Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (4): 1144-1152.doi: 10.13229/j.cnki.jdxbgxb.20220623
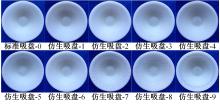
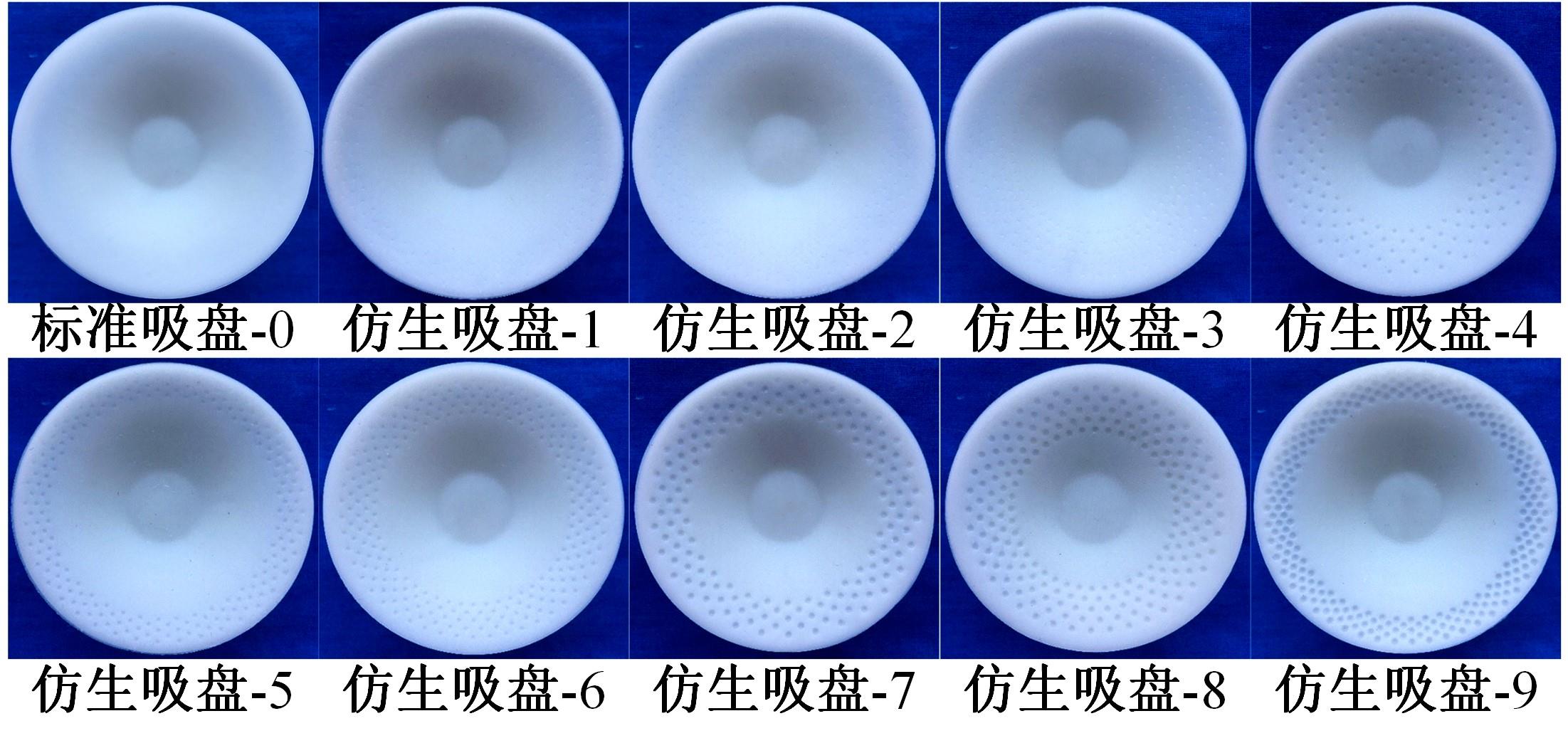
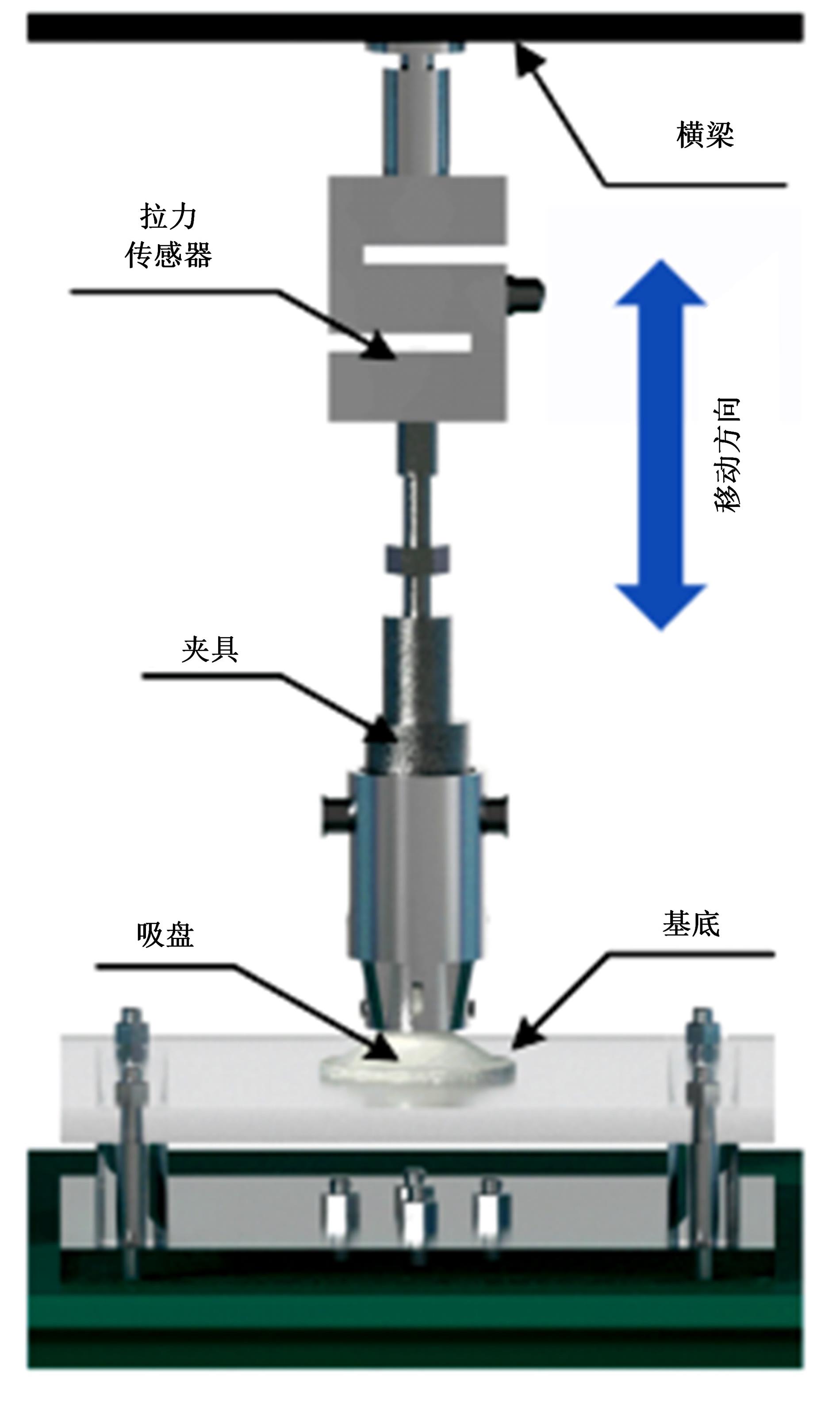
Bionic pit design and experiment of the sucker
Qian CONG1,2( ),Jin XU1,3,Xiao-jie SHI1,3,Jing-fu JIN1,3,Ting-kun CHEN1,3()
),Jin XU1,3,Xiao-jie SHI1,3,Jing-fu JIN1,3,Ting-kun CHEN1,3()
- 1.College of Biological and Agricultural Engineering,Jilin University,Changchun 130022,China
2.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
3.Key Laboratory of Bionic Engineering,Ministry of Education,Jilin University,Changchun 130022,China
CLC Number:
- TB17





| 1 | 苑进, 李扬, 刘雪美, 等. 禽蛋自动捡拾系统结构设计及机械手运动规划[J]. 农业工程学报, 2016, 32(8): 48-55. |
| Yuan Jin, Li Yang, Liu Xue-mei, et al. Structure design of egg auto-picking system and manipulator motion planning[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2016, 32(8): 48-55. | |
| 2 | 黄超, 刘衍聪, 伊鹏. 蛋胚成活性分拣机器人真空吸盘装置设计与试验[J]. 农业工程学报, 2017, 33(16): 276-282. |
| Huang Chao, Liu Yan-cong, Yi Peng. Design and test of vacuum suction device for egg embryo activity sorting robot[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(16): 276-282. | |
| 3 | 常旭, 杨东超, 孙可平, 等. 水平井爬行器中电永磁吸盘的设计与优化[J]. 中国机械工程, 2019, 30(4): 399-405. |
| Chang Xu, Yang Dong-chao, Sun Ke-ping, et al. Design and optimization of electropermanent magnet suckers in horizontal well tractors[J]. China Mechanical Engineering, 2019, 30(4): 399-405. | |
| 4 | Choi M K, Park O K, Choi C, et al. Cephalopod-inspired miniaturized suction cups for smart medical skin[J]. Advanced Healthcare Materials, 2016, 5(1): 80-87. |
| 5 | 毕玉超, 高勇, 丛鑫, 等. ABB拆垛机器人辅助吸盘装置的设计[J]. 烟草科技, 2019, 52(5): 105-108. |
| Bi Yu-chao, Gao Yong, Cong Xin, et al. Design of auxiliary sucker device for ABB unstacking robot[J]. Tobacco Science & Technology, 2019, 52(5): 105-108. | |
| 6 | 秦红斌, 张吉鑫, 陈国良. 一种新型真空吸盘装置[J].真空科学与技术学报, 2017, 37(1): 12-16. |
| Qin Hong-bin, Zhang Ji-xin, Chen Guo-liang. Design optimization of vacuum sucker for high precision flexible assembly fixture of autoglass[J]. Chinese Journal of Vacuum Science and Technology, 2017, 37(1): 12-16. | |
| 7 | 赵军友, 张亚宁, 毕晓东, 等. 喷砂除锈爬壁机器人磁吸附结构优化设计及整机性能试验[J]. 中国石油大学学报: 自然科学版, 2020, 44(4): 94-99. |
| Zhao Jun-you, Zhang Ya-ning, Bi Xiao-dong, et al. Optimum design of magnetic adsorption structure and machine performance test for sand blasting and rust-removing wall-climbing robot[J]. Journal of China University of Petroleum(Edition of Natural Science), 2020, 44(4): 94-99. | |
| 8 | 刘汉邦, 李新荣, 刘立东. 服装面料自动抓取转移方法的研究进展[J]. 纺织学报, 2021, 42(1): 190-196. |
| Liu Han-bang, Li Xin-rong, Liu Li-dong. Research progress of automatic grabbing and transfer methods for garment fabrics[J]. Journal of Textile Research, 2021, 42(1): 190-196. | |
| 9 | Guo T T, Liu X Y, He T F, et al. Synchro-drive-based underwater climbing adsorption robot[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 6250-6257. |
| 10 | 彭宪宇, 马传栋, 纪佳馨,等. 海洋生物水下粘附机理及仿生研究[J]. 摩擦学学报, 2020, 40(6): 816-830. |
| Peng Xian-yu, Ma Chuan-dong, Ji Jia-xin, et al. Underwater adhesion mechanisms and biomimetic study of marine life[J]. Tribology, 2020, 40(6): 816-830. | |
| 11 | Roderick W R T, Cutkosky M R, Lentink D. Bird-inspired dynamic grasping and perching in arboreal environments[J]. Science Robotics, 2021, 6(61): 7562. |
| 12 | 张子啸, 余才林. 真空技术在5G产业链的应用[J].真空科学与技术学报, 2020, 40(12): 1115-1118. |
| Zhang Zi-xiao, Yu Cai-lin. The applications of vacuum technology in the 5G technology [J]. Chinese Journal of Vacuum Science and Technology, 2020, 40(12): 1115-1118. | |
| 13 | 熙鹏. 鲍鱼腹足吸附性研究及仿生吸盘设计与试验[D]. 长春: 吉林大学生物与农业工程学院, 2020. |
| Xi Peng. Study on the adsorption of abalone abdominal foot and the design and experiment of bionic sucker [D]. Changchun: College of Biological and Agricultural Engineering,Jilin University, 2020. | |
| 14 | Wang Y P, Yang X B, Chen Y F, et al. A biorobotic adhesive disc for underwater hitchhiking inspired by the remora suckerfish[J]. Science Robotics, 2017, 2(10):No.eaan8072. |
| 15 | Ditsche P, Summers A. Learning from Northern clingfish (Gobiesox maeandricus): bioinspired suction cups attach to rough surfaces[J]. Philosophical Transactions of the Royal Society B, 2019, 374(1784): No.20190204. |
| 16 | Greco G, Bosia F, Tramacere F, et al. The role of hairs in the adhesion of octopus suckers: a hierarchical peeling approach[J]. Bioinspiration & Biomimetics, 2020, 15(3): No.035006. |
| 17 | Li J, Zhang Y, Liu S, et al. Insights into adhesion of abalone: a mechanical approach [J]. Journal of the Mechanical Behavior of Biomedical Materials, 2018, 77: 331-336. |
| 18 | Kampowski T, Eberhard L, Gallenmuller F,et al. Functional morphology of suction discs and attachment performance of the Mediterranean medicinal leech(Hirudoverbana Carena)[J]. Journal of The Royal Society: Interface, 2016, 13(117): No.20160096. |
| 19 | 陈玉鹏. 仿生湿态粘附微纳界面的构筑与研究[D]. 北京: 中国科学院大学, 2019. |
| Chen Yu-peng. Construction and research of bio-inspired wet adhesive surfaces with micro/nanostructures[D]. Beijing: University of Chinese Academy of Sciences, 2019. | |
| 20 | Qiao S T, Wang L, Jeong H Y, et al. Suction effects in cratered surfaces[J]. Journal of the Royal Society: Interface, 2017, 14: 20170377. |
| 21 | Wang L, Kyoung-Ho H, Qiao S T, et al. Suction effects of crater arrays[J]. Extreme Mechanics Letters, 2019, 30: No.100496. |
| 22 | Wang L, Qiao S T, Lu N S. Effects of surface tension on the suction forces generated by miniature craters[J]. Extreme Mechanics Letters, 2017, 15: 130-138. |
| 23 | Hou J P, Wright E, Bonser R H C, et al. Development of biomimetic squid-inspired suckers[J]. Journal of Bionic Engineering, 2012, 9: 484-493. |
| 24 | Baik S, Kim J, Lee H J, et al. Highly adaptable and biocompatible octopus-like adhesive patches with meniscus-controlled unfoldable 3D microtips for underwater surface and hairy skin[J]. Advanced Science, 2018, 5: No.1800100. |
| 25 | 任露泉. 试验设计及其优化[M]. 北京: 科学出版社,2009: 39-59. |
| 26 | 陈龙, 云忠, 蒋毅. 基于鱼吸附原理的仿生吸盘设计与性能分析[J]. 北京化工大学学报:自然科学版, 2018, 45(6): 100-105. |
| Chen Long, Yun Zhong, Jiang Yi. Design and adsorption performance analysis of a bio-inspired suction cup based on the adsorption principle employed by remoras(sukerfish)[J]. Journal of Beijing University of Chemical Technology(Natural Science), 2018, 45(6): 100-105. | |
| 27 | Sandoval J A, Jadhav S, Quan H C, et al. Reversible adhesion to rough surfaces both in and out of water, inspired by the clingfish suction disc[J]. Bioinspiration & Biomimetics, 2019, 14(6): No.66016. |
| 28 | Zhang Y, Liu Y B, Sui X, et al. A mechatronics-embedded pneumatic soft modular robot powered via single air tube[J]. Applied Sciences, 2019, 9(11): No. 2260. |
| 29 | 张宇. 软体模块化机器人变形分析与协调运动控制研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2020. |
| Zhang Yu. Research on deformation analysis and coordinated locomotion control for soft modular robots [D]. Harbin: School of Mechanical and Electrical Engineering,Harbin Institute of Technology, 2020. |
| [1] | Xin YANG,Yang WANG,Jia-feng SONG,Yong ZHU,Bin-bing HUANG,Shu-cai XU. Design and numerical simulation of bionic sandwich panel based on a shrimp chela structure [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 842-851. |
| [2] | Yong-zhong ZHANG,Yun-hai MA. New honeycomb multi-stage thin-walled structure with high efficiency energy absorption characteristics [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(1): 259-267. |
| [3] | Zhe ZHANG,Shi-da SONG,Guo-hua WANG,Ying-chao ZHANG. Aerodynamic characteristics of a racing car in pitching motion [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2201-2211. |
| [4] | Hui ZHANG,Zhi-ling NIE,Hong-wei XIAO,Dan-xing WANG. Color design of human⁃computer interaction interface for intelligent cockpit of unmanned vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1315-1321. |
| [5] | Guang-qiang ZHU,Tian-yu LI,Fu-jun ZHOU,Wen-ming WANG. Design and experiment of bionic ear picking device for fresh corn [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1231-1244. |
| [6] | Zhen-ning LIU,Ke JIANG,Tao-tao ZHAO,Wen-xuan FAN,Guo-long LU. Development and experimental of high⁃power proton exchange membrane fuel cell test system [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2025-2033. |
| [7] | Yan LIANG,Qiang WANG,Yu-lai SONG,Yao-hui LIU. Performance of repaired 5Cr5MoV die steel [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1301-1307. |
| [8] | Yang ZHAO,Yang XIAO,Hao SUN,Wen-hao HUO,Song FENG,Yong LIAO. Numerical simulation of micro pitting damage characteristics of lubricated contact gears based on contour integral [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 799-810. |
| [9] | Han HUANG,Qing-hao YAN,Zhi-xin XIANG,Xin-tao YANG,Jin-bao CHEN,Shu-cai XU. Crashworthiness investigation and optimization of bionic multi⁃cell tube based on shrimp chela [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(3): 716-724. |
| [10] | Han-chao LIAO,Mi-yuan SHAN. Risk identification method of foundation pit engineering of high⁃rise buildings based on fuzzy clustering maximum tree algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 2892-2897. |
| [11] | Meng ZOU,Zi-qi GUO,Zhen CHEN,Hong-tao CAO,Jian-zhong ZHU,Li-han XU. Experiment on friction and wear characteristics between simulated lunar dust and typical metal materials [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(10): 2307-2315. |
| [12] | Guang-qiang ZHU,Tian-yu LI,Fu-jun ZHOU. Design and experiment of flexible clamping and conveying device for bionic ear picking of fresh corn [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(10): 2486-2500. |
| [13] | Jian-lin ZUO,En-bo LIU,Zheng-bin JIA,Sheng-hao XU,Jian-lin XIAO. Finite element analysis of bionic prosthesis based on design of medial meniscus structure [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2319-2324. |
| [14] | Hai-long WANG,Lin LIU,Min LIN,Dong-mei PEI. Music personalized recommendation algorithm based on k⁃means clustering algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1845-1850. |
| [15] | Yi-ying CHEN,Jing-fu JIN,Qian CONG,Ting-kun CHEN,Lu-quan REN. Influence of media with different low freezing points on ice adhesion strength [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1926-1932. |
|
||