Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (2): 549-556.doi: 10.13229/j.cnki.jdxbgxb20191088
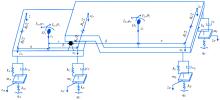
Dynamic modeling and analysis of semi⁃trailers considering ride and lateral motions
Hong-xue LI( ),Shi-wu LI,Wen-cai SUN(),Lin-hong WANG,Zhi-fa YANG
),Shi-wu LI,Wen-cai SUN(),Lin-hong WANG,Zhi-fa YANG
- College of Transportation,Jilin University,Changchun 130022,China
CLC Number:
- U469.5



| 1 | Mendes A D S, Fleury A D T, Ackermann M. Assessing the influence of the road-tire friction coefficient on the yaw and roll stability of articulated vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(12): 2987-2999. |
| 2 | Sun W, Li Y, Huang J. Efficiency improvement of vehicle active suspension based on multi-objective integrated optimization[J]. Journal of Vibration and Control, 2017, 23(4): 539-554. |
| 3 | 王德军, 杜婉彤, 王晰聪. 基于模型分解的车辆侧倾控制器设计[J]. 吉林大学学报: 信息科学版, 2016, 34(2): 81-87. |
| Wang De-jun, Du Wan-tong, Wang Xin-cong. Vehicle roll controller design based on model decomposition[J]. Journal of Jinlin University (Information Science Edition), 2016, 34(2): 81-87. | |
| 4 | Islam M M, He Y, Zhu S L. A comparative study of multi-trailer articulated heavy-vehicle models[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2015, 229(9): 1200-1228. |
| 5 | Li H X, Li S W, Sun W C, et al. Vibration and handling stability analysis of articulated vehicle with hydraulically interconnected suspension[J]. Journal of Vibration and Control, 2019, 25(13): 1899-1913. |
| 6 | Biglarbegian M, Zu J W. Tractor-semitrailer model for vehicles carrying liquids[J]. Vehicle System Dynamics, 2016, 44(11): 871-885. |
| 7 | 刘献栋, 吕海波, 张红卫, 等. 半挂汽车列车结构参数及模型处理方式对平顺性的影响[J]. 重庆交通大学学报: 自然科学版, 2015, 34(5): 139-144. |
| Liu Xian-dong, Lv Hai-bo, Zhang Hong-wei, et al. Effect of structure parameters and model processing method of tractor-semitrailer combination on the ride performance[J]. Journal of Chongqing Jiaotong University (Natural Science), 2015, 34(5): 139-144. | |
| 8 | 李韶华, 杨绍普, 陈立群. 三向耦合非线性重型汽车建模及动力学分析[J]. 振动与冲击, 2014, 33(22): 131-138. |
| Li Shao-hua, Yang Shao-pu, Chen Li-qun. Modeling and dynamic analysis of a non-linear heavy vehicle with three-directional coupled motions[J]. Journal of Vibration and Shock, 2014, 33(22): 131-138. | |
| 9 | 宋康, 陈潇凯, 林逸. 汽车行驶动力学性能的多目标优化[J]. 吉林大学学报: 工学版, 2015, 45(2): 352-357. |
| Song Kang, Chen Xiao-kai, Lin Yi. Multi-objective optimization of vehicle ride dynamic behaviors[J]. Journal of Jinlin University (Engineering and Technology Edition), 2015, 45(2): 352-357. | |
| 10 | 徐程, 曲昭伟, 金盛. 考虑侧向偏移的车辆跟驰行为建模及仿真[J]. 吉林大学学报: 工学版, 2014, 44(6): 1609-1615. |
| Xu Cheng, Qu Zhao-wei, Jin Sheng. Modeling and simulation of car following behavior considering lateral separation[J]. Journal of Jinlin University (Engineering and Technology Edition), 2014, 44(6): 1609-1615. | |
| 11 | Li X, Wang G, Yao Z. Dynamic model and validation of an articulated steering wheel loader on slopes and over obstacles[J]. Vehicle System Dynamics, 2013, 51(9): 1305-1323. |
| 12 | Zhang Y, Khajepour A, Huang Y. Multi-axle/articulated bus dynamics modeling: a reconfigurable approach[J]. Vehicle System Dynamics, 2018, 56(9): 1315-1343. |
| 13 | Aoki A, Marumo Y, Kageyama I. Effects of multiple axles on the lateral dynamics of multi-articulated vehicles[J]. Vehicle System Dynamics, 2013, 51(3): 338-359. |
| 14 | Pan H, Sun W, Jing X. Adaptive tracking control for active suspension systems with non-ideal actuators[J]. Journal of Vibration and Control, 2017, 399: 2-20. |
| 15 | 喻凡. 汽车系统动力学[M]. 北京: 机械工业出版社, 2016. |
| [1] | Guo-ying CHEN,Jun YAO,Peng WANG,Qi-kun XIA. Stability control strategy for rear in⁃wheel motor drive vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 397-405. |
| [2] | Fu-gang ZHAI,Yan-bin YIN,Chao LI,Wei TIAN,Zi-shi QIAO. Stiffness modeling and feedforward control of servo electric cylinder drive system [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 442-449. |
| [3] | Jian ZHANG,Kun-run WU,Min YANG,Bin RAN. Double⁃ring adaptive control model of intersection during intelligent and connected environment [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 541-548. |
| [4] | Dian-hai WANG,Xin-yi SHEN,Xiao-qin LUO,Sheng JIN. Offset optimization with minimum average vehicle delay [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 511-523. |
| [5] | Liang CHU,Li-jia DONG,Nan XU,Li-feng ZHANG,Yi-fan JIA,Zhi-hua YANG. Powertrain configuration and power distribution of extended electric vehicle based on open winding motor [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 72-82. |
| [6] | Xiao-hua ZENG,Xiao-jian LI,Shao-feng DU,Tao MA,Zhen-wei WANG,Da-feng SONG. Development of vehicle controller for multi-wheel hybrid-driven unmanned frame vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 63-71. |
| [7] | De-feng HE,Jie LUO,Xiao-xiang SHU. Delay-feedback predictive cruise control of autonomous and connected vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 349-357. |
| [8] | Yun-feng HU,Yi-tong DING,Zhi-xin ZHAO,Bing-jing JIANG,Jin-wu GAO. Data-driven modeling and receding optimization control of diesel engine combustion process [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 49-62. |
| [9] | Xue-shen CHEN,Zhu-jian HUANG,Xu MA,Long QI,Gui-jin FANG. Design and test of control system for rice mechanical weeding and seedling-avoiding control [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 386-396. |
| [10] | Ai-guo WU,Jun-qing HAN,Na DONG. Adaptive sliding mode control based on ultra⁃local model for robotic manipulator [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1905-1912. |
| [11] | Chao JIA,Hong-ze XU,Long-sheng WANG. Nonlinear model predictive control for automatic train operation based on multi⁃point model [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1913-1922. |
| [12] | Hai-yan CHEN. Design of remote switching control algorithm for multi-band signal source in distributed communication network [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1886-1893. |
| [13] | Jing LI,Qiu-jun SHI,Liang HONG,Peng LIU. Commercial vehicle ESC neural network sliding mode control based on vehicle state estimation [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1545-1555. |
| [14] | Ji-qing CHEN,Qing-sheng LAN,Feng-chong LAN,Zhao-lin LIU. Trajectory tracking control based on tire force prediction and fitting [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1565-1573. |
| [15] | Wei WANG,Jian-ting ZHAO,Kuan-rong HU,Yong-cang GUO. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 464-471. |
|
||