Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (4): 1496-1505.doi: 10.13229/j.cnki.jdxbgxb20200334
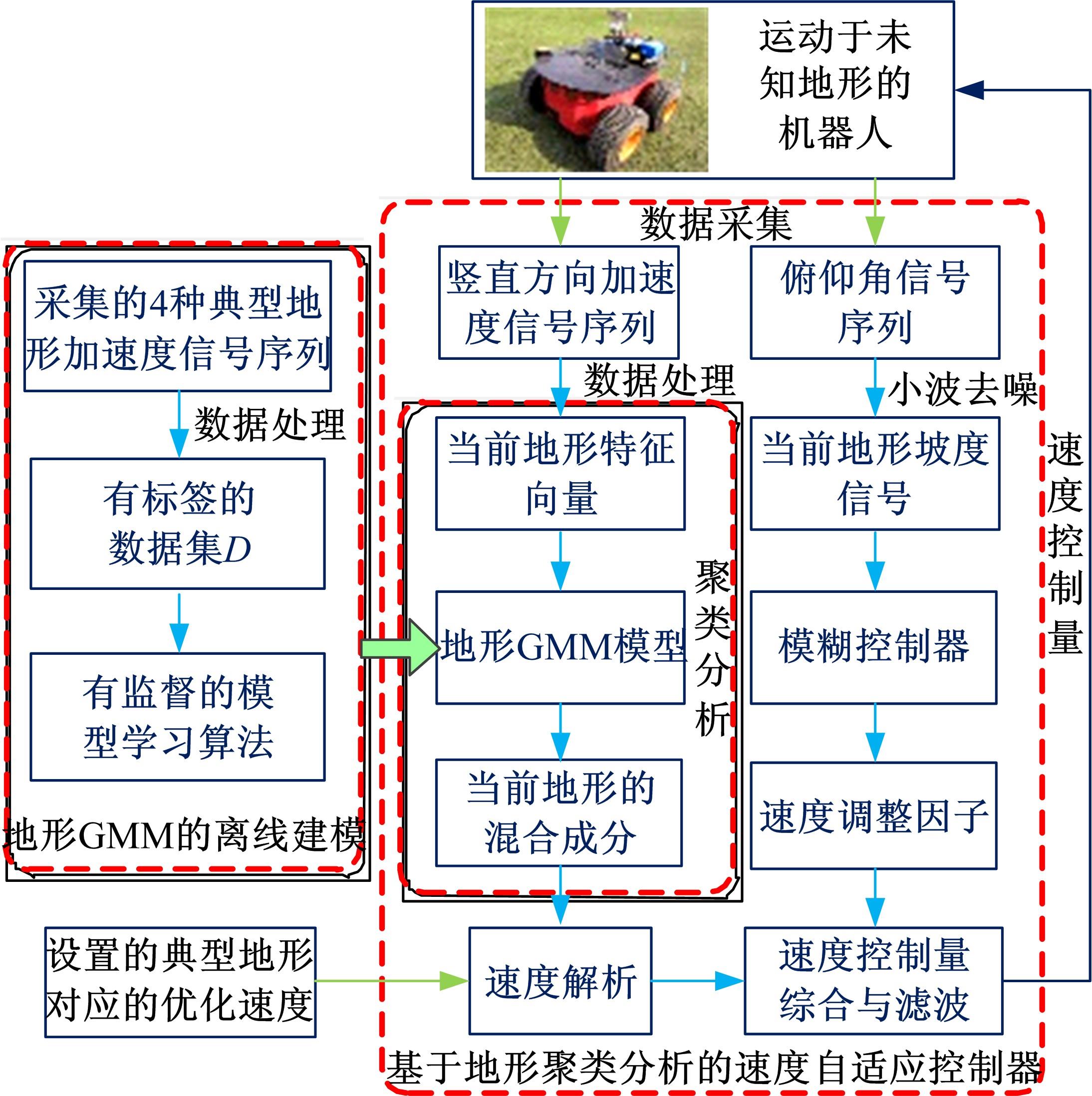
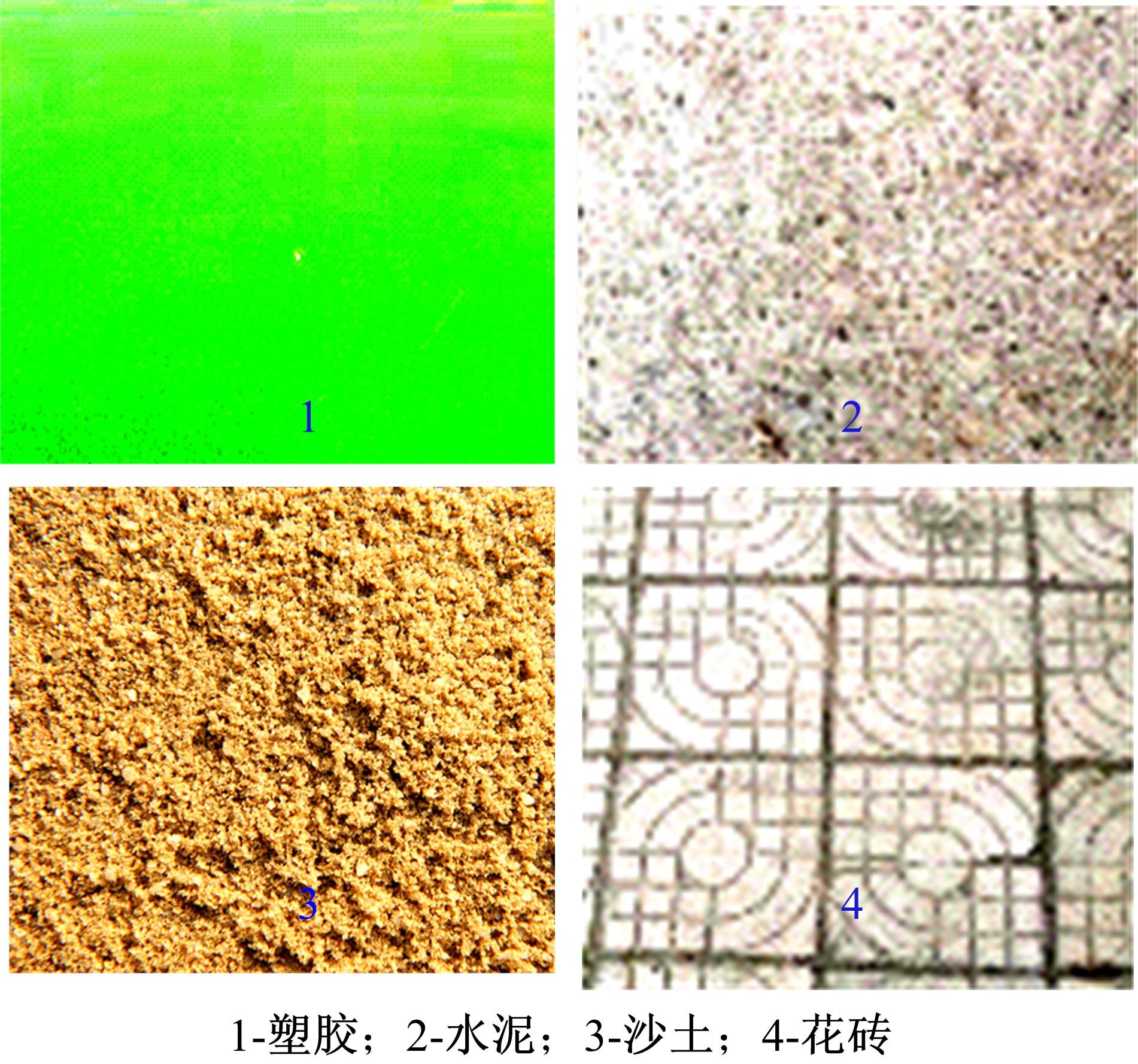
Speed adaptive control of mobile robot based on terrain clustering analysis
Ming LIU1,2( ),Xue-wen RONG1(),Yi-bin LI1,Shuai-shuai ZHANG2,Yan-fang YIN2,Jiu-hong RUAN3
),Xue-wen RONG1(),Yi-bin LI1,Shuai-shuai ZHANG2,Yan-fang YIN2,Jiu-hong RUAN3
- 1.College of Control Science and Engineering,Shandong University,Jinan 250061,China
2.College of Electrical Engineering and Automation,Shandong University of Science and Technology,Jinan 250031,China
3.School of Rail Transportation,Shandong Jiaotong University,Jinan 250351,China
CLC Number:
- TP242










| 1 | Matos-Carvalho J P, Fonseca J M, Mora A, et al. UAV downwash dynamic texture features for terrain classification on autonomous navigation[C]∥Proceedings of the Federated Conference on Computer Science and Information Systems,Poznan,Poland,2018: 1079-1083. |
| 2 | Chen Y, Zhang P F, Wang S F, et al. Image feature based machine learning approach for road terrain classification[C]∥Proceedings of IEEE International Conference on Mechatronics and Automation,Changchun, China, 2018: 2097-2102. |
| 3 | Vandapel N, Huber D F, Kapuria A, et al. Natural terrain classification using 3-D ladar data[C]∥IEEE International Conference on Robotics and Automation(ICRA), Piscataway, USA, 2004: 5117-5122. |
| 4 | Yan W Y, Shaker A, El-Ashmawy N. Urban land cover classification using airborne LiDAR data: a review [J]. Remote Sensing of Environment, 2015, 158: 295-310. |
| 5 | Libby J, Stentz A J. Using sound to classify vehicle-terrain interactions in outdoor environments[C]∥ Proceedings of the IEEE International Conference on Robotics and Automation, Piscataway, USA, 2012: 3559-3566. |
| 6 | Riopelle N, Caspers P, Sofge D. Terrain classification for autonomous vehicles using Bat-Inspired echolocation[C]∥ Proceedings of the International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 2018. |
| 7 | Iagnemma K, Dubowsky S. Terrain estimation for high-speed rough-terrain autonomous vehicle navigation[C]∥Proc of the International Society for Optical Engineering, Orlando, USA, 2002, 4715: 256-266. |
| 8 | Brooks C A, Iagnemma K. Vibration-based terrain classification for planetary exploration rovers[J]. IEEE Transactions on Robotics, 2005, 21(6): 1185-1190. |
| 9 | Brooks C A, Iagnemma K. Self-supervised terrain classification for planetary surface exploration rovers [J]. Journal of Field Robotics, 2012, 29(3): 445-468. |
| 10 | du Pont E M, Moore C A, Collins J E G, et al. Frequency response method for terrain classification in autonomous ground vehicles[J]. Autonomous Robots2008, 24(4): 337-347. |
| 11 | Jitpakdee R, Maneewarn T. Neural networks terrain classification using inertial measurement unit for an autonomous vehicle[C]∥Proceedings of International Conference on Instrumentation, Control and Information Technology, Tokyo, Japan, 2008: 554-558. |
| 12 | Weiss C, Fröhlich H, Zell A. Vibration-based terrain classification using support vector machines[C]∥ Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Piscataway, USA, 2006: 4429-4434. |
| 13 | Weiss C, Stark M, Zell A. SVMs for vibration-based terrain classification[C]∥Proceedings of the Autonome Mobile Systeme, Kaiserslautern, Germany, 2007: 1-7. |
| 14 | 魏健,张和明,田雷. 基于车轮力信号的地面类型分类算法研究[J].小型内燃机与车辆技术,2016,45(5): 40-47. |
| Wei Jian, Zhang He-ming, Tian Lei. Research of ground type classification algorithm based on wheel force signal [J]. Small Internal Combustion Engine and Vehicle Technique, 2016, 45(5):40-47. | |
| 15 | Weiss C, Tamimi H, Zell A. A combination of vision- and vibration-based terrain classification[C]∥Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Piscataway, USA, 2008: 2204-2209. |
| 16 | 李强, 薛开, 徐贺,等.基于振动采用支持向量机方法的移动机器人地形分类[J]. 机器人, 2012,34(6): 660-667. |
| Li Qiang, Xue Kai, Xu He, et al. Vibration-based terrain classification for mobile robots using support vector machine[J]. Robot, 2012, 34(6):660-667. | |
| 17 | Ojeda L, Borenstein J, Witus G, et al. Terrain characterization and classification with a mobile robot[J]. Journal of Field Robotics, 2006, 23(2): 103-122. |
| 18 | 周志华. 机器学习[M]. 北京:清华大学出版社,2016. |
| [1] | Shu-you YU,Huan CHANG,Ling-yu MENG,Yang GUO,Ting QU. Disturbance observer based moving horizon control for path following problems of wheeled mobile robots [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1097-1105. |
| [2] | Cai-hua ZHU,Xiao-li SUN,Yan LI. Forecast of urban public bicycle traffic demand by station classification [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 531-540. |
| [3] | Ai-guo WU,Jun-qing HAN,Na DONG. Adaptive sliding mode control based on ultra⁃local model for robotic manipulator [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1905-1912. |
| [4] | Wei WANG,Jian-ting ZHAO,Kuan-rong HU,Yong-cang GUO. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 464-471. |
| [5] | Fu LIU,Yi AN,Bo DONG,Yuan-chun LI. Decentralized energy guaranteed cost decentralized optimal control of reconfigurable robots based on ADP [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 342-350. |
| [6] | Xing-tian QU,Xue-xu WANG,Hui-chao SUN,Kun ZHANG,Long-wei YAN,Hong-yi WANG. Fuzzy self⁃adaptive PID control for fused deposition modeling 3D printer heating system [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 77-83. |
| [7] | Miao-miao MA,Jun-jun PAN,Xiang-jie LIU. Model predictive load frequency control of microgrid with electrical vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1644-1652. |
| [8] | Shu⁃you YU,Lei TAN,Wu⁃yang WANG,Hong CHEN. Control of active four wheel steering vehicle based ontriple⁃step method [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 934-942. |
| [9] | Hai⁃ying WEN,Xiang REN,Wei⁃liang XU,Ming CONG,Wen⁃long QIN,Shu⁃hai HU. Bionic design and experimental test of temporomandibular joint for masticatory robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 943-952. |
| [10] | GU Wan-li,WANG Ping,HU Yun-feng,CAI Shuo,CHEN Hong. Nonlinear controller design of wheeled mobile robot with H∞ performance [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1811-1819. |
| [11] | LI Zhan-dong,TAO Jian-guo,LUO Yang,SUN Hao,DING Liang,DENG Zong-quan. Design of thrust attachment underwater robot system in nuclear power station pool [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1820-1826. |
| [12] | WANG De-jun, WEI Wei-li, BAO Ya-xin. Actuator fault diagnosis of ESC system considering crosswind interference [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1548-1555. |
| [13] | YAN Dong-mei, ZHONG Hui, REN Li-li, WANG Ruo-lin, LI Hong-mei. Stability analysis of linear systems with interval time-varying delay [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1556-1562. |
| [14] | DONG Hui-juan, YU Zhen, FAN Ji-zhuang. Identification of non-axisymmetric ultrasonic standing wave field using laser Doppler vibrometer [J]. 吉林大学学报(工学版), 2018, 48(4): 1191-1198. |
| [15] | ZHANG Shi-tao, ZHANG Bao, LI Xian-tao, WANG Zheng-xi, TIAN Da-peng. Enhancing performance of FSM based on zero phase error tracking control [J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
|
||