Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (2): 442-449.doi: 10.13229/j.cnki.jdxbgxb20191061
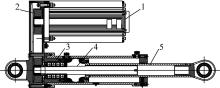
Stiffness modeling and feedforward control of servo electric cylinder drive system
Fu-gang ZHAI1,2,3( ),Yan-bin YIN1,3,Chao LI1,3,Wei TIAN1,3,Zi-shi QIAO1,3
),Yan-bin YIN1,3,Chao LI1,3,Wei TIAN1,3,Zi-shi QIAO1,3
- 1.School of Mechanical Engineering,Yanshan University,Qinhuangdao 066004,China
2.Institute of Mechanical Engineering,Nanjing Institute of Technology,Nanjing 211167,China
3.Hebei Innovation Center for Equipment Lightweight Design and Manufacturing,Qinhuangdao 066004,China
CLC Number:
- TH39











| 1 | 莫会成, 闵琳, 王健,等. 现代高性能永磁交流伺服系统综述(上)——永磁电机篇[J]. 伺服控制, 2014(2): 16-19. |
| Mo Hui-cheng, Min Lin, Wang Jian, et al. Overview of modern high-performance ac permanent magnet servo system (part I)——permanent magnet motor[J]. Journal of Servo Control, 2014(2): 16-19. | |
| 2 | 王帅夫, 刘景林. 基于大脑情感学习模型的步进电机控制系统[J]. 吉林大学学报: 工学版, 2014, 44(3): 765-770. |
| Wang Shuai-fu, Liu Jing-lin. Stepping motor control system based on brain emotional learning model[J]. Journal of Jilin University (Engineering and Technology Edition), 2014, 44(3): 765-770. | |
| 3 | 赵健, 邓志辉, 朱冰, 等. 面向电子机械助力制动的永磁同步电机位置伺服控制[J]. 吉林大学学报: 工学版, 2020, 50(3): 834-841. |
| Zhao Jian, Deng Zhi-hui, Zhu Bing, et al. Position servo control of permanent magnet synchronous motor for electro-mechanical brake booster[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(3): 834-841. | |
| 4 | Furukawa K, Takagi S. Electric cylinder and electric cylinder system: United States, 14/110870[P]. 2017-04-04.. |
| 5 | 夏占, 白韬光, 袁航. 行星滚柱丝杠90 kN电动缸整机模态与轴向静刚度分析[J]. 船舶工程, 2019, 41(3): 82-86. |
| Xia Zhan, Bai Tao-guang, Yuan Hang. Modal and axial static stiffness analysis of the planetary roller screw 90 kN electric cylinder[J]. Journal of Ship Engineering, 2019, 41(3): 82-86. | |
| 6 | 彭富霞, 吴运新, 龚海, 等. 中子衍射谱仪用二级电动缸的传动刚度特性分析[J]. 机械传动, 2015, 39(12): 111-115. |
| Peng Fu-xia, Wu Yun-xin, Gong Hai, et al. Drive rigidity characteristic analysis of telescopic electric cylinder used in neutron spectrometer[J],. Journal of Mechanical Transmission, 2015, 39(12): 111-115. | |
| 7 | 邓飙, 张潇, 郭君斌, 等. 双电动缸起竖设备同步控制策略仿真研究[J]. 机床与液压, 2016, 44(9): 123-128. |
| Deng Biao, Zhang Xiao, Guo Jun-bin, et al. Simulation on synchronization control strategy of erecting equipment with twin electric cylinders[J]. Journal of Machine Tool&Hydraulics, 2016, 44(9): 123-128. | |
| 8 | 冯虎田. 滚珠丝杠副动力学与设计基础[M].北京: 机械工业出版社, 2014. |
| 9 | 罗继伟, 罗天宇. 滚动轴承分析计算与应用[M]. 北京: 机械工业出版社, 2009. |
| 10 | 胡小英. 基于前馈和遗传算法的永磁同步电机伺服系统自抗扰研究[D]. 浙江: 浙江工业大学机械工程学院, 2018. |
| Hu Xiao-ying. Active disturbance rejection control of servo system of PMSM based on feedforward compensation and genetic algorithm[D]. Zhejiang: College of Mechanical Engineering, Zhejiang University of Technology, 2018. | |
| 11 | Huang H, Zheng X T, Li W P. Design and feedforward control of large-rotation two-axis scan mirror assembly with MEMS sensor integration[J]. Chinese Journal of Aeronautics, 2019, 32(8): 1912-1922. |
| [1] | Qing-wu ZHAO,Yong CHENG,Xue YANG,Ning WANG. A high⁃frequency nanosecond⁃pulsed ignition system for plasma assisted ignition and combustion [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 414-421. |
| [2] | Cheng YANG,Yong⁃sheng ZHAO,Zhi⁃feng LIU,Li⁃gang CAI. Stiffness model of bolted joint based on multi⁃scale theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1212-1220. |
| [3] | JIA Tuo,ZHAO Ding-xuan,CUI Yu-xin. Method of rollover pre-warning for articulated loader [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1762-1769. |
| [4] | ZANG Peng-fei, WANG Zhe, SUN Chen-le, LIN Lian-lian. Scavenging process for stable operation of linear range-extende [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1455-1465. |
| [5] | LI Yin-wu, WU Qing-wen, CHANG Zhi-yong, YANG Cheng. Simulation and optimal design of backhoe hydraulic excavator based on bionic teeth [J]. 吉林大学学报(工学版), 2018, 48(3): 821-827. |
| [6] | LIU Han-guang, WANG Guo-qiang, MENG Dong-ge, ZHAO Huan-yu. Reasonable pre-tension research of crawler traveling gear of hydraulic excavator [J]. 吉林大学学报(工学版), 2018, 48(2): 486-491. |
| [7] | ZHA Shan-shan, GUO Yu, HUANG Shao-hua, FANG Wei-guang. Dynamic facility layout for workshop under uncertain product demands [J]. 吉林大学学报(工学版), 2017, 47(6): 1811-1821. |
| [8] | YAN Yong-yao, LIU Wei, FU Jin-jiang. Compensation for adjustment error in high positioning accuracy turntable measuring system [J]. 吉林大学学报(工学版), 2017, 47(3): 855-860. |
| [9] | TANG Zhi-gang, ZHANG Li, SHANG Hui-chao, LYU Xiao-hui, CHEN Xi, ZHENG Ren-wei. Combustion characteristics in glow-plug ignition miniature ICE and influence of residual gas [J]. 吉林大学学报(工学版), 2017, 47(3): 811-818. |
| [10] | PENG Wei, LI Guo-xiang, YAN Wei. Improvement in wall functions for engine radiators [J]. 吉林大学学报(工学版), 2017, 47(3): 804-810. |
| [11] | HAN Lin-pei, HONG Wei, SU Yan, XIE Fang-xi, CHEN Jing, DU Wen-chang. Effect of GDI engine exhaust valve secondary open on refluent EGR stratification and combustion characteristics [J]. 吉林大学学报(工学版), 2017, 47(1): 113-121. |
| [12] | FU Jia-hong, YU Xiao-li, YAO Ling-yu, LIU Zhen-tao, HUANG Yu-qi. Numerical comparison of flow and heat transfer in detached cooling module for construction machinery [J]. 吉林大学学报(工学版), 2016, 46(2): 451-456. |
| [13] | QIU Qing-ying, WEI Zhen-kai, GAO Yu, FENG Pei-en, YIN Peng-long. Fatigue analysis method of working devices of hydraulic excavator [J]. 吉林大学学报(工学版), 2016, 46(1): 159-165. |
| [14] | TIAN Jing, LIU Zhong-chang, ZHANG Wen-jie, ZHANG Long-ping. Effect of load conditions on the performance of diesel engine under transient operation condition [J]. 吉林大学学报(工学版), 2015, 45(6): 1798-1803. |
| [15] | LUO Hai-tao, ZHOU Wei-jia, WANG Hong-guang, WU Jia-feng. Mechanical analysis of friction stir welding robot under typical working conditions [J]. 吉林大学学报(工学版), 2015, 45(3): 884-891. |
|
||