吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (2): 437-444.doi: 10.13229/j.cnki.jdxbgxb20190766
• 车辆工程·机械工程 • 上一篇
基于克里金和粒子群算法的装载机铲掘轨迹规划
于向军1( ),槐元辉2,李学飞3,王德武1,俞安1()
),槐元辉2,李学飞3,王德武1,俞安1()
- 1.昆明学院 机电工程学院,昆明 650214
2.昆明市机动车检验监管服务中心,昆明 650200
3.吉林大学 机械与航空航天工程学院,长春 130022
Shoveling trajectory planning method for wheel loader based on kriging and particle swarm optimization
Xiang-jun YU1(),Yuan-hui HUAI2,Xue-fei LI3,De-wu WANG1,An YU1()
- 1.School of Mechanical and Electrical Engineering, Kunming University, Kunming 650214, China
2.Kunming Motor Vehicle Inspection and Supervision Service Center, Kunming 650200, China
3.School of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China
摘要:
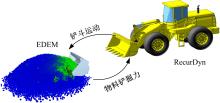
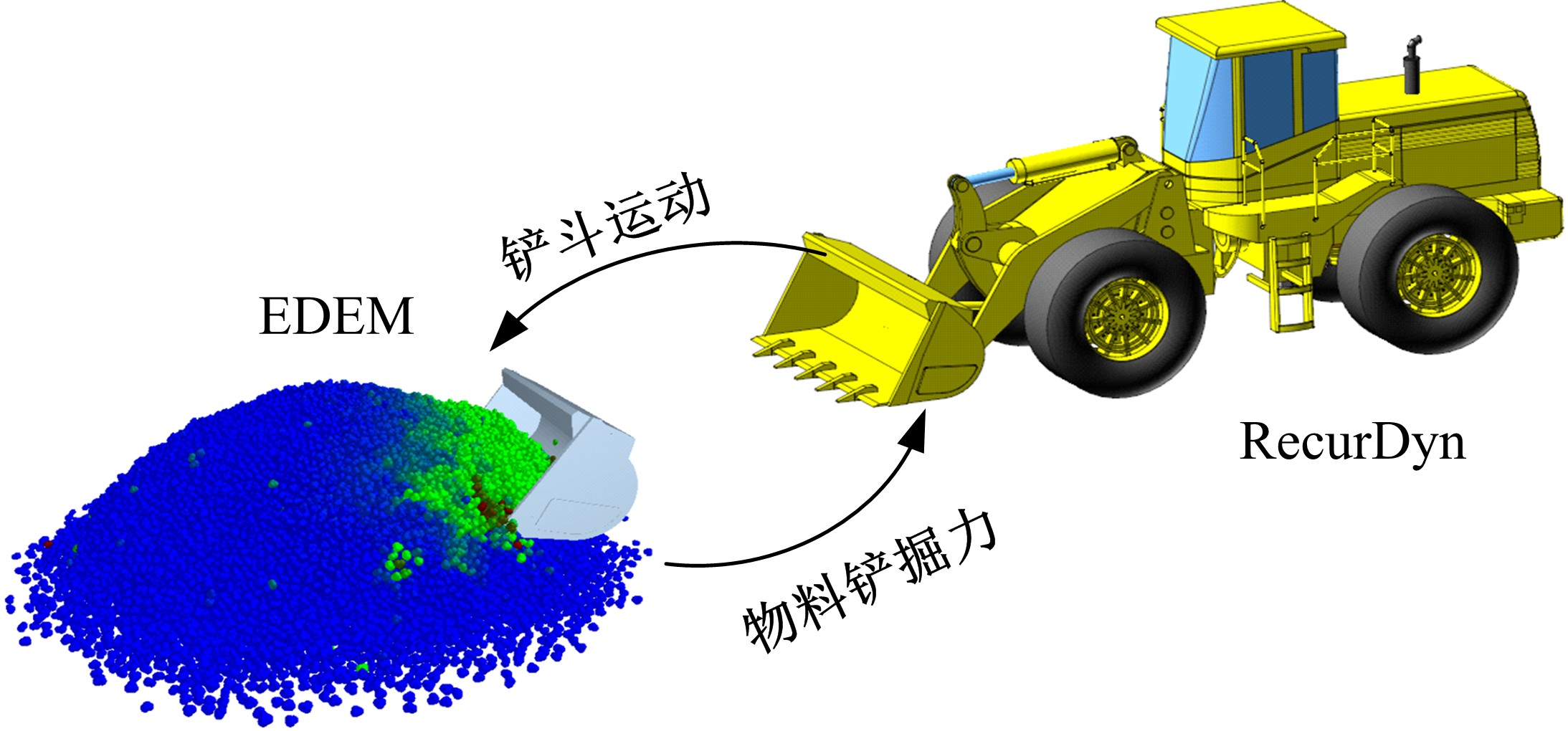
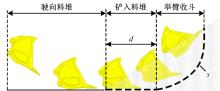
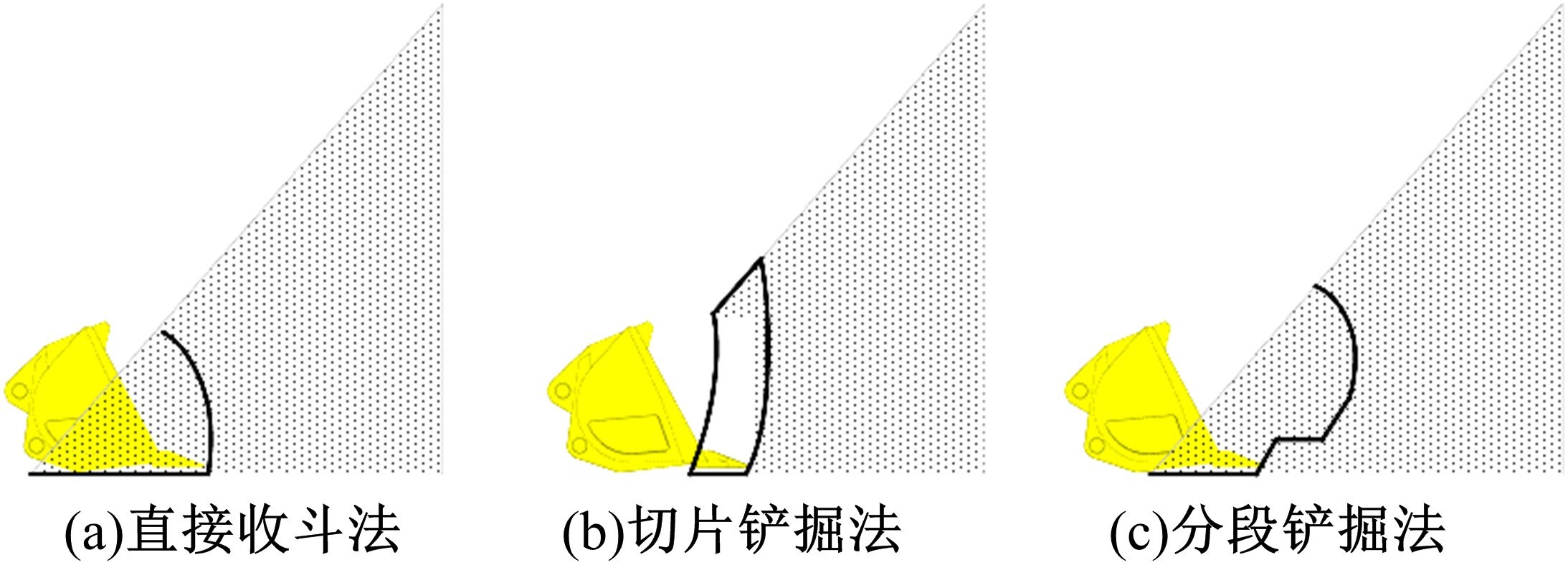
以某50型轮式装载机为研究对象,结合其行驶、作业特性和自身结构特点,联合RecurDyn和EDEM建立了包含物料信息的装载机铲掘特性仿真模型。归纳驾驶员经验分析了装载机铲掘散状物料的过程,构建了能反映铲斗满斗率和燃油消耗量综合性能的装载机铲掘性能指标。针对不同工况和不同铲掘轨迹参数下的装载机铲掘性能,基于Kriging方法建立了不同工况下铲掘性能关于铲掘轨迹参数的近似响应关系,采用粒子群算法对其进行优化,得到了不同工况下的理论铲掘轨迹参数。分析结果表明:优化后的铲掘轨迹参数所对应的装载机铲掘性能将会得到明显提升。
中图分类号:
- TH243











| 1 | Filla R. Evaluating the efficiency of wheel loader bucket designs and bucket filling strategies with non-coupled DEM simulations and simple performance indicators[C]∥Fachtagung Baumaschinentechnik, Dresden, Germany, September, 2015: 16-17. |
| 2 | Frank B, Kleinert J, Filla R. Optimal control of wheel loader actuators in gravel applications[J]. Automation in Construction, 2018, 91: 1-14. |
| 3 | 龚捷,崔玉鑫. 装载机铲掘作业的轨迹规划[J]. 机械工程学报, 2009, 45(7): 29-34. |
| Gong Jie, Cui Yu-xin. Track planning for a wheel loader in a digging [J]. Journal of Mechanical Engineering, 2009, 45(7): 29-34. | |
| 4 | 赵腾云,秦四成,曾庆强,等. 轮式装载机铲斗铲掘与路径轨迹研究[J]. 建筑机械, 2011(3): 80-82. |
| Zhao Teng-yun, Qin Si-cheng, Zeng Qing-qiang, et al. Research of bucket digging and path trajectory of wheel loader [J]. Construction Machinery, 2011(3): 80-82. | |
| 5 | 宁俏俏. 装载机铲掘作业轨迹的自适应控制仿真研究[D]. 长春: 吉林大学机械科学与工程学院, 2008. |
| Ning Qiao-qiao. Research on adaptive control of loaders in dingging[D]. Changchun: School of Mechanical Science and Engineering, Jilin University, 2008. | |
| 6 | 张大庆,何清华,郝鹏,等. 液压挖掘机铲斗轨迹跟踪的鲁棒控制[J]. 吉林大学学报: 工学版, 2006, 36(6): 934-938. |
| Zhang Da-qing, He Qing-hua, Hao Peng, et al. Robust trajectory tracking control of hydraulic excavator bucket[J]. Journal of Jilin University (Engineering and Technology Edition), 2006, 36(6): 934-938. | |
| 7 | 毕秋实,王国强,陈立军,等.基于离散元-多体动力学联合仿真的机械式挖掘机挖掘阻力仿真与试验[J]. 吉林大学学报: 工学版, 2019, 49(1): 106-116. |
| Bi Qiu-shi, Wang Guo-qiang, Chen Li-jun, et al. Numerical simulation and experiment on excavation resistance of mechanical excavator based on DEM-MBD co-simulation[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(1): 106-116. | |
| 8 | Alshaer B, Darabseh T, Alhanouti M. Path planning, modeling and simulation of an autonomous articulated heavy construction machine performing a loading cycle[J]. Applied Mathematical Modelling, 2013, 37: 5315-5325. |
| 9 | Engelbrecht A P. Particle swarm optimization with crossover: a review and empirical analysis[J]. Artificial Intelligence Review, 2016, 45(2): 131-165. |
| [1] | 金顺福,郄修尘,武海星,霍占强. 基于新型休眠模式的云虚拟机分簇调度策略及性能优化[J]. 吉林大学学报(工学版), 2020, 50(1): 237-246. |
| [2] | 马芳武,倪利伟,吴量,聂家弘,徐广健. 轮腿式全地形移动机器人位姿闭环控制[J]. 吉林大学学报(工学版), 2019, 49(6): 1745-1755. |
| [3] | 王宏志,姜方达,周明月. 基于遗传粒子群优化算法的认知无线电系统功率分配[J]. 吉林大学学报(工学版), 2019, 49(4): 1363-1368. |
| [4] | 刘元宁,刘帅,朱晓冬,霍光,丁通,张阔,姜雪,郭书君,张齐贤. 基于决策粒子群优化与稳定纹理的虹膜二次识别[J]. 吉林大学学报(工学版), 2019, 49(4): 1329-1338. |
| [5] | 徐开,陈志刚,赵靖华,戴路,李峰. 基于粒子群算法的星敏感器布局设计[J]. 吉林大学学报(工学版), 2019, 49(3): 972-978. |
| [6] | 赵东,孙明玉,朱金龙,于繁华,刘光洁,陈慧灵. 结合粒子群和单纯形的改进飞蛾优化算法[J]. 吉林大学学报(工学版), 2018, 48(6): 1867-1872. |
| [7] | 刘元宁, 刘帅, 朱晓冬, 陈一浩, 郑少阁, 沈椿壮. 基于高斯拉普拉斯算子与自适应优化伽柏滤波的虹膜识别[J]. 吉林大学学报(工学版), 2018, 48(5): 1606-1613. |
| [8] | 黄辉, 冯西安, 魏燕, 许驰, 陈慧灵. 基于增强核极限学习机的专业选择智能系统[J]. 吉林大学学报(工学版), 2018, 48(4): 1224-1230. |
| [9] | 胡满江, 罗禹贡, 陈龙, 李克强. 基于纵向频响特性的整车质量估计[J]. 吉林大学学报(工学版), 2018, 48(4): 977-983. |
| [10] | 靳立强, 孙志祥, 郑迎. 电动轮汽车复合再生制动系统防抱协调控制[J]. 吉林大学学报(工学版), 2017, 47(5): 1344-1351. |
| [11] | 刘颖, 张凯, 于向军. 基于代理模型的中空轴式大型静压轴承多目标优化[J]. 吉林大学学报(工学版), 2017, 47(4): 1130-1137. |
| [12] | 黄璇, 郭立红, 李姜, 于洋. 改进粒子群优化BP神经网络的目标威胁估计[J]. 吉林大学学报(工学版), 2017, 47(3): 996-1002. |
| [13] | 张家旭, 李静. 基于混合优化方法的UniTire轮胎模型参数辨识[J]. 吉林大学学报(工学版), 2017, 47(1): 15-20. |
| [14] | 卢英, 王慧琴, 秦立科. 高大空间建筑火灾精确定位方法[J]. 吉林大学学报(工学版), 2016, 46(6): 2067-2073. |
| [15] | 张钦国, 秦四成, 马润达, 杨立光, 郗元, 刘晋侨. 装载机工作装置液压系统热特性[J]. 吉林大学学报(工学版), 2016, 46(3): 811-817. |
|
||