吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (6): 1982-1989.doi: 10.13229/j.cnki.jdxbgxb20200600
• 车辆工程·机械工程 • 上一篇
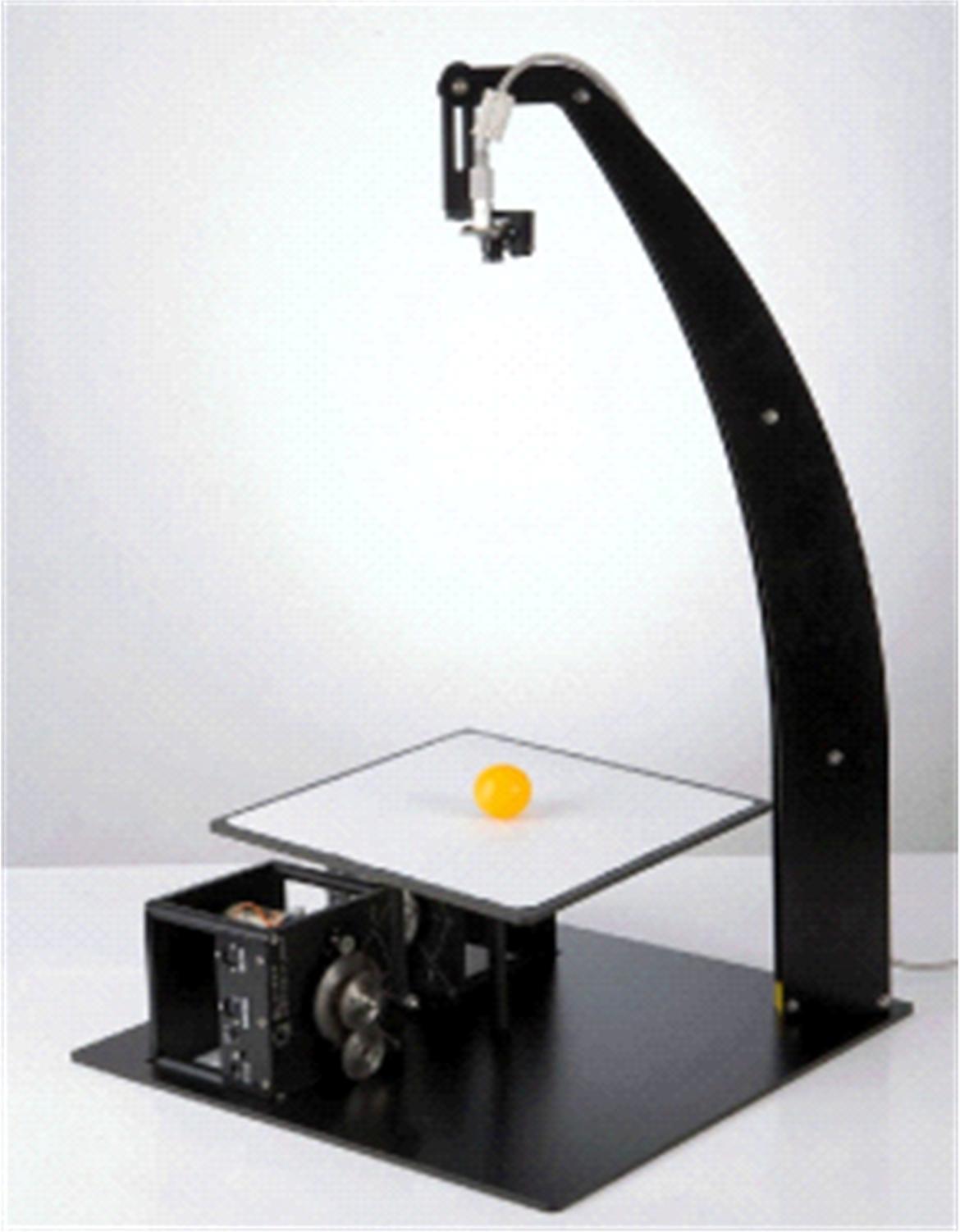
控制输入受限的板球系统滚动线性二次型调节器控制
韩光信1( ),赵聚乐2,胡云峰3
),赵聚乐2,胡云峰3
- 1.吉林化工学院 信息与控制工程学院,吉林省 吉林市 132022
2.东北电力大学 电气工程学院,吉林省 吉林市 132011
3.吉林大学 通信工程学院,长春 130022
Moving horizon linear quadratic regulator control for ball and plate system with input constraints
Guang-xin HAN1(),Ju-le ZHAO2,Yun-feng HU3
- 1.College of Information and Control Engineering,Jilin Institute of Chemical Technology,Jilin 132022,China
2.College of Electrical Engineering,Northeast Electric Power University,Jilin 132011,China
3.College of Communication Engineering,Jilin University,Changchun 130022,China
摘要:
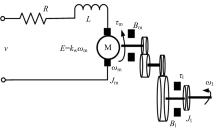
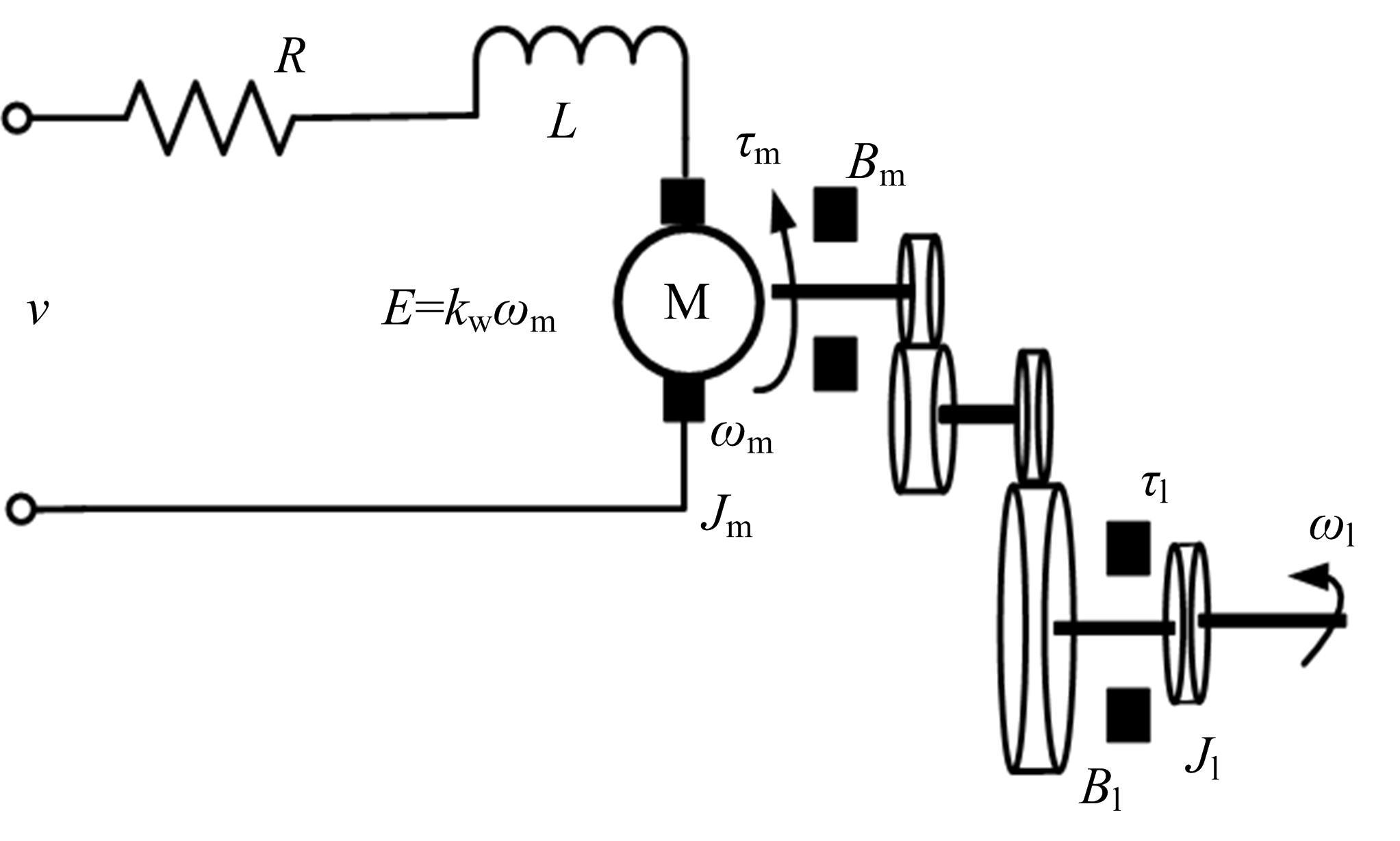
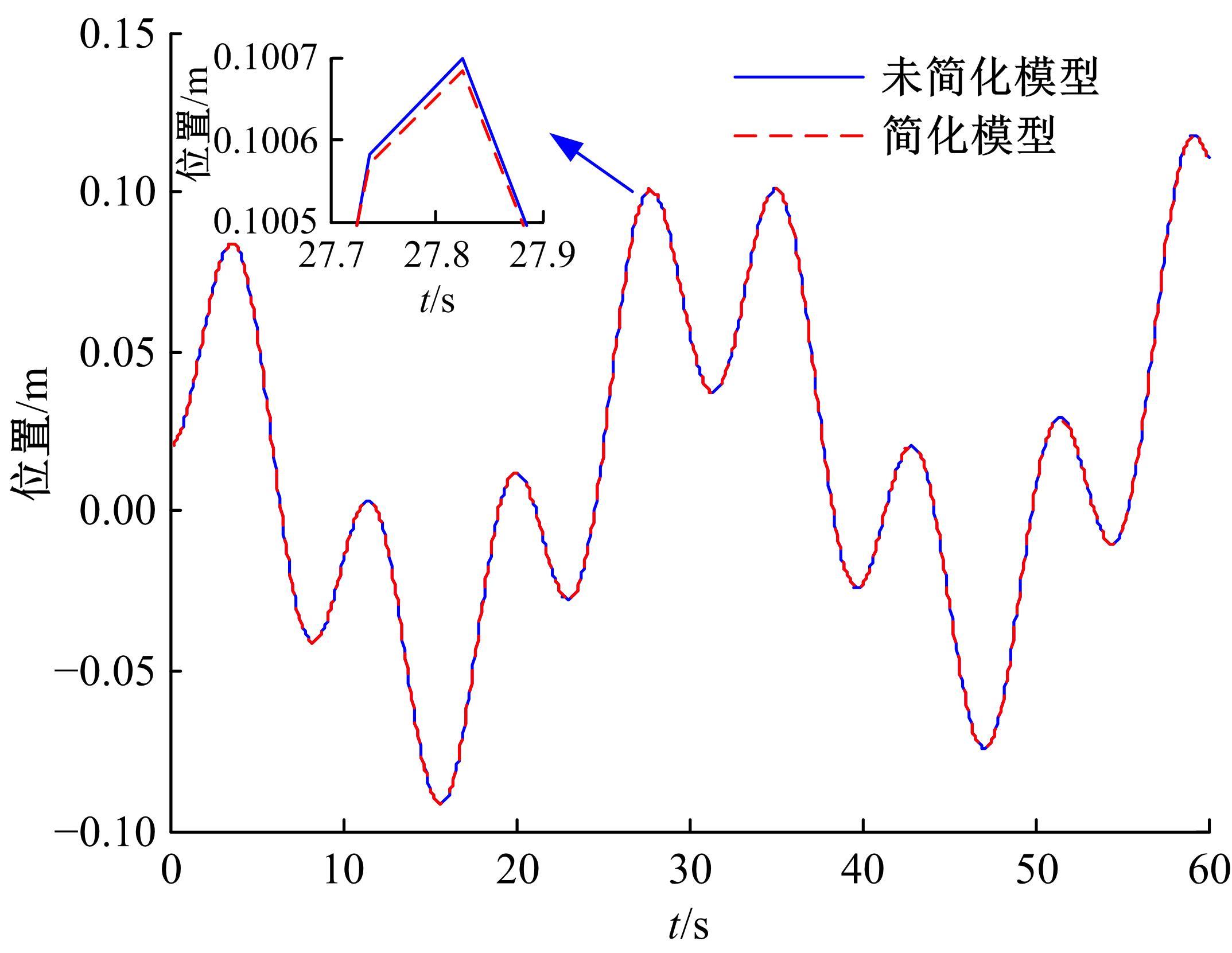
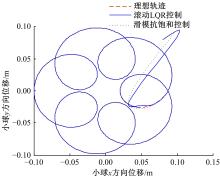
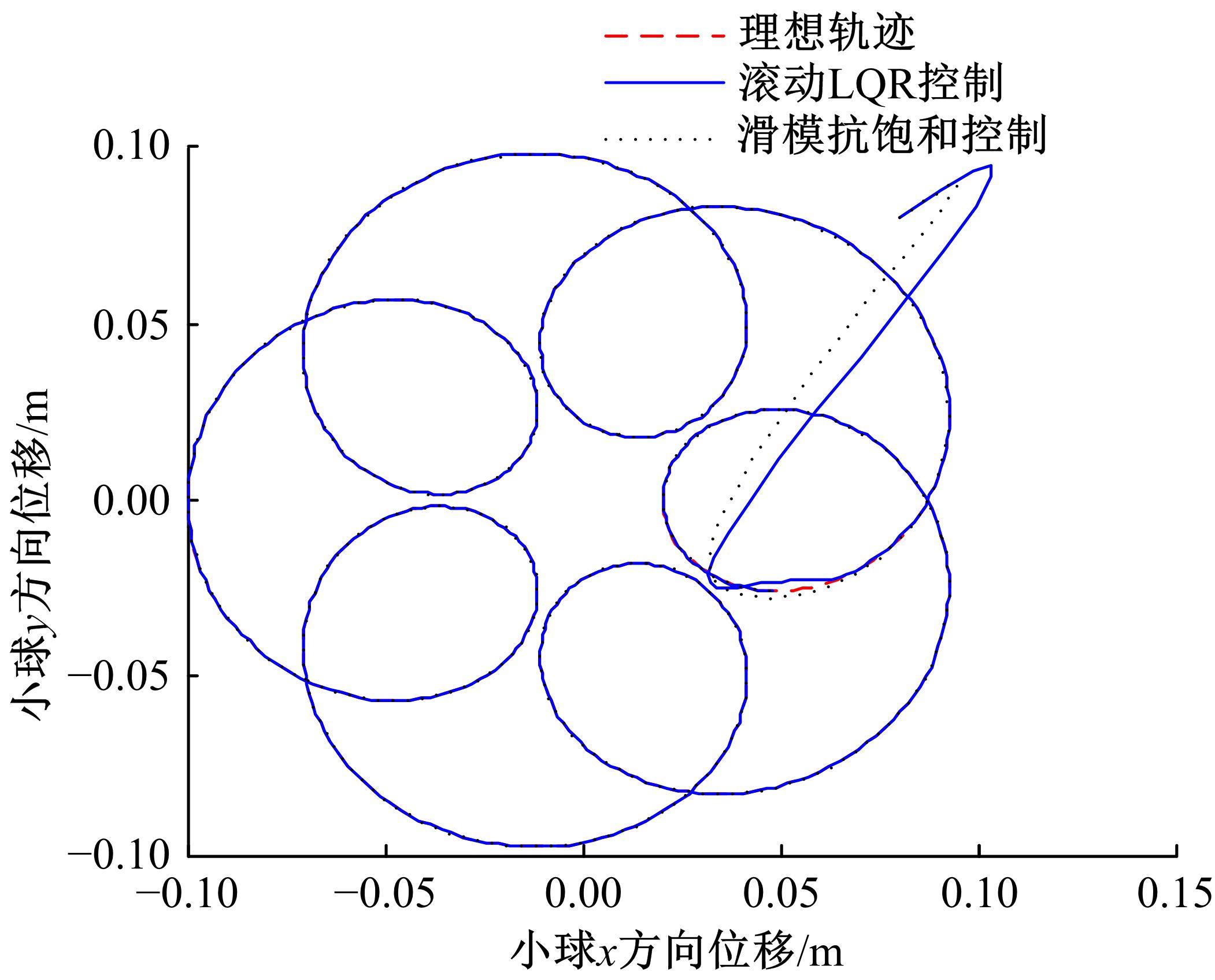
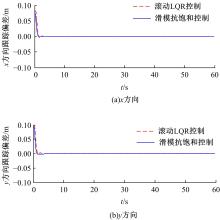
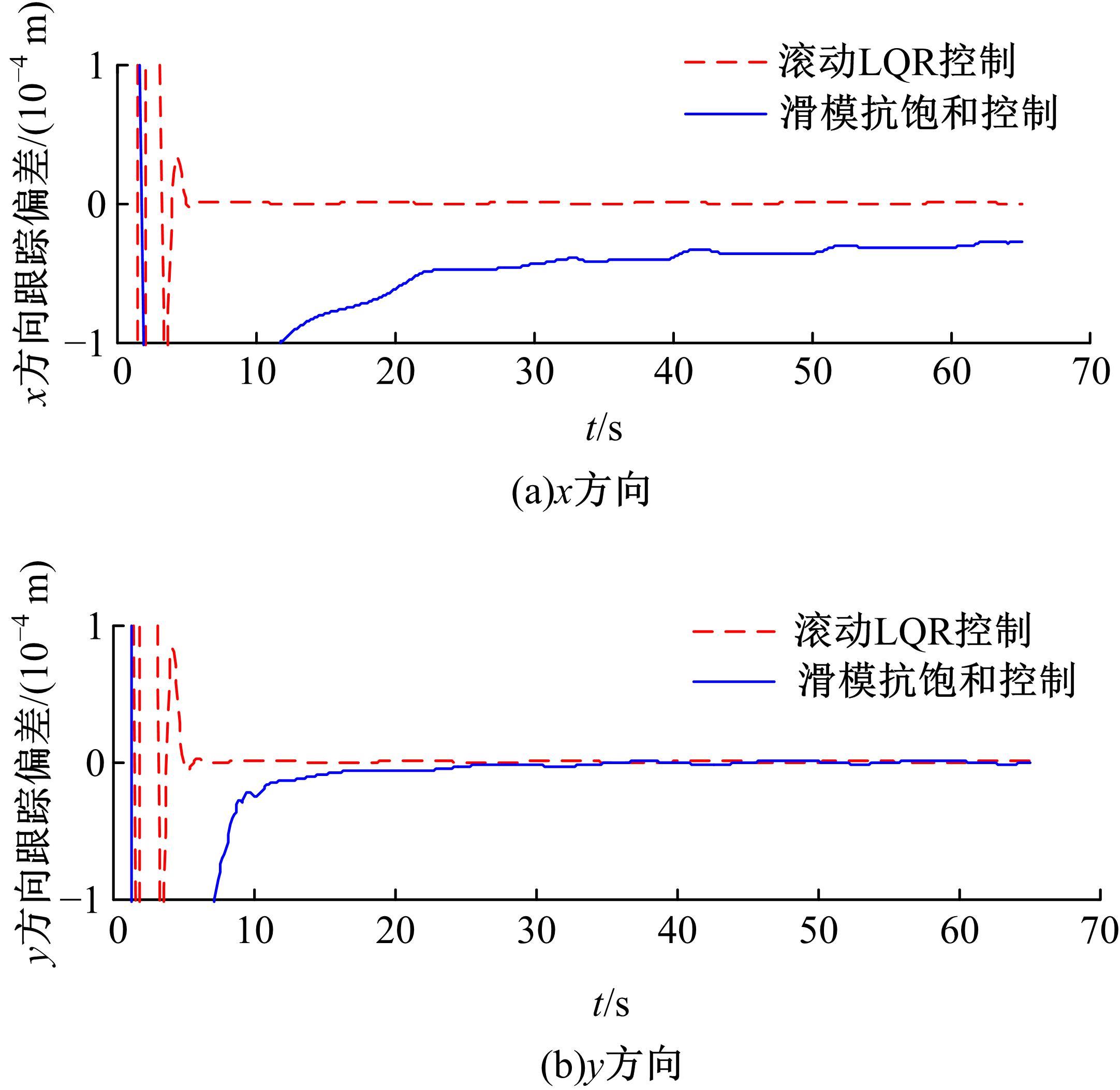
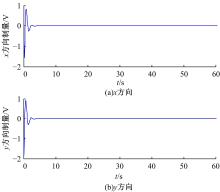
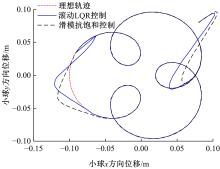
为了实现板球系统高精度的轨迹跟踪目标,首先根据目标轨迹,利用微分平坦技术得到前馈控制量和目标状态量。然后,基于目标状态建立偏差系统,结合预测控制中的滚动优化思想设计了滚动线性二次型(LQR)控制器。最后,考虑到被控对象输入受限的情况,在变椭圆域约束的条件下优化控制系统性能,并通过本地管理接口(LMI)求解出控制器。仿真结果显示,在输入受限的情况下,板球系统具有良好的轨迹跟踪性能、稳态性能和鲁棒性能。
中图分类号:
- TP273







| 1 | Huang Jiang-shuai, Wen Cang-yun, Wang Wei, et al. Global stable tracking control of underactuated ships with input saturation[J]. Systems & Control Letters, 2015, 85: 1-7. |
| 2 | Shojaei K.Neural adaptive robust control of underactuated marine surface vehicles with input saturation[J]. Applied Ocean Research, 2015, 53: 267-278. |
| 3 | 陈谋, 杨青运, 周砚龙, 等. 近空间飞行器鲁棒受限控制技术[M]. 北京:国防工业出版社,2017. |
| 4 | Wang Chen, Han Guang-xin. Variable structure PID control of four-tank system with input constaints[C]∥2018 International Conference on New Material and Intelligent Manufacturing, Jilin, China, 2018: 377-380. |
| 5 | 于树友, 常欢, 孟凌宇, 等. 基于扰动观测器的轮式移动机器人滚动时域路径跟踪控制[J]. 吉林大学学报: 工学版, 2021, 51(3):1097-1105. |
| Yu Shu-you, Chang Huan, Meng Ling-yu, et al. Disturbance observer based moving horizon control for path following problems of wheeled mobile robots[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(3): 1097-1105. | |
| 6 | Shaojaei K. Observer-based neural adaptive formation control of autonomous surface vessels with limited torque[J]. Robotics & Autonomous Systems, 2016, 78(C): 83-96. |
| 7 | Sun Ming-xiao, Luan Tian-tian, Liang Li-hua. RBF neural network compensation-based adaptive control for lift-feedback system of ship fin stabilizers to improve anti-rolling effect[J]. Ocean Engineering, 2018, 163(1): 307-321. |
| 8 | 孙丽颖, 王新, 白锐. 考虑输入约束的半主动悬架非线性自适应控制[J]. 控制与决策, 2018, 33(11): 2099-2103. |
| Sun Li-ying, Wang Xin, Bai Rui. Nonlinear adaptive control for semi-active suspension with input constraints[J]. Control and Decision, 2018, 33(11): 2099-2103. | |
| 9 | 韩光信, 胡云峰. 轮式机器人执行机构动态跟踪优化控制研究[J]. 计算机仿真, 2016, 33(12): 300-304. |
| Han Guang-xin, Hu Yun-feng. Study on actuator dynamics tracking optimization control of wheeled mobile robots[J]. Computer Simulation, 2016, 33(12): 300-304. | |
| 10 | 曹洋洋, 林意, 王智博, 等. 基于双曲正切函数约束的时间序列建模表示[J]. 计算机工程与应用, 2018, 54(18): 82-89. |
| Cao Yang-yang, Lin Yi, Wang Zhi-bo, et al. Time series modeling representation based on hyperbolic tangent function constraints[J]. Computer Engineering and Applications, 2018, 54(18):82-89. | |
| 11 | Chen Hao-lan, Zhou Jun, Zhou Min, et al. Nussbaum gain adaptive control scheme for moving mass reentry hypersonic vehicle with actuator saturation[J]. Aerospace Science and Technology, 2019, 91: 357-371. |
| 12 | Zhang Li-li, Chen Bing, Lin Chong. Adaptive neural consensus tracking control for a class of 2-order multi-agent systems with nonlinear dynamics[J]. Neurocomputing, 2020, 404: 84-92. |
| 13 | Koksal N, An H, Fidan B. Backstepping-based adaptive control of a quadrotor UAV with guaranteed tracking performance[J]. ISA Transactions, 2020, 105: 98-110. |
| 14 | 翟晨汐,李洪兴.板球系统的直接自适应模糊滑模控制[J]. 计算机仿真, 2016, 33(2): 383-388, 432. |
| Zhai Chen-xi, Li Hong-xing. Direct adaptive fuzzy sliding mode control for ball and plate system[J], Computer Simulation, 2016,33(2): 383-388, 432. | |
| 15 | 张英慧. 板球系统自适应控制算法与实验研究[D]. 长春:吉林大学通信工程学院, 2013. |
| Zhang Ying-hui. On the adaptive control algorithm and experimentation of ball and plate system[D]. Changchun:College of Communication, Jilin University, 2013. | |
| 16 | 韩京元, 田彦涛, 孔英秀, 等. 板球系统自适应解耦滑模控制[J]. 吉林大学学报:工学版, 2014, 44(3): 718-725. |
| Han Jing-yuan, Tian Yan-tao, Kong Ying-xiu, et al. Adaptive decoupled sliding mode control for the ball and plate system [J]. Journal of Jilin University (Engineering and Technology Edition), 2014, 44(3): 718-725. | |
| 17 | Didier H, Simone N, Mohab S E D. SPECTRA—a maple library for solving linear matrix inequalities in exact arithmetic[J]. Optimization Methods and Software, 2017, 34(1): 62-78. |
| 18 | 鲜永菊,扶坤荣,吴周青,等.一个新三维混沌系统及其自适应滑模同步控制[J].重庆邮电大学学报:自然科学版, 2020, 32(2): 278-286. |
| Xian Yong-ju, Fu Kun-rong, Wu Zhou-qing,et al. A new 3-D chaotic system and its adaptive sliding mode synchronization control[J]. JJournal of Chongqing University of Posts and Telecommunications(Natural Science Edition),2020, 32(2): 278-286. | |
| 19 | 曹伟,徐凤霞,张剑飞,等.网络控制系统中迭代学习控制算法的鲁棒收敛性分析[J].重庆邮电大学学报:自然科学版,2020,32(1):15-22. |
| Cao Wei, Xu Feng-xia, Zhang Jian-fei,et al. Robust convergence of iterative learning control for networked control systems[J]. Journal of Chongqing University of Posts and Telecommunications(Natural Science Edition), 2020, 32(1): 15-22. | |
| 20 | 刘志林, 张军, 原新. 复杂系统的应用鲁棒预测控制[M]. 北京:电子工业出版社,2017. |
| 21 | 赵聚乐, 韩光信. 基于粒子群优化的板球系统双闭环滑模控制[J]. 吉林化工学院学报, 2020, 37(1):63-67. |
| Zhao Ju-le, Han Guang-xin. Double closed loop sliding mode control of ball and plate system based on particle swarm optimization[J]. Journal of Jilin Institute of Chemical Technology, 2020, 37(1): 63-67. |
| [1] | 于树友,常欢,孟凌宇,郭洋,曲婷. 基于扰动观测器的轮式移动机器人滚动时域路径跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1097-1105. |
| [2] | 吴爱国,韩俊庆,董娜. 基于极局部模型的机械臂自适应滑模控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1905-1912. |
| [3] | 王伟,赵健廷,胡宽荣,郭永仓. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报(工学版), 2020, 50(2): 464-471. |
| [4] | 刘富,安毅,董博,李元春. 基于ADP的可重构机械臂能耗保代价分散最优控制[J]. 吉林大学学报(工学版), 2020, 50(1): 342-350. |
| [5] | 曲兴田,王学旭,孙慧超,张昆,闫龙威,王宏一. 熔融沉积成型技术3D打印机加热系统的模糊自适应PID控制[J]. 吉林大学学报(工学版), 2020, 50(1): 77-83. |
| [6] | 马常友, 高海波, 丁亮, 于海涛, 邢宏军, 邓宗全. 机器人末端执行器自更换机构设计及对接策略[J]. 吉林大学学报(工学版), 2019, 49(6): 2027-2037. |
| [7] | 马苗苗,潘军军,刘向杰. 含电动汽车的微电网模型预测负荷频率控制[J]. 吉林大学学报(工学版), 2019, 49(5): 1644-1652. |
| [8] | 于树友,谭雷,王伍洋,陈虹. 基于三步法的汽车主动四轮转向控制[J]. 吉林大学学报(工学版), 2019, 49(3): 934-942. |
| [9] | 温海营,任翔,徐卫良,丛明,秦文龙,胡书海. 咀嚼机器人颞下颌关节仿生设计及试验测试[J]. 吉林大学学报(工学版), 2019, 49(3): 943-952. |
| [10] | 顾万里,王萍,胡云峰,蔡硕,陈虹. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1811-1819. |
| [11] | 李战东,陶建国,罗阳,孙浩,丁亮,邓宗全. 核电水池推力附着机器人系统设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1820-1826. |
| [12] | 赵爽,沈继红,张刘,赵晗,陈柯帆. 微细电火花加工表面粗糙度快速高斯评定[J]. 吉林大学学报(工学版), 2018, 48(6): 1838-1843. |
| [13] | 王德军, 魏薇郦, 鲍亚新. 考虑侧风干扰的电子稳定控制系统执行器故障诊断[J]. 吉林大学学报(工学版), 2018, 48(5): 1548-1555. |
| [14] | 闫冬梅, 钟辉, 任丽莉, 王若琳, 李红梅. 具有区间时变时滞的线性系统稳定性分析[J]. 吉林大学学报(工学版), 2018, 48(5): 1556-1562. |
| [15] | 张茹斌, 占礼葵, 彭伟, 孙少明, 刘骏富, 任雷. 心肺功能评估训练系统的恒功率控制[J]. 吉林大学学报(工学版), 2018, 48(4): 1184-1190. |
|
||