Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (3): 902-912.doi: 10.13229/j.cnki.jdxbgxb20221200
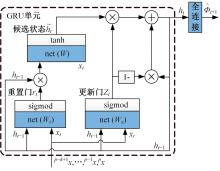
Static gait planning method for quadruped robot based on gate recurrent neural network
Shuai-shuai ZHANG( ),Yan-fang YIN,Lin-jing XIAO,Shuai JIANG()
),Yan-fang YIN,Lin-jing XIAO,Shuai JIANG()
- Department of Electrical and Information,Shandong University of Science and Technology,Jinan 250031,China
CLC Number:
- TP242










| 1 | 付博. 四足机器人动态稳定性分析及运动控制研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2010. |
| Fu Bo. Research on the analysis of quadruped robot dynamic stability and control[D]. Harbin: School of Mechatronics Engineering, Harbin Institute of Technology, 2010. | |
| 2 | McGhee R B, Frank A A. On the stability properties of quadruped creeping gaits[J]. Mathematical Biosciences, 1968, 3: 331-351. |
| 3 | Hwang H, Youm Y. Steady crawl gait generation algorithm for quadruped robots[J]. Advanced Robotics, 2008, 22(13/14):1539-1558. |
| 4 | Santos C P, Matos V. CPG modulation for navigation and omnidirectional quadruped locomotion[J]. Robotics and Autonomous Systems, 2012, 60(6): 912-927. |
| 5 | Loc V G, Koo I M, Tran D T, et al. Improving travers ability of quadruped walking robots using body movement in 3D rough terrains[J]. Robotics and Autonomous Systems, 2011, 59(12): 1036-1048. |
| 6 | 郝仁剑, 王军政, 史大威, 等. 基于速度矢量的四足机器人间歇步态规划方法[J]. 机器人, 2016, 38(5):540-549. |
| Hao Ren-jian, Wang Jun-zheng, Shi Da-wei, et al. Intermittent gait planning method of quadruped robot based on velocity vector[J].Robot,2016,38(5):540-549. | |
| 7 | 孟健, 李贻斌, 柴汇, 等. 连续不规则台阶环境四足机器人步态规划与控制[J]. 机器人, 2015, 37(1): 85-93. |
| Meng Jian, Li Yi-bin, Chai Hui, et al. Gait planning and control of quadruped robots in continuous irregular steps environment[J]. Robot, 2015, 37(1):85-93. | |
| 8 | 黄博,赵建文,孙立宁.基于静平衡的四足机器人直行与楼梯爬越步态[J]. 机器人, 2010, 32(2): 226-232. |
| Huang Bo, Zhao Jian-wen, Sun Li-ning. Straight walking and stair climbing gait of quadruped robot based on static balance[J]. Robot, 2010, 32 (2): 226-232. | |
| 9 | 冯华山, 王润孝, 赵国斌, 等.四足机器人坡面静步态平衡方法研究[J]. 机械科学与技术,2009,28(4):436-441. |
| Feng Hua-shan, Wang Run-xiao, Zhao Guo-bin,et al. A balance method for the static gait of a quadruped robot over a slope[J]. Mechanical Science and Technology for Aerospace Engineering,2009,28(4): 436-441. | |
| 10 | 汪山人. 仿生恐龙机器人的步态仿真及系统实现[D]. 成都:电子科技大学自动化工程学院, 2018. |
| Wang Shan-ren. Gait simulation and system realization of bionic dinosaur robot[D]. Chengdu: School of Automation Engineering, University of Electronic Science and Technology of China, 2018. | |
| 11 | 张帅帅, 荣学文, 李贻斌, 等.崎岖地形环境下四足机器人的静步态规划方法[J].吉林大学学报: 工学版, 2016, 46(4): 1287-1296. |
| Zhang Shuai-shuai, Rong Xue-wen, Li Yi-bin, et al. Static gait planning method for quadruped robots on rough terrains[J]. Journal of Jilin University (Engineering and Technology Edition), 2016,46(4):1287-1296. | |
| 12 | Fankhauser P, Bjelonic M, Bellicoso C D, et al. Robust rough-terrain locomotion with a quadrupedal robot[C]∥2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 2018: 1-8. |
| 13 | Bazeille S, Barasuol V, Focchi M, et al. Vision enhanced reactive locomotion control for trotting on rough terrain[C]∥2013 IEEE Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 2013: 1-6. |
| 14 | Buchli J, Kalakrishnan M, Mistry M, et al. Compliant quadruped locomotion over rough terrain[C]∥2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, USA, 2009: 814-820. |
| 15 | Kalakrishnan M, Buchli J, Pastor P, et al. Fast, robust quadruped locomotion over challenging terrain[C]∥2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA,2010: 2665-2670. |
| 16 | Kalakrishnan M, Buchli J, Pastor P, et al. Learning, planning, and control for quadruped locomotion over challenging terrain[J]. The International Journal of Robotics Research, 2011, 30(2): 236-258. |
| 17 | Zico K J, Ng A Y. The stanford littledog: a learning and rapid replanning approach to quadruped locomotion [J]. The International Journal of Robotics Research, 2011, 30(2): 150-174. |
| 18 | Zucker M, Ratliff N, Stolle M, et al. Optimization and learning for rough terrain legged locomotion [J]. The International Journal of Robotics Research, 2011, 30(2): 175-191. |
| 19 | Shao X, Yang Y, Wang W. Obstacle crossing with stereo vision for a quadruped robot[C]∥IEEE International Conference on Mechatronics and Automation, Chengdu, China, 2012: 1738-1743. |
| 20 | Havoutis I, Ortiz J, Bazeille S, et al. Onboard perception-based trotting and crawling with the hydraulic quadruped robot (HyQ)[C]∥2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 2013: 6052-6057. |
| 21 | Graves A, Mohamed A, Hinton G. Speech recognition with deep recurrent neural networks[C]∥2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 2013: 6645-6649. |
| 22 | Cho K, van Merriënboer B, Bahdanau D, et al. On the properties of neural machine translation: encoder-decoder approaches[C]∥8th Workshop on Syntax, Semantics and Structure in Statistical Translation, Doha, Qatar, 2014: 103-111. |
| [1] | Xian-yu QI,Wei WANG,Lin WANG,Yu-fei ZHAO,Yan-peng DONG. Semantic topological map building with object semantic grid map [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 569-575. |
| [2] | Ang LI,Hong-yuan YANG,Xiao-meng LEI,Kai-wen SONG,Cheng-hui QIAN. Closed-loop control of traveling attitude of hexapod robot based on equivalent connecting link model [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1696-1708. |
| [3] | Xue-yong LI,Zhong-qiu ZHAO,Chun-song ZHANG,Chang-hou LU. Finite element based calculation method of human⁃robot interaction force [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1612-1619. |
| [4] | Ming LIU,Xue-wen RONG,Yi-bin LI,Shuai-shuai ZHANG,Yan-fang YIN,Jiu-hong RUAN. Speed adaptive control of mobile robot based on terrain clustering analysis [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1496-1505. |
| [5] | Shu-you YU,Huan CHANG,Ling-yu MENG,Yang GUO,Ting QU. Disturbance observer based moving horizon control for path following problems of wheeled mobile robots [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1097-1105. |
| [6] | Ting ZHOU,Yu-gong XU,Bin WU. Adaptive fractional PIλDμ sliding mode control method for speed control of spherical robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 728-737. |
| [7] | Bing-hai ZHOU,Qiong WU. Balancing and bi⁃objective optimization of robotic assemble lines [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 720-727. |
| [8] | Ming-wei HU,Hong-guang WANG,Xin-an PAN. Global structural optimization design of collaborative robots using orthogonal design [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 370-378. |
| [9] | Ai-guo WU,Jun-qing HAN,Na DONG. Adaptive sliding mode control based on ultra⁃local model for robotic manipulator [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1905-1912. |
| [10] | Yun-wei ZHAO,De-xu GENG,Xiao-min LIU,Qi LIU. Implementation and stability on turning with constant radius of pneumatic flexible hexapod robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 472-482. |
| [11] | Fu LIU,Yi AN,Bo DONG,Yuan-chun LI. Decentralized energy guaranteed cost decentralized optimal control of reconfigurable robots based on ADP [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 342-350. |
| [12] | Bing-hai ZHOU,Qiong WU. Balancing and optimization of robotic assemble lines withtool and space constraint [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 2069-2075. |
| [13] | Fang-wu MA,Li-wei NI,Liang WU,Jia-hong NIE,Guang-jian XU. Position and attitude closed loop control of wheel⁃leggedall terrain mobile robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 1745-1755. |
| [14] | Hai⁃ying WEN,Xiang REN,Wei⁃liang XU,Ming CONG,Wen⁃long QIN,Shu⁃hai HU. Bionic design and experimental test of temporomandibular joint for masticatory robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 943-952. |
| [15] | GU Wan-li,WANG Ping,HU Yun-feng,CAI Shuo,CHEN Hong. Nonlinear controller design of wheeled mobile robot with H∞ performance [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1811-1819. |
|
||