Journal of Jilin University(Engineering and Technology Edition) ›› 2018, Vol. 48 ›› Issue (6): 1777-1786.doi: 10.13229/j.cnki.jdxbgxb20170879
Previous Articles Next Articles
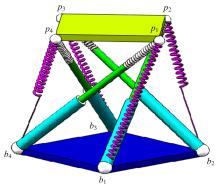
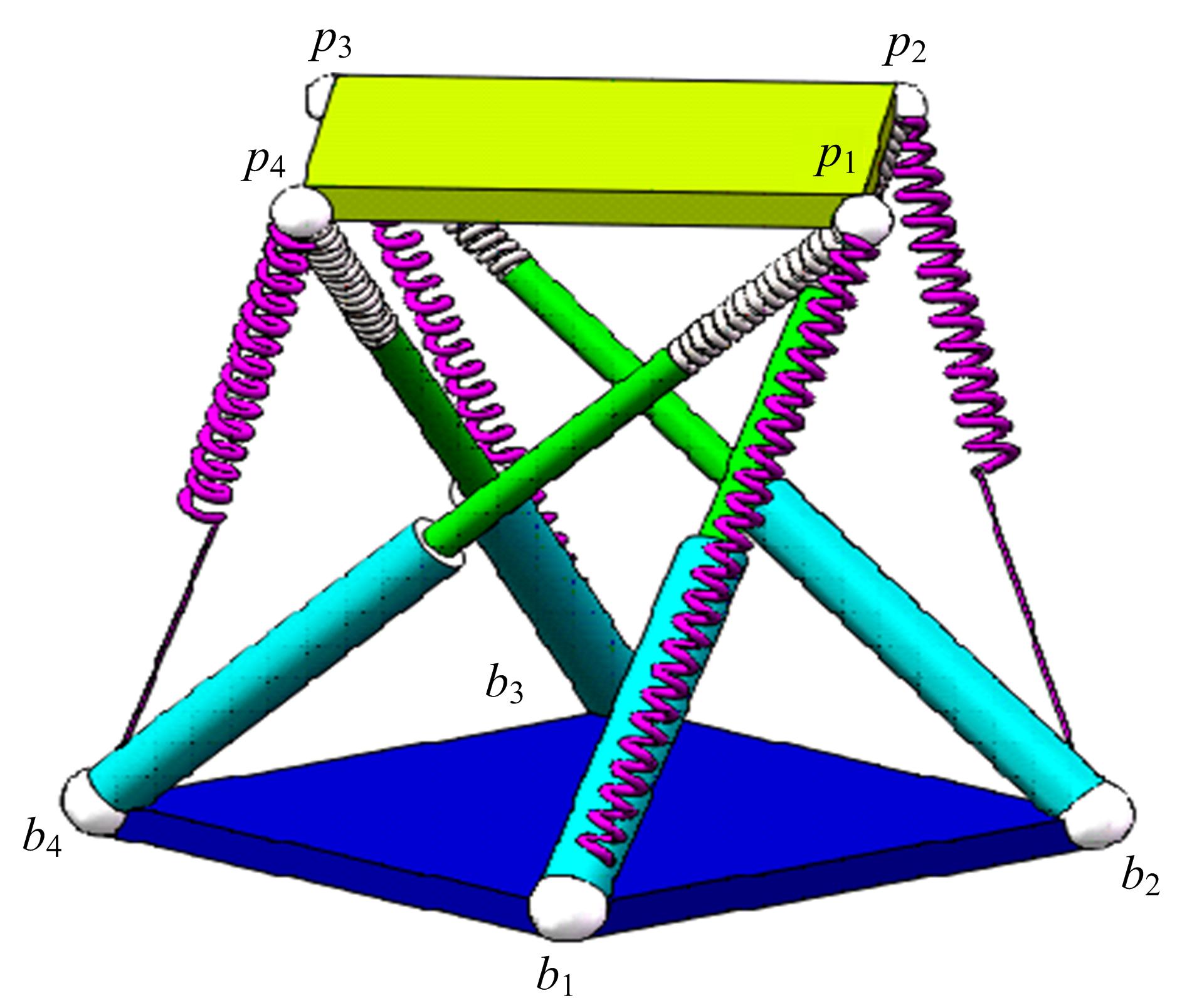
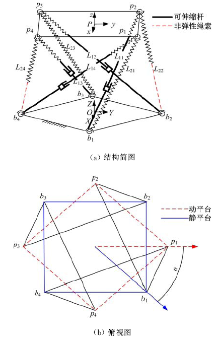
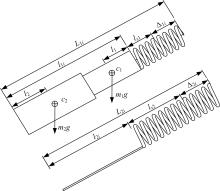
Stiffness and dynamics analysis of a new type of tensegrity parallel mechanism
ZHU Wei( ),WANG Chuan-wei,GU Kai-rong,SHEN Hui-ping,XU Ke,WANG Yuan
),WANG Chuan-wei,GU Kai-rong,SHEN Hui-ping,XU Ke,WANG Yuan
- School of Mechanical Engineering,Changzhou University,Changzhou 213016,China
CLC Number:
- TH112

| [1] | Snelson K D . Continuous tension, discontinuous compression structures[P]. US 3169611, 1965. |
| [2] | Fuller R B . Tensile-integrity structures[P]. US 3063521, 1962. |
| [3] | 李团结, 车明奎 . 张拉整体结构外力与形变间关系分析及实验验证[J]. 西安电子科技大学学报, 2017,44(1):24-28. |
| Li Tuan-jie, Che Ming-kui . Analysis and experimental verification of relationship between external force and deformation of tensegrity structures[J]. Jouranal of Xidian University, 2017,44(1):24-28. | |
| [4] |
罗阿妮, 王龙昆, 刘贺平 . 张拉整体三棱柱构型和结构稳定性分析[J]. 哈尔滨工业大学学报, 2016,48(7):82-87.
doi: 10.11918/j.issn.0367-6234.2016.07.013 |
|
Luo A-ni, Wang Long-kun, Liu He-ping . Analysis of configuration and structural stability of 3-bar tensegrity prism[J]. Journal of Harbin Institute of Technolocy, 2016,48(7):82-87.
doi: 10.11918/j.issn.0367-6234.2016.07.013 |
|
| [5] | Oppenheim I, Williams W . Tensegrity prisms as adaptive structures[J]. ASME Int'l Mechanical Engineering Congress, 1997,54(8):113-120. |
| [6] |
Arsenault M . Determination of the analytical workspace boundaries of a novel 2-DoF planar tensegrity mechanism[J]. Transactions of the Canadian Society for Mechanical Engineering, 2010,34(1):75-91.
doi: 10.1139/tcsme-2010-0005 |
| [7] | Arsenault M, Gosselin C M . Kinematic, static and dynamic analysis of a planar 2-DoF tensegrity mechanism[J]. Mechanism & Machine Theory, 2005,41(9):1072-1089. |
| [8] | Marshall M Q . Analysis of tensegrity-based parallelplatform devices[D]. Gainesville: Department of Mechanical and Aerospace Engineering, University of Florida, 2003. |
| [9] |
Arsenault M, Gosselin C M . Kinematic and static Analysis of 3-PUPS spatial tensegrity mechanism[J]. Mechanism & Machine Theory, 2009,44(1):162-179.
doi: 10.1016/j.mechmachtheory.2008.02.005 |
| [10] | Shekarforoush S M M, Eghtesad M, Farid M. Design of statically balanced six-degree-of-freedom parallel mechanisms based on tensegrity system [C]//ASME 2009 International Mechanical Engineering Congress and Exposition, Lake Buena Vista, Florida,USA, 2009: 245-253. |
| [11] | Abadi B N R, Farid M, Mahzoon M . Introducing and analyzing a novel three-degree-of-freedom spatial tensegrity mechanism[J]. Journal of Computational & Nonlinear Dynamics, 2014,9(2):94-94. |
| [12] |
Moon Y , Crane Ⅲ C D,Roberts R G. Reserve kinetostatic analysis and stiffness of a spatial tensegrity-based compliant mechanism[J]. Mechanism and Machine Theory, 2013,70(6):320-337.
doi: 10.1016/j.mechmachtheory.2013.05.001 |
| [13] | 纪志飞 . 3-SPS张拉整体并联机构的构型综合与运动性能分析及能量采集研究[D]. 西安:西安电子科技大学机电工程学院, 2014. |
| Ji Zhi-fei . On type synthesis, kinematic performances and energy harvesting of 3-SPS tensegrity parallel mechanisms[D]. Xi'an:School of Mechano-electronic Engineering,Xidian University, 2014. | |
| [14] | Chen S, Arsenault M. Workspace computation and analysis of a planar 2-DoF translational tensegrity mechanism [C]//ASME 2010 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Montreal, Quebec, Canada, 2010: 223-232. |
| [15] |
Arsenault M, Gosselin C M . Kinematic and static analysis of a three-degree-of-freedom spatial modular tensegrity mechanism.[J]. International Journal of Robotics Research, 2008,27(8):951-966.
doi: 10.1177/0278364908091152 |
| [16] | Ji Zhe-fei, Li Tuan-jie, Lin Min . Kinematics, singularity, and workspaces of a planar 4-Bar tensegrity mechanism[J]. Journal of Robotics, 2014,2014(11):1-10. |
| [17] |
Ji Zhe-fei, Li Tuan-jie, Lin Min . Kinematic and static analysis of a planar compliant tensegrity-like parallel mechanism[J]. Australian Journal of Mechanical Engineering, 2014,12(1):49-59.
doi: 10.7158/M12-077.2014.12.1 |
| [18] | Ji Zhe-fei, Li Tuan-jie, Lin Min . Kinematics, workspaces and stiffness of a planar class-2 tensegrity mechanism[J]. UPB Sci Bull, 2014,76(3):53-64. |
| [19] | 王征 . 张拉整体结构的找形和稳定性分析[D]. 西安:西安电子科技大学机电工程学院, 2012. |
| Wang Zheng . Analysis of form-finding and stability of tensegrity structures[D]. Xi'an:School of Mechano-electronic Engineering, Xidian University, 2012. | |
| [20] | Wittenburg J . Dynamics of Multibody Systems[M]. New York: Springer, 2008: 80-96. |
| [21] | Ball R S. A Treatise on the Theory of Screws[M]. New York: Cambridge University Press, 1900: 120-160. |
| [1] | JIA Tuo,ZHAO Ding-xuan,CUI Yu-xin. Method of rollover pre-warning for articulated loader [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1762-1769. |
| [2] | LIU Zhao-hui, WANG Chao, LYU Wen-hong, GUAN Xin. Identification of data characteristics of vehicle running status parameters by nonlinear dynamic analysis [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1405-1410. |
| [3] | HU Man-jiang, LUO Yu-gong, CHEN Long, LI Ke-qiang. Vehicle mass estimation based on longitudinal frequency response characteristics [J]. 吉林大学学报(工学版), 2018, 48(4): 977-983. |
| [4] | ZHANG Lin, ZHANG Xin-jie, GUO Kong-hui, WANG Chao, LIU Yang, LIU Tao. Rolling window optimization for intelligent vehicle trajectory planning in unknown environment [J]. 吉林大学学报(工学版), 2018, 48(3): 652-660. |
| [5] | SUN Zheng, HUANG Yu-qi, YU Xiao-li. Numerical simulation of flow and heat transfer in journal bearing lubrication [J]. 吉林大学学报(工学版), 2018, 48(3): 744-751. |
| [6] | SU Shu-jie, HE Lu. Transient dynamic congestion evacuation model of pedestrian at walk traffic planning crossroads [J]. 吉林大学学报(工学版), 2018, 48(2): 440-447. |
| [7] | WANG Jing-yu, YU Xu-tao, HU Xing-jun, GUO Peng, XIN Li, GUO Feng, ZHANG Yang-hui. Fluid-induced vibration and flow mechanism of automotive external rearview mirror [J]. 吉林大学学报(工学版), 2017, 47(6): 1669-1676. |
| [8] | ZHANG Zhe, JIA Li-min, QIN Yong, YUN Ting. Equalization-based feedback control model of pedestrian counter flow [J]. 吉林大学学报(工学版), 2017, 47(6): 1728-1737. |
| [9] | LI Jing, ZHANG Jia-xu, ZHANG Yan-hua, CHEN Li-jun. Estimation of vehicle state and parameter based on strong tracking CDKF [J]. 吉林大学学报(工学版), 2017, 47(5): 1329-1335. |
| [10] | XU Jin-kai, WANG Yu-tian, ZHANG Shi-zhong. Dynamic characteristics of a heavy duty parallel mechanism with actuation redundancy [J]. 吉林大学学报(工学版), 2017, 47(4): 1138-1143. |
| [11] | WANG Qian, ZHAO Ding-xuan, ZHAO Ying, CHEN Na. Dynamic analysis of carrier helicopter on complex deck [J]. 吉林大学学报(工学版), 2017, 47(4): 1109-1113. |
| [12] | WAN Ying, ZHAO Wei-qiang, FENG Ran, LING Jin-peng, ZONG Chang-fu, ZHENG Hong-yu. Dynamic modeling and vehicle-liquid coupling characteristic analysis for tank trucks [J]. 吉林大学学报(工学版), 2017, 47(2): 353-364. |
| [13] | ZHANG Yi-hua, XU Hong-guo, LIU Hong-fei, WANG Fa-ji. Energy analysis of lateral instability in vehicle combinations at high-speed step response [J]. 吉林大学学报(工学版), 2017, 47(1): 71-75. |
| [14] | LI Ling, SHI Shu-ming, WANG Xian-bin, YU Zhuang. Stability of high-speed and turning vehicle influenced by engine braking [J]. 吉林大学学报(工学版), 2017, 47(1): 64-70. |
| [15] | JIN Jing-fu, HAN Li-man, CAO Min, LI Yang, QI Ying-chun, CONG Qian. Volume expansion rule of water droplets during freezing process [J]. 吉林大学学报(工学版), 2016, 46(5): 1546-1551. |
|