吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (9): 2902-2912.doi: 10.13229/j.cnki.jdxbgxb.20240141
• 车辆工程·机械工程 • 上一篇
基于双滑模面的变轨距列车悬挂系统控制方法
刘玉梅1( ),陈洪鹏1,庄娇娇2,陈熔1,王梦雨1
),陈洪鹏1,庄娇娇2,陈熔1,王梦雨1
- 1.吉林大学 交通学院,长春 130022
2.临沂大学 机械与车辆工程学院,山东 临沂 276000
Control method of suspension system of variable⁃gauge train based on double sliding surfaces approach
Yu-mei LIU1(),Hong-peng CHEN1,Jiao-jiao ZHUANG2,Rong CHEN1,Meng-yu WANG1
- 1.College of Transportation,Jilin University,Changchun 130022,China
2.School of Mechanical and Vehicle Engineering,Linyi University,Linyi 276000,China
摘要:
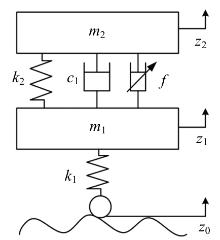
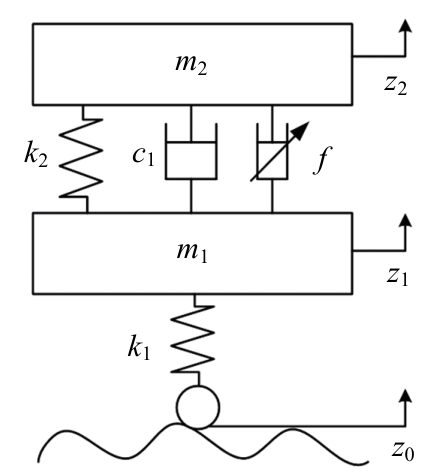
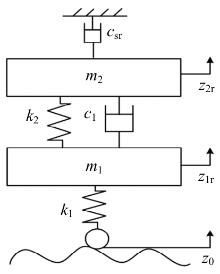
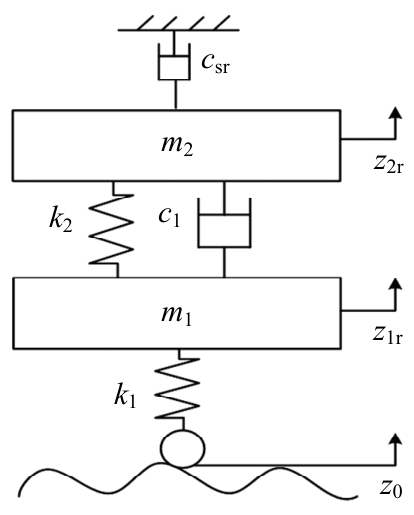
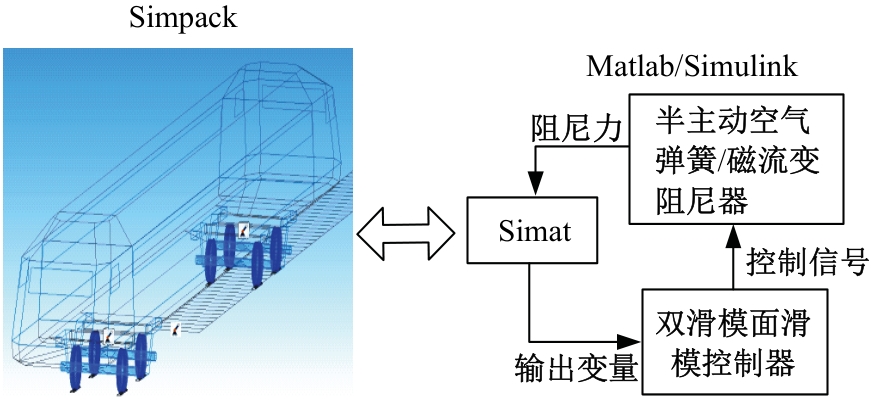
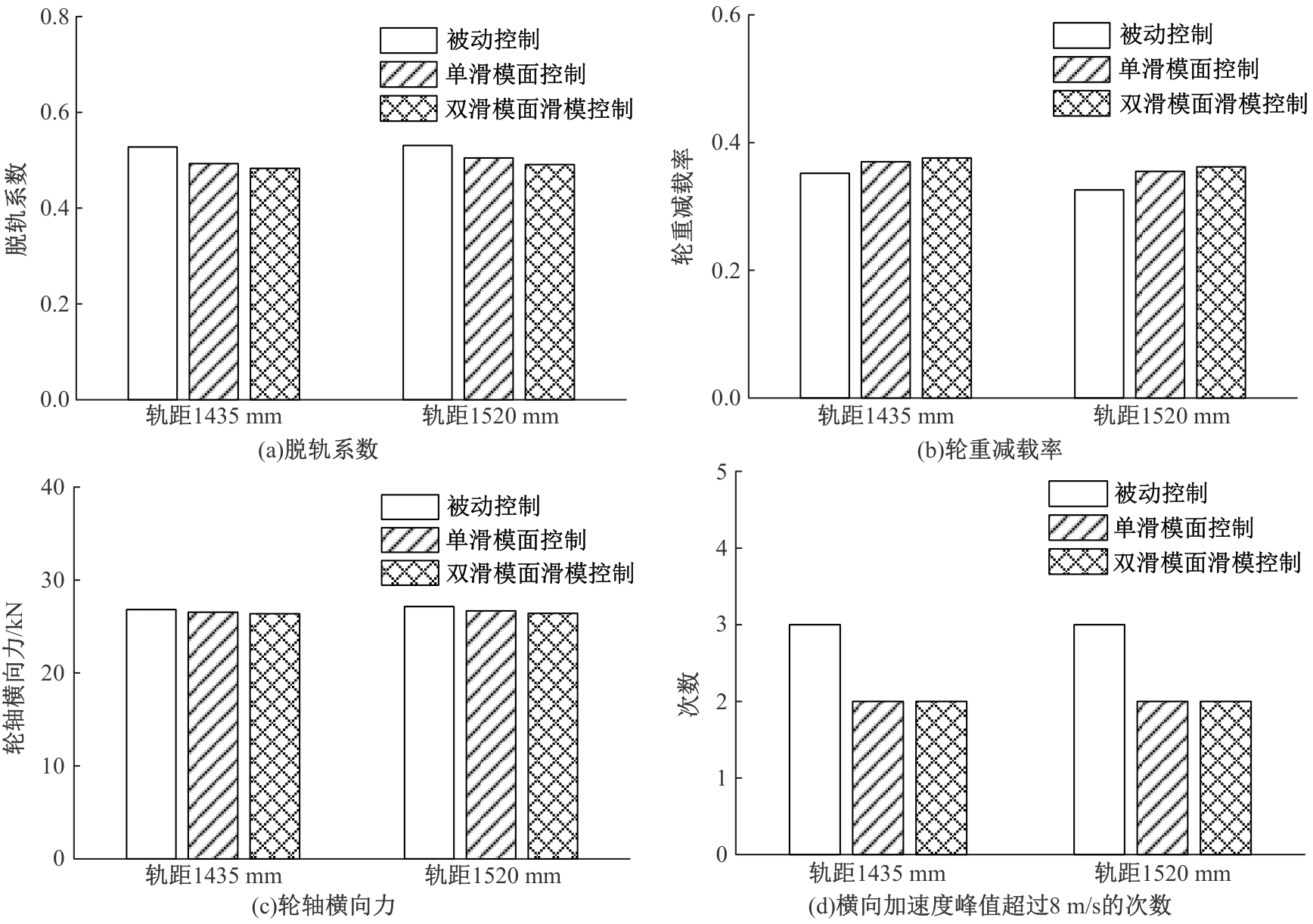
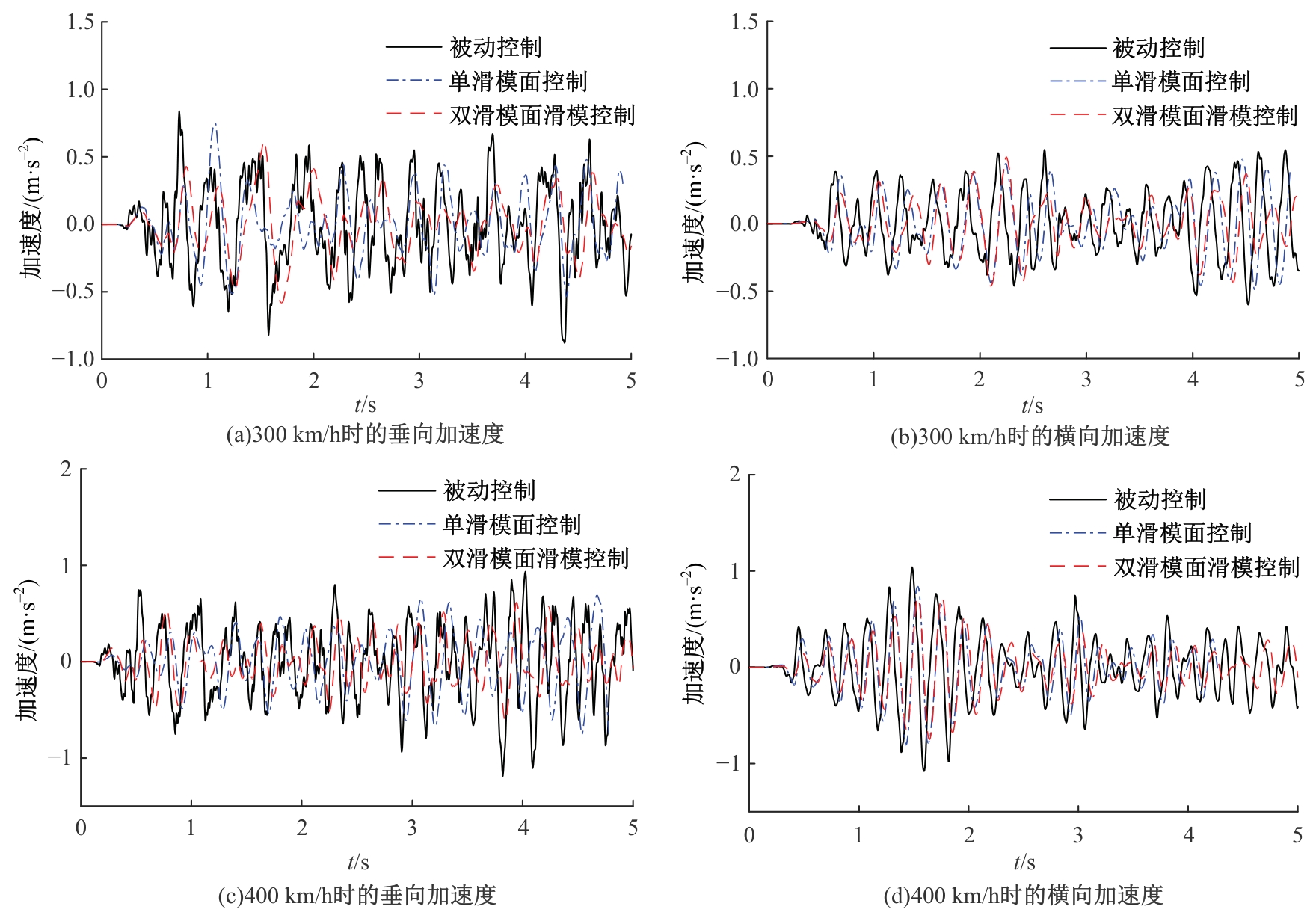
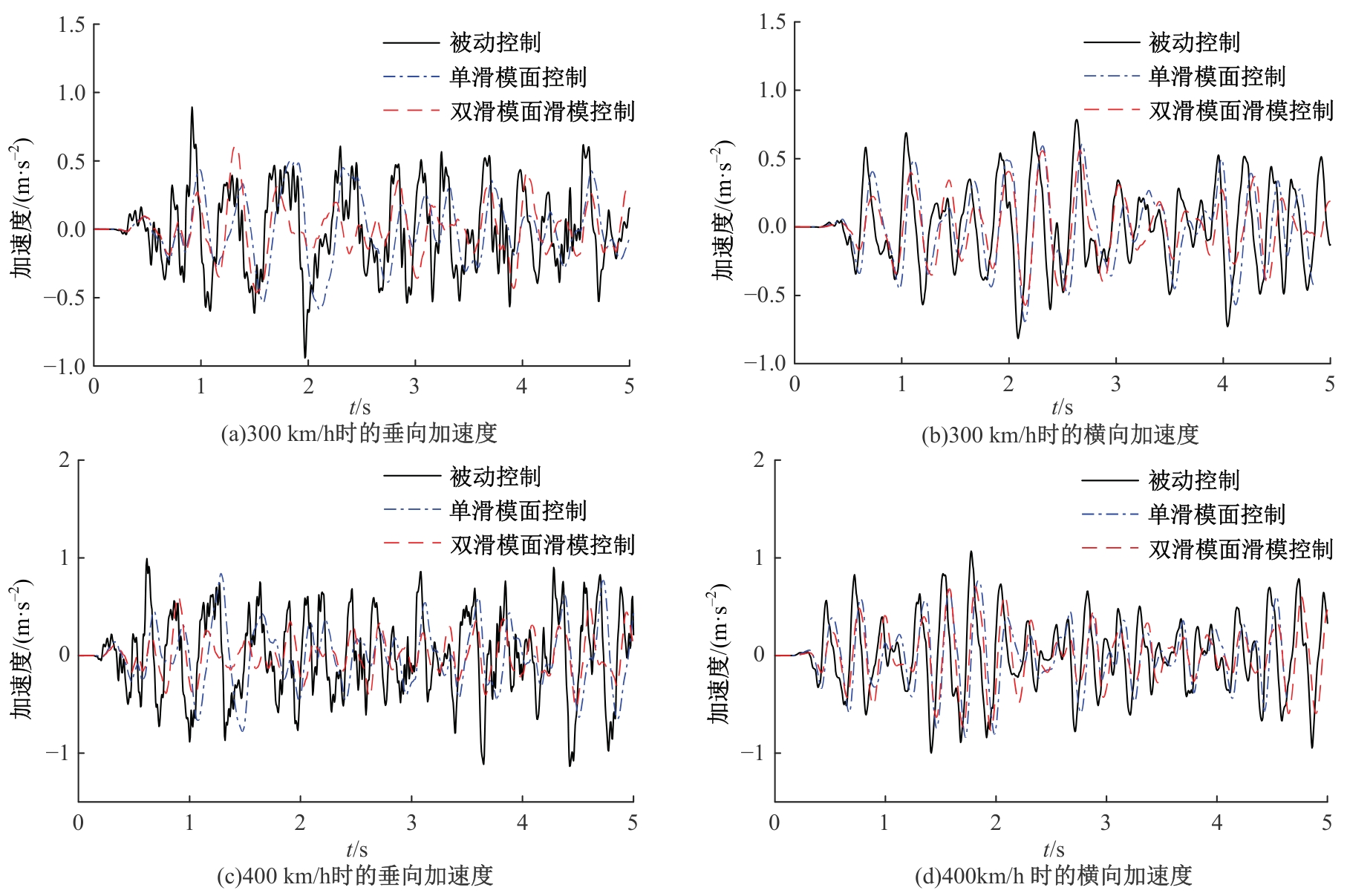
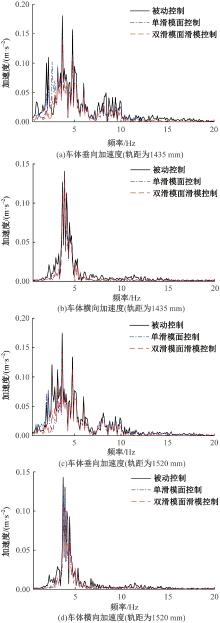
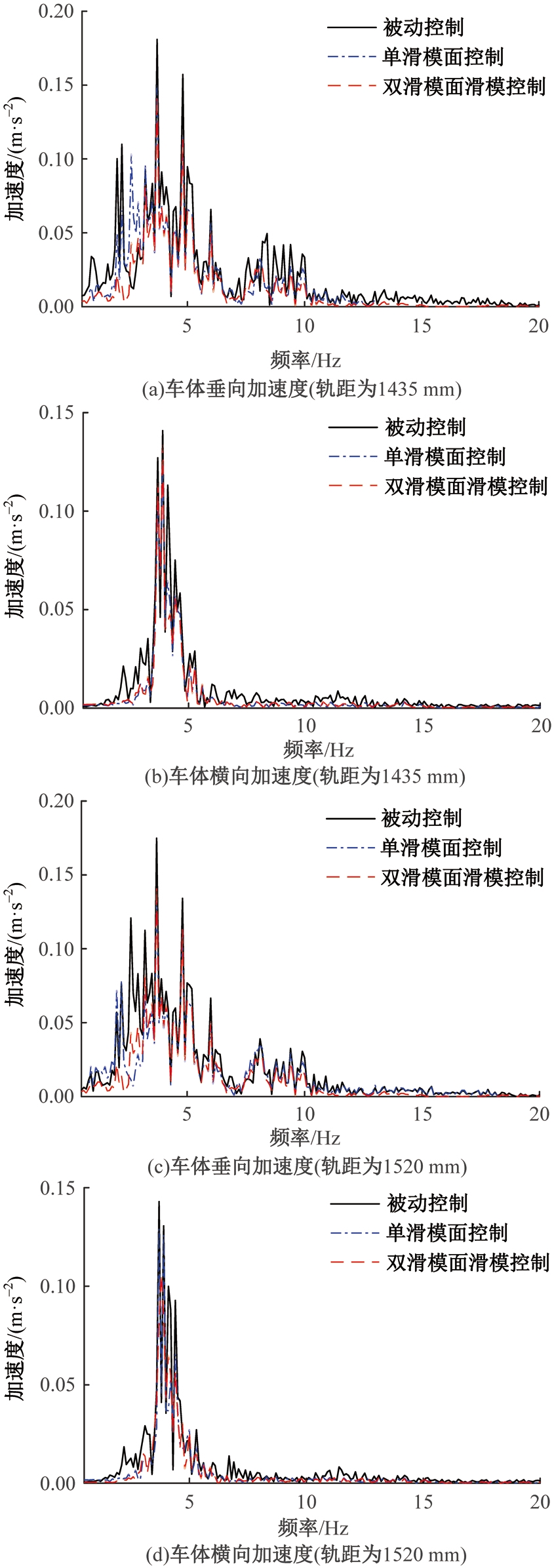
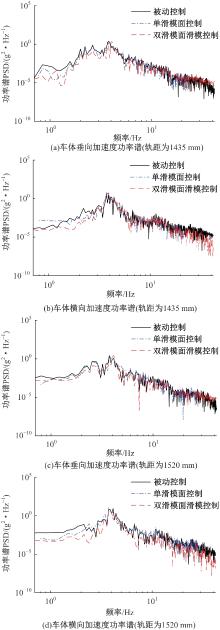
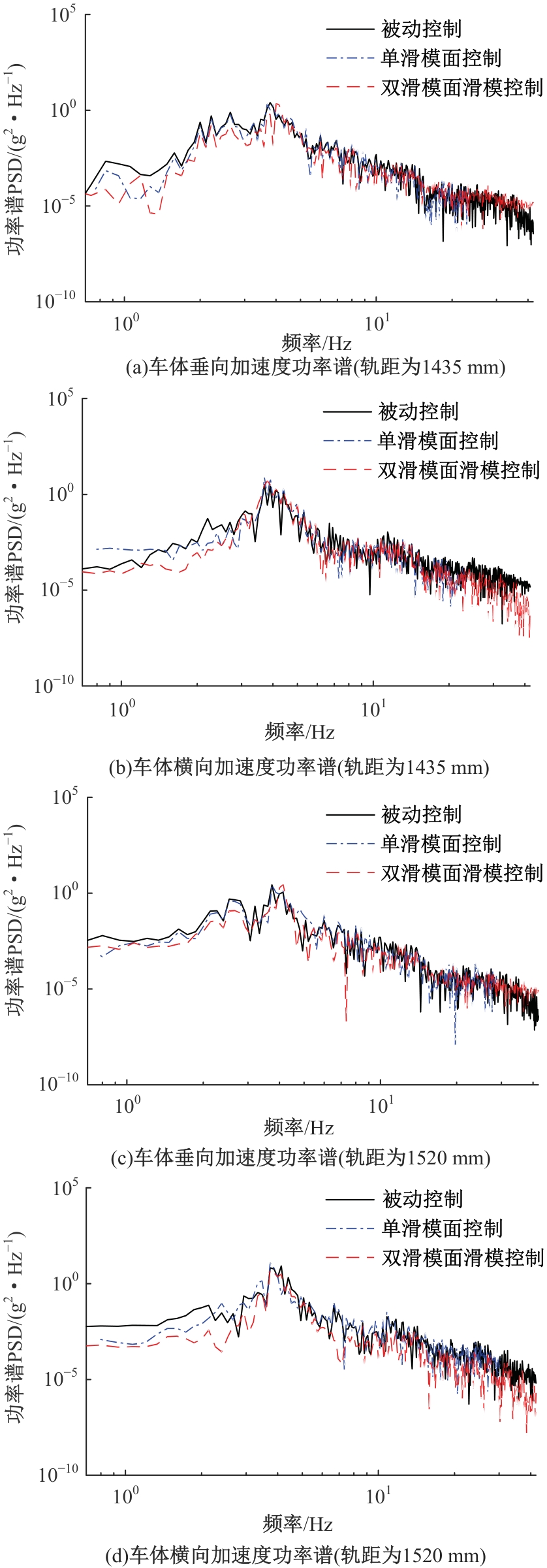
为了改善高速变轨距列车在不同轨距线路上的运行性能,采用基于双滑模面的滑模半主动控制方法,调节二系悬挂中空气弹簧和磁流变阻尼器的阻尼力。搭建1/4车分数阶天棚阻尼控制的滑模参考模型,设计双滑模面滑模控制器,将半主动控制方法应用于二系空气弹簧和横向磁流变阻尼器;构建变轨距列车悬挂系统半主动控制的整车联合仿真模型,分析1 435 mm/1 520 mm轨距下变轨距车辆对轨道不平顺激励的响应性能,验证整车半主动控制方法的有效性。
中图分类号:
- U260

| [1] | 秦欢欢, 秦胜, 吴云云. “一带一路”铁路国际联运市场发展对策分析[J]. 铁道货运, 2018, 36(12): 17-23. |
| Qin Huan-huan, Qin Sheng, Wu Yun-yun. A study on the strategies of lnternational railway lnter-modal transport market among thenations along the belt and road[J]. Railway Freight Transport, 2018, 36(12): 17-23. | |
| [2] | 李芾, 邵亚堂, 黄运华, 等. 国外变轨距列车及其转向架的发展与研究[J]. 机车电传动, 2018(3): 1-13, 22. |
| Li Fu, Shao Ya-tang, Huang Yun-hua, et al. Development and research of foreign gauge-changeable train and bogie[J]. Electric Drive for Locomotives, 2018(3): 1-13, 22. | |
| [3] | Gomez J, Aísa J. Talgo automatic gauge change system for freight wagons[J]. Proceedings of the I MECH E. Part F: Journal of Rail and Rapid Transit, 2001, 215(1): 13-24. |
| [4] | Christoph G, Christoph D, Jean-Marc F. Entwicklung eines spurwechselfä higen Laufdrehgestells (Typ EV09)[J].ZEVrail Glasers Annalen, 2011, 135(11): 130-139. |
| [5] | Yang S P, Zhao Y W, Liu Y Q, et al. A new semi-active control strategy on lateral suspension systems of high-speed trains and its application in HIL test rig[J]. Vehicle System Dynamics, 2023, 61(5): 1317-1344. |
| [6] | Nguyen S D, Nguyen H Q. Design of active suspension controller for train cars based on sliding mode control, uncertainty observer and neuro-fuzzy system[J].Journal of Vibration and Control, 2015, 23(8): 1334-1353. |
| [7] | 廖英英, 陈祖晨, 刘永强, 等. 高速列车悬挂系统连续混合控制策略的设计与仿真分析[J]. 振动与冲击, 2021, 40(6): 235-242. |
| Liao Ying-ying, Chen Zu-chen, Liu Yong-qiang, et al. Design and simulation analysis of a continuous mixed control for high-speedtrain suspension svstems[J]. Journal of Vibration and Shock, 2021, 40(6):235-242. | |
| [8] | 金天贺, 张志, 刘志明, 等. 高速列车H∞控制可变刚度悬挂系统应用研究[J]. 机械工程学报, 2022, 58(8): 204-214. |
| Jin Tian-he, Zhang Zhi, Liu Zhi-ming, et al. Application research on H∞ controlled variable stiffness suspension system of high-speed train[J]. Journal of Mechanical Engineering, 2022, 58(8): 204-214. | |
| [9] | 郭孔辉, 隋记魁, 郭耀华. 基于天棚和地棚混合阻尼的高速车辆横向减振器半主动控制[J]. 振动与冲击, 2013, 32(2): 18-23. |
| Guo Kong-hui, Sui Ji-kui, Guo Yao-Hua. Semi-active control method for a high-speed railway vehicle lateral damper basedon skyhook and groundhook hybrid damping[J]. Journal of Vibration and Shock, 2013, 32(2): 18-23. | |
| [10] | 韩飞, 吴限德, 段广仁, 等. 逼近与跟踪翻滚目标的双滑模面姿轨耦合控制[J]. 哈尔滨工程大学学报, 2018, 39(1): 23-32. |
| Han Fei, Wu Xian-de, Duan Guang-ren, et al. Attitude and orbit coupled dual sliding-mode surface control for approaching andtracking tumbling target[J]. Journal of Harbin Engineering University, 2018, 39(1): 23-32. | |
| [11] | 刘金琨. 滑模变结构控制MATLAB仿真基本理论与设计方法[M].3版.北京: 清华大学出版社, 2015. |
| [12] | 庄娇娇. 高速变轨距列车动力学性能优化及半主动控制策略研究[D]. 长春: 吉林大学交通学院, 2019. |
| Zhuang Jiao-jiao. Research on dynamic performance optimization and semi-active control strategy of high-speed variable-gauge train[D]. Changchun: College of Transportation,Jilin University, 2019. | |
| [13] | . 机车车辆动力学性能评定及试验鉴定规范 [S]. |
| [14] | . 机车车辆车轮轮缘踏面外形 [S]. |
| [15] | .钢轨 第1部分:43kg/m~75kg/m钢轨 [S]. |
| [16] | 翟婉明. 车辆-轨道耦合动力学(上)[M]. 4版. 北京:科学出版社, 2015. |
| [1] | 李文航,倪涛,赵丁选,邓英杰,师小波. 基于模型预测反馈技术的救援车辆液压悬挂系统控制方法[J]. 吉林大学学报(工学版), 2024, 54(3): 610-619. |
| [2] | 刘玉梅,盛佳香,庄娇娇,陈熔,赵大龙. 高速变轨距转向架结构优化及动力学性能分析与预测[J]. 吉林大学学报(工学版), 2024, 54(2): 453-460. |
| [3] | 刘玉梅,胡婷,庄娇娇,盛佳香,周殿买. 基于主成分分析赋权的变轨距列车悬挂参数优化[J]. 吉林大学学报(工学版), 2024, 54(11): 3158-3167. |
| [4] | 应沛然,曾小清,沈拓,袁腾飞,宋海峰,王奕曾. 基于冗余工序编码的高速列车节能驾驶智能算法[J]. 吉林大学学报(工学版), 2023, 53(12): 3404-3414. |
| [5] | 李文航,倪涛,赵丁选,张泮虹,师小波. 基于集合卡尔曼滤波的高机动救援车辆主动悬挂控制方法[J]. 吉林大学学报(工学版), 2022, 52(12): 2816-2826. |
| [6] | 刘玉梅,乔宁国,庄娇娇,刘鹏程,胡婷,陈立军. 基于多传感器数据融合的轨道车辆齿轮箱异常检测[J]. 吉林大学学报(工学版), 2019, 49(5): 1465-1470. |
| [7] | 赖晴鹰,刘军,赵若愚,骆泳吉,孟令云,徐亚之. 基于变间距动态规划的中高速磁悬浮列车 速度曲线优化[J]. 吉林大学学报(工学版), 2019, 49(3): 749-756. |
| [8] | 尹紫红, 朱波, 邵国霞, 孔德惠, 蒋良潍. 铁路超重货物作用下的轨道路基响应[J]. 吉林大学学报(工学版), 2017, 47(5): 1446-1452. |
| [9] | 左静, 帅斌, 黄文成. 改进距离熵权MULTIMOORA的铁路应急救援方案搜索[J]. 吉林大学学报(工学版), 2017, 47(4): 1068-1074. |
| [10] | 牛治慧, 苏建, 张益瑞, 徐观, 谭富星. 基于转向架试验台的轨道不平顺模拟试验[J]. 吉林大学学报(工学版), 2017, 47(2): 400-407. |
| [11] | 王启明, 苏建, 张兰, 陈秋雨, 徐观. 基于L-M算法的正交Stewart平台位姿正解的初值补偿[J]. 吉林大学学报(工学版), 2017, 47(1): 97-104. |
| [12] | 张益瑞, 苏建, 张兰, 谭富星, 徐观. 轨道车辆转向架一系悬挂刚度测定[J]. 吉林大学学报(工学版), 2016, 46(4): 1083-1089. |
| [13] | 刘玉梅, 赵聪聪, 熊明烨, 郭文翠, 张志远. 基于物元模型的高速轨道车辆传动系可靠性评价[J]. 吉林大学学报(工学版), 2015, 45(4): 1063-1068. |
| [14] | 石怀龙, 宋烨, 邬平波, 曾京, 朱海燕. 高速动车组转向架悬挂刚度特性[J]. 吉林大学学报(工学版), 2015, 45(3): 776-782. |
| [15] | 王秀刚, 苏建, 曹晓宁, 徐振, 卢海隔, 田宗举. 基于旋转矩阵正交性的转向架6自由度平台位姿正解解算[J]. 吉林大学学报(工学版), 2013, 43(05): 1241-1246. |
|
||