吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (8): 2782-2790.doi: 10.13229/j.cnki.jdxbgxb.20231309
• 通信与控制工程 • 上一篇
机械手多任务均衡策略
朱科1,2( ),邢志明1,康翔宇1
),邢志明1,康翔宇1
- 1.上海理工大学 光电信息与计算机工程学院,上海 200093
2.江苏镭神智造科技有限公司,江苏 无锡 214142
Multi task balancing strategy for robot manipulators
Ke ZHU1,2(),Zhi-ming XING1,Xiang-yu KANG1
- 1.School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China
2.Jiangsu Raysmart Intelligent Manufacturing Technology Co. ,Ltd. ,Wuxi 214142,China
摘要:
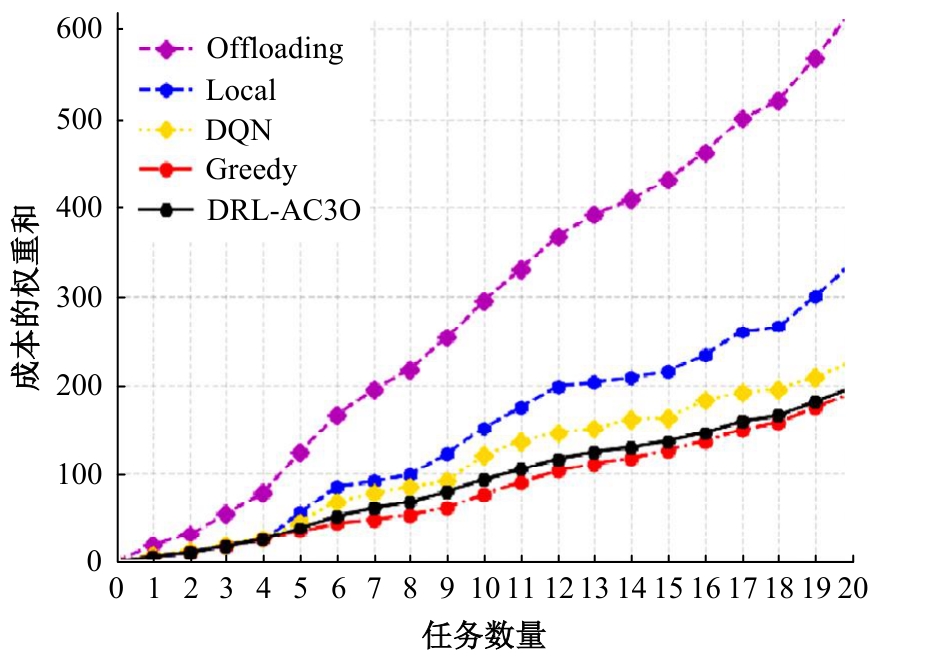
并联机械手可实现高精度抓取和搬运动态物体,目前在智能工厂广泛应用。在物料输送过程中,单一机械手很难保证物料的无漏性,因此如何实现多机械手协同作业是一个亟待解决的问题。本文基于深度强化学习(DQN)算法提出最小化成本目标函数,并结合行动者-批评者算法对本研究算法进行改进,同时提出均衡优势函数以最大化优化均衡执行策略。实验显示,本研究算法的收敛性能提高17.1%。在既定实验条件下,与基线算法相比,本算法总成本降低约31.6%,显著提高了机械手在多任务场景下的整体执行效率。
中图分类号:
- TP241


| [1] | 张映锋, 张党, 任杉. 智能制造及其关键技术研究现状与趋势综述[J]. 机械科学与技术, 2019, 38(3):329-338. |
| Zhang Ying-feng, Zhang Dang, Ren Shan. Survey on current research and future trends of smart manufacturing and its key technologies[J]. Mechanical Science and Technology for Aerospace Engineering,2019, 38(3): 329-338. | |
| [2] | Parikh P J, Lam S S Y. A hybrid strategy to solve the forward kinematics problem in parallel manipulators[J]. IEEE Transactions on Robotics, 2005, 21(1):18-25. |
| [3] | 国家制造强国建设战略咨询委员会. 中国制造2025蓝皮书[M]. 北京: 电子工业出版社, 2016. |
| National Manufacturing Power Construction Strategy Advisory Committee. China manufacturing 2025 bluebook[M]. Beijing: Electronic Industry Press,2016. | |
| [4] | Chen X Y, Ren G Q. Key technologies and development trends of intelligent manufacturing and robot application[J]. IOP Conference Series: Earth and Environmental Science,2020,461(1): 012049. |
| [5] | 管声启, 张理博, 刘通, 等. 基于改进粒子群算法的机械手抓取力自整定模糊PID控制[J].西安工程大学学报,2024,25(2):1-8. |
| Guan Sheng-qi, Zhang Li-bo, Liu Tong, et al. Self-tuning fuzzy PID control of manipulator grasping force based on improved particle swarm optimization algorithm[J]. Journal of Xi'an Polytechnic University,2024,25(2):1-8. | |
| [6] | 郭美君. 机械手控制系统的研究与应用[J]. 电动工具, 2023(6): 24-26. |
| Guo Mei-jun. Research and application of manipulator control system[J].Electric Tools,2023(6):24-26. | |
| [7] | 卢志琦. 基于卷积神经网络的煤矿支架搬运车轮胎助力机械手抓取姿态规划方法[J]. 煤矿机械, 2024,45(2): 179-182. |
| Lu Zhi-qi. Grasping attitude planning method of tire assisted manipulator of support truck in coal mine based on convolutional neural network[J].Coal Mine Machinery, 2024, 45(2): 179-182. | |
| [8] | 蒋智蓓, 张松亚, 邓佳成, 等. 基于计算机视觉的机械手包裹分拣与放置系统[J]. 机电工程技术, 2024, 53(1): 212-215. |
| Jiang Zhi-bei, Zhang Song-ya, Deng Jia-cheng, et al. A robot parcel sorting and placement system based on computer vision[J].Mechanical & Electrical Engineering Technology, 2024, 53(1): 212-215. | |
| [9] | Chen X Y, Ren G Q. Key technologies and development trends of intelligent manufacturing and robot application[J]. IOP Conference Series: Earth and Environmental Science,2020,461(1): 012049. |
| [10] | 姚国林, 王合闯. 改进的APF算法在采摘机械手运动规划中的应用[J]. 机床与液压, 2023, 51(23):65-72. |
| Yao Guo-lin, Wang He-chuang. Application of improved APF algorithm in motion planning of picking manipulator[J]. Machine Tool & Hydraulics, 2023,51(23): 65-72. | |
| [11] | 张明文, 于振中. 工业机器人原理及应用:DELTA 并联机器人[M]. 哈尔滨: 哈尔滨工业大学出版社,2018. |
| Zhang Ming-wen, Yu Zhen-zhong. Principles and Applications of Industrial Robots: DELTA Parallel Robots[M]. Harbin: Harbin Institute of Technology Press,2018. | |
| [12] | 张英坤. Delta并联机器人的研究进展[J]. 机床与液压, 2016, 44(21): 16-20. |
| Zhang Ying-kun. Research progress and status of Delta parallel robot[J]. Machine Tool & Hydraulics, 2016, 44(21): 16-20. | |
| [13] | 许礼进, 刘有余, 刘阳. DELTA机器人逆运动学的分析与控制[J]. 制造业自动化, 2014, 36(17): 66-69. |
| Xu Li-jin, Liu You-yu, Liu Yang. Inverse-kinematic analysis and control of a DELTA robot[J]. Manufacturing Automation, 2014, 36(17): 66-69. | |
| [14] | 张颖, 赵建国, 沈鑫, 等. Delta并联机器人的运动学分析及虚拟样机仿真[J]. 计量与测试技术, 2019, 46(11): 20-24. |
| Zhang Ying, Zhao Jian-guo, Shen Xin, et al. The kinematic analysis and virtual prototyping simulation of a Delta parallel manipulator[J].Metrology & Measurement Technique, 2019, 46(11): 20-24. | |
| [15] | 车林仙. 6-CPS正交并联机器人位置正解分析[J].农业机械学报, 2009, 40(11): 212-218. |
| Che Lin-xian. Forward positional analysis of 6-CPS orthogonal parallel manipulators[J]. Transactions of the Chinese Society of Agricultural Machinery, 2009,40(11): 212-218. | |
| [16] | 罗玉坤, 周健, 李立君, 等. 基于旋量理论的4-R(SS) 2 并联机器人正运动学分析[J]. 机床与液压, 2018, 46(3): 33-37. |
| Luo Yu-kun, Zhou Jian, Li Li-jun, et al. Direct kinematic analysis of 4-R(SS) 2 parallel robot based on screw theory[J]. Machine Tool & Hydraulics, 2018, 46(3): 33-37. |
| [1] | 申自浩,高永生,王辉,刘沛骞,刘琨. 面向车联网隐私保护的深度确定性策略梯度缓存方法[J]. 吉林大学学报(工学版), 2025, 55(5): 1638-1647. |
| [2] | 谭乐婷,邓慧. 全波形反演下分布式光纤声波传感信号低信噪比自适应任务调度[J]. 吉林大学学报(工学版), 2025, 55(4): 1412-1418. |
| [3] | 闫向彤,杨若冰. 基于白鲨优化算法的压力机械手爪吸附力均衡性控制[J]. 吉林大学学报(工学版), 2025, 55(3): 839-845. |
| [4] | 朱广贺,朱智强,袁逸萍. 连续生产流水线深度强化学习优化调度算法[J]. 吉林大学学报(工学版), 2024, 54(7): 2086-2092. |
| [5] | 高敬鹏,王国轩,高路. 基于异步合作更新的LSTM-MADDPG多智能体协同决策算法[J]. 吉林大学学报(工学版), 2024, 54(3): 797-806. |
| [6] | 张健,李青扬,李丹,姜夏,雷艳红,季亚平. 基于深度强化学习的自动驾驶车辆专用道汇入引导[J]. 吉林大学学报(工学版), 2023, 53(9): 2508-2518. |
| [7] | 田彦涛,季言实,唱寰,谢波. 深度强化学习智能驾驶汽车增广决策模型[J]. 吉林大学学报(工学版), 2023, 53(3): 682-692. |
| [8] | 曲优,李文辉. 基于多任务联合学习的多目标跟踪方法[J]. 吉林大学学报(工学版), 2023, 53(10): 2932-2941. |
| [9] | 庄伟超,丁昊楠,董昊轩,殷国栋,王茜,周朝宾,徐利伟. 信号交叉口网联电动汽车自适应学习生态驾驶策略[J]. 吉林大学学报(工学版), 2023, 53(1): 82-93. |
| [10] | 刘勇,徐雷,张楚晗. 面向文本游戏的深度强化学习模型[J]. 吉林大学学报(工学版), 2022, 52(3): 666-674. |
| [11] | 王忠立,王浩,申艳,蔡伯根. 一种多感知多约束奖励机制的驾驶策略学习方法[J]. 吉林大学学报(工学版), 2022, 52(11): 2718-2727. |
| [12] | 吕帅,刘京. 基于深度强化学习的随机局部搜索启发式方法[J]. 吉林大学学报(工学版), 2021, 51(4): 1420-1426. |
| [13] | 赵亚慧,杨飞扬,张振国,崔荣一. 基于强化学习和注意力机制的朝鲜语文本结构发现[J]. 吉林大学学报(工学版), 2021, 51(4): 1387-1395. |
| [14] | 赵海英,周伟,侯小刚,张小利. 基于多任务学习的传统服饰图像双层标注[J]. 吉林大学学报(工学版), 2021, 51(1): 293-302. |
| [15] | 杨顺,蒋渊德,吴坚,刘海贞. 基于多类型传感数据的自动驾驶深度强化学习方法[J]. 吉林大学学报(工学版), 2019, 49(4): 1026-1033. |
|
||