吉林大学学报(工学版) ›› 2019, Vol. 49 ›› Issue (6): 2069-2075.doi: 10.13229/j.cnki.jdxbgxb20180674
考虑工具和空间约束的机器人装配线平衡优化
周炳海( ),吴琼
),吴琼
- 同济大学 机械与能源工程学院, 上海 201804
Balancing and optimization of robotic assemble lines withtool and space constraint
Bing-hai ZHOU(),Qiong WU
- College of Mechanical Engineering, Tongji University, Shanghai 201804, China
摘要:
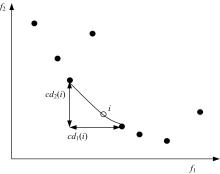
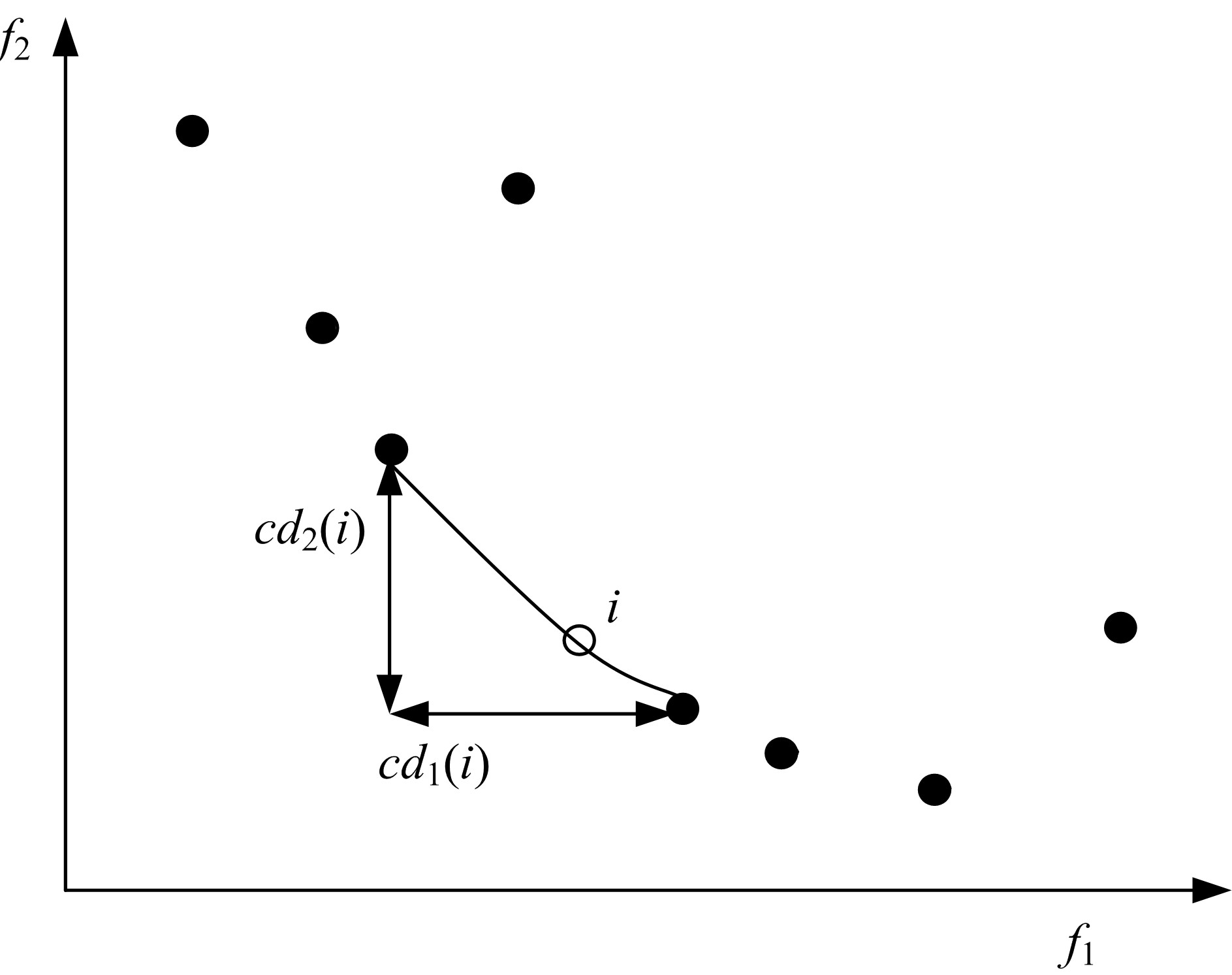
为了提高流水装配线的效率和产能,在进行机器人装配线平衡的同时,优化任务资源的占用空间大小,考虑工具的占用空间及切换次数,在工作站数量最小化以及每个工作站占用空间最小化两个冲突目标之间寻求平衡。针对该带约束的多目标优化问题,首先建立数学模型,然后提出一种改进的多目标免疫克隆算法,基于该问题的特殊性提出了针对性的编码方式,引入了Pareto前沿排序、精英策略、全局搜索策略,以提升该算法的综合性能。最后,对不同规模的实例问题进行优化,并且与其他算法进行对比,以评价本文算法的效率和优越性。结果表明:本文算法在得到的解数量与质量方面都更加有效,对于不同规模问题都具有可行性。
中图分类号:
- TP391



|
| [1] | 贾富淳,孟宪皆,雷雨龙. 基于多目标遗传算法的二自由度动力吸振器优化设计[J]. 吉林大学学报(工学版), 2019, 49(6): 1969-1976. |
| [2] | 沈军,周晓,吉祖勤. 服务动态扩展网络及其结点系统模型的实现[J]. 吉林大学学报(工学版), 2019, 49(6): 2058-2068. |
| [3] | 车翔玖,刘华罗,邵庆彬. 基于Fast RCNN改进的布匹瑕疵识别算法[J]. 吉林大学学报(工学版), 2019, 49(6): 2038-2044. |
| [4] | 周柚,杨森,李大琳,吴春国,王岩,王康平. 基于现场可编程门电路的人脸检测识别加速平台[J]. 吉林大学学报(工学版), 2019, 49(6): 2051-2057. |
| [5] | 马芳武,倪利伟,吴量,聂家弘,徐广健. 轮腿式全地形移动机器人位姿闭环控制[J]. 吉林大学学报(工学版), 2019, 49(6): 1745-1755. |
| [6] | 赵宏伟,王鹏,范丽丽,胡黄水,刘萍萍. 相似性保持实例检索方法[J]. 吉林大学学报(工学版), 2019, 49(6): 2045-2050. |
| [7] | 李宾,周旭,梅芳,潘帅宁. 基于K-means和矩阵分解的位置推荐算法[J]. 吉林大学学报(工学版), 2019, 49(5): 1653-1660. |
| [8] | 王家序,蒋倩倩,李俊阳,韩彦峰,张雷,唐挺. 双圆弧谐波传动柔轮齿形参数多目标优化设计[J]. 吉林大学学报(工学版), 2019, 49(4): 1194-1202. |
| [9] | 李欣,王丹,陈军绪,孙延朋,谷诤巍,徐虹. 手刹固定板冲压成形数值模拟[J]. 吉林大学学报(工学版), 2019, 49(4): 1258-1265. |
| [10] | 孙延君,申铉京,陈海鹏,赵永哲. 基于局部平面线性点的翻拍图像鉴别算法[J]. 吉林大学学报(工学版), 2019, 49(4): 1320-1328. |
| [11] | 李雄飞,宋璐,张小利. 基于协同经验小波变换的遥感图像融合[J]. 吉林大学学报(工学版), 2019, 49(4): 1307-1319. |
| [12] | 翟凤文,党建武,王阳萍,金静,罗维薇. 基于扩展轮廓的快速仿射不变特征提取[J]. 吉林大学学报(工学版), 2019, 49(4): 1345-1356. |
| [13] | 刘元宁,刘帅,朱晓冬,霍光,丁通,张阔,姜雪,郭书君,张齐贤. 基于决策粒子群优化与稳定纹理的虹膜二次识别[J]. 吉林大学学报(工学版), 2019, 49(4): 1329-1338. |
| [14] | 李宾,申国君,孙庚,郑婷婷. 改进的鸡群优化算法[J]. 吉林大学学报(工学版), 2019, 49(4): 1339-1344. |
| [15] | 温海营,任翔,徐卫良,丛明,秦文龙,胡书海. 咀嚼机器人颞下颌关节仿生设计及试验测试[J]. 吉林大学学报(工学版), 2019, 49(3): 943-952. |
|