吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (9): 2666-2675.doi: 10.13229/j.cnki.jdxbgxb.20211293
基于均匀ORB特征的回环检测算法
陈绵书1( ),于录录1,李晓妮1,郑宏宇2
),于录录1,李晓妮1,郑宏宇2
- 1.吉林大学 通信工程学院,长春 130022
2.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
Loop detection based on uniform ORB
Mian-shu CHEN1(),Lu-lu YU1,Xiao-ni LI1,Hong-yu ZHENG2
- 1.College of Communication Engineering,Jilin University,Changchun 130022,China
2.The State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
摘要:
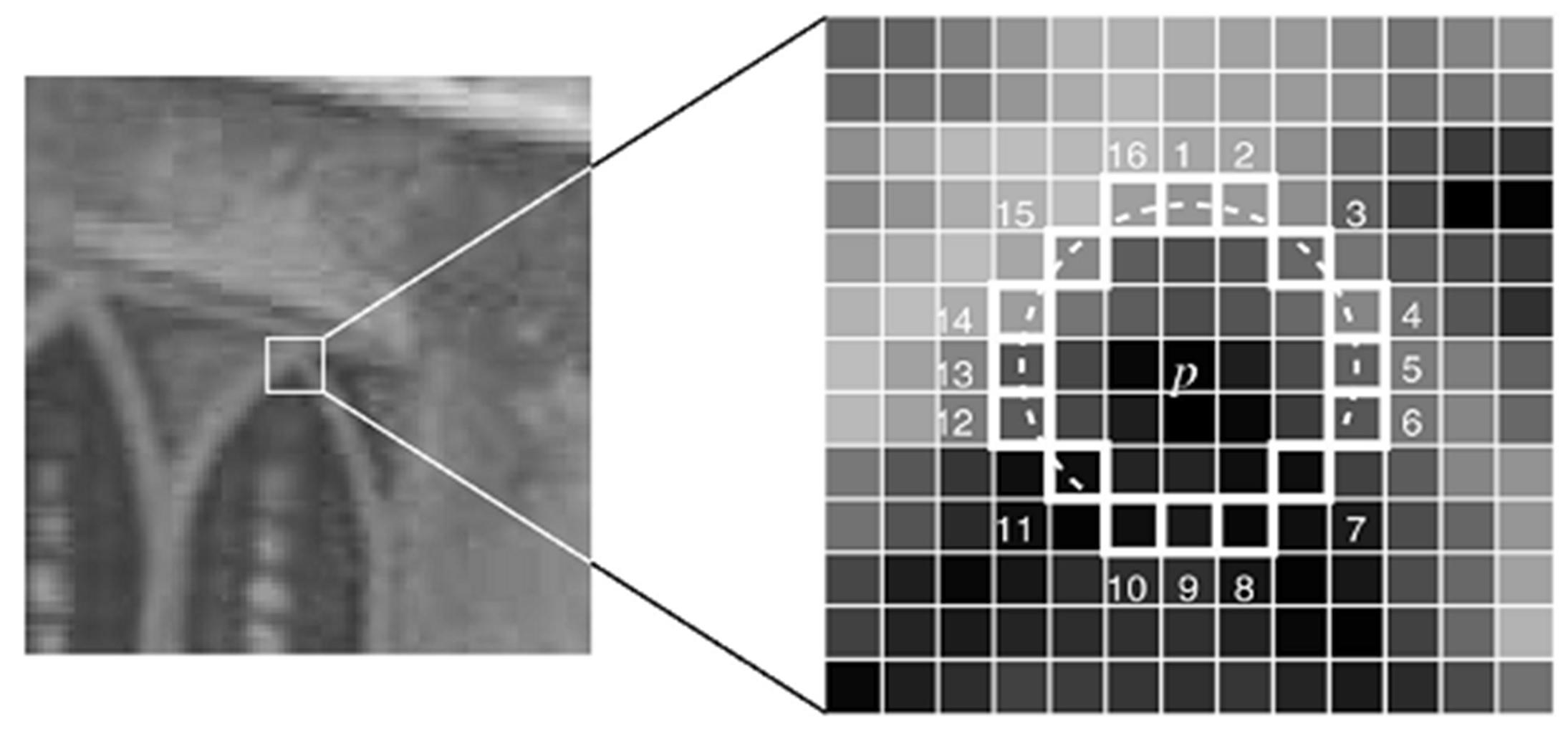
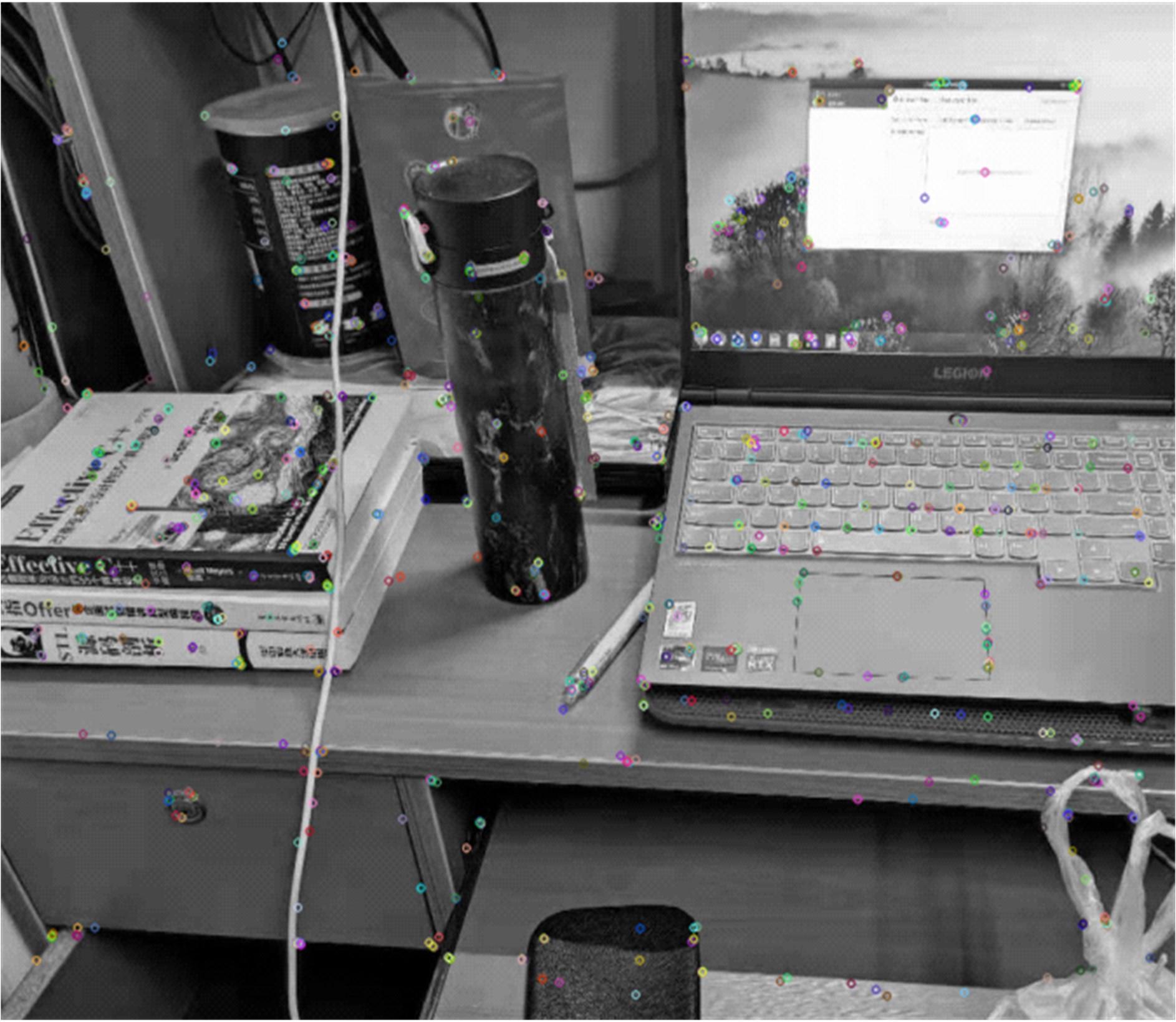
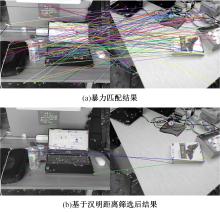
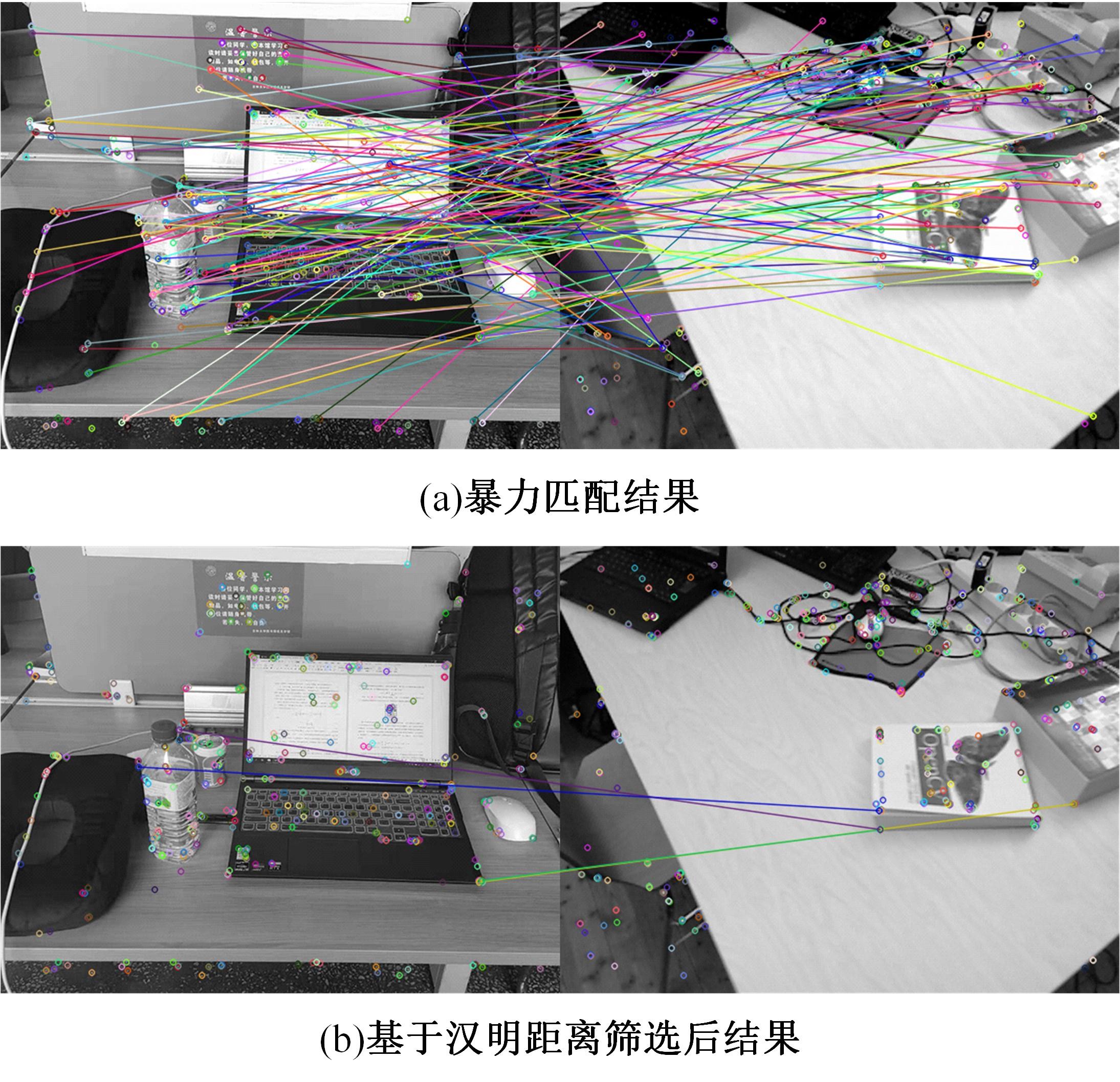
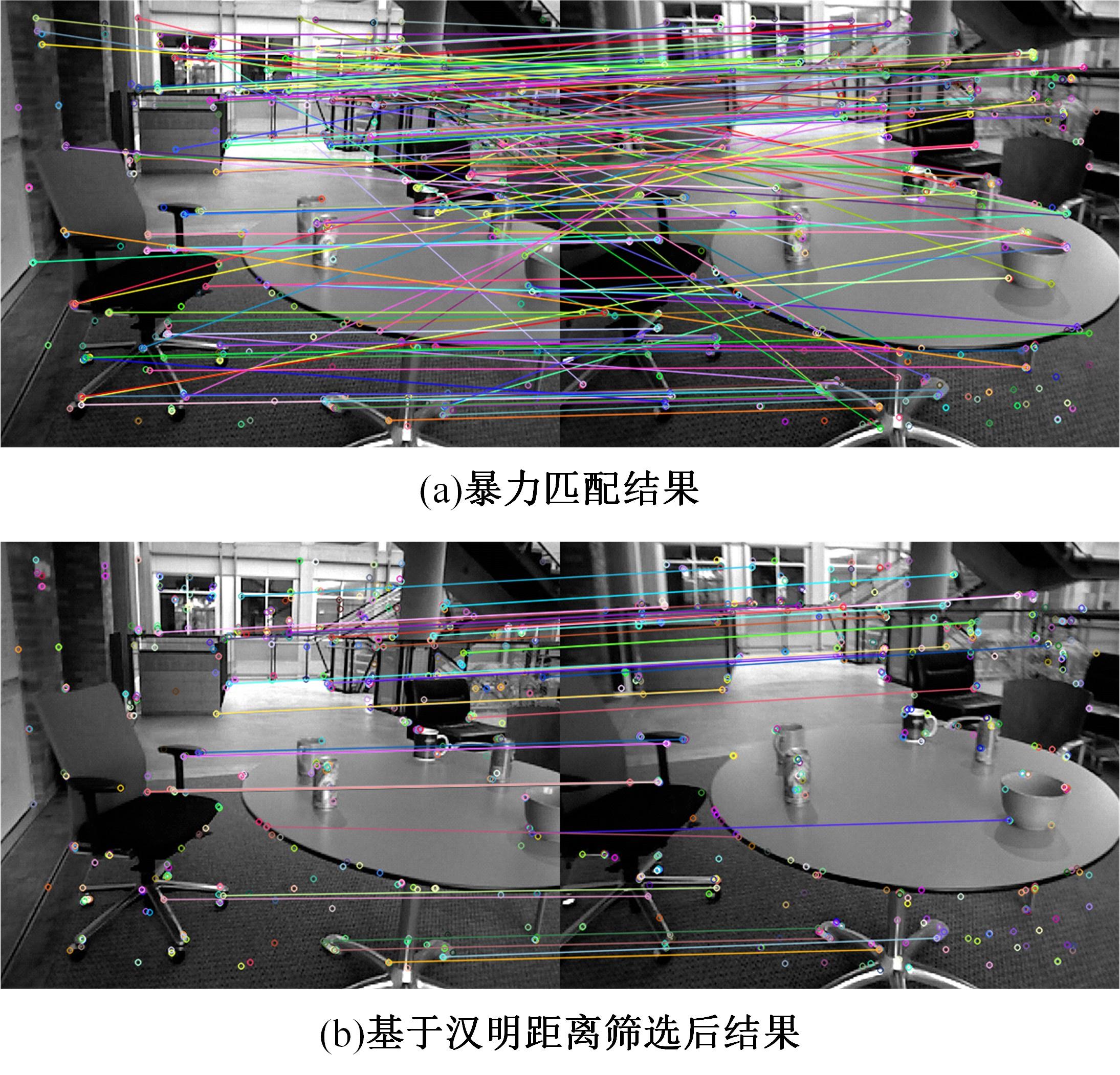
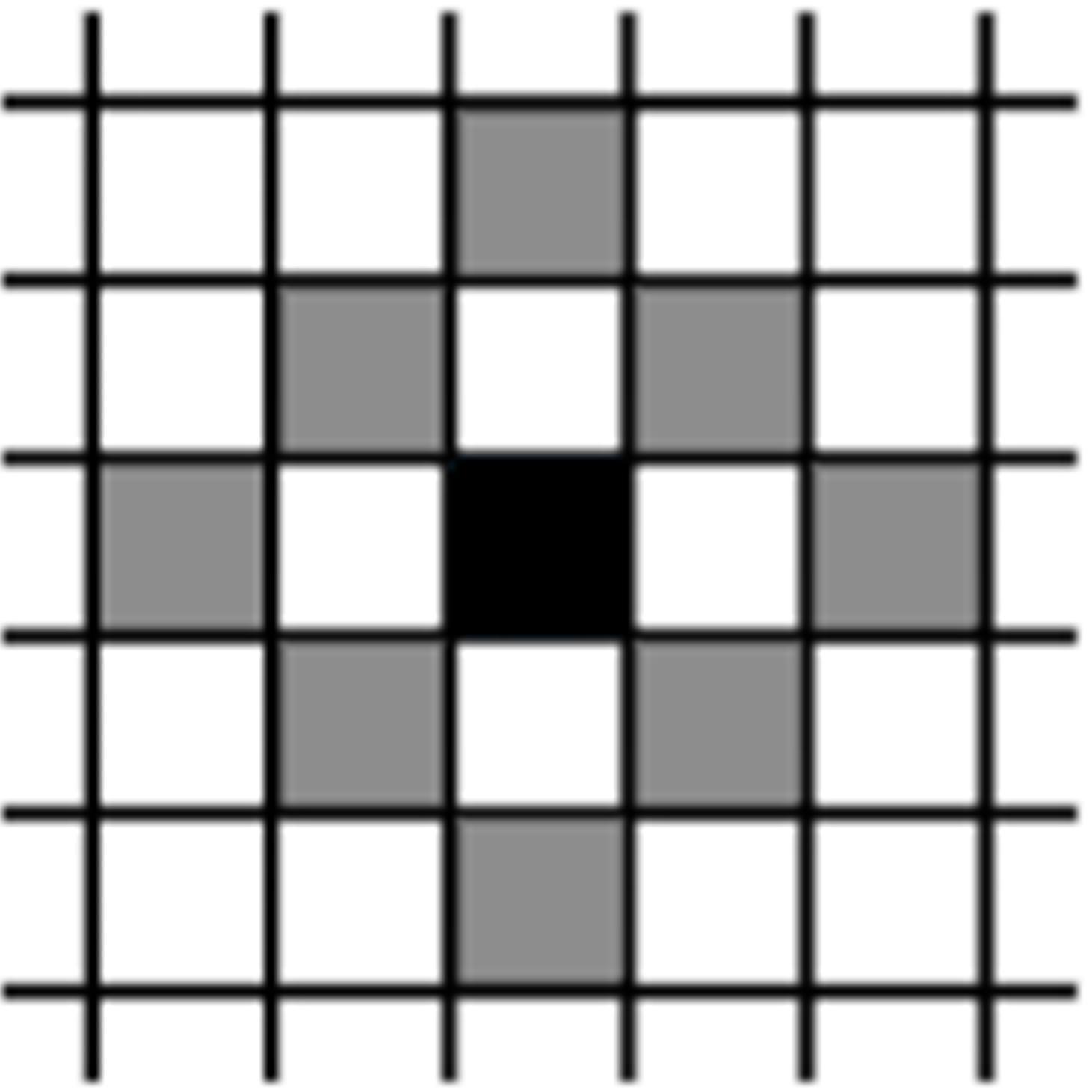
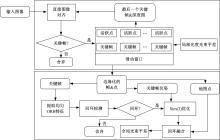
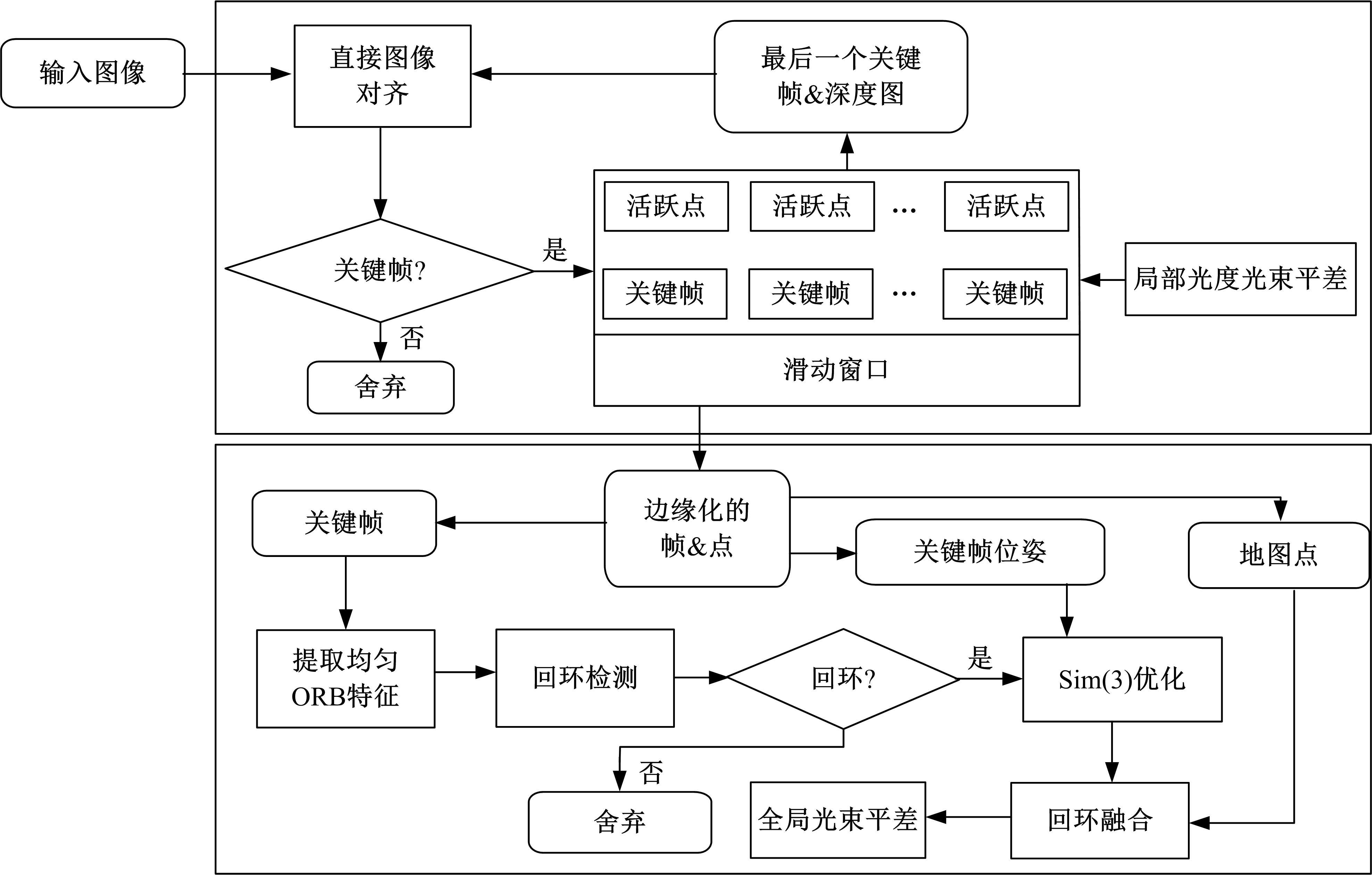
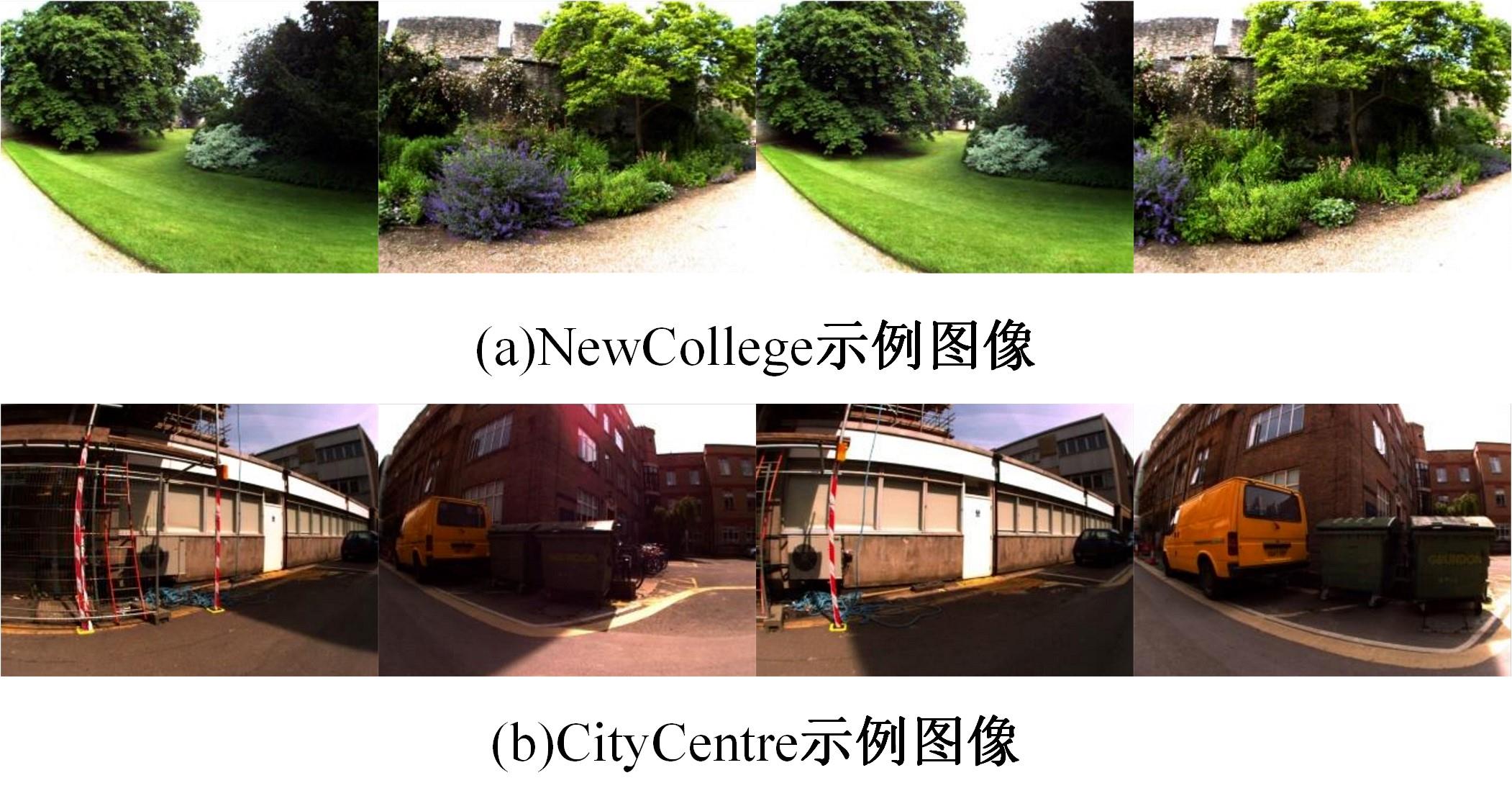
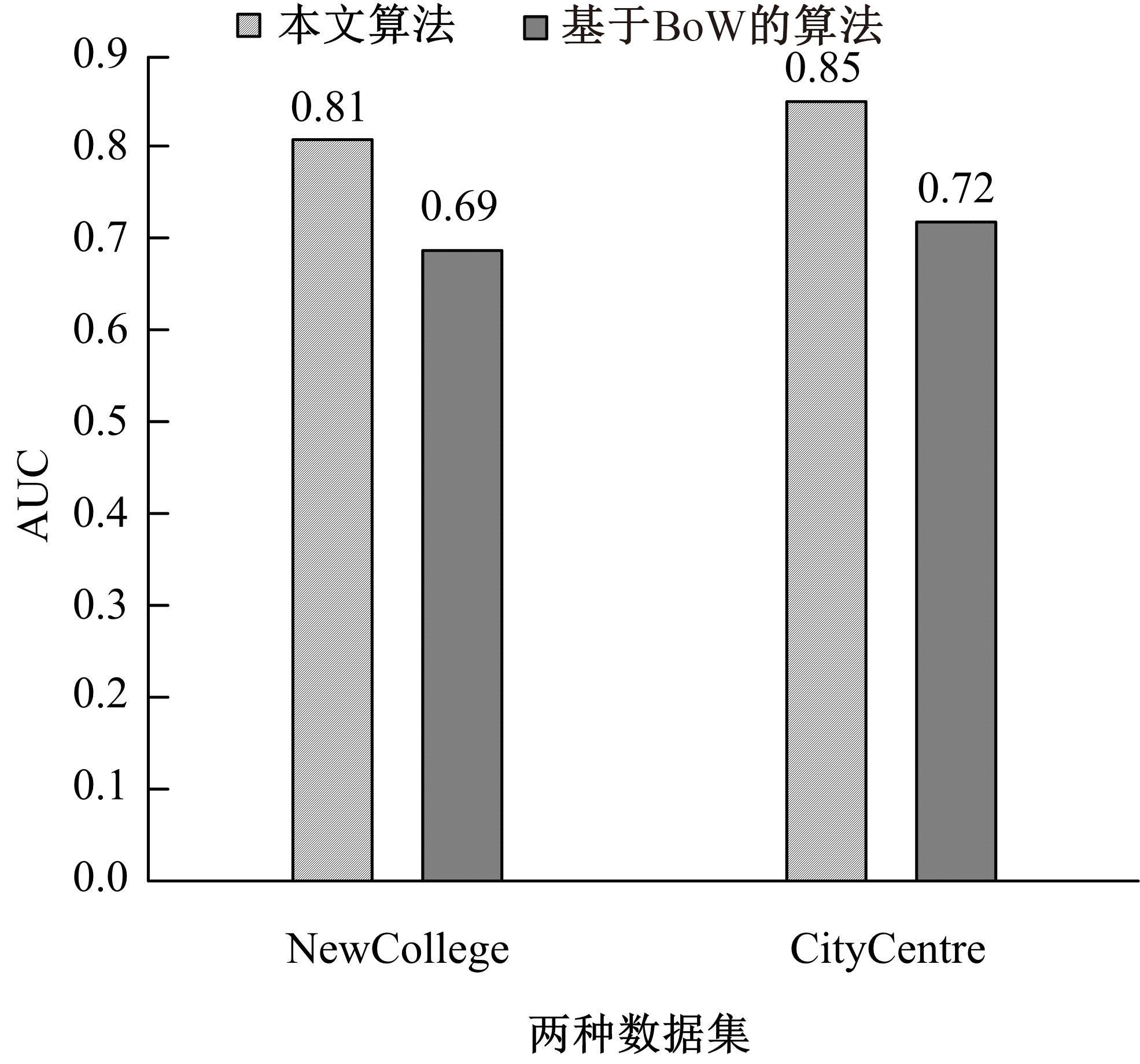
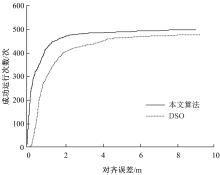
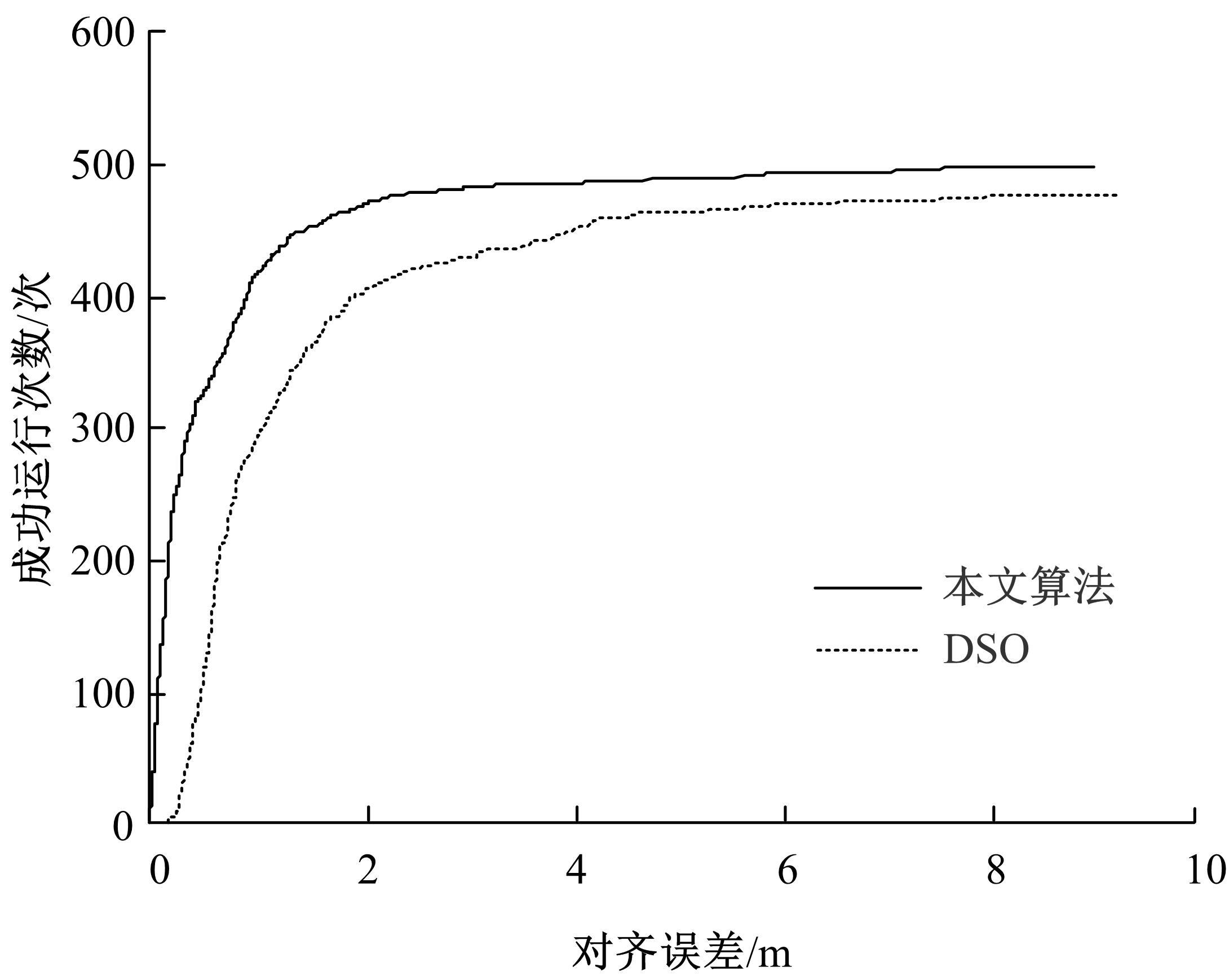
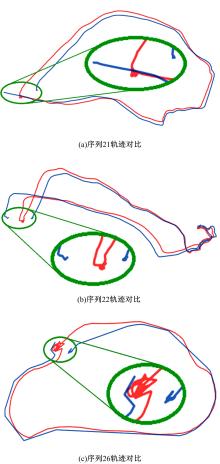
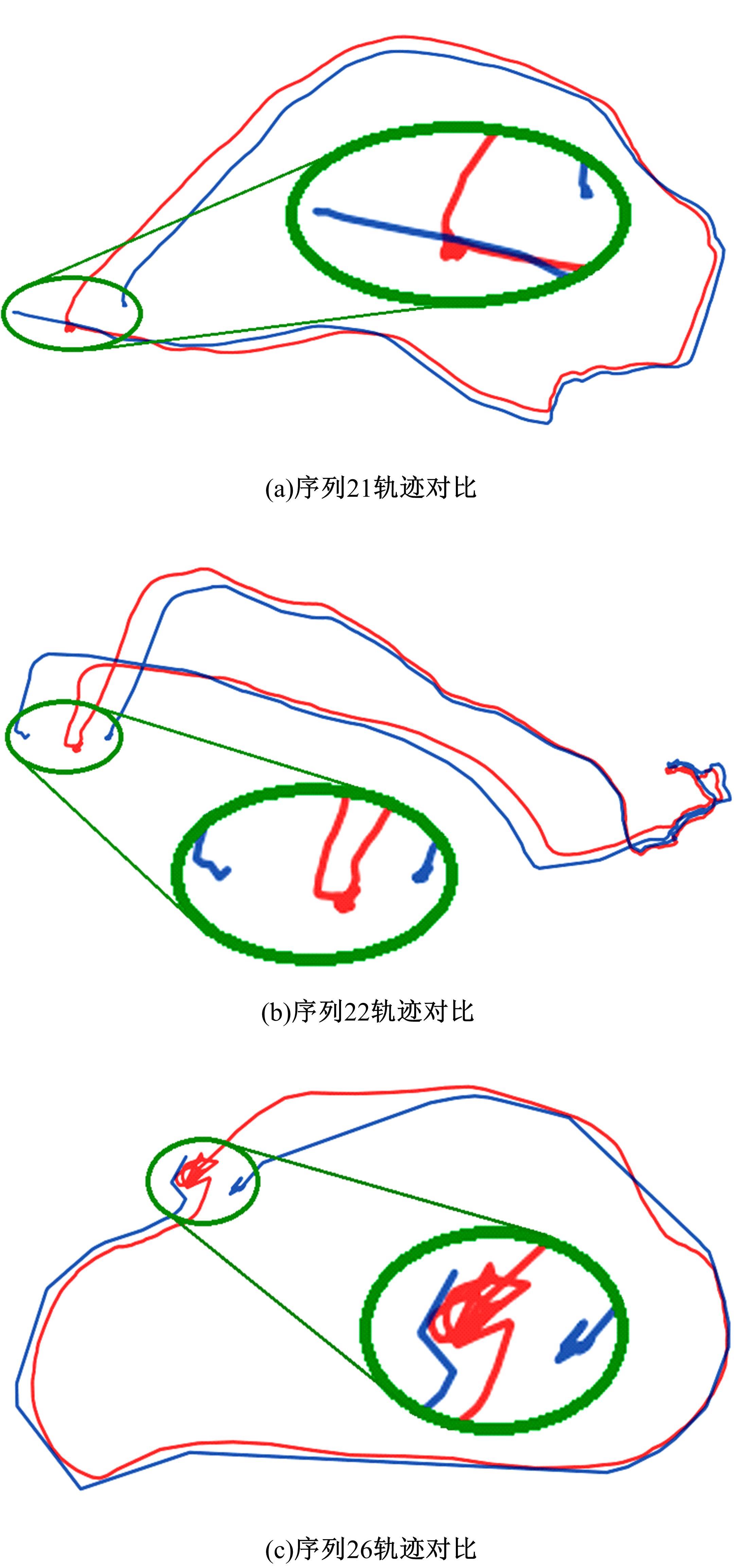
针对传统视觉即时定位与地图构建(SLAM)中ORB特征存在的聚集问题,基于网格划分和关键点分层确定思想,设计了均匀FAST角点提取方法,进而设计了基于均匀分布的ORB特征结合暴力匹配的回环检测方法。与基于词袋(BoW)模型的回环检测算法对比实验表明,本文算法能显著提高回环检测的准确率。基于机器人操作系统(ROS)平台,将均匀ORB特征回环检测模块与直接稀疏里程计(DSO)相结合,设计了一种松耦合式的半直接法SLAM系统。实验结果表明,本文系统具有较高的地图构建性能。
中图分类号:
- TP391.4





| 1 | Durrant-Whyte H, Bailey T. Simultaneous localization and mapping: Part I[J]. IEEE Robotics & Automation Magazine, 2006, 13(2): 99-108. |
| 2 | Bailey T, Durrant-Whyte H. Simultaneous localization and mapping (SLAM): part Ⅱ[J]. IEEE Robotics & Automation Magazine, 2006, 13(3): 108-117. |
| 3 | Angeli A, Filliat D, Doncieux S, et al. Fast and incremental method for loop-closure detection using bags of visual words[J]. IEEE Transactions on Robotics, 2008, 24(5): 1027-1037. |
| 4 | Cummins M, Newman P. FAB-MAP: probabilistic localization and mapping in the space of appearance[J]. International Journal of Robotics Research, 2008, 27(6): 647-665. |
| 5 | Cummins M, Newman P. Appearance-only SLAM at large scale with FAB-MAP 2.0[J]. International Journal of Robotics Research, 2011, 30(9): 1100-1123. |
| 6 | 梁志伟, 陈燕燕, 朱松豪, 等. 基于视觉词典的单目视觉闭环检测算法[J]. 模式识别与人工智能, 2013, 26(6): 561-570. |
| Liang Zhi-Wei, Chen Yan-Yan, Zhu Song-Hao, et al. Loop closure detection algorithm based on monocular vision using visual dictionary[J]. Pattern Recognition and Artificial Intelligence, 2013, 26(6): 561-570. | |
| 7 | Zhang H, Liu Y L, Tan J D. Loop closing detection in RGB-D SLAM combining appearance and geometric constraints[J]. Sensors, 2015, 15(6): 14639-14660. |
| 8 | Oliva A, Torralba A. Modeling the shape of the scene: a holistic representation of the spatial envelope[J]. International Journal of Computer Vision, 2001, 42(3): 145-175. |
| 9 | Yang L, Hong Z. Visual loop closure detection with a compact image descriptor[C]∥2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 2012: No. 13195481. |
| 10 | Yang Z, Pan Y, Deng L, et al. PLSAV: Parallel loop searching and verifying for loop closure detection[J]. IET Intelligent Transport Systems, 2021, 15(5): 683-698. |
| 11 | Bai D D, Wang C Q, Zhang B, et al. CNN feature boosted SeqSLAM for real-time loop closure detection[J]. Chinese Journal of Electronics, 2018, 27(3): 488-499. |
| 12 | Wang Z, Peng Z, Guan Y, et al. Two-stage vSLAM loop closure detection based on sequence node matching and semi-semantic autoencoder[J]. Journal of Intelligent & Robotic Systems, 2021, 101(2): 1-21. |
| 13 | Mukherjee A, Chakraborty S, Saha S K. Detection of loop closure in SLAM: a DeconvNet based approach[J]. Applied Soft Computing Journal, 2019, 80: 650-656. |
| 14 | Liu Qiang, Duan Fu-hai. Loop closure detection using CNN words[J]. Intelligent Service Robotics, 2019, 12(4): 303-318. |
| 15 | Rublee E, Rabaud V, Konolige K, et al. ORB: an efficient alternative to SIFT or SURF[C]∥Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 2012: 2564-2571. |
| 16 | Rosten E, Drummond T. Machine learning for high-speed corner detection[C]∥Computer Vision-ECCV 2006: Part I, Berlin, Germany, 2006: 430-443. |
| 17 | 于录录. 视觉SLAM中回环检测算法的研究[D]. 长春: 吉林大学通信工程学院, 2021. |
| Yu Lu-lu. Research on loop detection in visual SLAM[D]. Changchun: College of Communication Engineering, Jilin University, 2021. | |
| 18 | Quigley M, Conley K, Gerkey B, et al. Ros: an open-source robot operating system[J/OL]. [2021-03-22]. |
| 19 | Engel J, Koltun V, Cremers D. Direct sparse odometry[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(3): 611-625. |
| 20 | Mur-Artal R, Montiel J M M, Tardos J D. ORB-SLAM: a versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| 21 | Arun K S, Huang T S, Blostein S D. Least-squares fitting of two 3-D point sets[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1987, 9(5): 698-700. |
| 22 | Horn B K P. Closed-form solution of absolute orientation using unit quaternions[J]. Journal of the Optical Society of America A, 1987, 4(4): 629-642. |
| 23 | Engel J, Usenko V, Cremers D. A photometrically calibrated benchmark for monocular visual odometry[J/OL]. [2021-03-25]. |
| [1] | 苏育挺,王骥,赵玮,井佩光. 基于动态图卷积的图像情感分布预测[J]. 吉林大学学报(工学版), 2023, 53(9): 2601-2610. |
| [2] | 李寿涛,李嘉霖,孟庆瑜,郭洪艳. 基于点云直方图的回环检测算法和车辆定位方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2395-2403. |
| [3] | 国强,朱国会,李万臣. 基于混沌麻雀搜索算法的TDOA/FDOA定位[J]. 吉林大学学报(工学版), 2023, 53(2): 593-600. |
| [4] | 李厚杰,王法胜,贺建军,周瑜,李威,窦宇轩. 基于伪样本正则化Faster R⁃CNN的交通标志检测[J]. 吉林大学学报(工学版), 2021, 51(4): 1251-1260. |
| [5] | 蒋华伟,杨震,张鑫,董前林. 图像去雾算法研究进展[J]. 吉林大学学报(工学版), 2021, 51(4): 1169-1181. |
| [6] | 王德兴,吴若有,袁红春,宫鹏,王越. 基于多尺度注意力融合和卷积神经网络的水下图像恢复[J]. 吉林大学学报(工学版), 2021, 51(4): 1396-1404. |
| [7] | 金静,党建武,王阳萍,申东. 融合模糊统计纹理特征的多线索粒子滤波跟踪[J]. 吉林大学学报(工学版), 2021, 51(3): 1111-1120. |
| [8] | 郭继昌,乔珊珊. 基于深度图的水下图像复原[J]. 吉林大学学报(工学版), 2021, 51(2): 677-684. |
| [9] | 刘国华,周文斌. 基于卷积神经网络的脉搏波时频域特征混叠分类[J]. 吉林大学学报(工学版), 2020, 50(5): 1818-1825. |
| [10] | 王柯俨,王迪,赵熹,陈静怡,李云松. 基于卷积神经网络的联合估计图像去雾算法[J]. 吉林大学学报(工学版), 2020, 50(5): 1771-1777. |
| [11] | 史再峰,李金卓,曹清洁,李慧龙,胡起星. 基于生成对抗网络的低剂量能谱层析成像去噪算法[J]. 吉林大学学报(工学版), 2020, 50(5): 1755-1764. |
| [12] | 谌华,郭伟,闫敬文,卓文浩,吴良斌. 基于深度学习的SAR图像道路识别新方法[J]. 吉林大学学报(工学版), 2020, 50(5): 1778-1787. |
| [13] | 张薇,韩勇,金铭,乔晓林. 基于托普利兹矩阵集重构的相干信源波达方向估计[J]. 吉林大学学报(工学版), 2020, 50(2): 703-710. |
| [14] | 程艳芬,姚丽娟,袁巧,陈先桥. 水下视频图像清晰化方法[J]. 吉林大学学报(工学版), 2020, 50(2): 668-677. |
| [15] | 于晓辉,张志成,李新波,孙晓东. 基于状态空间模型的指数衰减正弦信号参数估计[J]. 吉林大学学报(工学版), 2019, 49(6): 2083-2088. |
|