Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (6): 1519-1527.doi: 10.13229/j.cnki.jdxbgxb.20230112
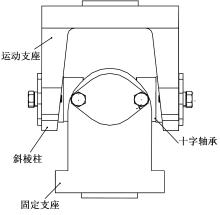
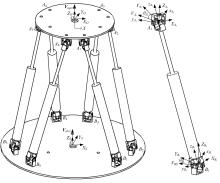
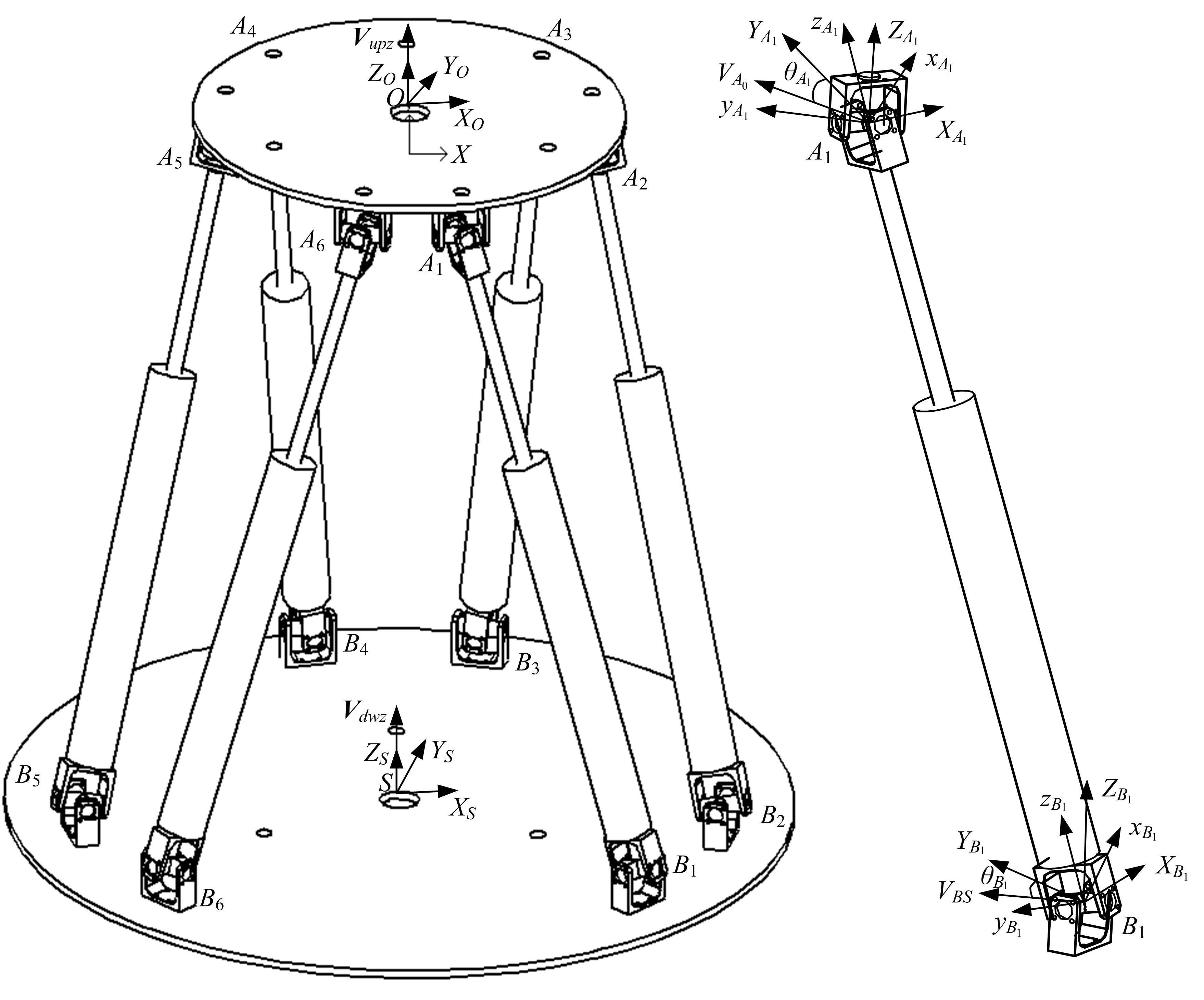
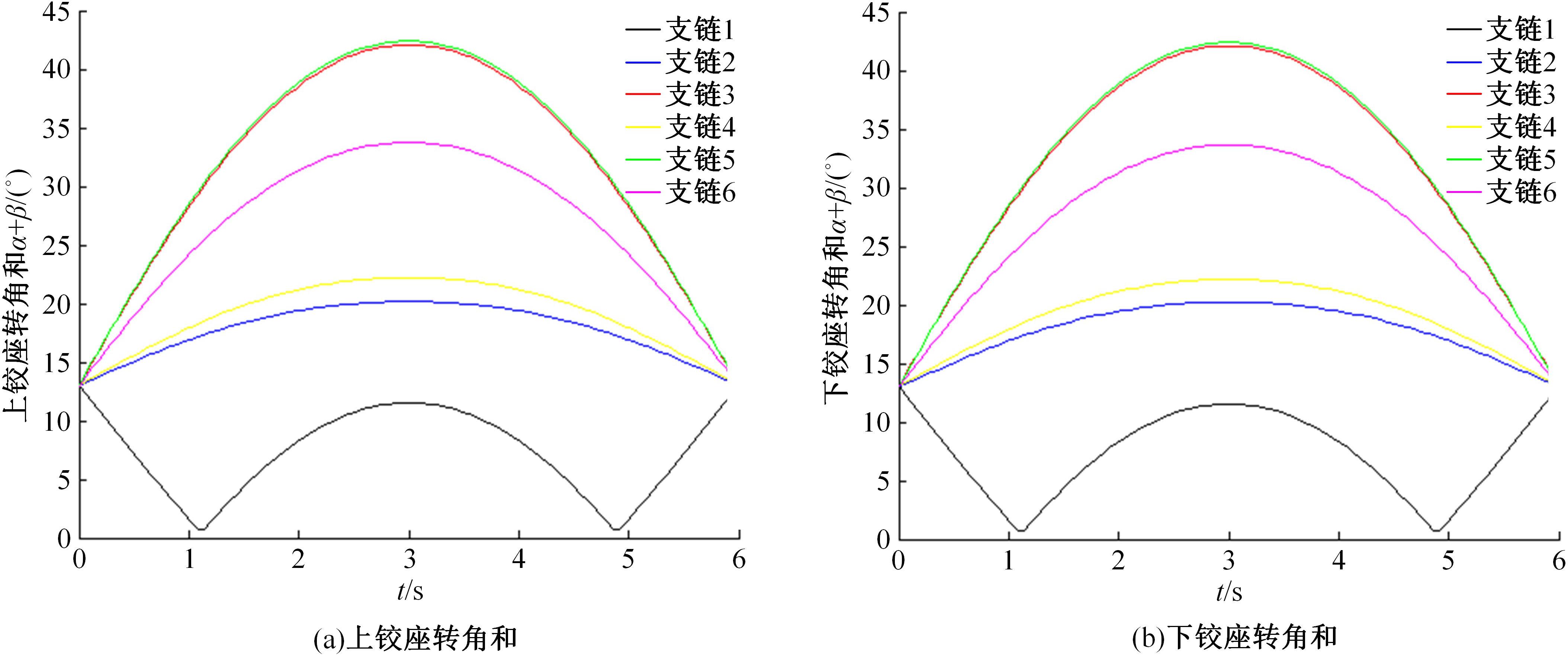
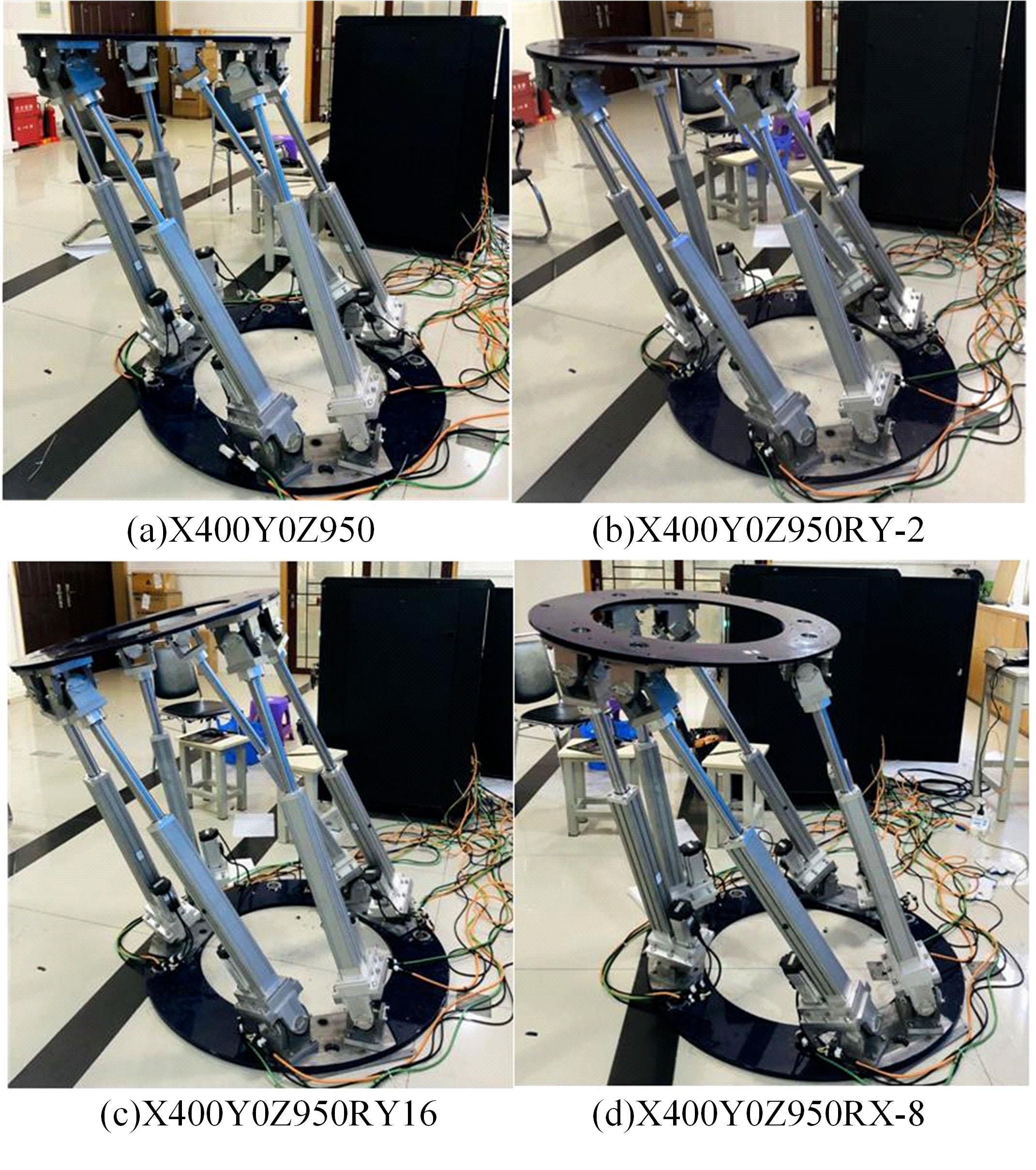
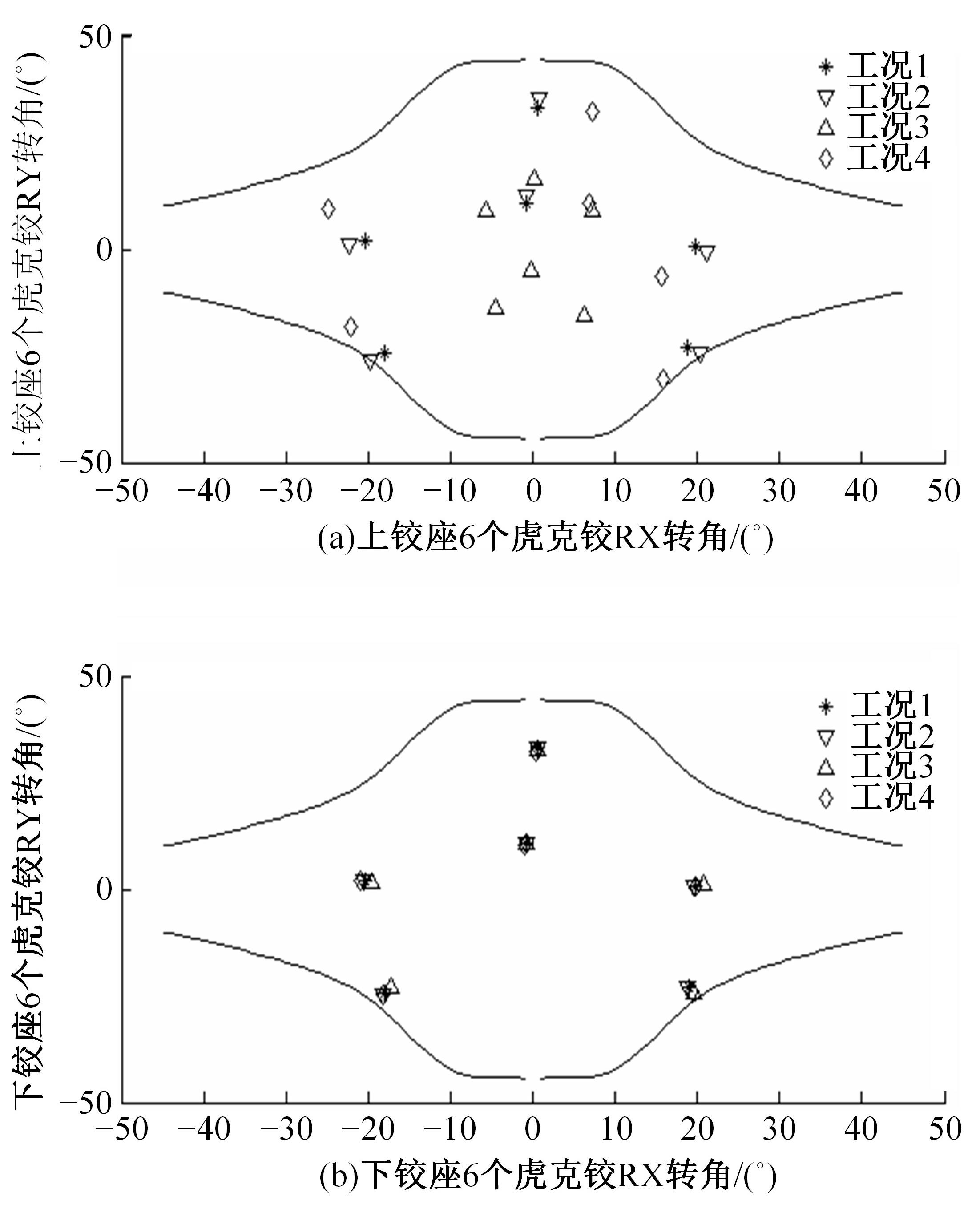
Interference calculation model of Hooke joint of 6-DOF platform considering installation angle
Yang LIU( ),Tao JIANG
),Tao JIANG
- College of Engineering and Design,Hunan Normal University,Changsha 410081,China
CLC Number:
- TP242





| 1 | Furqan M, Suhaib M, Ahmad N. Studies on Stewart platform manipulator: a review[J]. Journal of Mechanical Science and Technology, 2017, 31(9): 4459-4470. |
| 2 | 丁明, 孟帅, 王书恒, 等. 六自由度波浪补偿平台的神经网络自适应反馈线性化控制[J]. 上海交通大学学报, 2022, 56(2): 165-172. |
| Ding Ming, Meng Shuai, Wang Shu-heng, et al. Neural-netwrok-based adaptive feedback linearization control for 6-DOF wave compensation platform[J].Journal of Shanghai Jiaotong University, 2022, 56(2):165-172. | |
| 3 | Li Z G, Yin Z M. The method of the flaps of C919 Aircraft manufacturing quality control[J]. Journal of Aerospace Science and Technology, 2020,8(1): 19-24. |
| 4 | 刘玉梅, 刘丽, 曹晓宁, 等. 转向架动态模拟试验台避撞模型的构建[J]. 吉林大学学报: 工学版, 2018,48(6): 1661-1668. |
| Liu Yu-mei, Liu Li, Cao Xiao-ning, et al. Construction on collision avoidance model of bogie dynamics imulation test bench[J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1661-1668. | |
| 5 | Chen D, Li S Q, Wang J F, et al. A multi-objective trajectory planning method based on the improved immune clonal selection algorithm[J]. Robotics and Computer Integrated Manufacturing, 2019, 59: 431-442. |
| 6 | 杨超, 叶伟, 陈巧红. 并联机构敏感性分析和多目标优化设计方法[J]. 机械工程学报, 2022, 58(19):229-241. |
| Yang Chao, Ye Wei, Chen Qiao-hong. Sensitivity analysis and multi-objective optimization design of parallel manipulators[J]. Journal of Mechanical Engineering, 2022, 58(19): 229-241. | |
| 7 | Li S Q, Chen D, Wang J F. An optimal singularity-free motion planning method for a 6-DOF parallel manipulator[J]. Industrial Robot: the International Journal of Robotics Research and Application, 2020,48(2): 290-299. |
| 8 | Mahmood A, Aminzadeh M, Menhaj M B, et al. A genearalized method for determing load workspace of spatial parallel mechanism[C]∥International Conference on Control and Automation, Xiamen, China, 2010: 1360-1365. |
| 9 | 程颖, 杨德华, 吴常铖, 等. 新型六自由度微动并联 机构的工作空间分析[J]. 机械科学与技术, 2019, 38(3) : 433-439. |
| Cheng Ying, Yang De-hua, Wu Chang-cheng, et al. Workspace analysis of a novel 6-DOF parallel mechanism with micro displacement[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(3): 433-439. | |
| 10 | Pernkopf F, Husty M L. Workspace analysis of stewart-gouph-type parallel manipulators[J]. Journal of Mechanical Engineering Science, 2006, 220(7): 1019-1032. |
| 11 | 陈晓光, 李超峰, 焦胜海, 等. 双端虎克铰Hexaglide并联机构零姿态工作空间分析[J]. 机械设计与制造, 2020, 11: 266-274. |
| Chen Xiao-guang, Li Chao-feng, Jiao Sheng-hai, et al. Position workspace analysis of the hexaglide parallel mechanism with double-end hooke hinges in kinematic chains[J]. Machinery Design and Manufacture, 2020, 11: 266-274. | |
| 12 | 于晖, 孙立宁, 张秀峰, 等. 虎克铰工作空间研究及其在6-HTRT并联机器人中的应用[J]. 中国机械工程, 2002, 13(21): 1830-1834. |
| Yu Hui, Sun Li-ning, Zhang Xiu-feng, et al. Study on hooke joint and its application in 6-HTRT parallel robot[J]. China Mechanical Engineering, 2002, 13(21) :1830-1834. | |
| 13 | Kong M X, Zhang Y, Sun L N. Analysis of a new workspace of the hexaglide as a motion tank[C]∥International Conference on Mechatronics, Kumamoto,Japan, 2007: 1-6. |
| 14 | 孙立宁, 于凌涛, 杜志江, 等. 并联机器人胡克铰工作空间的研究与应用[J]. 机械工程学报, 2006, 42(8): 120-124. |
| Sun Li-ning, Yu Ling-tao, Du Zhi-jiang, et al. Study and application of workspace on hooke joint in parallel robot[J]. Chinese Journal of Mechanical Engineering, 2006, 42(8): 120-124. |
| [1] | Xiao-dan TAN,Yong-peng WANG,Robert Hall,Tian-shuang XU,Qing-xue HUANG. Haul truck dump body optimization for autonomous shovel loading [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1227-1236. |
| [2] | Wei SUN,Jun YANG. Finite element modeling and vibration reduction analysis of cylindrical shell structures with equal⁃angle attachment of piezoelectric shunt patches [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 365-374. |
| [3] | Bin HU,Yi-quan CAI,Xin LUO,Zi-bin MAO,Jun-wei LI,Meng-yu GUO,Jian WANG. Theory and experiment of high⁃speed seed filling in limited gear⁃shaped side space based on seeds group stress [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 574-588. |
| [4] | Fu-zeng YANG,Jing-bin SUN,Ya-nan LI,Ya-zhou ZHANG,Zhi-jie LIU. Design and performance test of image transmission remote control mower in closed orchard [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(1): 281-293. |
| [5] | Hao ZHENG,Li-jun YU,Peng-peng ZHI,Zhong-lai WANG. Dynamic obstacle avoidance strategy for flapping⁃wing micro air vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2732-2740. |
| [6] | Yong-shuo WANG,Jian-ming KANG,Qiang-ji PENG,Ying-kai CHEN,Hui-min FANG,Meng-meng NIU,Shao-wei WANG. Design and experiment of obstacle avoidance weeding machine for fruit trees [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2410-2420. |
| [7] | Guo-yuan QI,Hao CHEN. Observer⁃based control⁃anti⁃disturbance⁃obstacle avoidance of quadrotor unmanned aerial vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 810-822. |
| [8] | Chun-hui LIU,Si-chang WANG,Ce ZHENG,Xiu-lian CHEN,Chun-lei HAO. Obstacle avoidance planning algorithm for indoor navigation robot based on deep learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(12): 3558-3564. |
| [9] | Yang LIU. Calculation method of anti-backward-tilting buffer force of luffing jib tower crane [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(10): 2785-2794. |
| [10] | Yang ZHAO,Yang XIAO,Hao SUN,Wen-hao HUO,Song FENG,Yong LIAO. Numerical simulation of micro pitting damage characteristics of lubricated contact gears based on contour integral [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 799-810. |
| [11] | Wei ZHENG,Jian-jun SUN,Chen-bo MA,Qiu-ping YU,Yu-yan ZHANG,Tao NIU. Research status and prospect of automobile wheel hub machining fixture [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(1): 25-36. |
| [12] | Wei CHEN,Yu-long LEI,Xing-zhong LI,Yao FU,Jian-long HU,Li-guo HOU. Calculation of adhesive wear of involute cylindrical spur gear under low⁃speed conditions [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1628-1634. |
| [13] | Zhen GUO,Hong-ying YU,Zhong-xin HUA,Di ZHAO. Kinematic analysis and simulation of folding process for rigid origami mechanisms [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 66-76. |
| [14] | ZHU Wei,WANG Chuan-wei,GU Kai-rong,SHEN Hui-ping,XU Ke,WANG Yuan. Stiffness and dynamics analysis of a new type of tensegrity parallel mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1777-1786. |
| [15] |
Zu Li-nan,Tian Yan-tao,Mei Hao .
Obstacle avoidance of multi mobile robots based on hierarchical reinforcement learning [J]. 吉林大学学报(工学版), 2006, 36(增刊2): 108-112. |
|
||