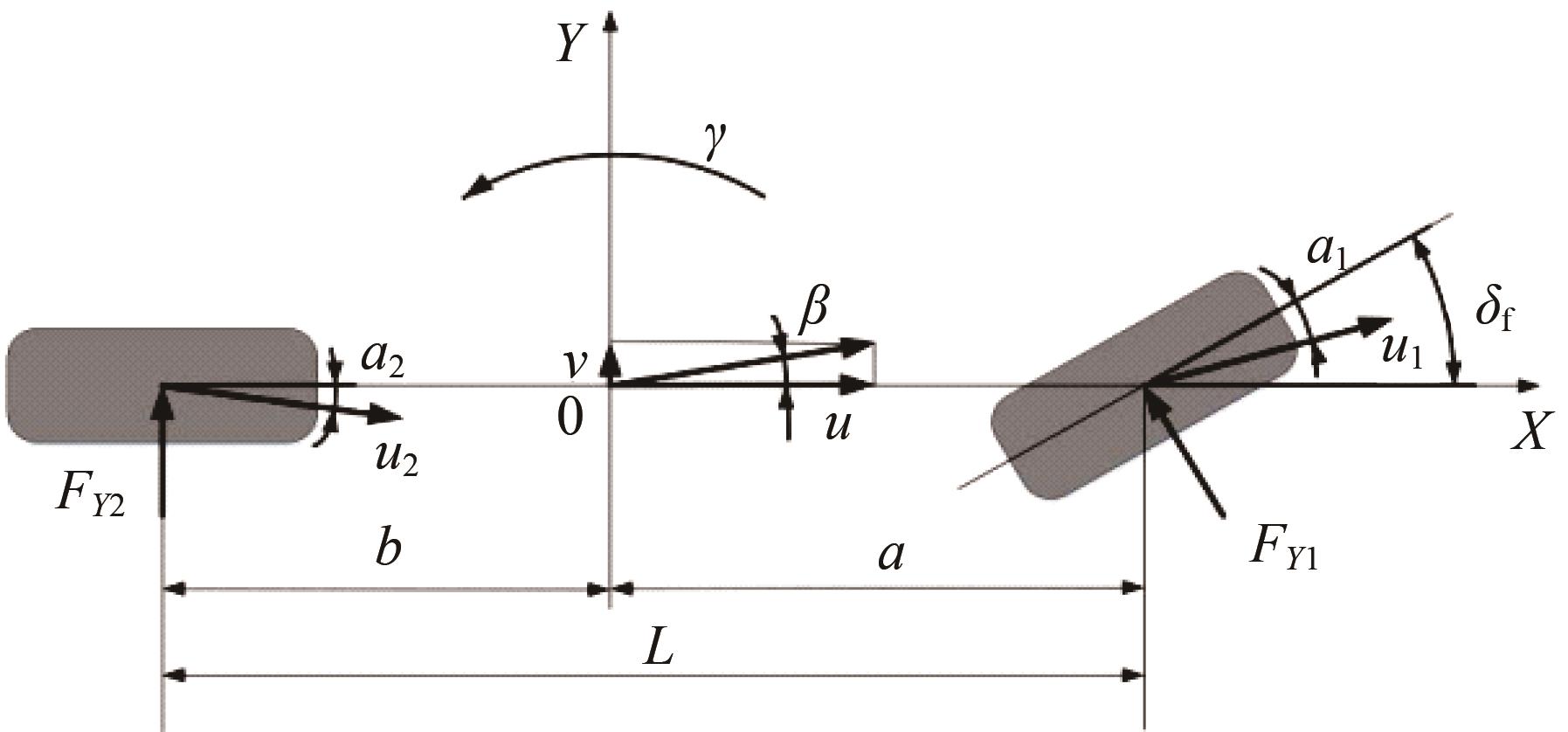
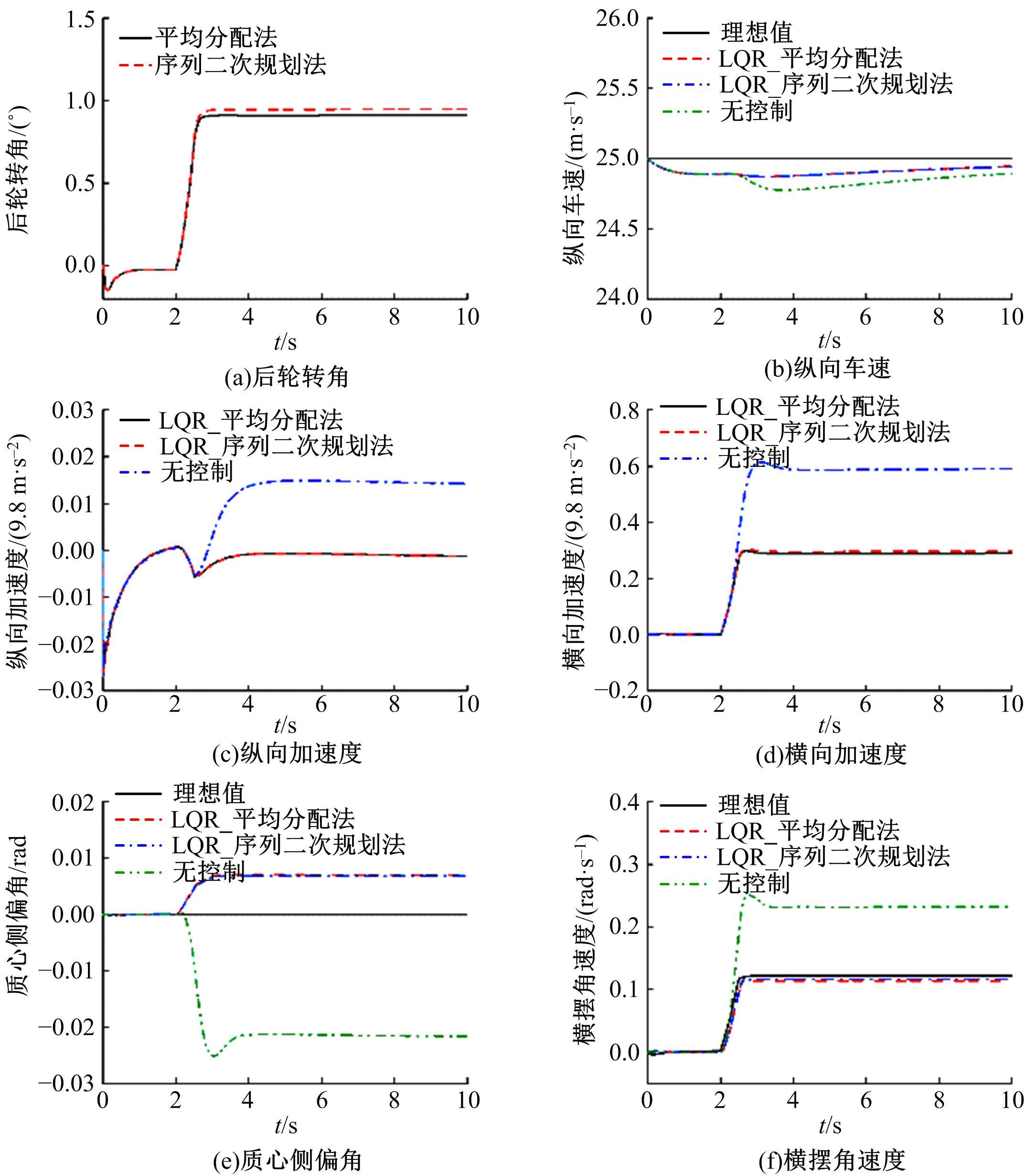
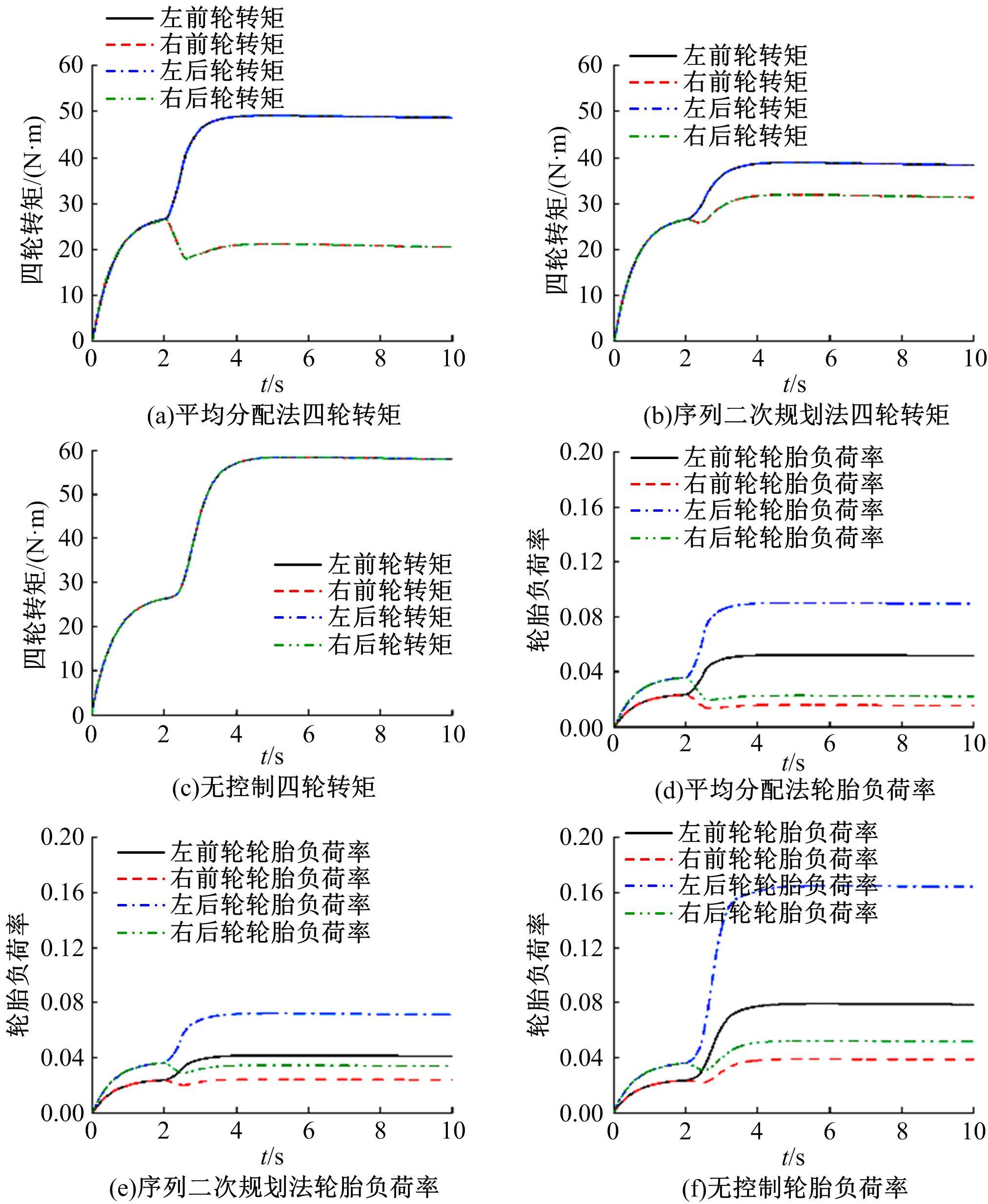
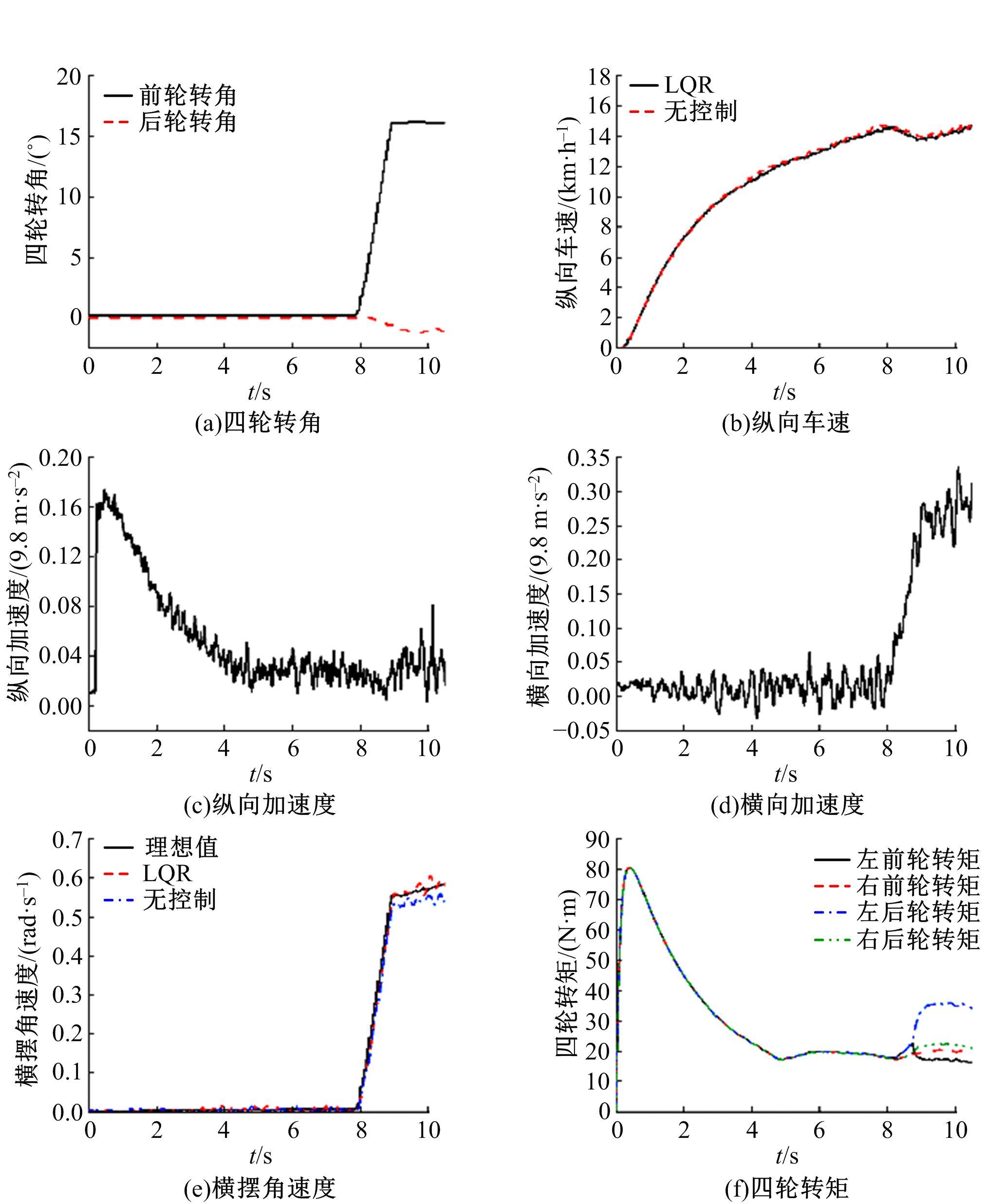
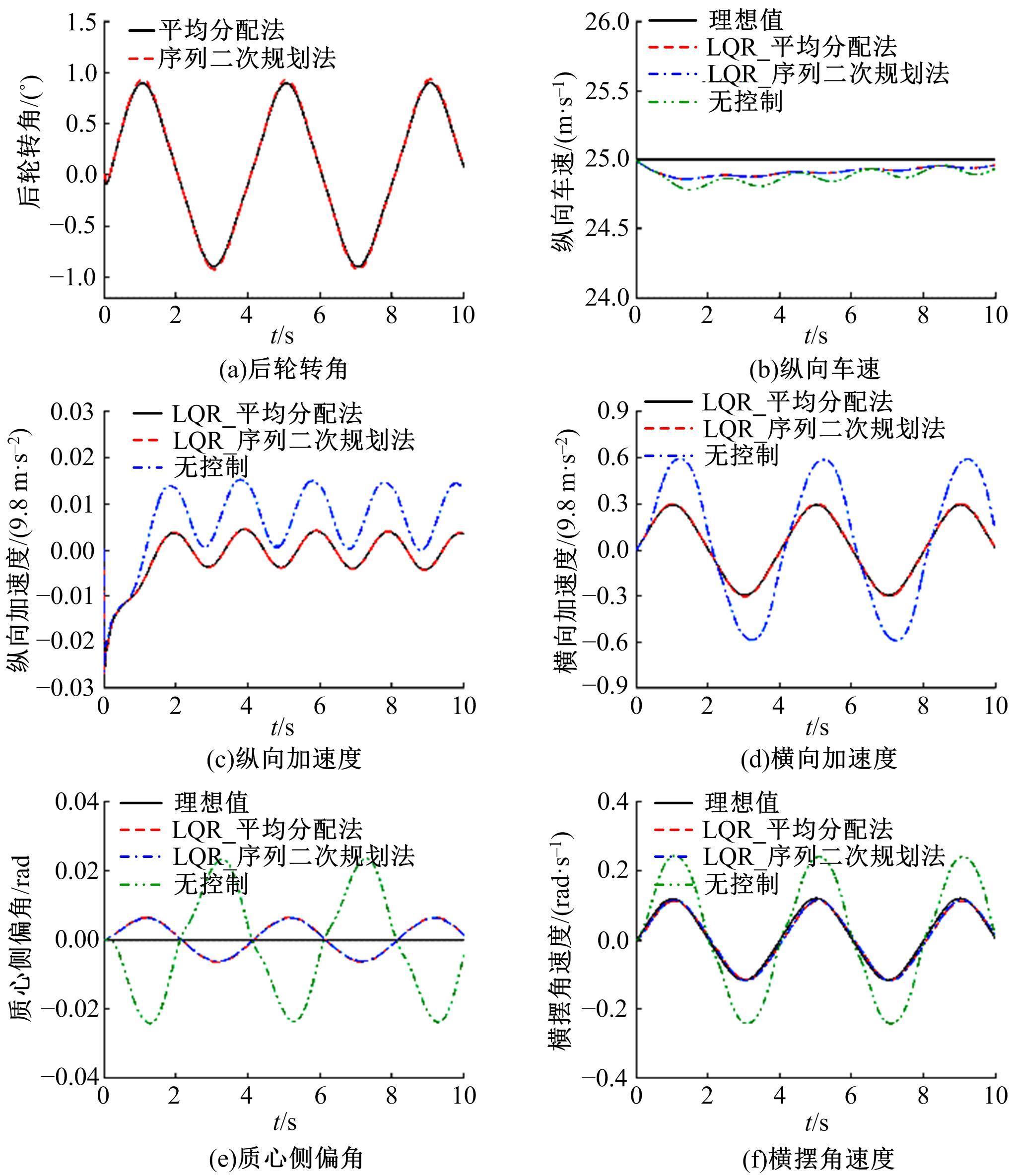
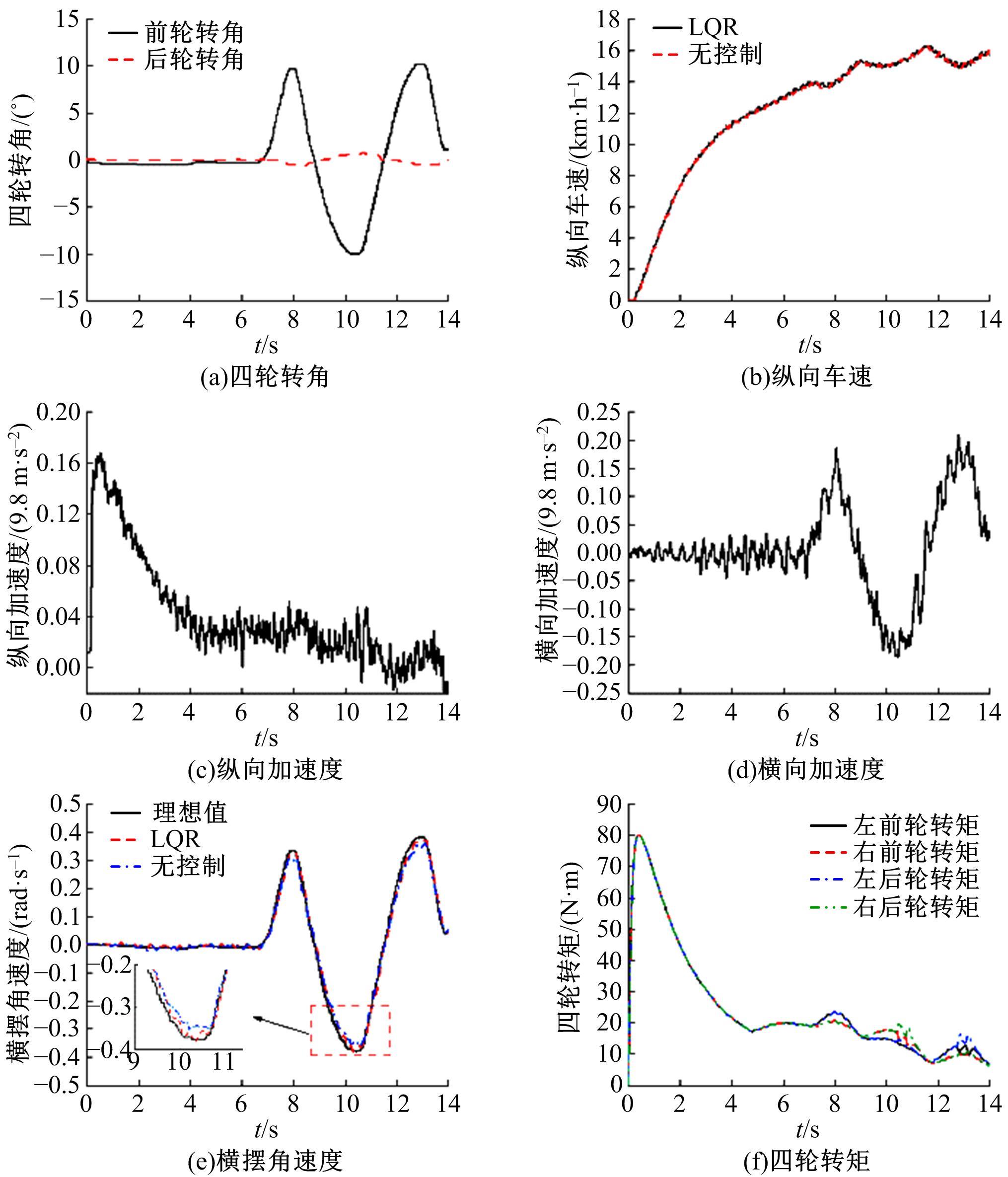
本文基于线性二次型调节器,集成四轮转向和直接横摆力矩控制设计了一种车辆稳定控制器,实现协同控制策略的创新。该控制系统采用分层结构,上层为基于线性二次型调节器的横摆力矩决策层,下层为驱动力分配层。上层控制器采用迭代法实时求解黎卡提方程得到后轮转角与附加横摆力矩,以完成对质心侧偏角、横摆角速度的优化;下层控制器采用平均分配与序列二次规划两种分配方法,对求得的纵向力与附加横摆力矩进行四轮转矩分配。为了验证控制器的有效性,采用前轮转角阶跃、正弦两种工况对其进行仿真及实车试验。结果表明:该控制器能够使车辆质心侧偏角、横摆角速度较好地追踪理想值,车辆稳定性得到了提高;同时,序列二次规划法更好地降低了轮胎负荷率并延长了电机控制器的使用寿命。
中图分类号:
- U461.6












| 1 | 罗剑. 分布式电驱动车辆制/驱动力协调及主动容错控制[D]. 北京: 清华大学机械工程学院, 2014. |
| Luo Jian. Distributed electric vehicle system/driving force coordination and active fault tolerant control[D]. Beijing:School of Mechanical Engineering, Tsinghua University,2014. | |
| 2 | Wang Z, Zhu J, Zhang L, et al. Automotive ABS/DYC coordinated control under complex driving conditions[J]. IEEE Access, 2018, 6: 32769-32779. |
| 3 | 刘颖. 电动汽车DYC系统与主动悬架系统联合控制研究[D]. 武汉:武汉科技大学汽车与交通工程学院, 2018. |
| Liu Ying. Research on joint control of electric vehicle DYC system and active suspension system[D]. Wuhan:School of Automobile and Traffic Engineering, Wuhan University of Science and Technology, 2018. | |
| 4 | 田燃. 四轮转向与直接横摆力矩控制[D]. 合肥: 合肥工业大学电气与自动化工程学院, 2018. |
| Tian Ran. Four wheel steering and direct yaw moment control[D]. Hefei:School of Electrical Engineering and Automation, Hefei University of Technology,2018. | |
| 5 | Masao N, Sachiko Y, Yutaka H. Integrated control of active rear wheel steering and yaw moment control using braking forces[J]. JSME International Journal Series C-Mechanical Systems Machine Elements and Manufacturing, 1999, 42(2): 301-308. |
| 6 | 彭文正, 敖银辉, 邹晨祺, 等. 主动后轮转向及分布式驱动车辆协同控制研究[J]. 机械科学与技术, 2020(2): 207-213. |
| Peng Wen-zheng, Ao Yin-hui, Zou Chen-qi, et al. Research on cooperative control of active rear-wheel steering and distributed drive vehicle[J].Mechanical Science and Technology,2020(2):207-213. | |
| 7 | Zhou L, Ou L L, Wang C. A simulation of the four-wheel steering vehicle stability based on dyc control[C]∥2009 International Conference on Measuring Technology and Mechatronics Automation,Zhangjiajie, China, 2009: 189-193. |
| 8 | Hang P, Chen X B, Fang S D, et al. Robust control for four-wheel-independent-steering electric vehicle with steer-by-wire system[J]. International Journal of Automotive Technology, 2017, 18(5): 785-797. |
| 9 | Hu J, Hu Z, Fu C, et al. Integrated control of AFS and DYC for in-wheel-motor electric vehicles based on operation region division[J]. International Journal of Vehicle Design, 2019,79: 221-247. |
| 10 | Kanchwala H, Trigell A S. Vehicle handling control of an electric vehicle using active torque distribution and rear wheel steering[J]. International Journal of Vehicle Design,2017, 74(4): 319-345. |
| 11 | 杜峰. 基于线控技术的四轮主动转向汽车控制策略仿真研究[D]. 西安: 长安大学汽车学院, 2009. |
| Du Feng. Simulation research on control strategy of four-wheel active steering vehicle based on wire control technology[D]. Xi'an: School of Automobile,Chang'an University, 2009. | |
| 12 | 郭烈, 葛平淑, 许林娜,等. 转向工况下的分布式电动汽车稳定性控制[J]. 华南理工大学学报: 自然科学版, 2020, 48(3): 100-107. |
| Guo Lie, Ge Ping-shu, Xu Lin-na, et al. Distributed electric vehicle stability control under steering conditions[J]. Journal of South China University of Technology (Natural Science Edition), 2020,48(3): 100-107. | |
| 13 | 聂家弘. 无人驾驶智能平台四轮转向轨迹跟踪控制研究[D]. 长春: 吉林大学车辆工程学院, 2020. |
| Nie Jia-hong. Research on four-wheel steering trajectory tracking control of unmanned intelligent platform[D]. Changchun: College of Automotive Engineering,Jilin University, 2020. |
| [1] | 王玉海,李晓之,李兴坤. 面向高速工况的混合动力卡车预见性节能算法[J]. 吉林大学学报(工学版), 2024, 54(8): 2121-2129. |
| [2] | 常胜,刘宏飞,邹乃威. 汽车变曲率路径循迹H∞回路成形鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(8): 2141-2148. |
| [3] | 刘建泽,柳江,李敏,章新杰. 基于最小二乘的车速解耦路面辨识方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1821-1830. |
| [4] | 鲜斌,王印鑫,王岭. 无人机集群分布式跟踪抗扰控制设计与实验验证[J]. 吉林大学学报(工学版), 2024, 54(7): 2093-2103. |
| [5] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [6] | 刘从臻,陈高,刘洪柱,马强,徐成伟,孟辉,王国林. 湿滑路面轮胎接地力学特性模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1501-1511. |
| [7] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
| [8] | 郭洪艳,王连冰,赵旭,戴启坤. 考虑侧向运动的整车质量与道路坡度估计[J]. 吉林大学学报(工学版), 2024, 54(5): 1175-1187. |
| [9] | 陆玉凯,袁帅科,熊树生,朱绍鹏,张宁. 汽车漆面缺陷高精度检测系统[J]. 吉林大学学报(工学版), 2024, 54(5): 1205-1213. |
| [10] | 汪少华,张启睿,施德华,殷春芳,李春. 双行星排式混合动力传动系统非线性振动响应特性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 890-901. |
| [11] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [12] | 谢宪毅,王禹涵,金立生,赵鑫,郭柏苍,廖亚萍,周彬,李克强. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3): 620-630. |
| [13] | 邓小林,杨馥模,覃善甘. 新型仿竹六边形梯度层级多胞管耐撞性对比分析[J]. 吉林大学学报(工学版), 2024, 54(2): 333-345. |
| [14] | 王毅刚,王玉鹏,张昊,赵思安. 高速列车转向架区域气动噪声源识别与分析[J]. 吉林大学学报(工学版), 2024, 54(2): 346-355. |
| [15] | 聂建军,侯军凯,解晓琳,鄢鸿桢. 新型巡检机器人移动底盘设计及越障性能分析[J]. 吉林大学学报(工学版), 2024, 54(2): 356-364. |
|
||