吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (8): 2141-2148.doi: 10.13229/j.cnki.jdxbgxb.20221380
汽车变曲率路径循迹H∞回路成形鲁棒控制
常胜1( ),刘宏飞2(),邹乃威3
),刘宏飞2(),邹乃威3
- 1.常熟理工学院 汽车工程学院,江苏 苏州 215500
2.吉林大学 交通学院,长春 130022
3.宁波工程学院 机械工程学院,浙江 宁波 315336
H∞ loop shaping robust control of vehicle tracking on variable curvature curve
Sheng CHANG1(),Hong-fei LIU2(),Nai-wei ZOU3
- 1.School of Automotive Engineering,Changshu Institute of Technology,Suzhou 215500,China
2.College of Transportation,Jilin University,Changchun 130022,China
3.College of Mechanical Engineering,Ningbo University of Technology,Ningbo 315336,China
摘要:
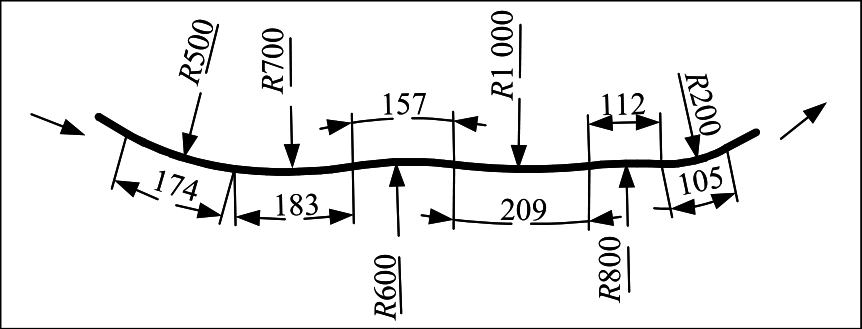
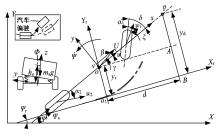
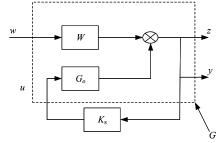
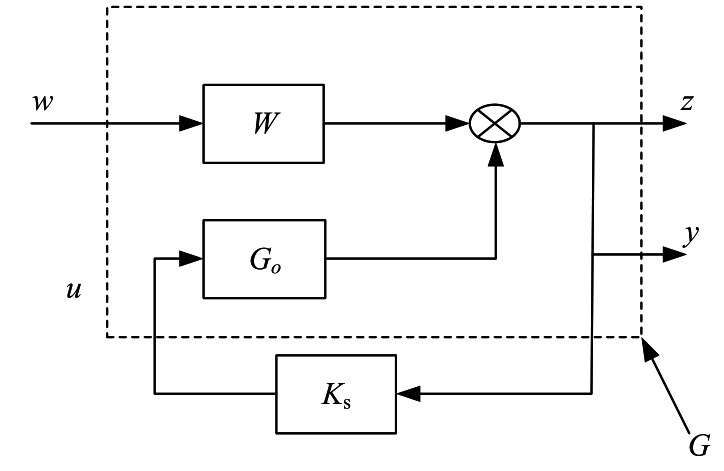
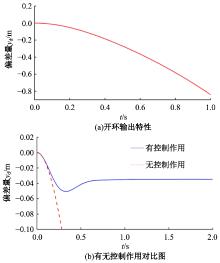
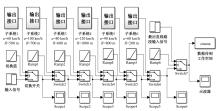
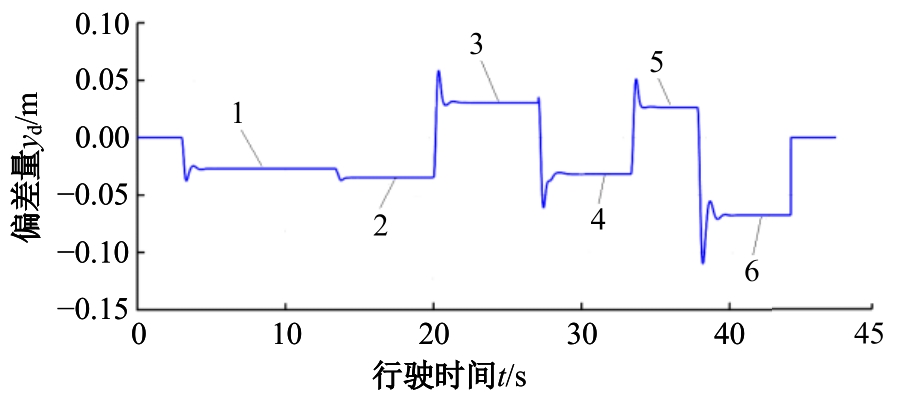
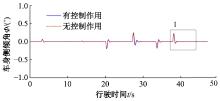
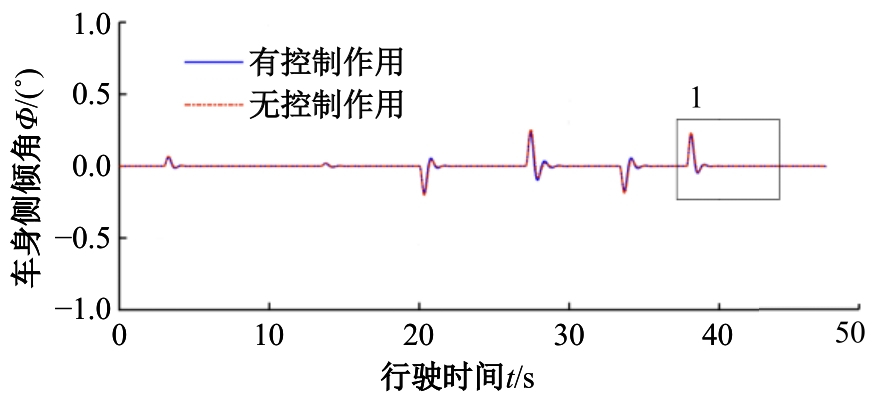
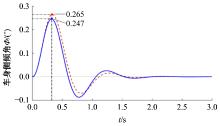
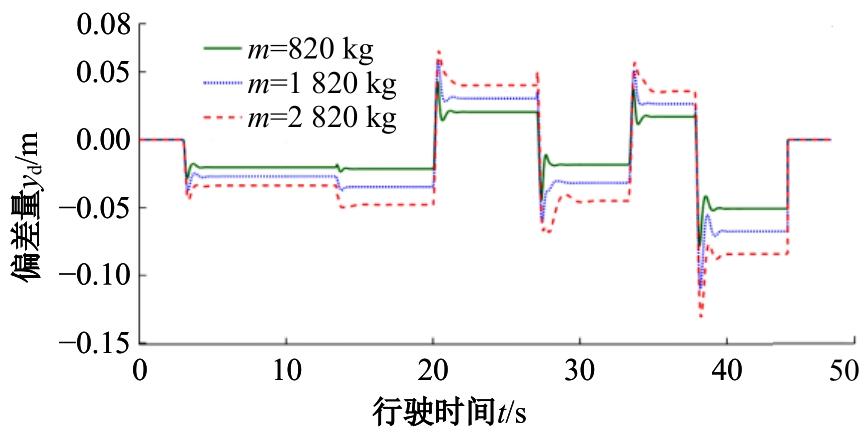
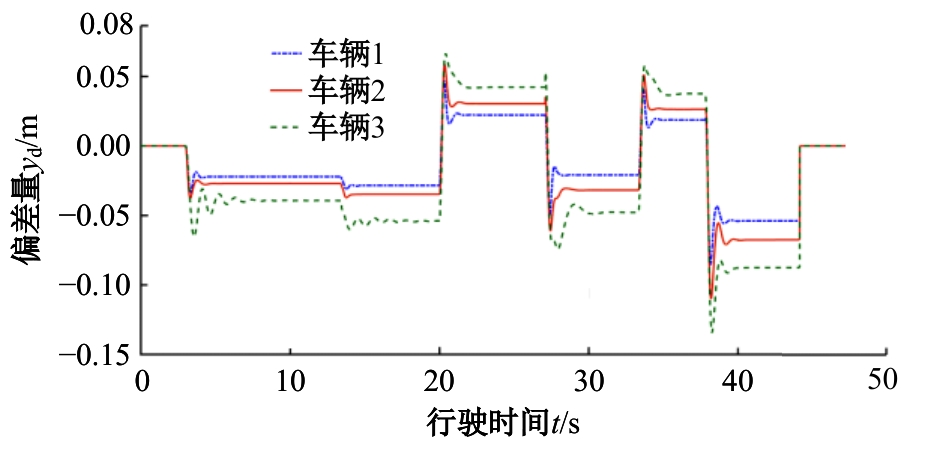
针对汽车曲线行驶时曲率半径改变更易引起车辆偏离预定轨迹的问题,提出了一种基于H∞回路成形的鲁棒控制方法以提高汽车轨迹跟踪性能。首先,对汽车动力学模型进行处理,使模型具备广义干扰控制系统形态,利用传递函数运算间接求解获得所需的输出变量;其次,选定标称受控对象给出标称条件,据此设计鲁棒控制器使闭环系统各反馈回路获得理想的奇异值,满足系统性能指标和鲁棒稳定性要求;最后,验证汽车在变曲率曲线路径上的循迹能力。结果表明:在固定鲁棒控制器作用下汽车具备稳定的抗干扰能力,当系统参数在合理范围内变化时,汽车行驶的横向偏差量均控制在0.2 m以内。
中图分类号:
- U461.6





| 1 | 陈特,陈龙,徐兴,等. 分布式驱动无人车路径跟踪与稳定性协调控制[J]. 汽车工程, 2019, 41(10): 1109-1116. |
| Chen Te, Chen Long, Xu Xing, et al. Integrated control of unmanned distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019, 41(10): 1109-1116. | |
| 2 | 余卓平,侯誉烨,熊璐,等. 基于反步法的差动转向无人车辆轨迹跟踪[J]. 汽车工程,2019, 41(11): 1229-1234. |
| Yu Zhuo-ping, Hou Yu-ye, Xiong Lu, et al. Trajectory tracking of skid steer unmanned vehicle based on backstepping[J]. Automotive Engineering, 2019, 41(11): 1229-1234. | |
| 3 | 孙浩,杜煜,卜德旭,等. 汽车轨迹跟踪模型预测控制的加速求解方法[J]. 湖南大学学报: 自然科学版, 2020, 47(10): 19-25. |
| Sun Hao, Du Yu, Bu De-xu, et al. Accelerated Solution method for vehicle trajectory tracking based on model predictive control[J]. Journal of Hunan University (Natural Sciences), 2020, 47(10): 19-25. | |
| 4 | 赵熙俊,陈慧岩. 智能车辆路径跟踪横向控制方法的研究[J]. 汽车工程, 2011, 33(5): 382-387. |
| Zhao Xi-jun, Chen Hui-yan. A study on lateral control method for the path tracking of intelligent vehicles[J]. Automotive Engineering, 2011, 33(5): 382-387. | |
| 5 | Chang S, Chen L L, Wu J F, et al. H∞ loop shaping robust control for tractor-semitrailer[C]//MATEC Web of Conferences ICMME2015. SINGAPORE: EDP Sciences, 2015: 05005p.1-05005p.5. |
| 6 | Mcfarlane D C, Glover K. Robust stabilization of normalized coprime factor plant descriptions with H∞- bounded uncertainty[J]. IEEE Transactions on Automatic Control, 1989, 34(8): 821-830. |
| 7 | Mcfarlane D C, Glover K. A loop shaping design procedure using H∞ synthesis[J]. IEEE Transactions on Automatic Control, 1992, 37(6): 759-769. |
| 8 | Zhou, K, Doyle J C. Essentials of Robust Control[M]. NY: Prentice-Hall, 1998. |
| 9 | 常胜,许洪国,刘宏飞. H∞回路成形半挂汽车列车鲁棒控制器设计[J]. 吉林大学学报: 工学版, 2011, 41(6): 1571-1576. |
| Chang Sheng, Xu Hong-guo, Liu Hong-fei. H∞ loop shaping robust controller design for tractor-semitrailer[J]. Journal of Jilin University (Engineering and Technology Edition), 2011, 41(6): 1571-1576. | |
| 10 | 常胜. 半挂汽车列车动态特性分析与鲁棒控制[D]. 长春:吉林大学交通学院, 2011. |
| Chang Sheng. Dynamic characteristics analysis and robust control of tractor-semitrailer[D]. Changchun: College of Transportation, Jilin University, 2011. | |
| 11 | ,中华人民共和国交通运输部公路线路设计规范 [S]. |
| [1] | 王玉海,李晓之,李兴坤. 面向高速工况的混合动力卡车预见性节能算法[J]. 吉林大学学报(工学版), 2024, 54(8): 2121-2129. |
| [2] | 刘建泽,柳江,李敏,章新杰. 基于最小二乘的车速解耦路面辨识方法[J]. 吉林大学学报(工学版), 2024, 54(7): 1821-1830. |
| [3] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [4] | 刘从臻,陈高,刘洪柱,马强,徐成伟,孟辉,王国林. 湿滑路面轮胎接地力学特性模型[J]. 吉林大学学报(工学版), 2024, 54(6): 1501-1511. |
| [5] | 黄玲,崔躜,游峰,洪佩鑫,钟浩川,曾译萱. 适用于多车交互场景的车辆轨迹预测模型[J]. 吉林大学学报(工学版), 2024, 54(5): 1188-1195. |
| [6] | 郭洪艳,王连冰,赵旭,戴启坤. 考虑侧向运动的整车质量与道路坡度估计[J]. 吉林大学学报(工学版), 2024, 54(5): 1175-1187. |
| [7] | 陆玉凯,袁帅科,熊树生,朱绍鹏,张宁. 汽车漆面缺陷高精度检测系统[J]. 吉林大学学报(工学版), 2024, 54(5): 1205-1213. |
| [8] | 汪少华,张启睿,施德华,殷春芳,李春. 双行星排式混合动力传动系统非线性振动响应特性分析[J]. 吉林大学学报(工学版), 2024, 54(4): 890-901. |
| [9] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [10] | 谢宪毅,王禹涵,金立生,赵鑫,郭柏苍,廖亚萍,周彬,李克强. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3): 620-630. |
| [11] | 邓小林,杨馥模,覃善甘. 新型仿竹六边形梯度层级多胞管耐撞性对比分析[J]. 吉林大学学报(工学版), 2024, 54(2): 333-345. |
| [12] | 王毅刚,王玉鹏,张昊,赵思安. 高速列车转向架区域气动噪声源识别与分析[J]. 吉林大学学报(工学版), 2024, 54(2): 346-355. |
| [13] | 聂建军,侯军凯,解晓琳,鄢鸿桢. 新型巡检机器人移动底盘设计及越障性能分析[J]. 吉林大学学报(工学版), 2024, 54(2): 356-364. |
| [14] | 胡宏宇,张慧珺,姚荣涵,陈国迎,高菲. L3级自动驾驶接管过程驾驶员情景意识研究[J]. 吉林大学学报(工学版), 2024, 54(2): 410-418. |
| [15] | 吴骁,史文库,郭年程,赵燕燕,陈志勇,李鑫鹏,孙卓,刘健. 基于Ease off的准双曲面齿轮多目标优化[J]. 吉林大学学报(工学版), 2024, 54(1): 76-85. |
|