Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (12): 3793-3803.doi: 10.13229/j.cnki.jdxbgxb.20240800
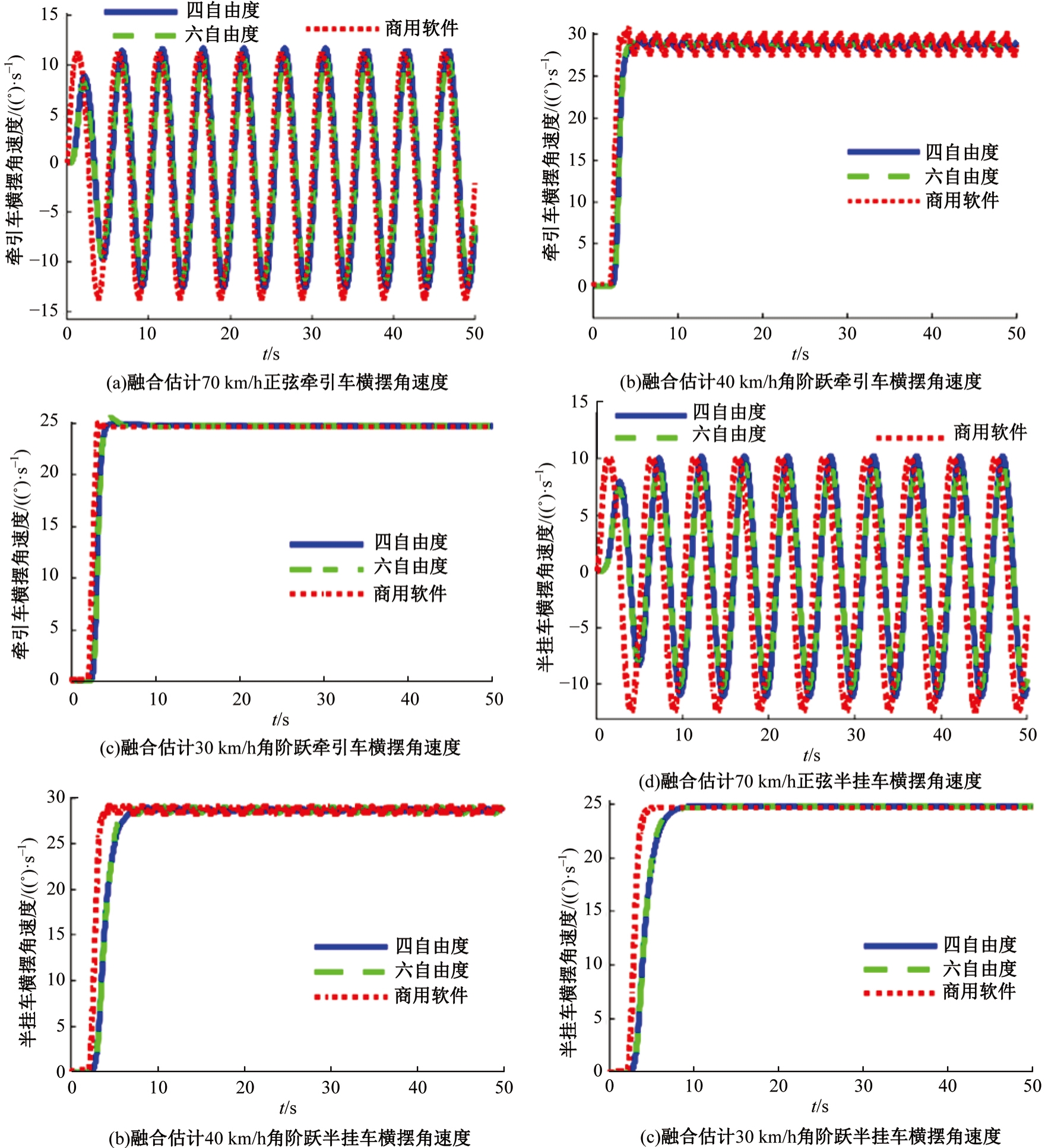
Semi⁃trailer stability parameter estimation based on genetic algorithm and recursive least squares method
Xiao-hua ZENG1( ),Kai-xuan LI1,Kai HAN2,Ming-yao GONG3(),Yu-feng HUANG1
),Kai-xuan LI1,Kai HAN2,Ming-yao GONG3(),Yu-feng HUANG1
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.The State Key Laboratory of Engine and Powertrain System,Weichai Power Co. ,Ltd. ,Weifang,262123,China
3.School of Aeronautical Engineering,Jilin University of Chemical Technology,Jilin 132102,China
CLC Number:
- U461.6





| [1] | 李一兵, 孙岳霆, 徐成亮, 等. 基于交通事故数据的汽车安全技术发展趋势分析[J]. 汽车安全与节能学报, 2016, 7(3): 241-253. |
| Li Yi-bing, Sun Yue-ting, Xu Cheng-liang, et al. Analysis of the development trend of automobile safety technology based on traffic accident data[J].Journal of Automotive Safety and Energy Conservation, 2016, 7(3): 241-253. | |
| [2] | 刘饯. 基于参数辨识的半挂汽车列车稳定性控制策略研究[D]. 武汉: 华中科技大学机械工程学院, 2021. |
| Liu Jian. Study on stability control strategy of semi-trailer based on parameter identification[D].Wuhan: School of Mechanical Engineering, Huazhong University of Science and Technology, 2021. | |
| [3] | Bolhasani M R, Goldberg T. Genetic Algorithms in Search, Optimization and Machine Learning[M].Reading,Ma: Addison-Wesley, 1989. |
| [4] | Bolhasani M R, Azadi S. Parameter estimation of vehicle handling model using genetic algorithm[J]. Scientia Iranica, 2002, 11(12): 121-127. |
| [5] | Baffet G, Charara A, Lechner D. Experimental evaluation of observers for tire-road forces, sideslip angle and wheel cornering stiffness[J]. Vehicle System Dynamics, 2008, 46(6): 501-520. |
| [6] | 宗长富, 聂枝根, 张振. 厢式半挂车简化模型参数辨识研究[J]. 中国公路学报, 2014, 27(4): 112-120. |
| Zong Chang-fu, Nie Zhi-gen, Zhang Zhen. Parameters identification for simplified modle of container semi-trailer[J].China Journal of Highway and Transport, 2014, 27(4): 112-120. | |
| [7] | 王杰. 基于扩展卡尔曼滤波的车辆参数辨识[J]. 现代机械, 2019, 1(3): 4-9. |
| Wang Jie. Vehicle parameter identification based on EKF[J]. Modern Machinery, 2019, 1(3): 4-9. | |
| [8] | 易鑫, 陈勇. 扩展卡尔曼滤波与遗传算法结合的车辆状态估计[J]. 重庆理工大学学报, 2022, 36 (12): 1-8. |
| Yi Xin, Chen Yong. Extended vehicle state estimation based on the combination of Kalman filter and genetic algorithm[J]. Journal of Chongqing University of Technology, 2022, 36(12): 1-8. | |
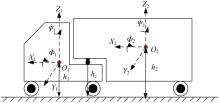
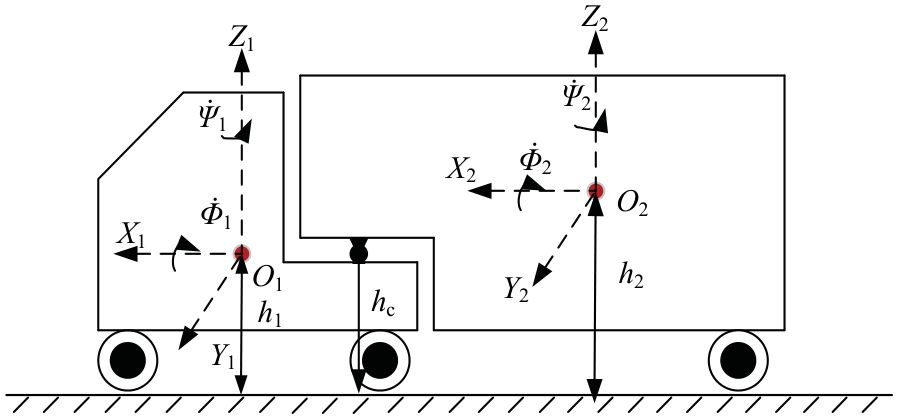
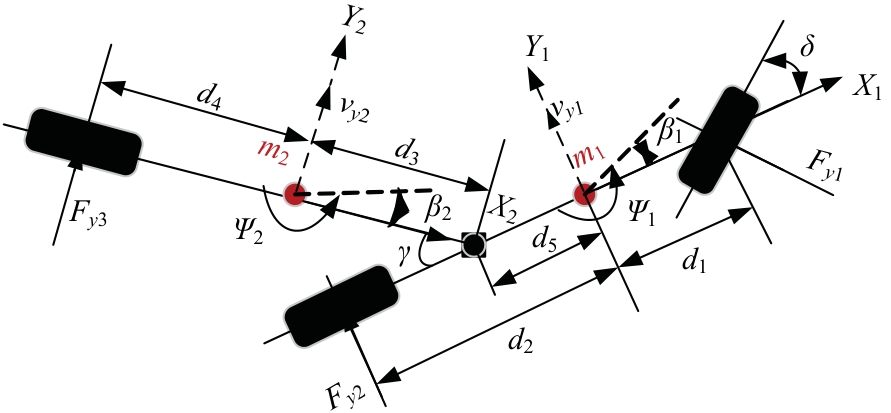
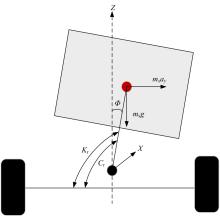
| [9] | 李洪雪, 李世武, 孙文财, 等. 考虑垂向-侧向运动的半挂列车动力学建模及分析[J]. 吉林大学学报: 工学版, 2021, 51(5): 49-56. |
| Li Hong-xue, Li Shi-wu, Sun Wen-cai,et al. A semi-trailer train that considers vertical⁃lateral movement dynamic modeling and analysis[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(5): 49-56. | |
| [10] | 梁群彰. 基于参数辨识的半挂汽车列车侧翻控制系统的研究[D]. 南宁: 广西大学交通运输学院, 2016. |
| Liang Qun-zhang. Research on rollover control system of semi-trailer train based on parameter identification[D].Nanning: School of Transportation, Guangxi University, 2016. | |
| [11] | 叶明, 卢祥伟, 张利杰, 等. 双遗忘因子最小二乘法车辆质量和时变坡度估计[J]. 重庆理工大学学报, 2023, 37(6): 1-9. |
| Ye Ming, Lu Xiang-wei, Zhang Li-jie, et al. Double forgetting factor, least squares vehicle mass and time-varying slope estimation[J]. Journal of Chongqing University of Technology, 2023, 37(6): 1-9. | |
| [12] | Miege A, Cebon D. Active roll control of an experimental articulated vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering. 2005, 219(6): 791-806 |
| [1] | Wei LAN,Zheng ZHOU,Guan-yu WANG,Wei WANG,Miao-miao ZHANG. Intelligent fitting method for vehicle design based on machine learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(9): 2858-2863. |
| [2] | Bing ZHU,Peng-xiang MENG,Bin LIU,Jia-yi HAN,Jian ZHAO,Zhi-cheng CHEN,Dong-jian SONG,Xiao-wen TAO. Virtual lane lines fitting method based on traffic environment information [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(9): 2935-2945. |
| [3] | Shou-tao LI,Xiang-yi JIA,Jun ZHU,Hong-yan GUO,Ding-li YU. Uncontrolled intersections decision⁃making method for intelligent driving vehicles based on Level⁃K [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(9): 3069-3078. |
| [4] | Gui-shen YU,Xin CHEN,Yue TANG,Chun-hui ZHAO,Ai-jia NIU,Hui CHAI,Jing-xin NA. Effect of laser surface treatment on the shear strength of aluminum-aluminum bonding joints [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2555-2569. |
| [5] | Jun-wu ZHAO,Ting QU,Yun-feng HU. Trajectory planning for intelligent vehicles based on adaptive sampling [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2802-2816. |
| [6] | Jin-wu GAO,Shao-long SUN,Shun-yao WANG,Bing-zhao GAO. Speed fluctuation suppression strategy of range extender based on motor torque compensation [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2475-2486. |
| [7] | Qiong-xin LIU,Tian-tian WANG,Ya-nan WANG. Non-dominated sorted particle swarm genetic algorithm to solve vehicle location routing problems [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(7): 2464-2474. |
| [8] | Xue-wei SONG,Ze-ping YU,Yang XIAO,De-ping WANG,Quan YUAN,Xin-zhuo LI,Jia-wen ZHENG. Research progress on the performance changes of lithium⁃ion batteries after aging [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(6): 1817-1833. |
| [9] | Mei-xia JIA,Jian-jun HU,Feng XIAO. Multi⁃physics simulation method of vehicle motor under varying working conditions based on multi⁃software combination [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(6): 1862-1872. |
| [10] | Chun XIAO,Zi-chun YI,Bing-yin ZHOU,Shao-rui ZHANG. Fuzzy energy management strategy of fuel cell electric vehicle based on improved pigeon⁃inspired optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(6): 1873-1882. |
| [11] | Wei-dong LI,Cao-yuan MA,Hao SHI,Heng CAO. An automatic driving decision control algorithm based on hierarchical reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1798-1805. |
| [12] | Dang LU,Yan-ru SUO,Yu-hang SUN,Hai-dong WU. Estimation of tire camber and sideslip combined mechanical characteristics based on dimensionless expression [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1516-1524. |
| [13] | Zhen-hai GAO,Cheng-yuan ZHENG,Rui ZHAO. Review of active safety verification and validation for autonomous vehicles in real and virtual scenarios [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1142-1162. |
| [14] | Tao ZHANG,Huang-da LIN,Zhong-jun YU. Real-time rolling optimization control method for gearshift of hybrid electric vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1215-1224. |
| [15] | Hao YUE,Xiao CHANG,Jian-ye LIU,Qiu-shi QU. Customized bus route optimization with vehicle window [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(4): 1266-1274. |
|
||