吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (8): 2121-2129.doi: 10.13229/j.cnki.jdxbgxb.20221388
• 车辆工程·机械工程 • 下一篇
面向高速工况的混合动力卡车预见性节能算法
王玉海1( ),李晓之1,李兴坤2
),李晓之1,李兴坤2
- 1.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
2.清华大学 汽车安全与节能国家重点实验室,北京 100084
Predictive energy saving algorithm for hybrid electric truck under high-speed condition
Yu-hai WANG1(),Xiao-zhi LI1,Xing-kun LI2
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.State Key Laboratory of Automotive Safety and Energy,Tsinghua University,Beijing 100084,China
摘要:
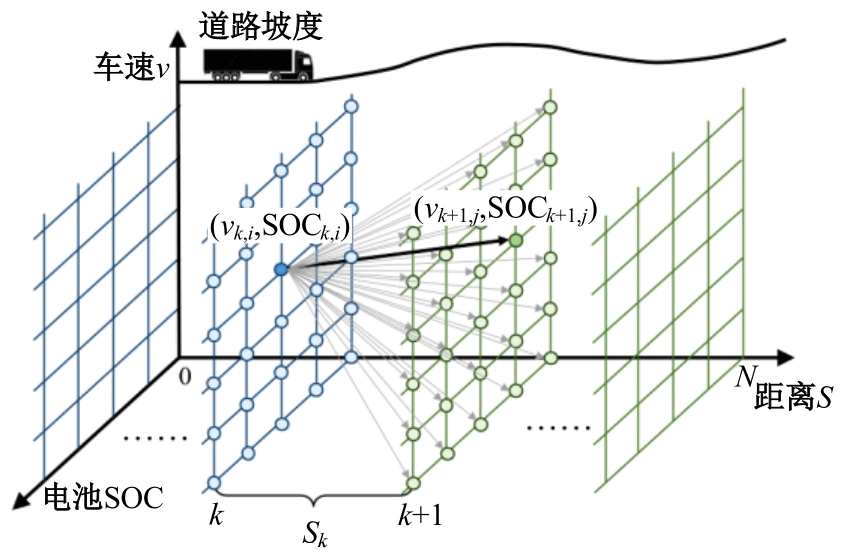
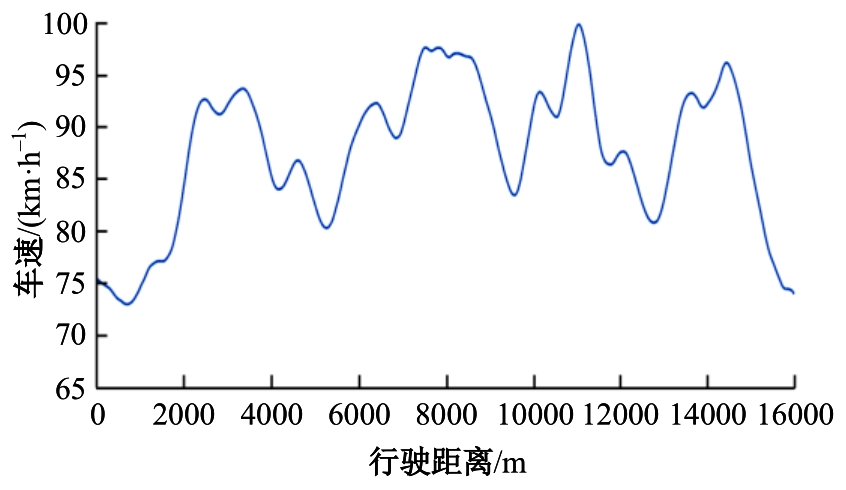
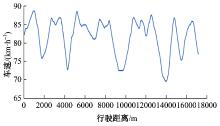
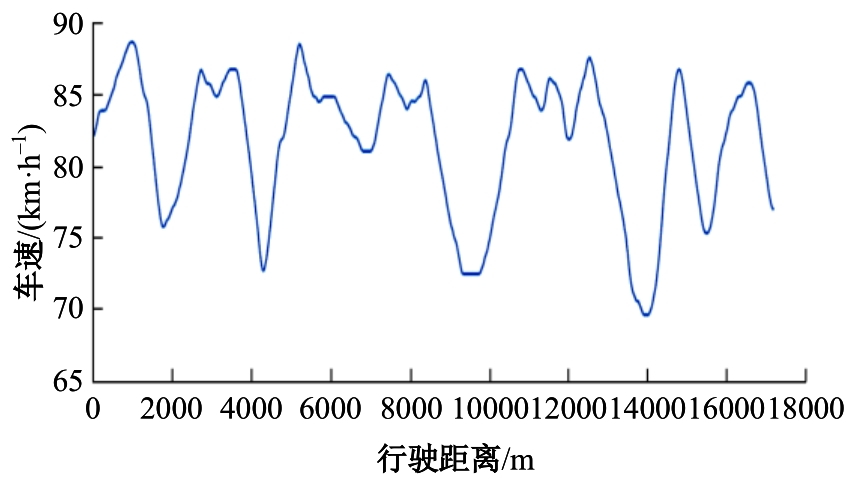
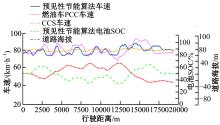
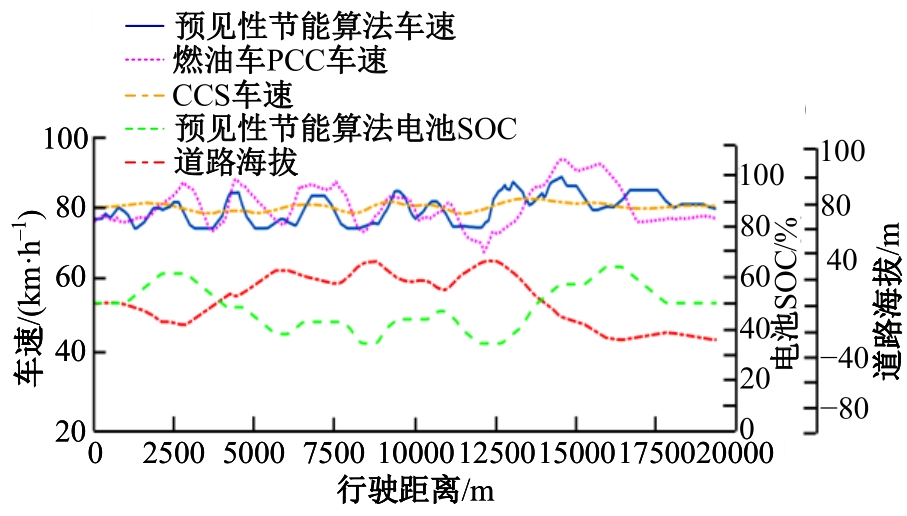
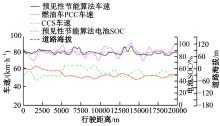
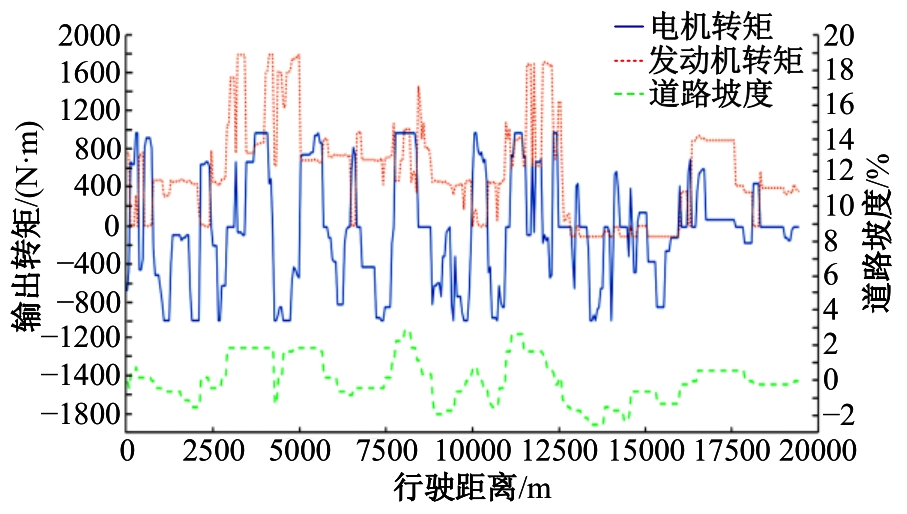
重型卡车长途货物运输过程中,车辆主要行驶工况为车速小范围波动的高速巡航工况。为进一步提升车辆在该工况下的节油率,以P2构型单轴并联式混合动力卡车为研究对象,提出了以发动机燃油消耗量最小为目标的预见性节能算法。基于车辆前方道路坡度变化,考虑车速变化与动力部件能量分配对车辆油耗的影响,将车速与电池SOC作为系统状态变量,用动态规划算法确定针对当前行驶道路的全局最优未来车速轨迹及能量分配规则。经对比验证,本文算法得出的车速规划及能量分配结果合理,且采用预见性节能算法的混动卡车相较定速巡航(CCS)下采用动态规划算法的混动卡车及预见性巡航控制(PCC)下的纯燃油卡车节油率分别为3.19%和6.26%。
中图分类号:
- U461.8






| 1 | 洪金龙, 高炳钊, 董世营, 等. 智能网联汽车节能优化关键问题与研究进展[J]. 中国公路学报, 2021, 34(11): 306-334. |
| Hong Jin-long, Gao Bing-zhao, Dong Shi-ying, et al. Key problems and research progress of energy saving optimization for intelligent connected vehicles[J]. China Journal of Highway and Transport, 2021, 34(11): 306-334. | |
| 2 | 景远, 焦晓红. 基于交通信息和模型预测控制的混合动力汽车能量管理策略综述[J]. 燕山大学学报, 2019, 43(4): 319-330. |
| Jing Yuan, Jiao Xiao-hong. A review of energy management strategies for hybrid electric vehicles based on traffic information and model predictive control[J]. Journal of Yanshan University, 2019, 43(4): 319-330. | |
| 3 | 武小花, 余忠伟, 朱张玲, 等. 燃料电池公交车模糊能量管理策略[J].吉林大学学报: 工学版, 2022, 52(9): 2077-2084. |
| Wu Xiao-hua, Yu Zhong-wei, Zhu Zhang-ling, et al. Fuzzy energy management strategy of fuel cell buses[J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2077-2084. | |
| 4 | 王哲, 谢怡, 臧鹏飞, 等. 基于极小值原理的燃料电池客车能量管理策略[J]. 吉林大学学报: 工学版, 2020, 50(1): 36-43. |
| Wang Zhe, Xie Yi, Zang Peng-fei, et al. Energy management strategy of fuel cell bus based on pontryagin's minimum principle[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 36-43. | |
| 5 | 巴特, 高印寒, 王庆年, 等. 基于动态规划算法的并联混合动力客车控制策略优化[J]. 汽车工程, 2015, 37(12): 1359-1365. |
| Ba Te, Gao Yin-han, Wang Qing-nian, et al. Control strategy optimization for a parallel hybrid electric bus based on dynamic programming algorithm[J]. Automotive Engineering, 2015, 37(12): 1359-1365. | |
| 6 | Yang Y L, Pei H X, Hu X S, et al. Fuel economy optimization of power split hybrid vehicles: a rapid dynamic programming approach[J]. Energy, 2019, 166: 929-938. |
| 7 | 江冬冬, 李道飞, 俞小莉. 基于混杂模型预测控制的混合动力车辆能量管理[J]. 吉林大学学报: 工学版, 2020, 50(4): 1217-1226. |
| Jiang Dong-dong, Li Dao-fei, Yu Xiao-li. Energy management of HEV based on hybrid model predictive control[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(4): 1217-1226. | |
| 8 | 宋大凤, 云千芮, 杨南南, 等. 行星式混合动力客车的模型预测动态协调控制[J]. 哈尔滨工业大学学报, 2019, 51(1): 150-156. |
| Song Da-feng, Yun Qian-rui, Yang Nan-nan, et al. Model predictive dynamic coordinated control of planetary hybrid electric bus[J]. Journal of Harbin Institute of Technology, 2019, 51(1): 150-156. | |
| 9 | Sciarretta A, Giovanni D, Ojeda L. Optimal ecodriving control: energy-efficient driving of road vehicles as an optimal control problem[J]. IEEE Control Systems, 2015, 35(5): 71-90. |
| 10 | 王建强, 俞倩雯, 李升波, 等. 基于道路坡度实时信息的经济车速优化方法[J]. 汽车安全与节能学报, 2014, 5(3): 257-262. |
| Wang Jian-qiang, Yu Qian-wen, Li Sheng-bo, et al. Eco speed optimization based on real-time information of road gradient[J]. Journal of Automotive Safety and Energy, 2014, 5(3): 257-262. | |
| 11 | 王玉海, 李兴坤, 张鹏雷, 等. 基于ADAS地图的载货车预见巡航实时优化算法[J]. 汽车工程, 2020, 42(10): 1335-1339. |
| Wang Yu-hai, Li Xing-kun, Zhang Peng-lei, et al. Real-time optimization algorithm for truck predictive cruise based on ADAS map[J]. Automotive Engineering, 2020, 42(10):1335-1339. | |
| 12 | Chu H Q, Guo L L, Gao B Z, et al. Predictive cruise control using high-definition map and real vehicle implementation[J]. IEEE Transactions on Vehicular Technology, 2018, 67(12):11377-11389. |
| 13 | 鞠飞, 庄伟超, 王良模, 等. 混合动力汽车经济型巡航的车速规划策略[J]. 浙江大学学报: 工学版, 2021, 55(8): 1538-1547. |
| Ju Fei, Zhuang Wei-chao, Wang Liang-mo, et al. Velocity planning strategy for economic cruise of hybrid electric vehicles[J]. Journal of Zhejiang University (Engineering Science), 2021, 55(8): 1538-1547. | |
| 14 | Zeng X R, Wang J M. A parallel hybrid electric vehicle energy management strategy using stochastic model predictive control with road grade preview[J]. IEEE Transactions on Control Systems Technology, 2015, 23(6): 2416-2423. |
| 15 | Deng J P, Re L G, Joes S. Predictive hybrid powertrain energy management with asynchronous cloud update[J]. IFAC-PapersOnLine, 2020, 53(2):14123 -14128. |
| 16 | 付雪青, 王宝森, 杨建军, 等. 基于双状态动态规划混动汽车坡道生态驾驶策略[J]. 汽车安全与节能学报, 2021, 12(3): 373-379. |
| Fu Xue-qing, Wang Bao-sen, Yang Jian-jun, et al. Eco-driving strategy at ramp road for hybrid electric vehicles based on two-state dynamic programming[J]. Journal of Automotive Safety and Energy, 2021, 12(3): 373-379. |
| [1] | 常胜,刘宏飞,邹乃威. 汽车变曲率路径循迹H∞回路成形鲁棒控制[J]. 吉林大学学报(工学版), 2024, 54(8): 2141-2148. |
| [2] | 刘建泽,柳江,李敏,章新杰. 基于最小二乘的车速解耦路面辨识方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1821-1830. |
| [3] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [4] | 刘从臻,陈高,刘洪柱,马强,徐成伟,孟辉,王国林. 湿滑路面轮胎接地力学特性模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1501-1511. |
| [5] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
| [6] | 郭洪艳,王连冰,赵旭,戴启坤. 考虑侧向运动的整车质量与道路坡度估计[J]. 吉林大学学报(工学版), 2024, 54(5): 1175-1187. |
| [7] | 陆玉凯,袁帅科,熊树生,朱绍鹏,张宁. 汽车漆面缺陷高精度检测系统[J]. 吉林大学学报(工学版), 2024, 54(5): 1205-1213. |
| [8] | 汪少华,张启睿,施德华,殷春芳,李春. 双行星排式混合动力传动系统非线性振动响应特性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 890-901. |
| [9] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [10] | 谢宪毅,王禹涵,金立生,赵鑫,郭柏苍,廖亚萍,周彬,李克强. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3): 620-630. |
| [11] | 邓小林,杨馥模,覃善甘. 新型仿竹六边形梯度层级多胞管耐撞性对比分析[J]. 吉林大学学报(工学版), 2024, 54(2): 333-345. |
| [12] | 王毅刚,王玉鹏,张昊,赵思安. 高速列车转向架区域气动噪声源识别与分析[J]. 吉林大学学报(工学版), 2024, 54(2): 346-355. |
| [13] | 聂建军,侯军凯,解晓琳,鄢鸿桢. 新型巡检机器人移动底盘设计及越障性能分析[J]. 吉林大学学报(工学版), 2024, 54(2): 356-364. |
| [14] | 胡宏宇,张慧珺,姚荣涵,陈国迎,高菲. L3级自动驾驶接管过程驾驶员情景意识研究[J]. 吉林大学学报(工学版), 2024, 54(2): 410-418. |
| [15] | 吴骁,史文库,郭年程,赵燕燕,陈志勇,李鑫鹏,孙卓,刘健. 基于Ease off的准双曲面齿轮多目标优化[J]. 吉林大学学报(工学版), 2024, 54(1): 76-85. |
|