吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (10): 3131-3140.doi: 10.13229/j.cnki.jdxbgxb.20231444
• 车辆工程·机械工程 • 上一篇
多自由度尺寸可调下肢外骨骼机器人的设计与分析
丁海涛( ),刘鹏,王京华,马天赐,许星宇,邓泽珩
),刘鹏,王京华,马天赐,许星宇,邓泽珩
- 长春理工大学 机电工程学院,长春 130022
Design and analysis of a multi-degree-of-freedom size-adjustable lower limb exoskeleton robot
Hai-tao DING(),Peng LIU,Jing-hua WANG,Tian-ci MA,Xing-yu XU,Ze-heng DENG
- School of Mechanical and Electrical Engineering,Changchun University of Science and Technology,Changchun 130022,China
摘要:
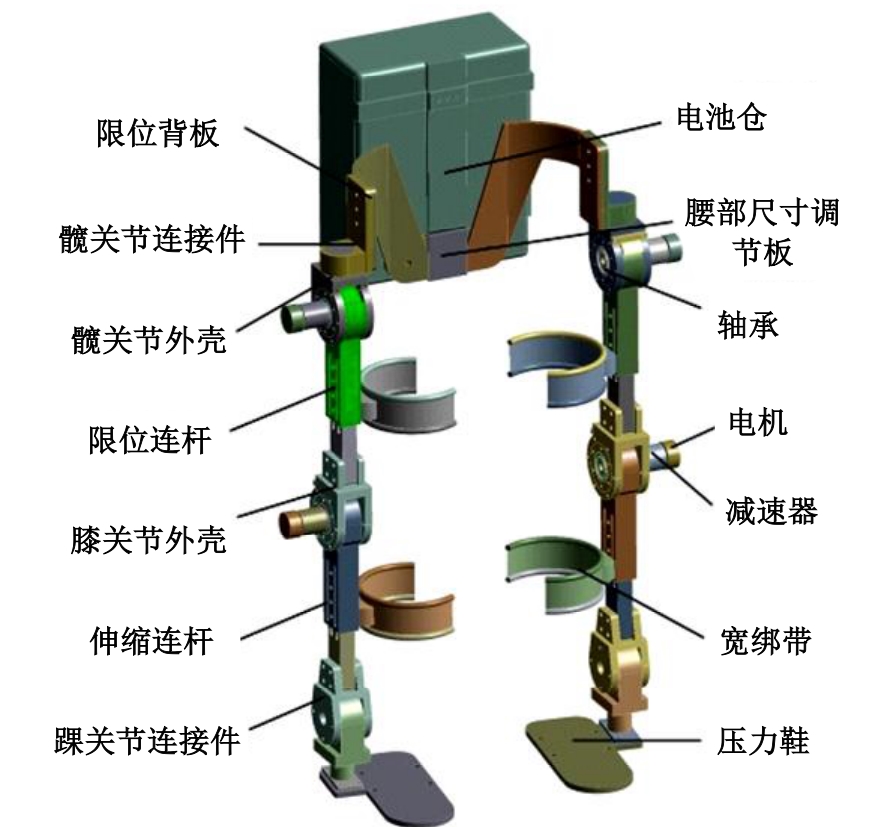
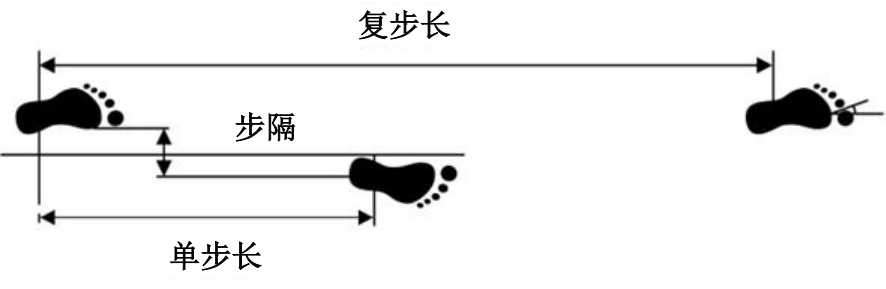
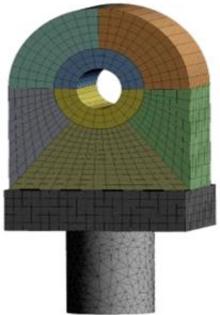
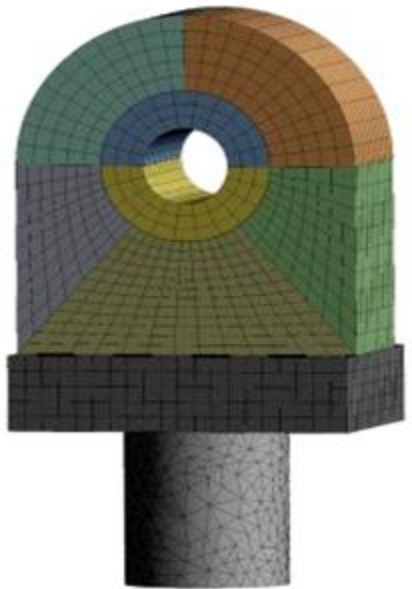
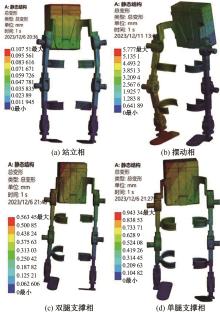
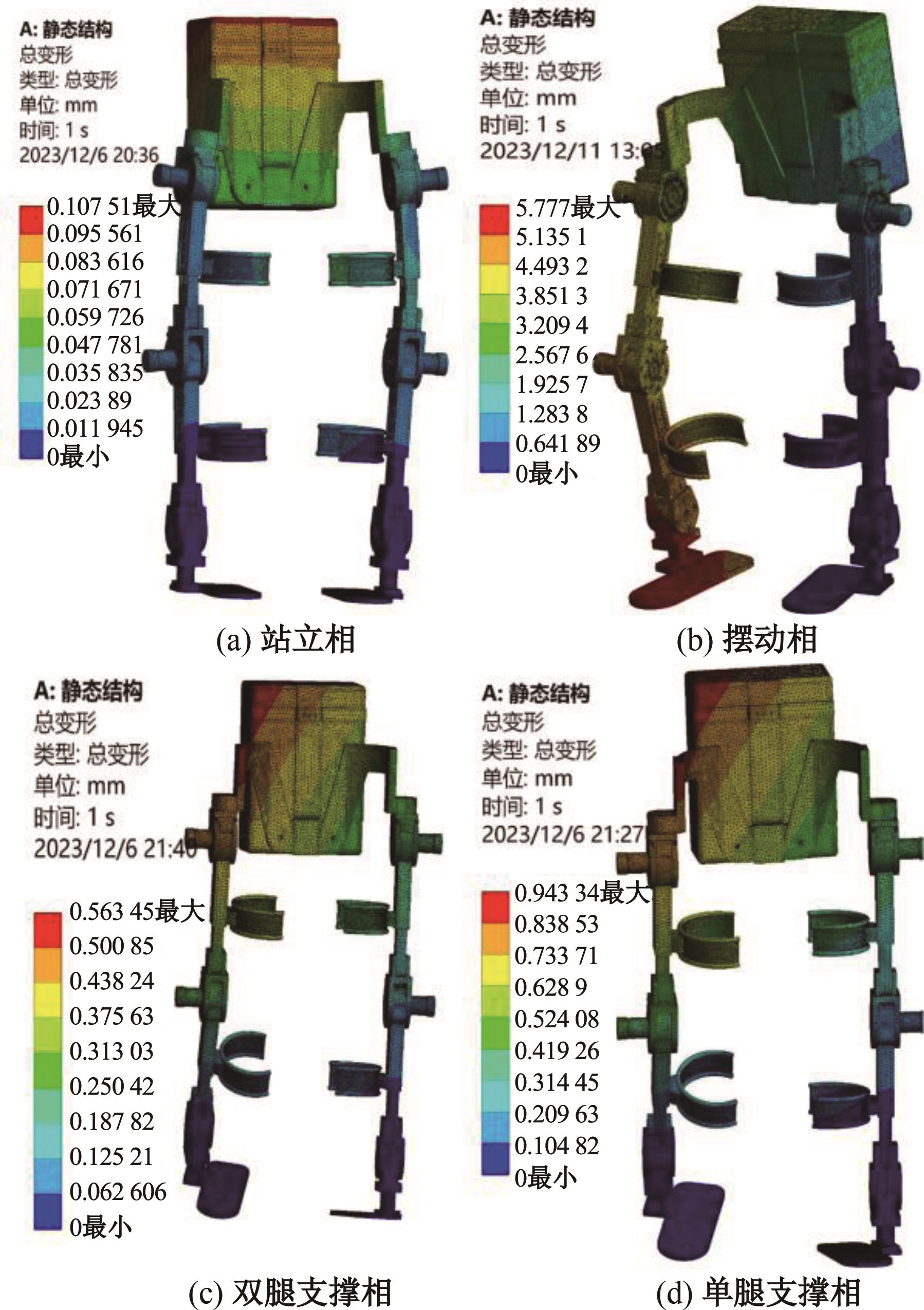
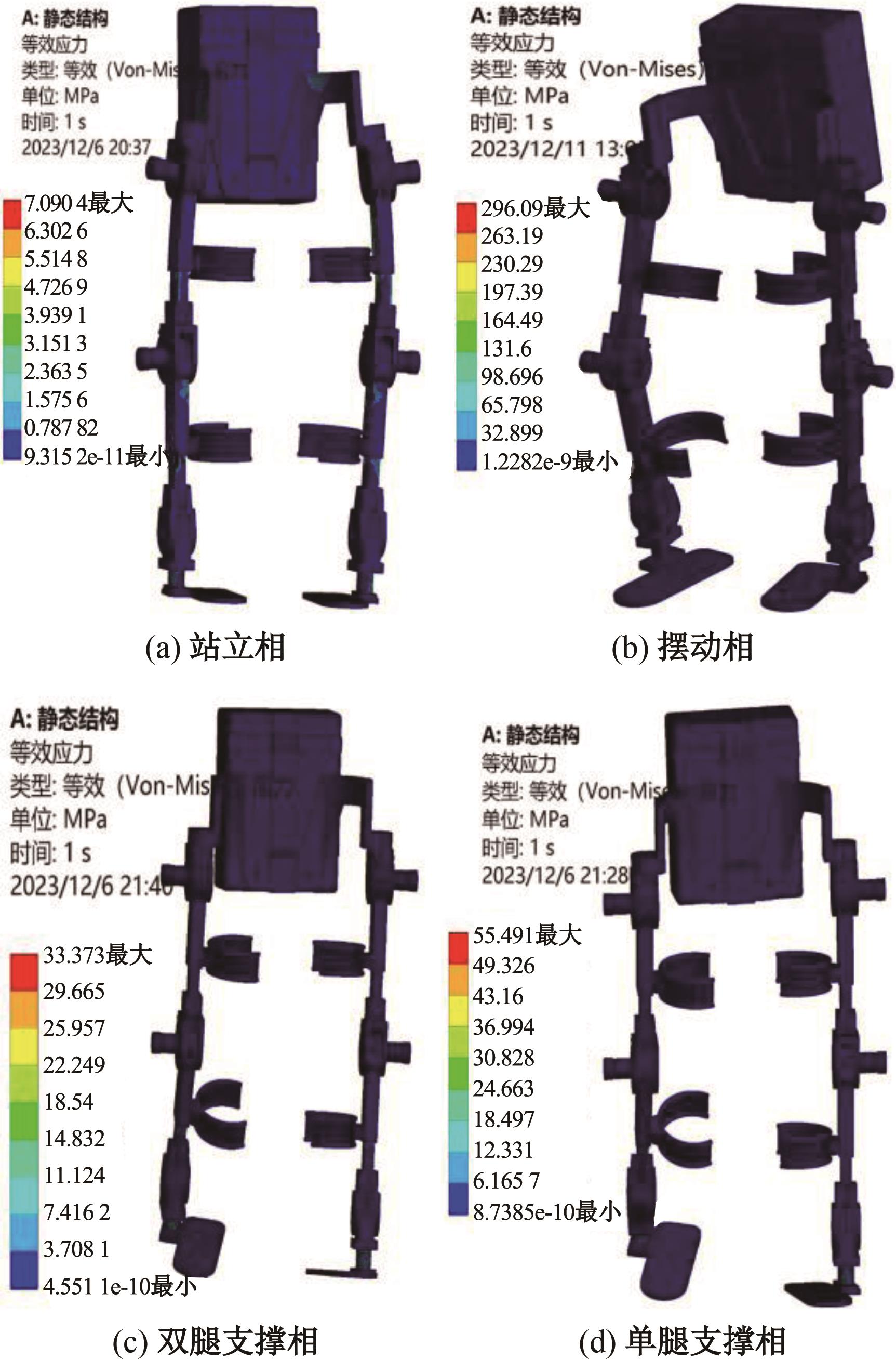
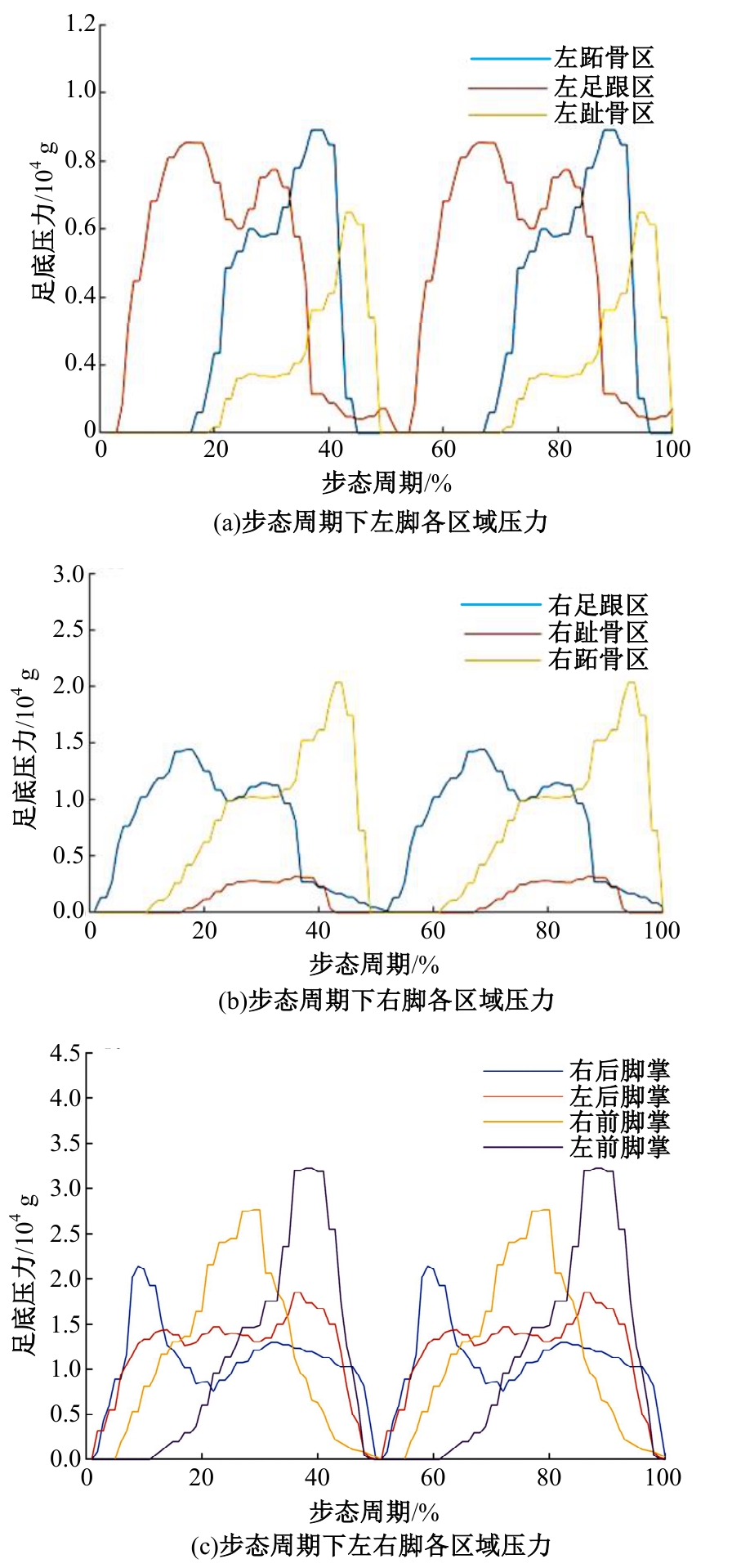
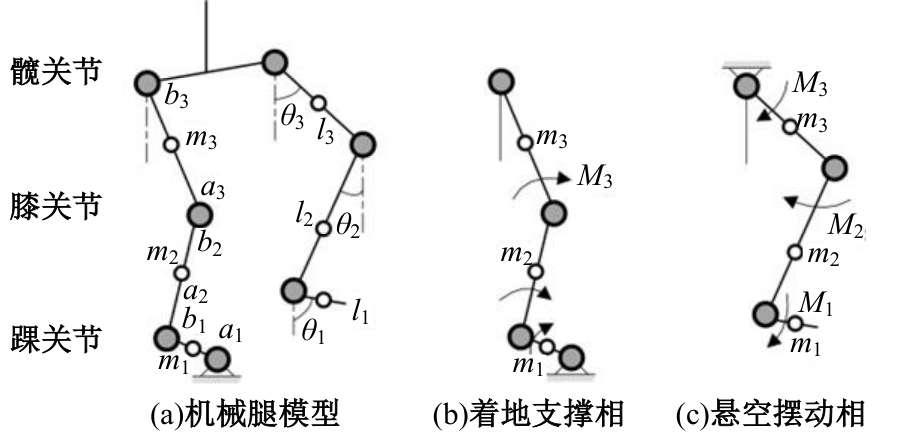
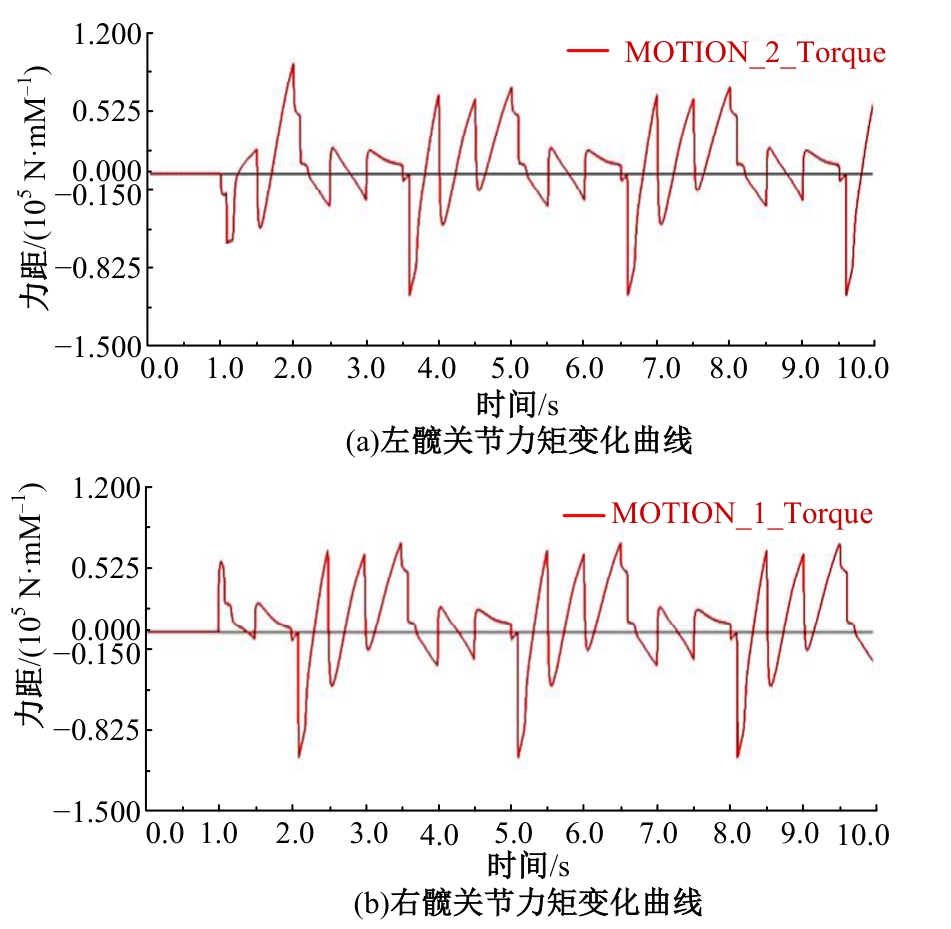
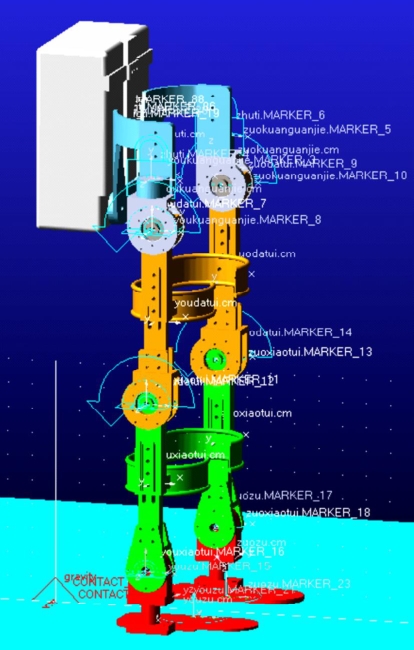
针对当前下肢外骨骼结构冗余及人机匹配性差的问题,设计了一种多自由度尺寸可调的下肢助力外骨骼机器人,并在关节处设置了限位装置;采用有限元方法模拟了外骨骼结构在行走过程中的受力、变形、应力和共振情况;利用足底压力传感器系统采集和分析了人体足底的受力及变化规律;采用拉格朗日方程建立了外骨骼关节机械腿的动力学模型,并求解了各关节的受力情况;将实验和求解结果作为关节驱动函数的参数,对外骨骼进行动力学仿真,获得了外骨骼运动的样条数据。所得结果为后续机器人的驱动控制提供了依据,同时验证了下肢助力外骨骼机器人的人机协调性和合理性。
中图分类号:
- TP242




| [1] | 宋遒志, 王晓光, 王鑫, 等. 多关节外骨骼助力机器人发展现状及关键技术分析[J]. 兵工学报, 2016, 37(1): 172-185. |
| Song Qiu-zhi, Wang Xiao-guang, Wang Xin, et al. Development of multi-joint exoskeleton-assisted robot and its key technology analysis: an overview[J]. Acta Armamentarii, 2016, 37(1): 172-185. | |
| [2] | Kalita B, Narayan J, Dwivedy S K. Development of active lower limb robotic-based orthosis and exoskeleton devices: a systematic review[J]. International Journal of Social Robotics, 2021, 13: 775-793. |
| [3] | Pamungkas D S, Caesarendra W, Soebakti H, et al. Overview: types of lower limb exoskeletons[J]. Electronics, 2019, 8(11): No.1283. |
| [4] | 朱惠盈, 杨海乐, 林星羽. 外骨骼穿戴式助力助行机器人技术综述[J]. 计量与测试技术, 2019, 46(7): 54-58, 63. |
| Zhu Hui-ying, Yang Hai-le, Lin Xing-yu. Review of exoskeleton wearable assisting robot[J]. Metrology & Measurement Technique, 2019, 46(7): 54-58, 63. | |
| [5] | 何育民, 骆婷, 郭思宇, 等. 下肢外骨骼运动学与动力学研究综述[J]. 兵器装备工程学报, 2023, 44(5): 285-293. |
| He Yu-min, Luo Ting, Guo Si-yu, et al. Research review on kinematics and dynamics of lower limb exoskeleton[J]. Journal of Ordnance Equipment Engineering, 2023, 44(5): 285-293. | |
| [6] | Young A J, Ferris D P. State of the art and future directions for lower limb robotic exoskeletons[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 25(2): 171-182. |
| [7] | Mohammed S, Amirat Y, Rifai H. Lower-limb movement assistance through wearable robots: State of the art and challenges[J]. Advanced Robotics, 2012, 26(1/2): 1-22. |
| [8] | Kazerooni H, Steger R. The Berkeley lower extremity exoskeleton[J]. Journal of Dynamic Systems, Measurement, and Control, 2006, 128(1): 14-25. |
| [9] | Qin T, Yang Y, Wen B, et al. Research on human gait prediction and recognition algorithm of lower limb-assisted exoskeleton robot[J]. Intelligent Service Robotics, 2021, 14(3): 445-457. |
| [10] | 尹军茂. 穿戴式下肢外骨骼机构分析与设计[D]. 北京: 北京工业大学机械工程与应用电子技术学院, 2010. |
| Yin Jun-mao. Analysis and design of wearable lower extremity exoskeleton[D]. Beijing: College of Mechanical Engineering and Applied Electronics Technology, Beijing University of Technology, 2010. | |
| [11] | 贾山. 下肢外骨骼的动力学分析与运动规划[D]. 南京: 东南大学机械工程学院, 2016. |
| Jia Shan. Dynamics and motion planning of lower extremity exoskeleton[D]. Nanjing: School of Mechanical Engeering, Southeast University, 2016. | |
| [12] | 张超. 下肢助力外骨骼机器人研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2016. |
| Zhang Chao. Research on lower limbs powered exoskeletonrobot[D]. Harbin: School of Mechanical and Electrical Engineering, Harbin Institute of Technology, 2016. | |
| [13] | 衣淳植, 郭浩, 丁振, 等. 下肢外骨骼研究进展及关节运动学解算综述[J]. 智能系统学报, 2018, 13(6): 878-888. |
| Yi Chun-zhi, Guo Hao, Ding Zhen, et al. Research progress of lower-limb exoskeleton and joint kinematics calculation[J]. CAAI Transactions on Intelligent Systems, 2018, 13(6): 878-888. | |
| [14] | Baser O, Kizilhan H, Kilic E. Employing variable impedance (stiffness/damping) hybrid actuators on lower limb exoskeleton robots for stable and safe walking trajectory tracking[J]. Journal of Mechanical Science and Technology, 2020, 34: 2597-2607. |
| [15] | Zheng Y, Wang Y Q, Liu J X. Analysis and experimental research on stability characteristics of squatting posture of wearable lower limb exoskeleton robot[J]. Future Generation Computer Systems, 2021, 125: 352-363. |
| [16] | 汪步云, 王月朋, 梁艺, 等. 下肢外骨骼助力机器人关节驱动设计及试验分析[J]. 机械工程学报, 2019,55(23): 55-66. |
| Wang Bu-yun, Wang Yue-peng, Liang Yi, et al. Design on articular motion & servo driving with experimental analysis for lower limb exoskeleton robot[J]. Journal of Mechanical Engineering, 2019, 55(23): 55-66. | |
| [17] | 宋纪元, 朱爱斌, 屠尧, 等. 人机交互力对下肢助力外骨骼关节期望角度的预测[J]. 西安交通大学学报, 2021, 55(12): 55-63, 69. |
| Song Ji-yuan, Zhu Ai-bin, Tu Yao, et al. Prediction of expected angle of joints of lower limb assisted exoskeleton with human-robot interaction[J]. Journal of Xi'an Jiaotong University, 2021, 55(12): 55-63, 69. | |
| [18] | 陈炜, 王立柱, 张林琰, 等. 下肢外骨骼康复机器人动力学分析与仿真[J]. 机械设计, 2018, 35(4): 71-77. |
| Chen Wei, Wang Li-zhu, Zhang Lin-yan, et al. Dynamic analysis and simulation for lower limb exoskeleton rehabilitation robot[J]. Journal of Machine Design, 2018, 35(4): 71-77. | |
| [19] | 陈树洋. 下肢外骨骼助力机器人结构设计与仿真分析[D]. 镇江: 江苏大学机械工程学院, 2018. |
| Chen Shu-yang. Structure design and simulation analysis of lower-limb exoskeletonassisted robot[D]. Zhenjiang: School of Mechanical Engineering, Jiangsu University, 2018. | |
| [20] | Dadi V V, Sathwik P, Mahesh D, et al. Structural design and analysis of a lower limb exoskeleton for elderly[J]. International Journal of Advanced Mechatronic Systems, 2020, 8(2/3): 65-74. |
| [21] | Li J F, Zhang Z Q, Tao C J, et al. Structure design of lower limb exoskeletons for gait training[J]. Chinese Journal of Mechanical Engineering, 2015, 28(5): 878-887. |
| [22] | 陈伟, 王勇, 沈进东, 等. 基于气囊结构鞋垫的足底压力分布测量系统[J]. 重庆理工大学学报: 自然科学, 2023, 37(10): 202-210. |
| Chen Wei, Wang Yong, Shen Jin-dong, et al. Plantar pressure based on airbag insole distributedmeasurement system[J]. Journal of Chongqing University of Technology (Natural Science), 2023, 37(10): 202-210. | |
| [23] | Yan Y, Chen Z L, Huang C, et al. Modelling and analysis of coupling dynamics of swinging a lower limb exoskeleton[J]. Nonlinear Dynamics, 2023, 111(2): 1213-1234. |
| [24] | 张燕, 李梵茹, 李威, 等. 基于人机耦合的下肢外骨骼动力学分析及仿真[J]. 应用数学和力学, 2019, 40(7): 780-790. |
| Zhang Yan, Li Fan-ru, Li Wei, et al. Dynamic analysis and simulation of the lower extremity exoskeleton based on human-machine interaction[J]. Applied Mathematics and Mechanics, 2019, 40(7): 780-790. | |
| [25] | 张淑珍, 周瑞, 毕彦峰, 等. 下肢外骨骼机器人踝关节建模及动力学仿真[J]. 机械科学与技术, 2020, 39(5): 695-700. |
| Zhang Shu-zhen, Zhou Rui, Bi Yan-feng, et al. Ankle joint modeling and dynamics simulation of wearable lower limb exoskeleton robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(5): 695-700. | |
| [26] | 陈贵亮, 李子浩, 蔡超, 等. 基于人体动力学分析的下肢外骨骼助力设计及机构优化[J]. 工程设计学报, 2023, 30(3): 362-371. |
| Chen Gui-liang, Li Zi-hao, Cai Chao, et al. Design and mechanism optimization of lower limb exoskeleton based on human dynamics analysis[J]. Chinese Journal of Engineering Design, 2023, 30(3): 362-371. |
| [1] | 贾志成,金敬福,董新桔,韩丰地,江晟,齐迎春,邹猛. 基于单轮试验的高速星球车动力学仿真保真度优化[J]. 吉林大学学报(工学版), 2025, 55(9): 2874-2882. |
| [2] | 金敬福,董新桔,贾志成,王康,贺连彬,邹猛,齐迎春. 板簧式弹性金属车轮胎面弹片结构优化[J]. 吉林大学学报(工学版), 2023, 53(4): 964-972. |
| [3] | 邓海,王超,杨京浩,王利忠,王明辉,李志刚. 碳纤维增强热塑性复合材料研究进展[J]. 吉林大学学报(工学版), 2023, 53(1): 18-30. |
| [4] | 于征磊,信仁龙,陈立新,朱奕凝,张志辉,曹青,金敬福,赵杰亮. 仿蜂窝防护结构的承载特性[J]. 吉林大学学报(工学版), 2021, 51(3): 1140-1145. |
| [5] | 张君媛, 纪梦雪, 王楠, 叶威. 汽车正面25%重叠率碰撞车身前端结构设计[J]. 吉林大学学报(工学版), 2018, 48(1): 57-64. |
| [6] | 刘坤, 赵建琛, 李超, 闫鹏飞, 韩宣. 基于Hyperworks的下肢康复训练系统机械结构设计与优化[J]. 吉林大学学报(工学版), 2015, 45(5): 1474-1480. |
| [7] | 何仁, 王晶, 胡东海. 永磁式缓速器的制动力矩分级结构设计[J]. 吉林大学学报(工学版), 2015, 45(4): 1056-1062. |
| [8] | 钱志辉, 苗怀彬, 商震, 任露泉. 基于多种步态的德国牧羊犬足-地接触分析[J]. 吉林大学学报(工学版), 2014, 44(6): 1692-1697. |
| [9] | 贾树强, 尚涛, 王昕, 宫文斌, 李琪, 金松哲. 新型摆动式球磨机运动机理及性能[J]. 吉林大学学报(工学版), 2012, 42(增刊1): 71-76. |
| [10] | 王庆年, 刘松山, 王伟华, 魏昊. 滚珠丝杠式馈能型减振器的结构设计及参数匹配[J]. , 2012, 42(05): 1100-1106. |
| [11] | 郑黎明,杨慎华,邓春萍. 裂解连杆夹钳机构动力学仿真及试验[J]. 吉林大学学报(工学版), 2010, 40(03): 714-0719. |
| [12] | 郭孔辉,金凌鸽,卢荡. 统一轮胎模型在车辆动力学仿真中的应用[J]. 吉林大学学报(工学版), 2009, 39(增刊2): 241-0245. |
| [13] | 靳立强,王庆年,周雪虎,宋传学 . 电动轮驱动汽车电子差速控制策略及仿真[J]. 吉林大学学报(工学版), 2008, 38(增刊): 1-0006. |
| [14] | 谢哲东,赵继,张雷 . 微小研抛机器人动力学仿真分析与运动实验[J]. 吉林大学学报(工学版), 2008, 38(02): 349-0353. |
| [15] | 靳立强,王庆年,宋传学 . 电动轮驱动汽车动力学仿真模型及试验验证[J]. 吉林大学学报(工学版), 2007, 37(04): 745-750. |
|
||