吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (6): 1892-1905.doi: 10.13229/j.cnki.jdxbgxb.20231023
多向运动寄生载荷分量对称重传感输出的影响
郭贵勇1,2,3,4,5( ),钟剑锋1,2(),张秋坤1,2,蔡宝杰3,4,5
),钟剑锋1,2(),张秋坤1,2,蔡宝杰3,4,5
- 1.福州大学 机械工程及自动化学院,福州 350108
2.福州大学 福建省太赫兹功能器件与智能传感重点实验室,福州 350108
3.福建省计量科学研究院 建设与交通计量研究所,福州 350003
4.福建省力值计量测试重点实验室,福州 350100
5.国家市场监管重点实验室(力值计量测试),福州 350100
Effect of parasitic load components with multi⁃directional motion on weight⁃sensing outputs
Gui-yong GUO1,2,3,4,5(),Jian-feng ZHONG1,2(),Qiu-kun ZHANG1,2,Bao-jie CAI3,4,5
- 1.School of Mechanical Engineering and Automation,Fuzhou University,Fuzhou 350108,China
2.Fujian Provincial Key Laboratory of Terahertz Functional Devices and Intelligent Sensing,Fuzhou University,Fuzhou 350108,China
3.Division of Construction and Transportation,Fujian Institute of Metrology,Fuzhou 350003,China
4.Fujian Key Laboratory of Force Measurement,Fuzhou 350100,China
5.Key Laboratory of Force Measurement for State Market Regulation,Fuzhou 350100,China
摘要:
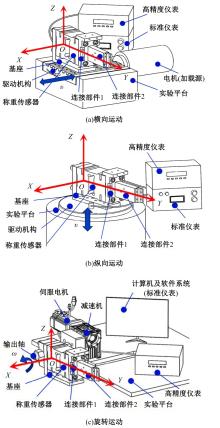
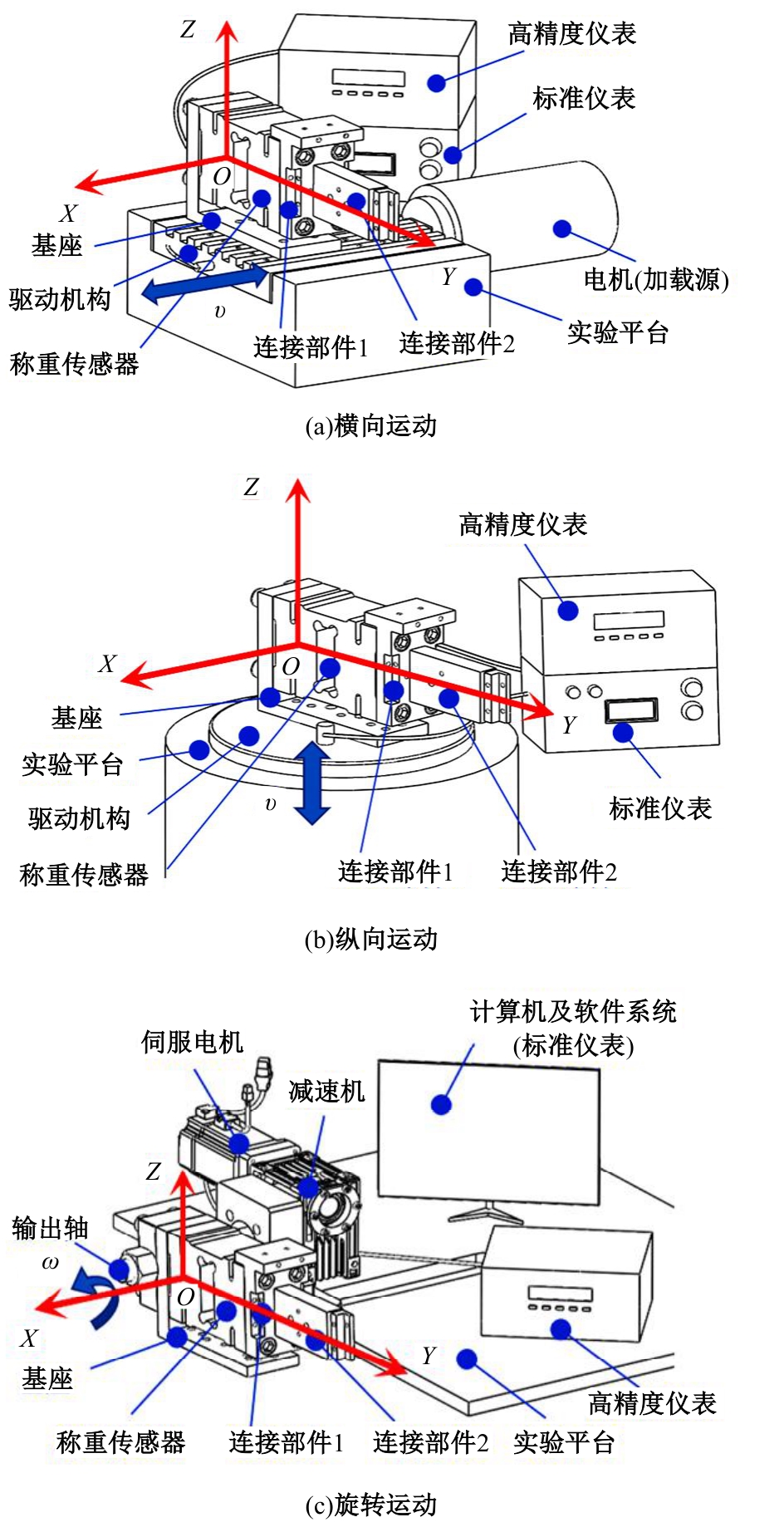
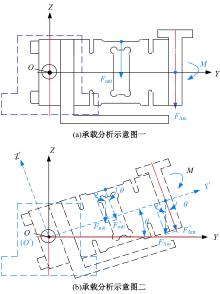
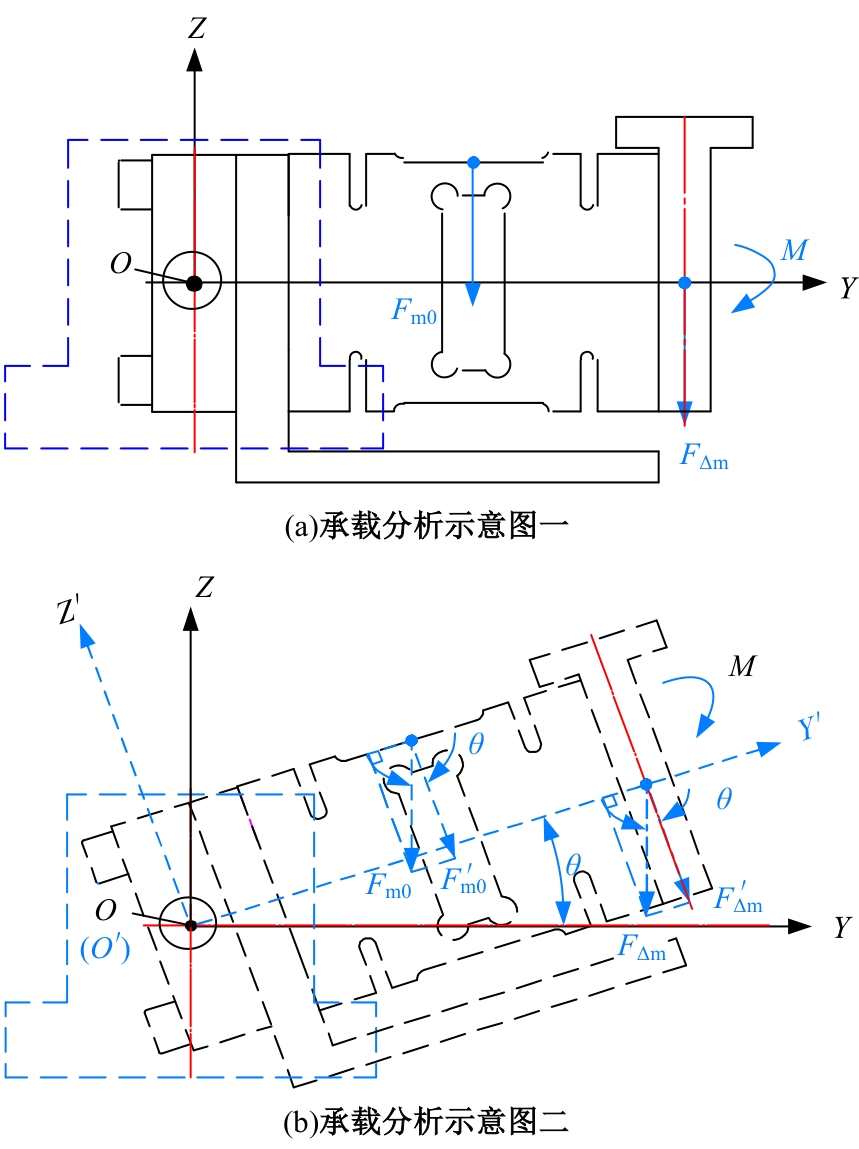
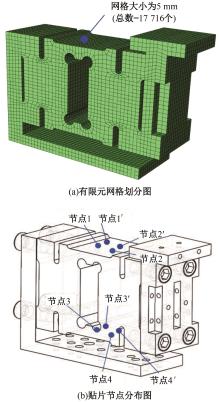
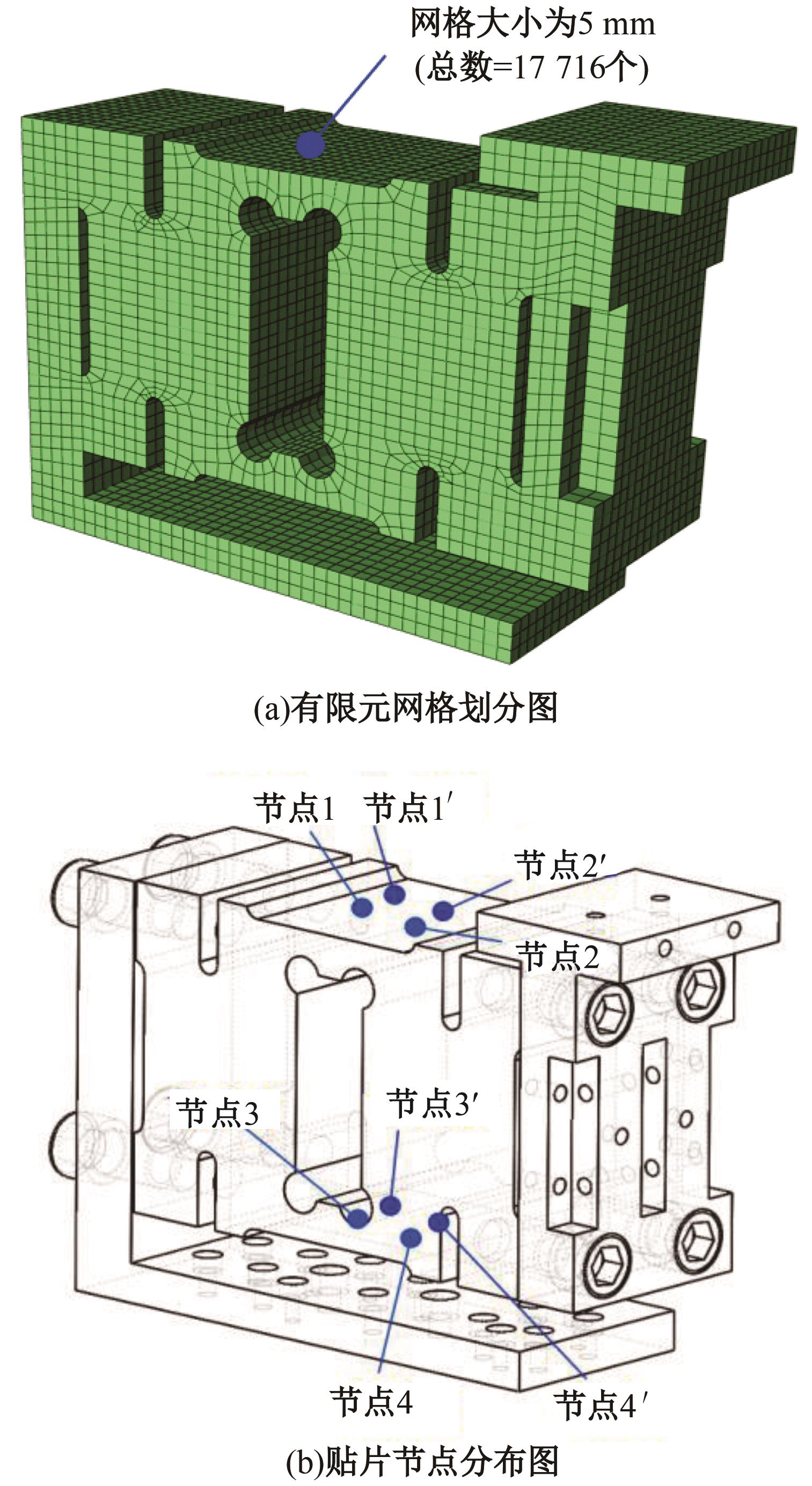
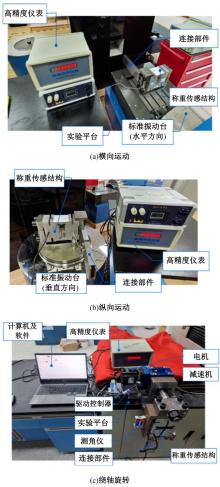
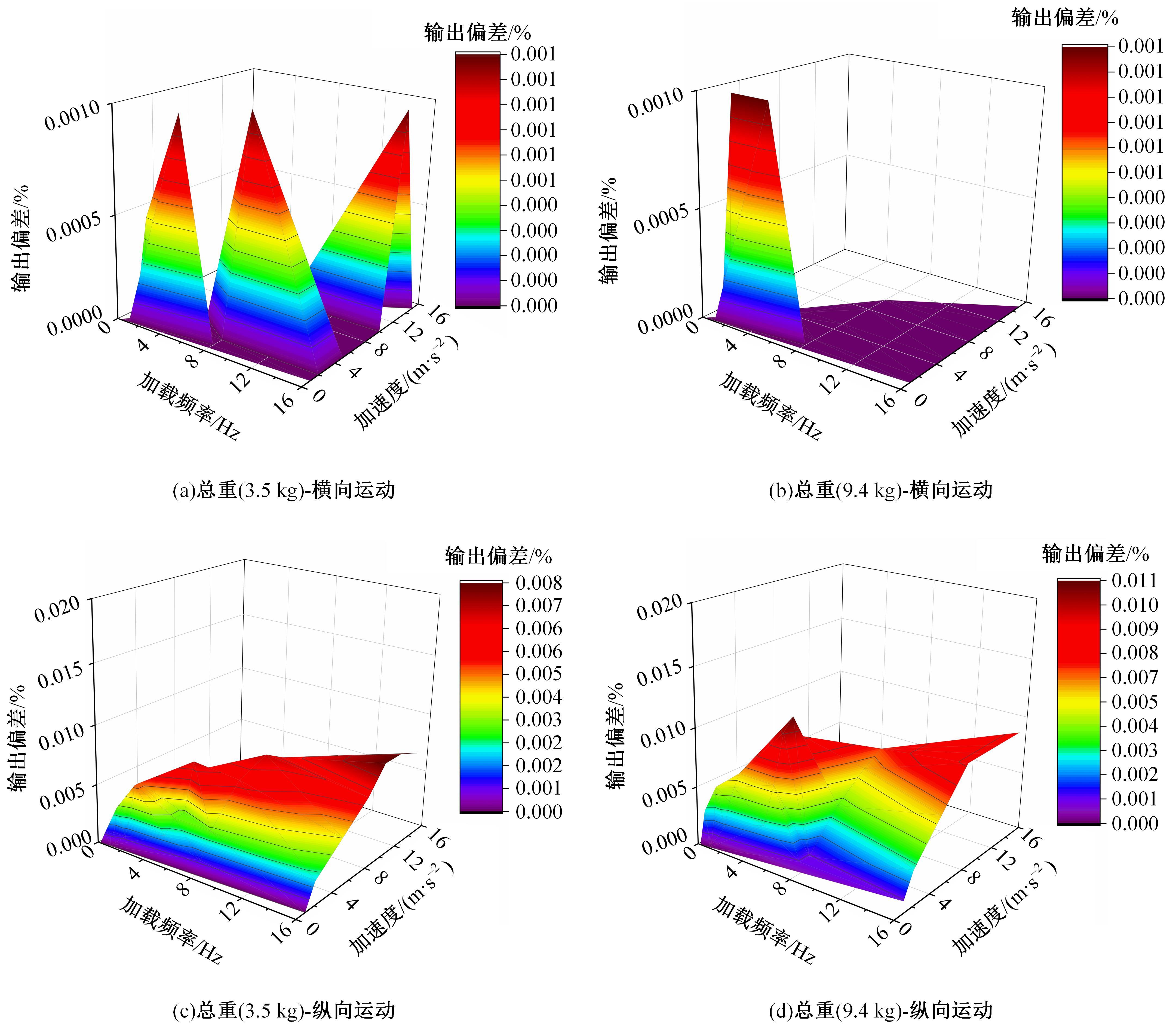
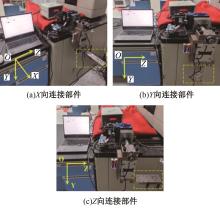
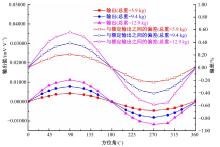
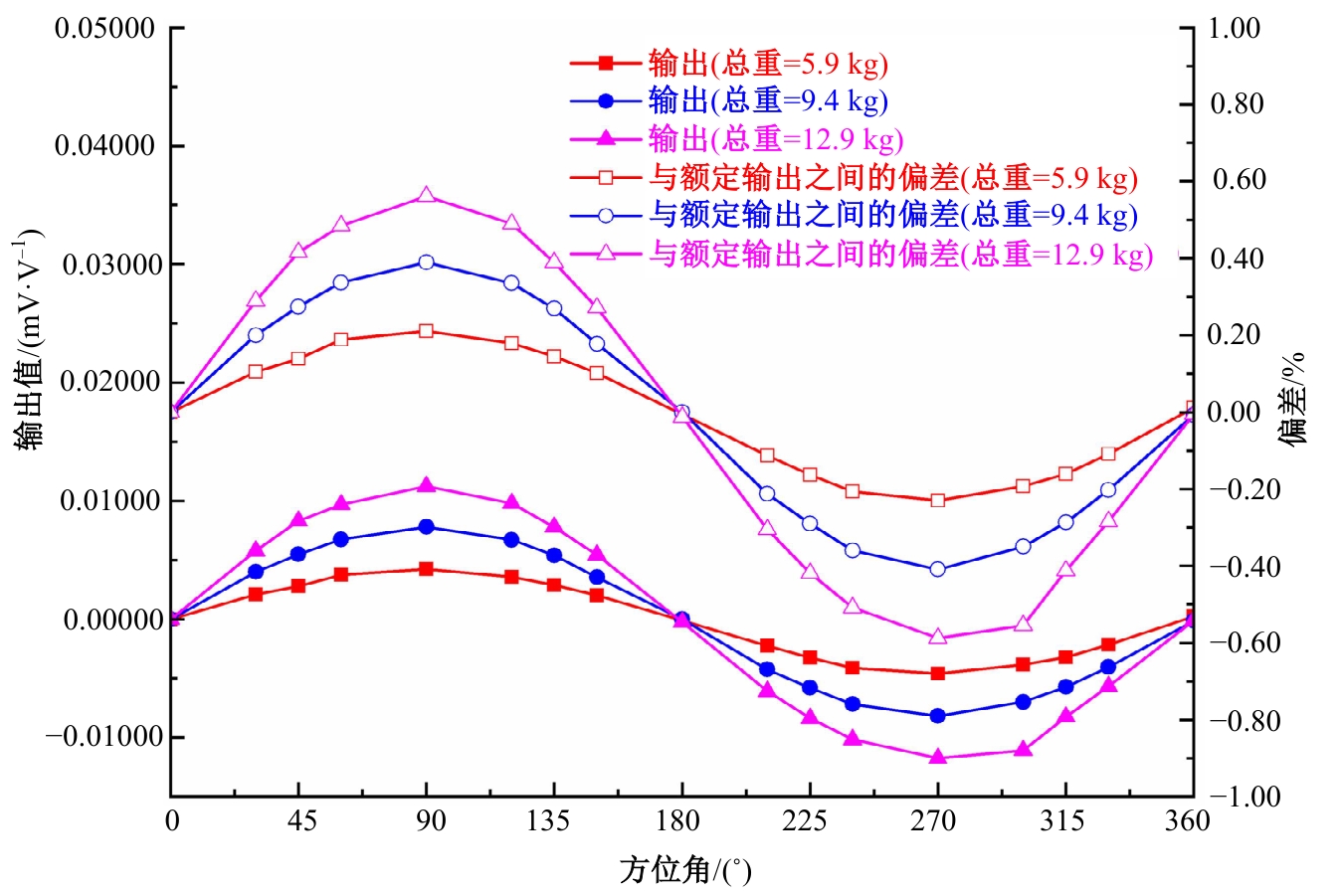
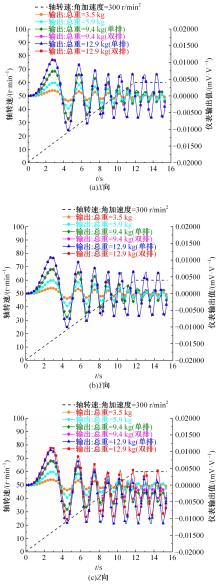
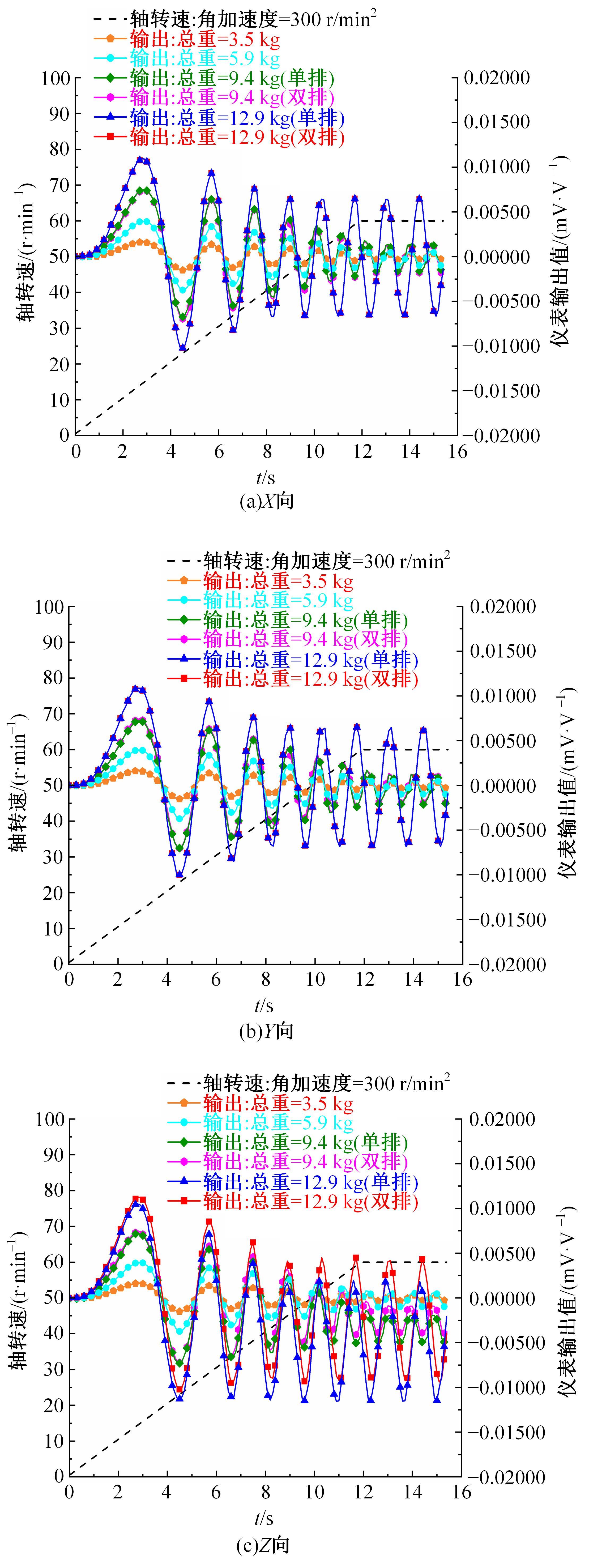
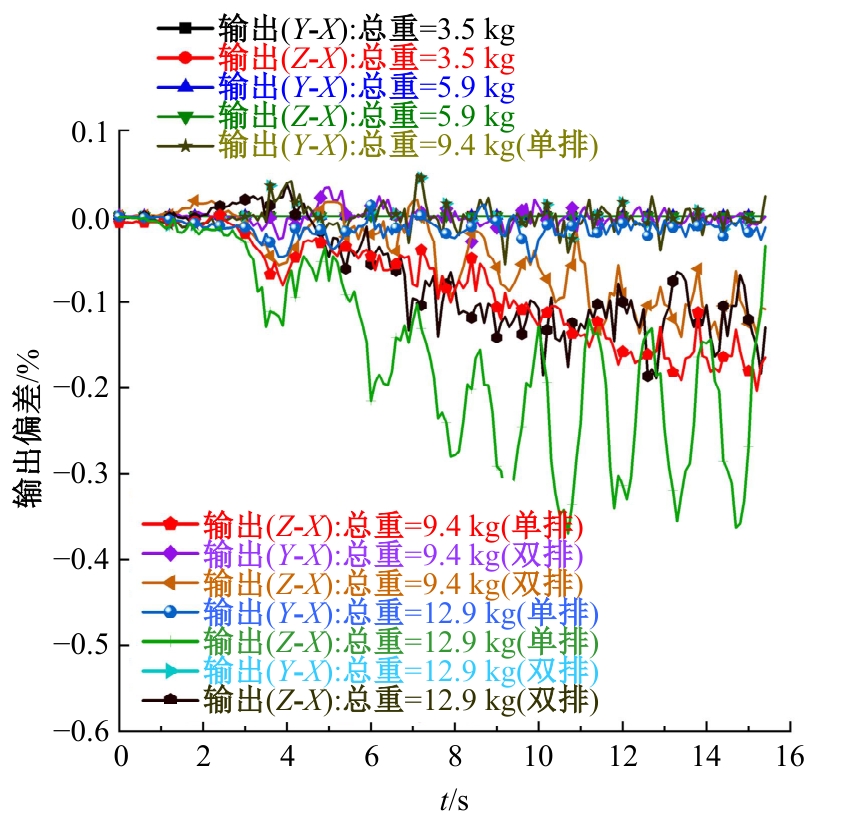
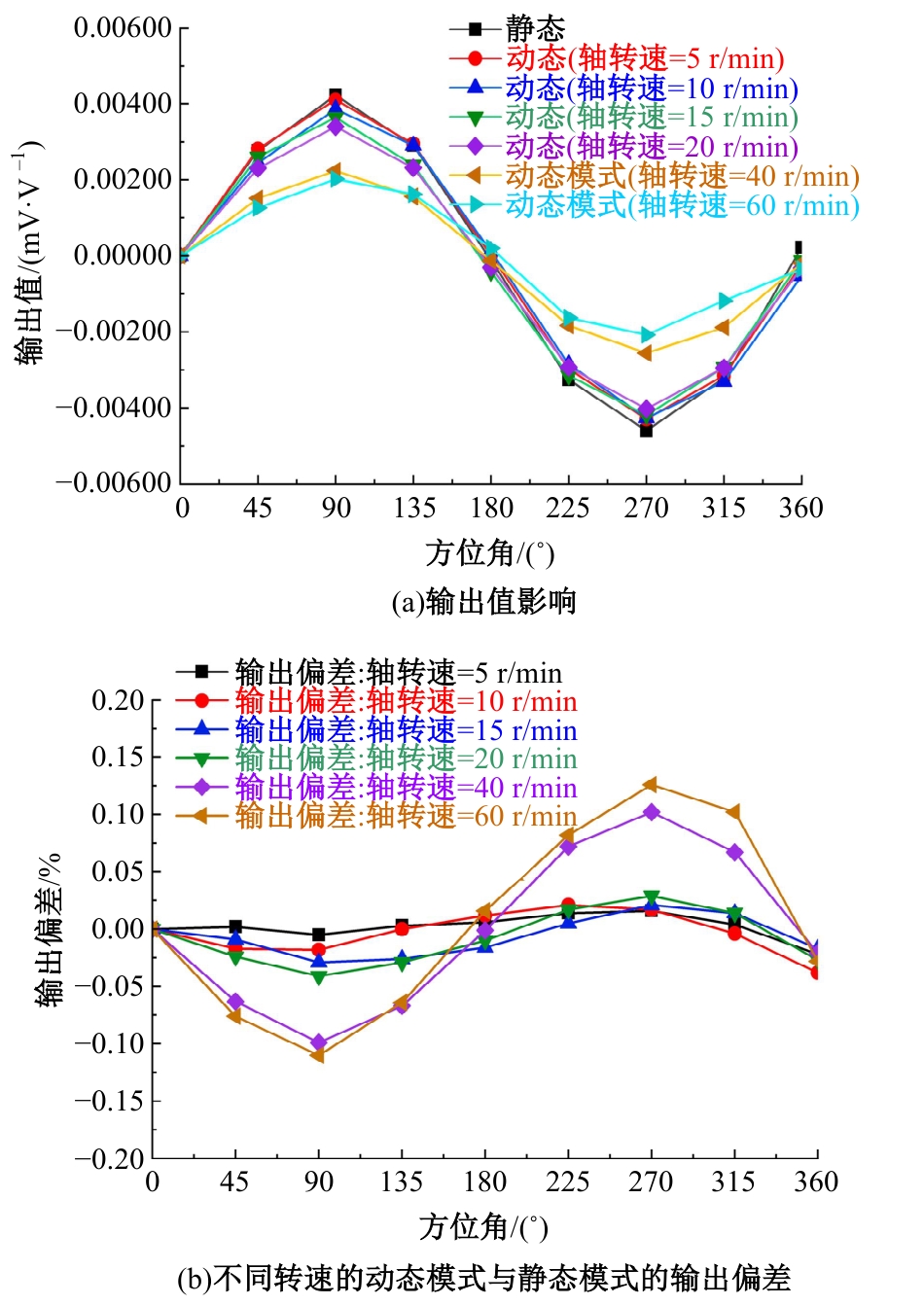
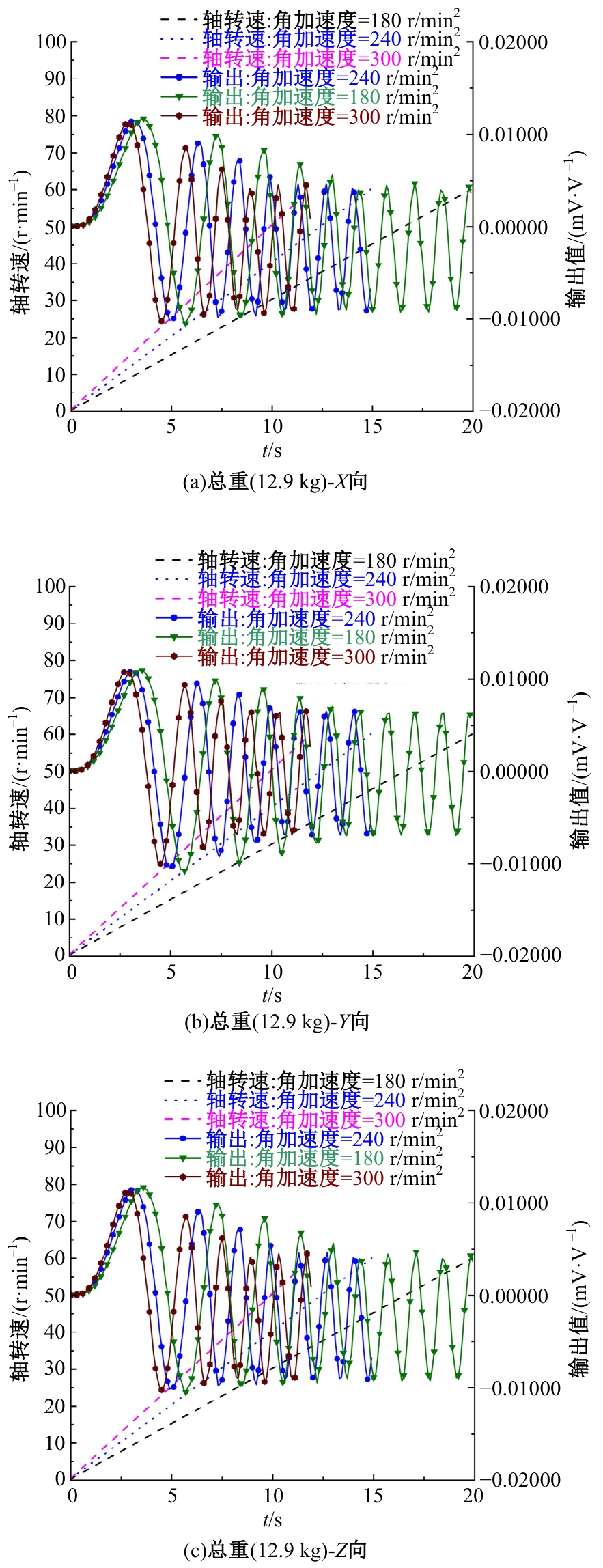
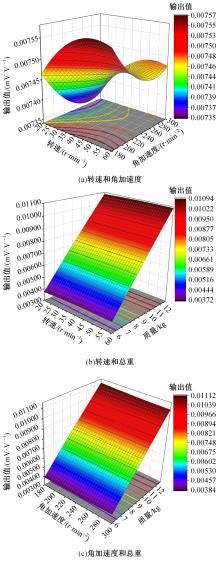
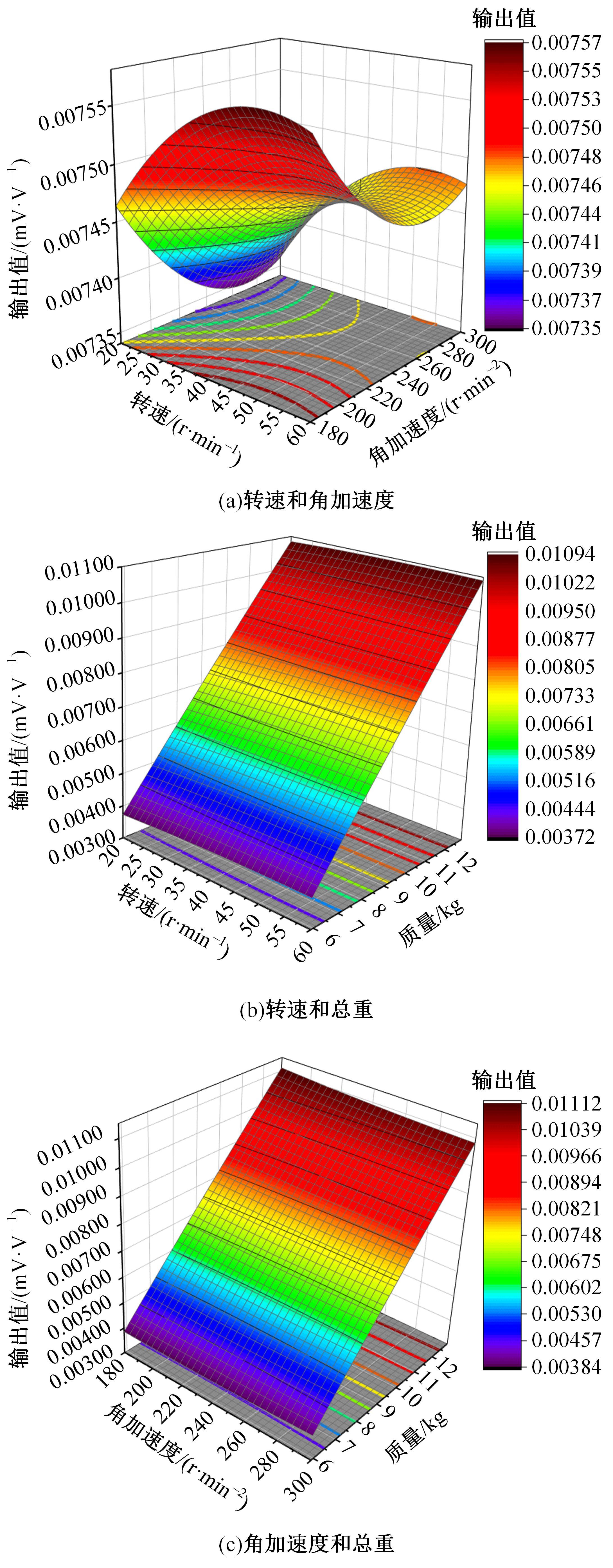
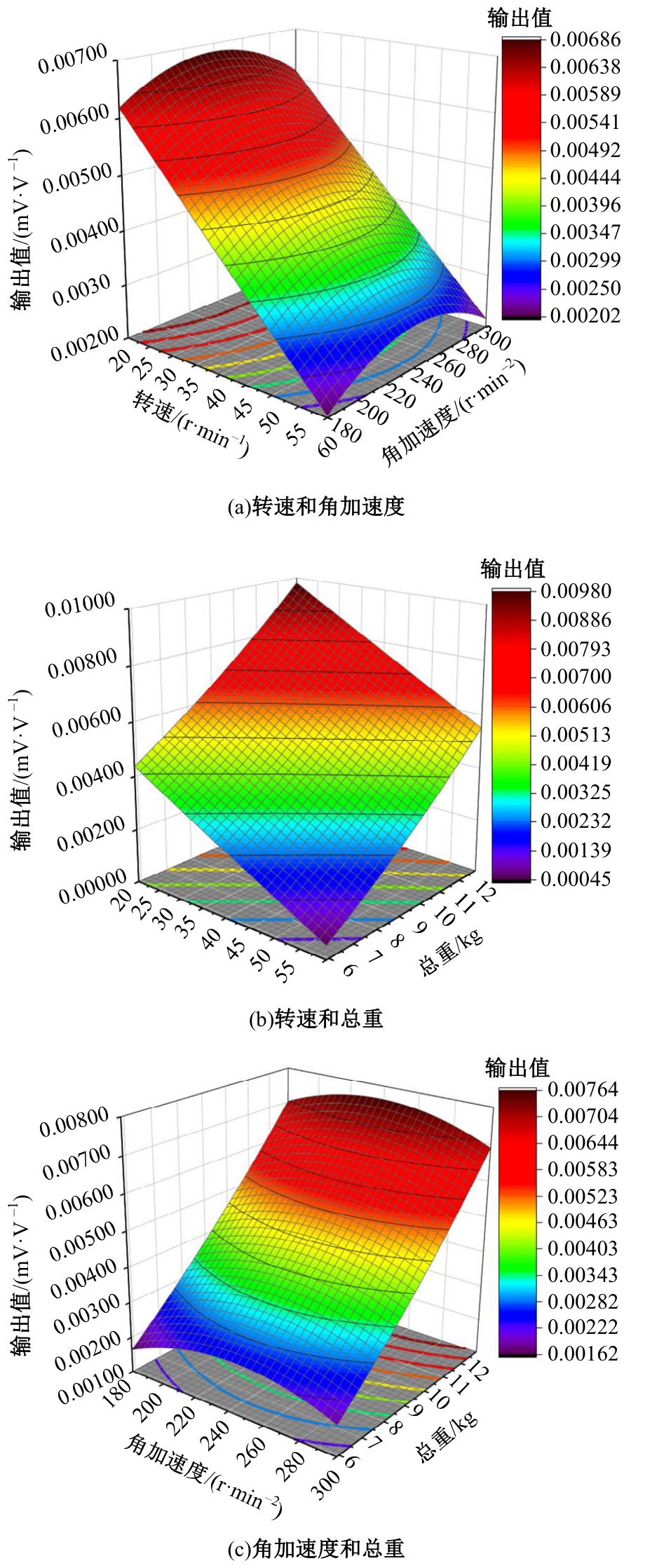
针对多向运动寄生载荷分量对称重传感输出影响很大的问题,提出了基于整体结构的变参数、多分量的输出影响评估方法,建立了“应变-总重-运动”瞬时特征的数学理论模型,并通过有限元仿真分析探讨了称重过程中常见的横向、纵向及绕轴旋转等运动特性,以及改变总重、旋转速度和角加速度等寄生载荷分量对输出的影响,通过实验测试验证理论模型及仿真分析规律的合理性。结果表明,横向运动寄生载荷分量对输出影响最小,最大偏差不大于0.001%FS(Full Scale);其次为纵向运动,最大偏差不大于0.015%FS;而绕轴旋转的运动寄生载荷分量对输出影响最大,最大偏差可达0.5%FS,且随着总重、旋转速度的变化而变化,该规律为称重传感结构的动态称重应用提供了精度补偿技术支撑和科学评价依据。
中图分类号:
- TH715

| [1] | 朱建梅, 黄松和. 平行梁式称重传感器的动态仿真分析[J]. 机械, 2014, 41(11): 31-35, 76. |
| Zhu Jian-mei, Huang Song-he. Dynamic simulation analysis of parallel girder load sensor[J]. Machinery, 2014, 41(11): 31-35, 76. | |
| [2] | 张业兵. 运动速度对动态称重的影响[J]. 山东理工大学学报: 自然科学版, 2007, 21(2): 41-44, 47. |
| Zhang Ye-bin. The influence of vehicle speed on weigh-in-motion[J]. Journal of Shandong University of Technology (Natural Science Edition), 2007, 21(2): 41-44, 47. | |
| [3] | 尹继武, 龙姝明. 应变片倾斜角度对称重传感器偏载误差的影响[J]. 陕西理工学院学报: 自然科学版, 2014, 30(2): 19-23. |
| Yin Ji-wu, Long Shu-ming. Influence of strain gauge tilt angle on eccentric error of load sensor[J].Journal of Shaanxi University of Technology (Natural Science Edition), 2014, 30(2): 19-23. | |
| [4] | 郁有文, 常健, 程继红. 传感器原理及工程应用[M]. 4版. 西安: 西安电子科技大学出版社, 2014. |
| [5] | 赵思宏, 田春艳, 范惠林. 平行梁式称重传感器的有限元分析[J]. 光学精密工程, 2002, 10(2): 209-213. |
| Zhao Si-hong, Tian Chun-yan, Fan Hui-lin. Finite element analysis of the parallel girder load sensor [J]. Optics and Precision Engineering, 2002, 10(2): 209-213. | |
| [6] | 何兆湘, 黄兆祥, 王楠. 传感器原理与检测技术[M]. 武汉: 华中科技大学出版社, 2019. |
| [7] | 郑韬, 俞宁峰, 连昌伟. 应变计式力传感器对高速拉伸载荷振荡的改善[J]. 锻压技术, 2019, 44(8): 124-128, 136. |
| Zheng Tao, Yu Ning-feng, Lian Chang-wei. Improvement of load oscillation in high-speed tension by strain gauge force sensor[J]. Forging & Stamping Technology, 2019, 44(8): 124-128, 136. | |
| [8] | Mocanu S, Panaitescu R, Tonciu O, et al. Influence of the parallel beam load cell installation on the strain/stress field reading error[J].Romanian Journal of Transport Infrastructure, 2023, 12(1): 1-13. |
| [9] | 干方建, 刘正士, 孔凡让, 等. 传感器微分运动引起的机器人运动误差及其在线补偿[J]. 中国机械工程, 2005(23): 2069-2071. |
| Gan Fang-jian, Liu Zheng-shi, Kong Fan-rang, et al. On-line compensation of robot motion errors based on multi-axis force sensor's deformation[J]. China Mechanical Engineering, 2005(23): 2069-2071. | |
| [10] | 陈浩文, 李坚, 王兵, 等 . 机器人交互作业中六维力传感器重力补偿研究[J]. 组合机床与自动化加工技术, 2021(10): 47-51. |
| Chen Hao-wen, Li Jian, Wang Bing, et al. Research on gravity compensation of six-axis force sensor in robot interactive operation[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2021(10):47-51. | |
| [11] | Li J, Guan Y, Chen H, et al. A high-bandwidth end-effector with active force control for robotic pol‐ishing[J]. IEEE Access, 2020, 8: 169122-169135. |
| [12] | Taeyong K, Marco V A, Jaehong S, et al. Development of a differential load cell negating inertial force[J]. Measurement, 2023, 223: No.113789. |
| [13] | 马涛, 马源, 黄晓明 . 基于多元非线性回归的智能压实关键参数最优解[J]. 吉林大学学报: 工学版,2023, 53(7): 2067-2077. |
| Ma Tao, Ma Yuan, Huang Xiao-ming. Optimal combination of key parameters of intelligent compaction based on multiple nonlinear regression[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(7): 2067-2077. |
| [1] | 李玲,田辉涛,妙东浩,解妙霞,程福安. 横向循环载荷下多螺栓连接松弛特性分析[J]. 吉林大学学报(工学版), 2025, 55(5): 1525-1535. |
| [2] | 赵勇,金文明,郑祺峰,寇淑清. 裂解槽深度对减速器壳体轴承座裂解性能的影响[J]. 吉林大学学报(工学版), 2025, 55(5): 1552-1558. |
| [3] | 张安顺,付伟,张军辉,高峰. 长沙压实黏土剪切特性及应力-应变关系表征[J]. 吉林大学学报(工学版), 2025, 55(5): 1604-1616. |
| [4] | 张亮亮,程桦,王晓健. 常规三轴压缩下高强混凝土能量演化和破坏准则[J]. 吉林大学学报(工学版), 2025, 55(3): 974-985. |
| [5] | 陈鑫,张祥源,武子涛,于贵申,杨立飞. 工艺顺序对车用铝薄板胶-PFSSW接头拉剪性能的影响[J]. 吉林大学学报(工学版), 2025, 55(2): 468-475. |
| [6] | 刘海峰,陶仁光,车佳玲,杨维武,朱立晨. 荷载和高温对沙漠砂混凝土单轴抗压性能的影响[J]. 吉林大学学报(工学版), 2024, 54(9): 2609-2619. |
| [7] | 李玲,杜旭阳,王晶晶,阮晓光,蔡安江. 凸面法兰连接下的螺栓载荷均匀性分析[J]. 吉林大学学报(工学版), 2024, 54(9): 2451-2459. |
| [8] | 谭晓丹,王勇澎,Hall Robert,徐天爽,黄庆学. 面向电铲自主装卸的矿用自卸车斗型优化[J]. 吉林大学学报(工学版), 2024, 54(5): 1227-1236. |
| [9] | 张云佐,郭威,李文博. 遥感图像密集小目标全方位精准检测算法[J]. 吉林大学学报(工学版), 2024, 54(4): 1105-1113. |
| [10] | 孙敏,朱远恒,高鹏真,李振东,方有珍. 多降雨环境下锈蚀钢筋混凝土柱装配节点抗震性监测[J]. 吉林大学学报(工学版), 2024, 54(12): 3545-3551. |
| [11] | 李彦清,卢升旭,李永洲,黄明智,黄涛. 双锥形铜合金药型罩旋压工艺仿真与实验验证[J]. 吉林大学学报(工学版), 2024, 54(11): 3148-3157. |
| [12] | 李旭东,王新宇,田程,张新峰,牛治慧,赵志强. 基于用户关联的车辆耐久性载荷谱编制[J]. 吉林大学学报(工学版), 2024, 54(1): 66-75. |
| [13] | 王铁,李旭东,田程,赵宏伟. 基于多轴载荷投影构建轮辋双轴疲劳损伤模型[J]. 吉林大学学报(工学版), 2024, 54(1): 99-104. |
| [14] | 刘方成,王将,吴孟桃,补国斌,何杰. 土工格栅加筋橡胶砂应力-应变特性试验[J]. 吉林大学学报(工学版), 2023, 53(9): 2542-2553. |
| [15] | 蔡安江,刘晨阳,王沛彭. 旋转角度优化下的五轴数控机床后置处理算法[J]. 吉林大学学报(工学版), 2023, 53(9): 2493-2498. |
|