Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (9): 2508-2518.doi: 10.13229/j.cnki.jdxbgxb.20220106
Previous Articles Next Articles
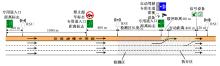
Merging guidance of exclusive lanes for connected and autonomous vehicles based on deep reinforcement learning
Jian ZHANG1,2,3( ),Qing-yang LI1,3,Dan LI2,Xia JIANG1,3,Yan-hong LEI2,Ya-ping JI1,3
),Qing-yang LI1,3,Dan LI2,Xia JIANG1,3,Yan-hong LEI2,Ya-ping JI1,3
- 1.Jiangsu Key Laboratory of Urban ITS,Southeast University,Nanjing 211189,China
2.Institute of Technology,Tibet University,Lhasa 850013,China
3.School of Transportation,Southeast University,Nanjing 211189,China
CLC Number:
- U491












| 1 | 秦严严, 王昊, 王炜. 智能网联环境下的混合交通流LWR模型[J]. 中国公路学报, 2018, 31(11): 147-156. |
| Qin Yan-yan, Wang Hao, Wang Wei. LWR model for mixed traffic flow in connected and autonomous vehicular environments[J]. China Journal of Highway and Transport, 2018, 31(11): 147-156. | |
| 2 | Becker F, Axhausen K W. Literature review on surveys investigating the acceptance of automated vehicles[J]. Transportation, 2017, 44(6): 1293-1306. |
| 3 | Elliott D, Keen W, Miao L. Recent advances in connected and automated vehicles[J]. Journal of Traffic and Transportation Engineering (English Edition), 2019, 6(2): 109-131. |
| 4 | 杜豫川, 刘成龙, 吴荻非, 等. 新一代智慧高速公路系统架构设计[J]. 中国公路学报, 2022, 35(4): 203-214. |
| Du Yu-chuan, Liu Cheng-long, Wu Di-fei, et al. Framework of the new generation of smart highway[J]. China Journal of Highway and Transport, 2022, 35(4): 203-214. | |
| 5 | Shladover S E. Connected and automated vehicle systems: introduction and overview[J]. Journal of Intelligent Transportation Systems, 2017, 22(3): 190-199. |
| 6 | 冉斌, 谭华春, 张健, 等. 智能网联交通技术发展现状及趋势[J]. 汽车安全与节能学报, 2018, 9(2): 119-130. |
| Ran Bin, Tan Hua-chun, Zhang Jian, et al. Development status and trend of connected automated vehicle highway system[J]. Journal of Automotive Safety and Energy, 2018, 9(2): 119-130. | |
| 7 | Ma K, Wang H. Influence of exclusive lanes for connected and autonomous vehicles on freeway traffic flow[J]. IEEE Access, 2019, 7: 50168-50178. |
| 8 | Hua X D, Yu W J, Wang W. Influence of lane policies on freeway traffic mixed with manual and connected and autonomous vehicles[J]. Journal of Advanced Transportation, 2020, 2020: No.3968625. |
| 9 | Ghiasi A, Hussain O, Qian Z. A mixed traffic capacity analysis and lane management model for connected automated vehicles: a markov chain method[J]. Transportation Research Part B, 2017, 106: 266-292. |
| 10 | Chen D J, Ahn S, Chitturi M. Towards vehicle automation: roadway capacity formulation for traffic mixed with regular and automated vehicles[J]. Transportation Research Part B, 2017, 100: 196-221. |
| 11 | Ye L, Yamamoto T. Impact of dedicated lanes for connected and autonomous vehicle on traffic flow throughput[J]. Physica A, 2018, 512: 588-597. |
| 12 | Ye L, Yamamoto T. Modeling connected and autonomous vehicles in heterogeneous traffic flow[J]. Physica A, 2018, 490: 269-277. |
| 13 | Masher D P, Ross D W, Wong P J, et al. Guidelines for design and operation of ramp control systems[R]. Menlo Park: CA United States: Stanford Research Institute,1975. |
| 14 | Smaragdis E, Papageogiou M. Series of new local ramp metering strategies[J]. Transportation Research Record, 2003, 1856: 74-86. |
| 15 | Bellemans T, Schutter B D, Moor B D. Model predictive control for ramp metering of motorway traffic: a case study[J]. Control Engineering Practice, 2006, 14(7): 757-767. |
| 16 | 陈德望, 王飞跃, 陈龙. 基于模糊神经网络的城市高速公路入口匝道控制算法[J]. 交通运输工程学报, 2003(2): 100-105. |
| Chen De-wang, Wang Fei-yue, Chen Long. Freeway ramp control algorithm based on neurofuzzy networks[J]. Journal of Traffic and Transportation Engineering, 2003(2): 100-105. | |
| 17 | 曾筠程, 邵敏华, 孙立军, 等. 基于有向图卷积神经网络的交通预测与拥堵管控[J]. 中国公路学报, 2021, 34(12): 239-248. |
| Zeng Yun-cheng, Shao Min-hua, Sun Li-jun, et al. Traffic prediction and congestion control based on directed graph convolution neural network[J]. China Journal of Highway and Transport, 2021, 34(12): 239-248. | |
| 18 | Zhang J, Jiang X, Liu Z, et al. A study on autonomous intersection management: planning-based strategy improved by convolutional neural network[J]. KSCE Journal of Civil Engineering, 2021, 25(10): 3995-4004. |
| 19 | Davarynejad M, Hegyi A, Vrancken J, et al. Motorway ramp-metering control with queuing consideration using Q-learning[C]∥2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 2011: 1652-1658. |
| 20 | 郑思. 面向快速道路远距离瓶颈的深度强化学习交通流控制策略研究[D]. 南京:东南大学交通学院, 2021. |
| Zheng Si. Research on deep reinforcement learning-based active traffic flow control strategies at distant downstream bottlenecks of expressway[D]. Nanjing: School of Transportation, Southeast University, 2021. | |
| 21 | Belletti F, Haziza D, Gomes G. Expert level control of ramp metering based on multi-task deep reinforcement learning[J]. Transactions on Intelligent Transportation Systems, 2017, 19(4): 1198-1207. |
| 22 | 葛家丽. 基于车辆簇的高速公路路侧单元部署研究[D]. 济南: 山东科技大学交通学院, 2020. |
| Ge Jia-li. Research on freeway road side unit deployment based on vehicle clusters[D]. Jinan: School of Transportation, Shandong University of Science and Technology, 2020. | |
| 23 | 陈瑜. 高速公路作业区安全分析及交通组织管理方法研究[D]. 哈尔滨: 哈尔滨工业大学交通科学与工程学院, 2006. |
| Chen Yu. The safety analysis and organization & management method study of freeway work zone[D]. Harbin: School of Transportation Science & Engineering, Harbin Institute of Technology, 2006. | |
| 24 | 石茂清. 道路交通安全设施设计研究[D]. 成都: 西南交通大学交通运输与物流学院, 2005. |
| Shi Mao-qing. Study on design of traffic safety facilities[D]. Chengdu: School of Transportation and Logistics, Southwest Jiaotong University, 2005. | |
| 25 | 孙玲, 张静, 周瀛, 等. 车路协同环境下自动驾驶专用车道入口区域设计[J]. 公路交通科技, 2020, 37(): 122-129. |
| Sun Ling, Zhang Jing, Zhou Ying, et al. Design of entrance area of automatic driving special lane in vehicle-infrastructure collaborative environment[J]. Journal of Highway and Transportation Research and Development, 2020, 37(Sup.1): 122-129. | |
| 26 | Milanés V, Shladover S E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data[J]. Transportation Research Part C: Emerging Technologies, 2014, 48: 285-300. |
| 27 | Xue Y, Wang X, Cen B L, et al. Study on fuel consumption in the Kerner-Klenov-Wolf three-phase cellular automaton traffic flow model[J]. Nonlinear Dynamics, 2020, 102(1): 1-10. |
| 28 | Wang C H, Hwang M C. Value-based deep reinforcement learning for adaptive isolated intersection signal control[J]. IET Intelligent Transport Systems, 2018, 12(9): 1005-1010. |
| 29 | Schaul T, Quan J, Antonoglou I, et al. Prioritized experience replay[C]∥Proceeding of the 4th International Conference on Learning Representations, San Juan, Puerto Rico, 2016: 322-355. |
| 30 | 武毅. 基于三相交通流理论的元胞自动机模型研究[D]. 长春: 吉林大学交通学院, 2018. |
| Wu Yi. Research on cellular automated traffic flow model for three-phase theory[D]. Changchun: College of Transportation, Jilin University, 2018. | |
| 31 | 舒凌洲, 吴佳, 王晨. 基于深度强化学习的城市交通信号控制算法[J]. 计算机应用, 2019, 39(5): 1495-1499. |
| Shu Ling-zhou, Wu Jia, Wang Chen. Urban traffic signal control based on deep reinforcement learning[J]. Journal of Computer Applications, 2019, 39(5): 1495-1499. |
| [1] | Yan-tao TIAN,Yan-shi JI,Huan CHANG,Bo XIE. Deep reinforcement learning augmented decision⁃making model for intelligent driving vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 682-692. |
| [2] | Wei-chao ZHUANG,Hao-nan Ding,Hao-xuan DONG,Guo-dong YIN,Xi WANG,Chao-bin ZHOU,Li-wei XU. Learning based eco⁃driving strategy of connected electric vehicle at signalized intersection [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(1): 82-93. |
| [3] | Yong LIU,Lei XU,Chu-han ZHANG. Deep reinforcement learning model for text games [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(3): 666-674. |
| [4] | Zhong-li WANG,Hao WANG,Yan SHEN,Bai-gen CAI. A driving decision⁃making approach based on multi⁃sensing and multi⁃constraints reward function [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(11): 2718-2727. |
| [5] | Dong-bo LIU,Li-xiao SHEN,Lei-lei DAI,Jian LU. Traffic signal control method at isolated intersections based on multi-target radar data [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(10): 2456-2465. |
| [6] | Ya-hui ZHAO,Fei-yang YANG,Zhen-guo ZHANG,Rong-yi CUI. Korean text structure discovery based on reinforcement learning and attention mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1387-1395. |
| [7] | Kai LU,Wei WU,Guan-rong LIN,Xin TIAN,Jian-min XU. Combination forecasting model for number of assembling passengers at transportation terminal based on KNN regression algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1241-1250. |
| [8] | Shuai LYU,Jing LIU. Stochastic local search heuristic method based on deep reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1420-1426. |
| [9] | Jian ZHANG,Kun-run WU,Min YANG,Bin RAN. Double⁃ring adaptive control model of intersection during intelligent and connected environment [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 541-548. |
| [10] | Yi-ming BIE,Kai JIANG,Ru-ru TANG,Lin-hong WANG,Xin-yu XIONG. Time of interval partition for traffic control at isolated intersection considering impacts of plan transition [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 1844-1851. |
| [11] | Shun YANG,Yuan⁃de JIANG,Jian WU,Hai⁃zhen LIU. Autonomous driving policy learning based on deep reinforcement learning and multi⁃type sensor data [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1026-1033. |
| [12] | CHEN Song, LI Xian-sheng, REN Yuan-yuan. Adaptive signal control method for intersection with hook-turn buses [J]. 吉林大学学报(工学版), 2018, 48(2): 423-429. |
| [13] | ZHAO Shu-zhi, LIANG Shi-dong, MA Ming-hui, LIU Hua-sheng, ZHU Yong-gang. Real-time queue length estimation at signalized intersection [J]. 吉林大学学报(工学版), 2016, 46(1): 85-91. |
| [14] | XU Hong-feng, ZHANG Kun, YAO Rong-han. Control strategy of full metering signalization at roundabout [J]. 吉林大学学报(工学版), 2016, 46(1): 76-84. |
| [15] | XU Hong-feng, GENG Xian-cai, HE Long. Signal timing plan for fully signalized four-leg roundabouts with single-approach-entering operation [J]. 吉林大学学报(工学版), 2014, 44(4): 953-962. |
|