吉林大学学报(工学版) ›› 2023, Vol. 53 ›› Issue (3): 629-642.doi: 10.13229/j.cnki.jdxbgxb20220610
• 综述 • 上一篇
基于新一代通信技术的无人机系统群体智能方法综述
潘弘洋1( ),刘昭1,杨波2,孙庚1(),刘衍珩1,2
),刘昭1,杨波2,孙庚1(),刘衍珩1,2
- 1.吉林大学 计算机科学与技术学院,长春 130012
2.长春财经学院 信息工程学院,长春 130122
Overview of swarm intelligence methods for unmanned aerial vehicle systems based on new⁃generation information technology
Hong-yang PAN1(),Zhao LIU1,Bo YANG2,Geng SUN1(),Yan-heng LIU1,2
- 1.College of Computer Science and Technology,Jilin University,Changchun 130012,China
2.College of Information and Engineering,Changchun University of Finance and Economics,Changchun 130122,China
摘要:
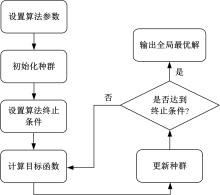
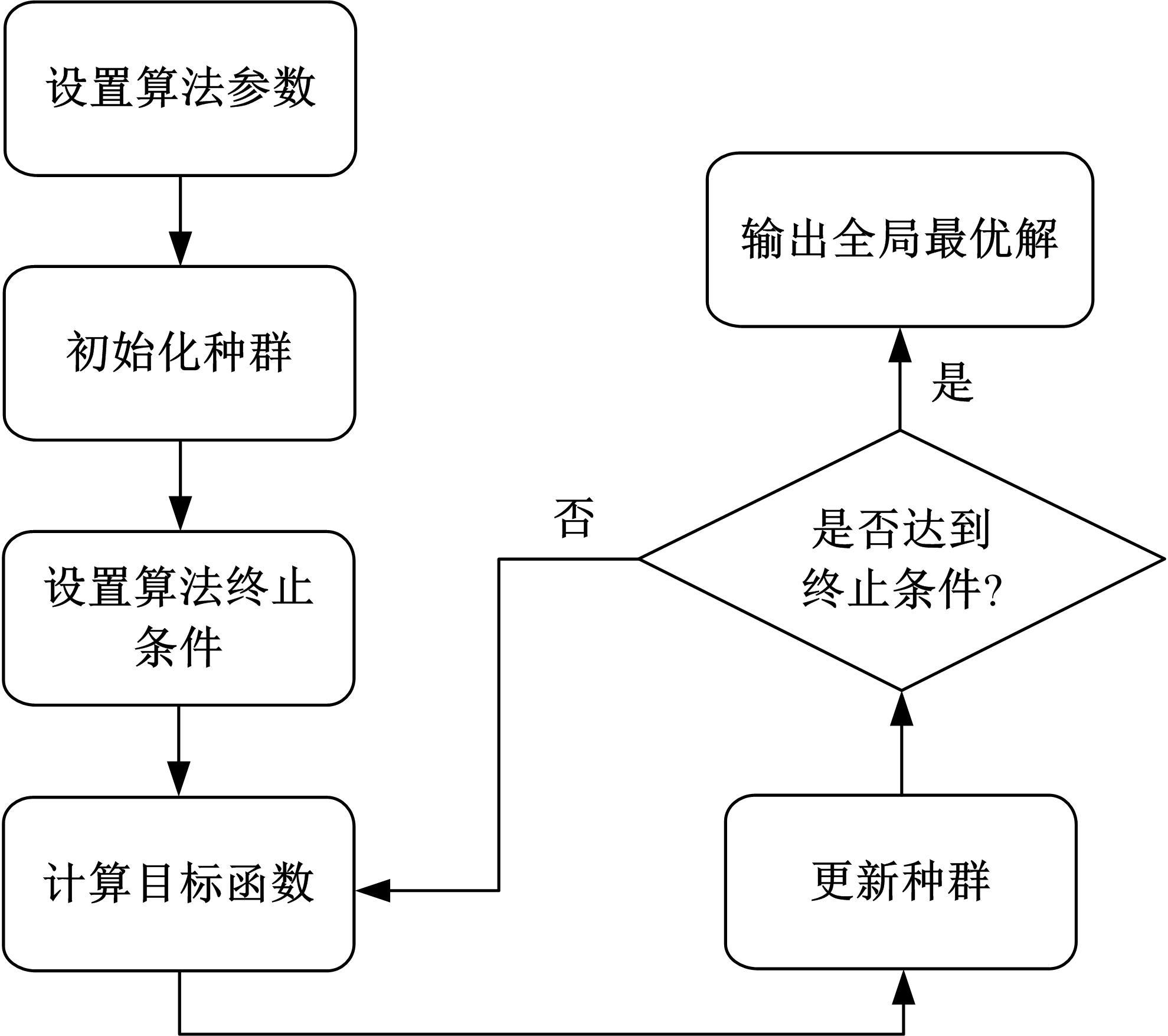
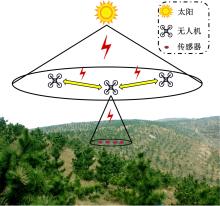
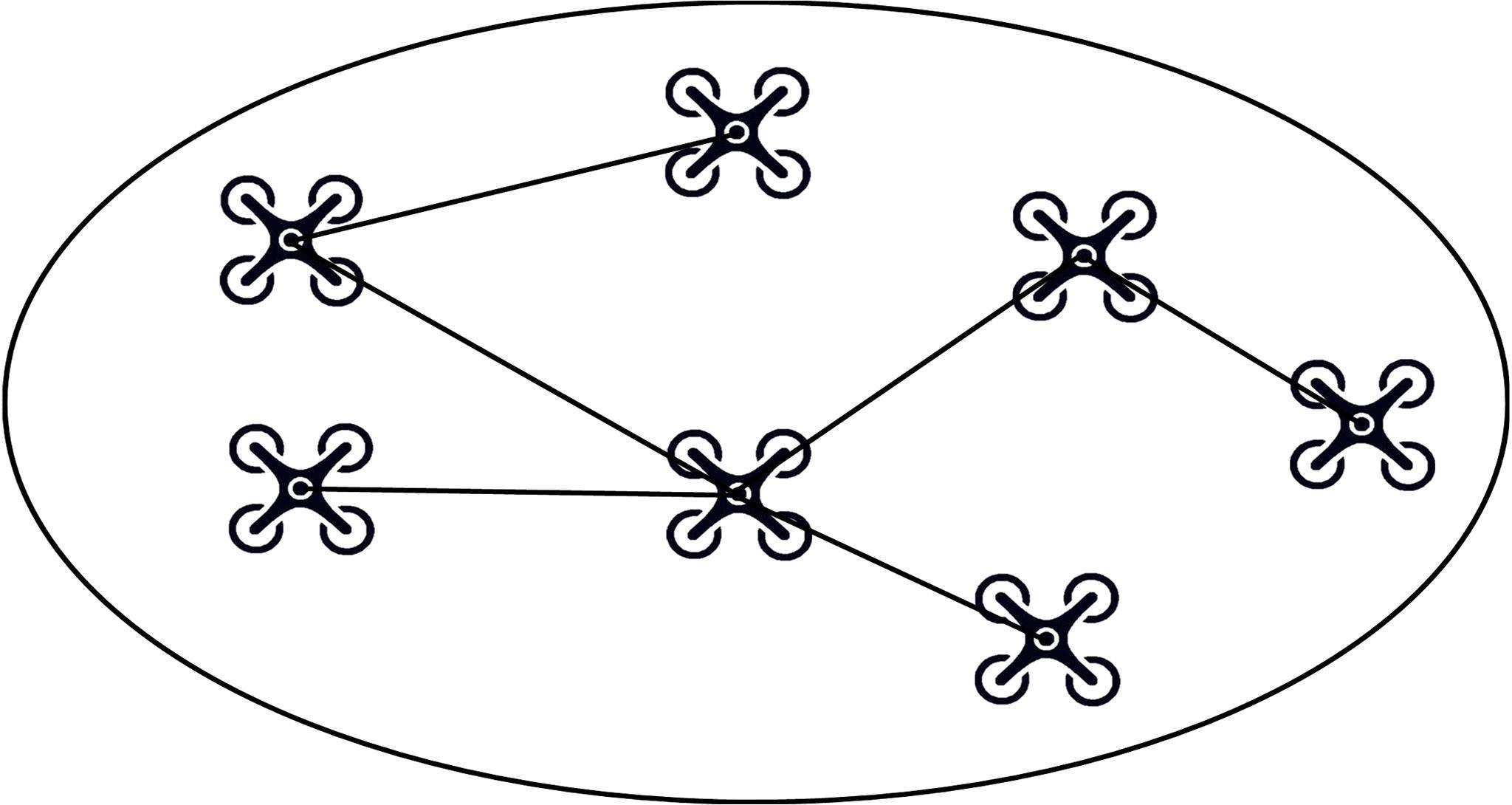
以群体智能在无人机领域的应用场景为脉络,对群体智能方法在无人机领域的应用进行综述。首先,回顾近年来无人机的应用状况,介绍了群体智能算法原理及无人机应用示例。其次,将群体智能在无人机的应用场景分为基于群体智能的无人机无线通信、基于群体智能的无人机自组网、基于群体智能的无人机轨迹规划和基于群体智能的无人机智能决策4个部分,并分别介绍了各自相关研究工作的进展。最后,对无人机群体智能的发展趋势进行简要探讨。
中图分类号:
- TP393


| 1 | IMT-2030(6G)推进组正式发布《6G总体愿景与潜在关键技术》白皮书[J]. 互联网天地,2021(6):8-9. |
| None Imt-2030 (6G) promotion group officially released the white paper "6G overall vision and potential key technologies"[J]. Internet World, 2021(6): 8-9. | |
| 2 | Huang C, Zappone A, Alexandropoulos G, et al. Reconfigurable intelligent surfaces for energy efficiency in wireless communication[J]. IEEE Transactions on Wireless Communications, 2019, 18(99): 4157-4170. |
| 3 | 谢莎, 李浩然, 李玲香, 等. 面向6G网络的太赫兹通信技术研究综述[J]. 移动通信, 2020, 44(6): 36-43. |
| Xie Sha, Li Hao-ran, Li Ling-xiang, et al. A Survey of Terahertz communication technologies for 6G networks[J]. Mobile Communication, 2020, 44(6):36-43. | |
| 4 | Huynh N, Hoang D, Lu X, et al. Ambient backscatter communications: a contemporary survey[J]. IEEE Communications Surveys & Tutorials, 2018, 20(4): 2889-2922. |
| 5 | Chen Z, Björnson E. Channel hardening and favorable propagation in cell-free massive MIMO With stochastic geometry[J]. IEEE Transactions on Communications, 2018, 66(11): 5205-5219. |
| 6 | Akyildiz I, Kak A, Nie S. 6G and beyond: the future of wireless communications systems[J]. IEEE Access, 2020, 8: 133995-134030. |
| 7 | Tan D, Long D, Duong T, et al. Joint optimisation of real-time deployment and resource allocation for UAV-aided disaster emergency communications[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(11): 3411-3424. |
| 8 | Zhang S, Zhang H, Di B, et al. Joint trajectory and power optimization for UAV relay networks[J]. IEEE Communications Letters, 2017, 22(1): 161-164. |
| 9 | Li J, Kang H, Sun G, et al. Physical layer secure communications based on collaborative beamforming for UAV networks: a multi-objective optimization approach[C]∥IEEE Conference on Computer Communications, Vancouver, Canada, 2021: 1-10. |
| 10 | Liu Y, Pan H, Sun G, et al. Joint scheduling and trajectory optimization of charging UAV in wireless rechargeable sensor networks[J]. IEEE Internet of Things Journal, 2021, 9(14): 11796-11813. |
| 11 | Zhao C, Liu J, Sheng M, et al. Multi-UAV trajectory planning for energy-efficient content coverage: a decentralized learning-based approach[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(10): 3193-3207. |
| 12 | Lei L, Shen G, Zhang L, et al. Toward intelligent cooperation of UAV swarms: when machine learning meets digital twin[J]. IEEE Network, 2020, 35(1): 386-392. |
| 13 | Chen M, Wang H, Chang C Y, et al. SIDR: a swarm intelligence-based damage-resilient mechanism for UAV swarm networks[J]. IEEE Access, 2020, 8: 77089-77105. |
| 14 | Zhang X, Luo P, Hu X. Defense success rate evaluation for UAV swarm defense system[C]∥Proceedings of the 2nd International Conference on Intelligent Systems, Metaheuristics & Swarm Intelligence, New York, United States, 2018:127-132. |
| 15 | Ou H, Wu D, Wang S, et al. The research on the efficiency of UAV swarm anti-UAV swarm operations[C]∥International Conference on Man-Machine-Environment System Engineering, Beijing, China, 2021: 341-346. |
| 16 | Zhou X, Wang W, Wang T, et al. A research framework on mission planning of the UAV swarm[C]∥2017 12th System of Systems Engineering Conference, Waikoloa, United States, 2017: 1-6. |
| 17 | Cheng C, Bai G, Zhang Y A, et al. Resilience evaluation for UAV swarm performing joint reconnaissance mission[J]. Chaos: An Interdisciplinary Journal of Nonlinear Science, 2019, 29(5): No. 053132. |
| 18 | Silva D, Oliveira F, Macedo M, et al. On the analysis of a swarm intelligence based coordination model for multiple unmanned aerial vehicles[C]∥2012 Brazilian Robotics Symposium and Latin American Robotics Symposium, Fortaleza, Brazil, 2012: 208-213. |
| 19 | Dong S Y, Zhu X P, Long G Q. Cooperative planning method for swarm UAVs based on hierarchical strategy[C]∥2012 3rd International Conference on System Science, Engineering Design and Manufacturing Informatization, Chengdu, China, 2012: 304-307. |
| 20 | 高杨, 李东生, 程泽新. 无人机分布式集群态势感知模型研究[J]. 电子与信息学报, 2018, 40(6): 1271-1278. |
| Gao Yang, Li Dong-sheng, Cheng Ze-xin. UAV distributed swarm situation awareness model[J]. Journal of Electronics, 2018, 40(6): 1271-1278. | |
| 21 | Zhu L, Yao C, Wang L. Optimal energy efficiency distributed relay decision in UAV swarms[J]. Wireless Personal Communications, 2018, 102(4): 2997-3008. |
| 22 | Zhou Y, Rao B, Wang W. UAV swarm intelligence: recent advances and future trends[J]. IEEE Access, 2020, 8:183856-183878. |
| 23 | 陈健瑞, 王景璟, 侯向往, 等. 挺进深蓝: 从单体仿生到群体智能[J]. 电子学报, 2021, 49(12): 2458-2467. |
| Chen Jian-rui, Wang Jing-jing, Hou Xiang-wang, et al. Advance into ocean: from bionic monomer to swarm intelligence[J]. Journal of Electronics, 2021, 49(12): 2458-2467. | |
| 24 | Rudolph G. Convergence analysis of canonical genetic algorithms[J]. IEEE Transactions on Neural Networks, 1994, 5(1): 96-101. |
| 25 | Regis R. Evolutionary programming for high-dimensional constrained expensive black-box optimization using radial basis functions[J]. IEEE Transactions on Evolutionary Computation, 2013, 18(3): 326-347. |
| 26 | Das S, Suganthan P. Differential evolution: a survey of the state-of-the-art[J]. IEEE Transactions on Evolutionary Computation, 2010, 15(1): 4-31. |
| 27 | Li B, Qi X G, Yu B G, et al. Trajectory planning for UAV based on improved ACO algorithm[J]. IEEE Access, 2019, 8: 2995-3006. |
| 28 | Zhang W, Zhang S, Wu F, et al. Path planning of UAV based on improved adaptive grey wolf optimization algorithm[J]. IEEE Access, 2021, 9: 89400-89411. |
| 29 | Liang S, Fang Z, Sun G, et al. Charging UAV deployment for improving charging performance of wireless rechargeable sensor networks via joint optimization approach[J]. Computer Networks, 2021, 201: No. 108573. |
| 30 | Chen E, Chen J, Mohamed A, et al. Swarm intelligence application to UAV aided IoT data acquisition deployment optimization[J]. IEEE Access, 2020, 8: 175660-175668. |
| 31 | Akay B, Karaboga D. A modified artificial bee colony algorithm for real-parameter optimization[J]. Information Sciences, 2012, 192(1): 120-142. |
| 32 | 牛轶峰, 陈钇廷, 陈润丰, 等. 从国家自然科学基金资助角度分析群体智能发展现状与趋势[J]. 中国人工智能学会通讯, 2020, 10(12): 26-30. |
| Niu Yi-feng, Chen Yi-ting, Chen Run-feng, et al. Analyze the current situation and trend of swarm intelligence development from the perspective of NSFC funding[J]. Communication of Chinese Artificial Intelligence Society, 2020, 10(12): 26-30. | |
| 33 | Tang J, Liu G, Pan Q. A review on representative swarm intelligence algorithms for solving optimization problems: applications and trends[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(10): 1627-1643. |
| 34 | Blum C, Roli A. Metaheuristics in combinatorial optimization: overview and conceptual comparison[J]. ACM Computing Surveys, 2003, 35(3): 268-308. |
| 35 | del Valle Y, Venayagamoorthy G K, Mohagheghi S, et al. Particle swarm optimization: basic concepts, variants and applications in power systems[J]. IEEE Transactions on Evolutionary Computation, 2008, 12(2): 171-195. |
| 36 | Khuwaja A A, Chen Y, Zhao N, et al. A survey of channel modeling for UAV communications[J]. IEEE Communications Surveys & Tutorials, 2018, 20(4): 2804-2821. |
| 37 | Shi L, Marcano N J H, Jacobsen R H. A review on communication protocols for autonomous unmanned aerial vehicles for inspection application[J]. Microprocessors and Microsystems, 2021, 86: No.104340. |
| 38 | Dai F, Chen M, Wei X, et al. Swarm intelligence-inspired autonomous flocking control in UAV networks[J]. IEEE Access, 2019, 7: 61786-61796. |
| 39 | Howden D. Continuous swarm surveillance via distributed priority maps[C]∥Australian Conference on Artificial Life, Melbourne, Australia, 2009: 221-231. |
| 40 | Kalantari E, Bor-Yaliniz I, Yongacoglu A, et al. User association and bandwidth allocation for terrestrial and aerial base stations with backhaul considerations[C]∥2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications, Montreal, Canada, 2017: 1-6. |
| 41 | Sun G, Li J, Liu Y, et al. Time and energy minimization communications based on collaborative beamforming for UAV networks: a multi-objective optimization method[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(11): 3555-3572. |
| 42 | Zheng T, Liu Y, Sun G, et al. Joint optimization of SNR and motion energy consumption for UAV-enabled collaborative beamforming[J]. Wireless Networks, 2022, 28(5): 2001-2016. |
| 43 | Wang G, Zhou S, Niu Z. Mode selection in UAV-aided vehicular network: an evolutionary game approach[C]∥2018 10th International Conference on Wireless Communications and Signal Processing, Hangzhou, China, 2018: 1-6. |
| 44 | Goudos S, Athanasiadou G. Application of an ensemble method to UAV power modeling for cellular communications[J]. IEEE Antennas and Wireless Propagation Letters, 2019, 18(11): 2340-2344. |
| 45 | Tang J, Feng W, Zhang Q, et al. Joint 3D trajectory and power optimization for multiple antenna aided NOMA in UAV networks[C]∥2020 International Conference on Wireless Communications and Signal Processing, Nanjing, China, 2020: 369-375. |
| 46 | Antonio P, Caputo D, Gandelli A, et al. Architecture and methods for UAV-based heterogeneous sensor network applications[C]∥Remote Sensing of the Ocean, Sea Ice, Coastal Waters, and Large Water Regions, Edinburgh, United Kingdom, 2012: 69-78. |
| 47 | Cheng Y, Liao Y, Zhai X. Energy-efficient resource allocation for UAV-empowered mobile edge computing system[C]∥2020 IEEE/ACM 13th International Conference on Utility and Cloud Computing, Leicester, United Kingdom, 2020: 408-413. |
| 48 | He S, Chen J, Jiang F, et al. Energy provisioning in wireless rechargeable sensor networks[J]. IEEE Transactions on Mobile Computing, 2012, 12(10): 1931-1942. |
| 49 | Guo S, Wang C, Yang Y. Joint mobile data gathering and energy provisioning in wireless rechargeable sensor networks[J]. IEEE Transactions on Mobile Computing, 2014, 13(12): 2836-2852. |
| 50 | Zeng Y, Xu J, Zhang R. Energy minimization for wireless communication with rotary-wing UAV[J]. IEEE Transactions on Wireless Communications, 2019, 18(4): 2329-2345. |
| 51 | Fu Y, Mei H, Wang K, et al. Joint optimization of 3D trajectory and scheduling for solar-powered UAV systems[J]. IEEE Transactions on Vehicular Technology, 2021, 70(4): 3972-3977. |
| 52 | Feng W, Zhao N, Ao S, et al. Joint 3D trajectory design and time allocation for UAV-enabled wireless power transfer networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(9): 9265-9278. |
| 53 | Bekmezci I, Sahingoz O K, Temel Ş. Flying ad-hoc networks (FANETs): a survey[J]. Ad Hoc Networks, 2013, 11(3): 1254-1270. |
| 54 | 董超, 陶婷, 冯斯梦, 等. 面向无人机自组网和车联网的媒体接入控制协议研究综述[J]. 电子与信息学报, 2022, 44: 1-13. |
| Dong Chao, Tao Ting, Feng Si-meng, et al. Overview on medium access control protocol in flying ad-hoc NETworks and vehicular ad-hoc NETworks[J]. Journal of Electronics, 2022, 44: 1-13. | |
| 55 | Conti M, Giordano S. Mobile ad hoc networking: milestones, challenges, and new research directions[J]. IEEE Communications Magazine, 2014, 52(1): 85-96. |
| 56 | Gao H, Liu C, Li Y, et al. V2VR: reliable hybrid-network-oriented V2V data transmission and routing considering RSUs and connectivity probability[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(6): 3533-3546. |
| 57 | Yadav A, Verma S. An improved firefly algorithm for routing in flying ad hoc networks[J]. International Journal of Communication Networks and Distributed Systems, 2021, 27(3): 282-298. |
| 58 | Arafat M, Moh S. Localization and clustering based on swarm intelligence in UAV networks for emergency communications[J]. IEEE Internet of Things Journal, 2019, 6(5): 8958-8976. |
| 59 | Wang M. A mobility aware clustering scheme based on swarm intelligence in FANETs[C]∥2020 IEEE/CIC International Conference on Communications in China, Chongqing, China, 2020: 747-752. |
| 60 | Chen B, Rho S. Autonomous tactical deployment of the UAV array using self-organizing swarm intelligence[J]. IEEE Consumer Electronics Magazine, 2020, 9(2): 52-56. |
| 61 | Khare V, Wang F, Wu S, et al. Ad-hoc network of unmanned aerial vehicle swarms for search & destroy tasks[C]∥2008 4th International IEEE Conference Intelligent Systems, Varna, Bulgaria, 2008: 65-72. |
| 62 | Berger J, Happe J, Gagné C, et al. Co-evolutionary information gathering for a cooperative unmanned aerial vehicle team[C]∥2009 12th International Conference on Information Fusion, Seattle, USA, 2009: 347-354. |
| 63 | Singh K, Verma A. A trust model for effective cooperation in flying ad hoc networks using genetic algorithm[C]∥2018 International Conference on Communication and Signal Processing, Chennai, India, 2018: 491-495. |
| 64 | Khan A, Aftab F, Zhang Z. BICSF: bio-inspired clustering scheme for FANETs[J]. IEEE Access, 2019, 7: 31446-31456. |
| 65 | Wu P, Xiao F, Huang H, et al. Load balance and trajectory design in multi-UAV aided large-scale wireless rechargeable networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(11): 13756-13767. |
| 66 | Ma Y, Xu W, Wang W, et al. Research on unmanned airborne millimeter-wave broadband obstacle avoidance radar system based on FPGA[C]∥2nd International Conference on Computer Engineering, Information Science & Application Technology, Wuhan, China, 2016: 820-823. |
| 67 | Li K, Han Y, Ge F, et al. Tracking a dynamic invading target by UAV in oilfield inspection via an improved bat algorithm[J]. Applied Soft Computing, 2020, 90: No. 106150. |
| 68 | Zhang C, Zhen Z, Wang D, et al. UAV path planning method based on ant colony optimization[C]∥2010 Chinese Control and Decision Conference, Xuzhou, China, 2010: 3790-3792. |
| 69 | Shao S, He C, Zhao Y, et al. Efficient trajectory planning for UAVs using hierarchical optimization[J]. IEEE Access, 2021, 9: 60668-60681. |
| 70 | Li K, Han Y, Yan X. Distributed multi-UAV cooperation for dynamic target tracking optimized by an SAQPSO algorithm[J]. ISA Transactions, 2022, 129: 230-242. |
| 71 | Yu Y, Wang H, Liu S, et al. Distributed multi-agent target tracking: a nash-combined adaptive differential evolution method for UAV systems[J]. IEEE Transactions on Vehicular Technology, 2021, 70(8): 8122-8133. |
| 72 | Asim M, Mashwani W, Shah H, et al. An evolutionary trajectory planning algorithm for multi-UAV-assisted MEC system[J]. Soft Computing, 2022, 26(16): 7479-7492. |
| 73 | Chen J, Ye F, Jiang T. Path planning under obstacle-avoidance constraints based on ant colony optimization algorithm[C]∥2017 IEEE 17th International Conference on Communication Technology, Chengdu, China, 2017: 1434-1438. |
| 74 | Shao S, Shi W, Zhao Y, et al. A new method of solving UAV trajectory planning under obstacles and multi-constraint[J]. IEEE Access, 2021, 9: 161161-161180. |
| 75 | Liu H, Chen Q, Pan N, et al. Three-dimensional mountain complex terrain and heterogeneous multi-UAV cooperative combat mission planning[J]. IEEE Access, 2020, 8: 197407-197419. |
| 76 | Ghambari S, Lepagnot J, Jourdan L, et al. UAV path planning in the presence of static and dynamic obstacles[C]∥2020 IEEE Symposium Series on Computational Intelligence, Canberra, Australia, 2020: 465-472. |
| 77 | Nikolos I, Valavanis K, Tsourveloudis N, et al. Evolutionary algorithm based offline/online path planner for UAV navigation[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2003, 33(6): 898-912. |
| 78 | Besada-Portas E, Torre L, Jesus M, et al. Evolutionary trajectory planner for multiple UAVs in realistic scenarios[J]. IEEE Transactions on Robotics, 2010, 26(4): 619-634. |
| 79 | Fan J, Sun H, Sun X, et al. Mission planning of MAV/UAV cooperative combat based on improved genetic algorithm[C]∥2021 China Automation Congress. Beijing, China, 2021: 3264-3269. |
| 80 | Zhen Z, Chen Y, Wen L, et al. An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment[J]. Aerospace Science and Technology, 2020, 100: No. 105826. |
| 81 | Wilhelm J, Rojas J, Eberhart G, et al. Heterogeneous aerial platform adaptive mission planning using genetic algorithms[J]. Unmanned Systems, 2017, 5(1): 19-30. |
| 82 | Zhen Z, Zhu P, Xue Y, et al. Distributed intelligent self-organized mission planning of multi-UAV for dynamic targets cooperative search-attack[J]. Chinese Journal of Aeronautics, 2019, 32(12): 2706-2716. |
| 83 | Zuo J, Liu Z, Chen J, et al. A Multi-agent cluster cooperative confrontation method based on swarm intelligence optimization[C]∥2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering, Nanchang, China, 2021: 668-672. |
| 84 | 黄长强, 赵克新, 韩邦杰, 等. 一种近似动态规划的无人机机动决策方法[J]. 电子与信息学报, 2018, 40(10): 2447-2452. |
| Huang Chang-qiang, Zhao Ke-xin, Han Bang-jie, et al. A UAV maneuver decision method based on approximate dynamic programming[J] Journal of Electronics and Information, 2018, 40(10): 2447-2452. | |
| 85 | 周欢, 赵辉, 韩统, 等. 基于规则的无人机集群飞行与规避协同控制[J]. 系统工程与电子技术, 2016, 38(6): 1374-1382. |
| Zhou Huan, Zhao Hui, Han Tong, et al. Rule based cooperative control of UAV cluster flight and evasion[J]. Systems Engineering and Electronic Technology, 2016, 38(6): 1374-1382. | |
| 86 | 汪瀚洋, 陈亮, 徐海, 等. 基于MOEA/D-ARMS的无人机在线航迹规划[J]. 系统工程与电子技术, 2022, 44(11): 3505-3514. |
| Wang Han-yang, Chen Liang, Xu Hai, et al. UAV online path planning based on MOEA/D-ARMS algorithm[J]. Systems Engineering and Electronic Technology, 2022, 44(11): 3505-3514. | |
| 87 | 张梦琳, 江沸菠, 董莉, 等. 智能无人机轨迹与任务卸载联合优化[J]. 计算机工程与应用, 2020, 56(21): 38-46. |
| Zhang Meng-lin, Jiang Fei-bo, Dong Li, et al Joint optimization of trajectory and task unloading of intelligent UAV[J]. Computer Engineering and Application, 2020, 56(21): 38-46. | |
| 88 | 李世豪, 丁勇, 高振龙. 基于直觉模糊博弈的无人机空战机动决策[J]. 系统工程与电子技术, 2019, 41(5): 1063-1070. |
| Li Shi-hao, Ding Yong, Gao Zhen-long. UAV air combat maneuver decision based on intuitionistic fuzzy game[J]. Systems Engineering and Electronic Technology, 2019, 41(5): 1063-1070. | |
| 89 | Xue C, Ganglin W, Zhe W. The decision making algorithm based on inverse-design method and its application in the UAV autonomous flight control system design[C]∥2010 2nd International Conference on Advanced Computer Control, Shenyang, China, 2010: 169-173. |
| 90 | Smith J, Nguyen T. Autonomous and cooperative robotic behavior based on fuzzy logic and genetic programming[J]. Integrated Computer-aided Engineering, 2007, 14(2): 141-159. |
| 91 | Choi H, Kim Y, Kim H. Genetic algorithm based decentralized task assignment for multiple unmanned aerial vehicles in dynamic environments[J]. International Journal of Aeronautical and Space Sciences, 2011, 12(2): 163-174. |
| 92 | Shaikh P, El-Abd M, Khanafer M, et al. A review on swarm intelligence and evolutionary algorithms for solving the traffic signal control problem[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 23(1): 48-63. |
| 93 | Alladi T, Bansal G, Chamola V, et al. Secauthuav: a novel authentication scheme for UAV-ground station and UAV-UAV communication[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 15068-15077. |
| 94 | Tam G, Cheng Z, Lai Y, et al. Registration of 3D point clouds and meshes: a survey from rigid to nonrigid[J]. IEEE Transactions on Visualization and Computer Graphics, 2012, 19(7): 1199-1217. |
| 95 | Liu X, Chen M, Liu Y, et al. Artificial intelligence aided next-generation networks relying on UAVs[J]. IEEE Wireless Communications, 2020, 28(1): 120-127. |
| [1] | 祁贤雨,王巍,王琳,赵玉飞,董彦鹏. 基于物体语义栅格地图的语义拓扑地图构建方法[J]. 吉林大学学报(工学版), 2023, 53(2): 569-575. |
| [2] | 时小虎,吴佳琦,吴春国,程石,翁小辉,常志勇. 基于残差网络的弯道增强车道线检测方法[J]. 吉林大学学报(工学版), 2023, 53(2): 584-592. |
| [3] | 郭鹏,赵文超,雷坤. 基于改进Jaya算法的双资源约束柔性作业车间调度[J]. 吉林大学学报(工学版), 2023, 53(2): 480-487. |
| [4] | 刘近贞,高国辉,熊慧. 用于脑组织分割的多尺度注意网络[J]. 吉林大学学报(工学版), 2023, 53(2): 576-583. |
| [5] | 赵宏伟,张健荣,朱隽平,李海. 基于对比自监督学习的图像分类框架[J]. 吉林大学学报(工学版), 2022, 52(8): 1850-1856. |
| [6] | 秦贵和,黄俊锋,孙铭会. 基于双手键盘的虚拟现实文本输入[J]. 吉林大学学报(工学版), 2022, 52(8): 1881-1888. |
| [7] | 胡丹,孟新. 基于时变网格的对地观测卫星搜索海上船舶方法[J]. 吉林大学学报(工学版), 2022, 52(8): 1896-1903. |
| [8] | 曲福恒,丁天雨,陆洋,杨勇,胡雅婷. 基于邻域相似性的图像码字快速搜索算法[J]. 吉林大学学报(工学版), 2022, 52(8): 1865-1871. |
| [9] | 白天,徐明蔚,刘思铭,张佶安,王喆. 基于深度神经网络的诉辩文本争议焦点识别[J]. 吉林大学学报(工学版), 2022, 52(8): 1872-1880. |
| [10] | 鲜斌,李杰奇,古训. 基于非线性扰动观测器的无人机地面效应补偿[J]. 吉林大学学报(工学版), 2022, 52(8): 1926-1933. |
| [11] | 周丰丰,朱海洋. 基于三段式特征选择策略的脑电情感识别算法SEE[J]. 吉林大学学报(工学版), 2022, 52(8): 1834-1841. |
| [12] | 周丰丰,张亦弛. 基于稀疏自编码器的无监督特征工程算法BioSAE[J]. 吉林大学学报(工学版), 2022, 52(7): 1645-1656. |
| [13] | 王军,徐彦惠,李莉. 低能耗支持完整性验证的数据融合隐私保护方法[J]. 吉林大学学报(工学版), 2022, 52(7): 1657-1665. |
| [14] | 张玮,张树培,罗崇恩,张生,王国林. 智能汽车紧急工况避撞轨迹规划[J]. 吉林大学学报(工学版), 2022, 52(7): 1515-1523. |
| [15] | 康耀龙,冯丽露,张景安,陈富. 基于谱聚类的高维类别属性数据流离群点挖掘算法[J]. 吉林大学学报(工学版), 2022, 52(6): 1422-1427. |
|
||